Learning to See via Epiretinal Implant Stimulation in silico with Model-Based Deep Reinforcement Learning
Pith reviewed 2026-06-28 11:40 UTC · model grok-4.3
The pith
A deep reinforcement learning agent learns to combine isotropic and anisotropic phosphenes to form more intelligible images than naive stimulation for virtual epiretinal implant patients.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
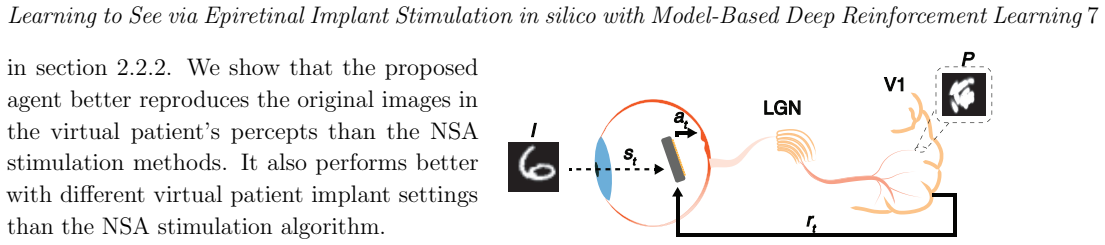
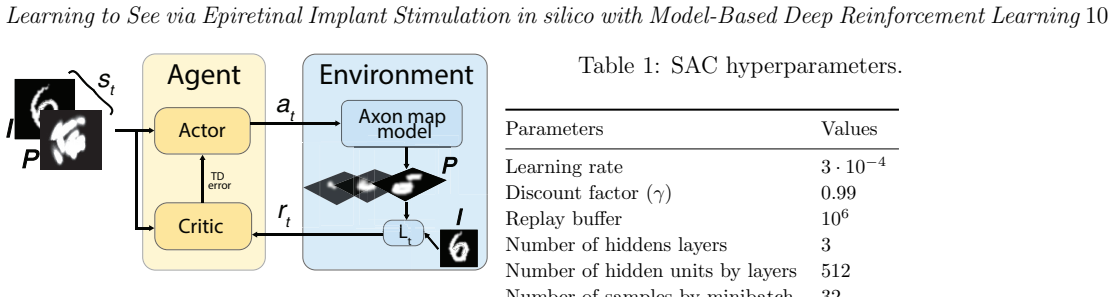
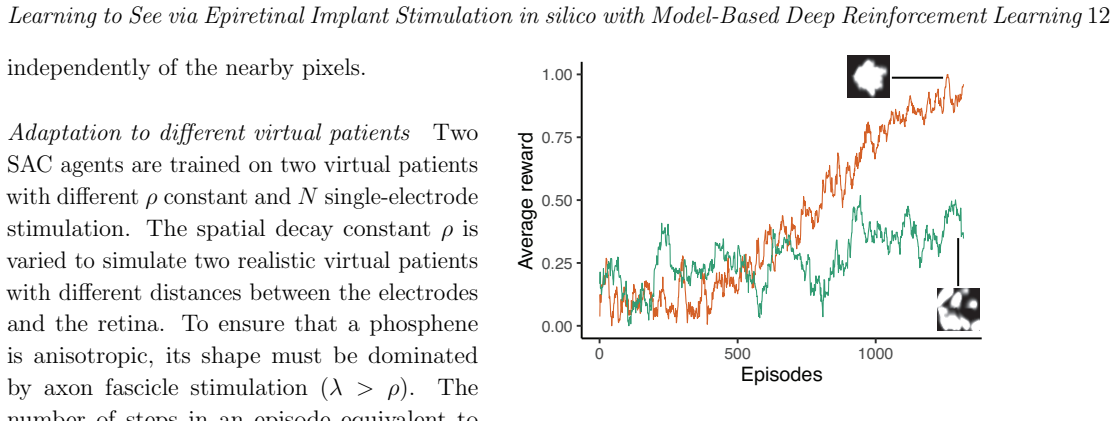
We train a deep reinforcement learning agent that learns to assemble isotropic and anisotropic shapes to form an image in the rlretina environment. The agent is trained in a model-based data generation fashion using the psychophysically validated axon map model to render images as perceived by different virtual patients. We show that the agent can generate more intelligible images compared to the naive method in different virtual patients.
What carries the argument
The rlretina environment, which formalizes epiretinal stimulation as a stroke-based rendering task that assembles isotropic and anisotropic phosphenes rendered through the axon map model and scored by error-based or perception-based rewards.
If this is right
- Agents can discover non-obvious combinations of shape types that improve overall image intelligibility.
- Both error-based and perception-based reward signals are sufficient to train useful policies.
- Model-based training on multiple virtual patients produces strategies that generalize across different axon maps.
- Avoiding or incorporating axon fascicle stimulation can be treated as a learnable decision rather than a fixed preprocessing rule.
Where Pith is reading between the lines
- The same environment could support online adaptation if the axon map model were updated from patient feedback during use.
- The approach might transfer to other sensory prostheses that produce elongated or oriented percepts, such as cochlear implants or visual cortex arrays.
- Clinical validation would require mapping the learned policies back to safe charge-delivery constraints not fully explored in the virtual setting.
Load-bearing premise
The axon map model accurately predicts how actual patients will perceive the generated combinations of shapes.
What would settle it
Deliver the agent's learned stimulation patterns to real epiretinal implant users and measure whether they recognize the target images more accurately than with naive patterns.
Figures

read the original abstract
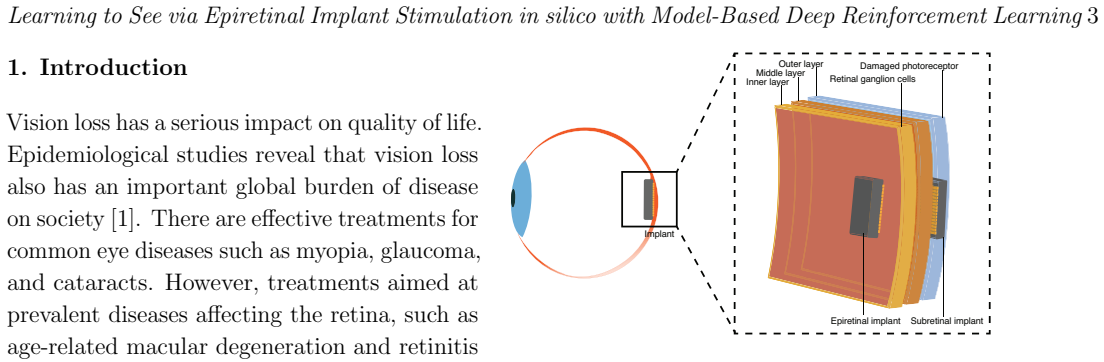
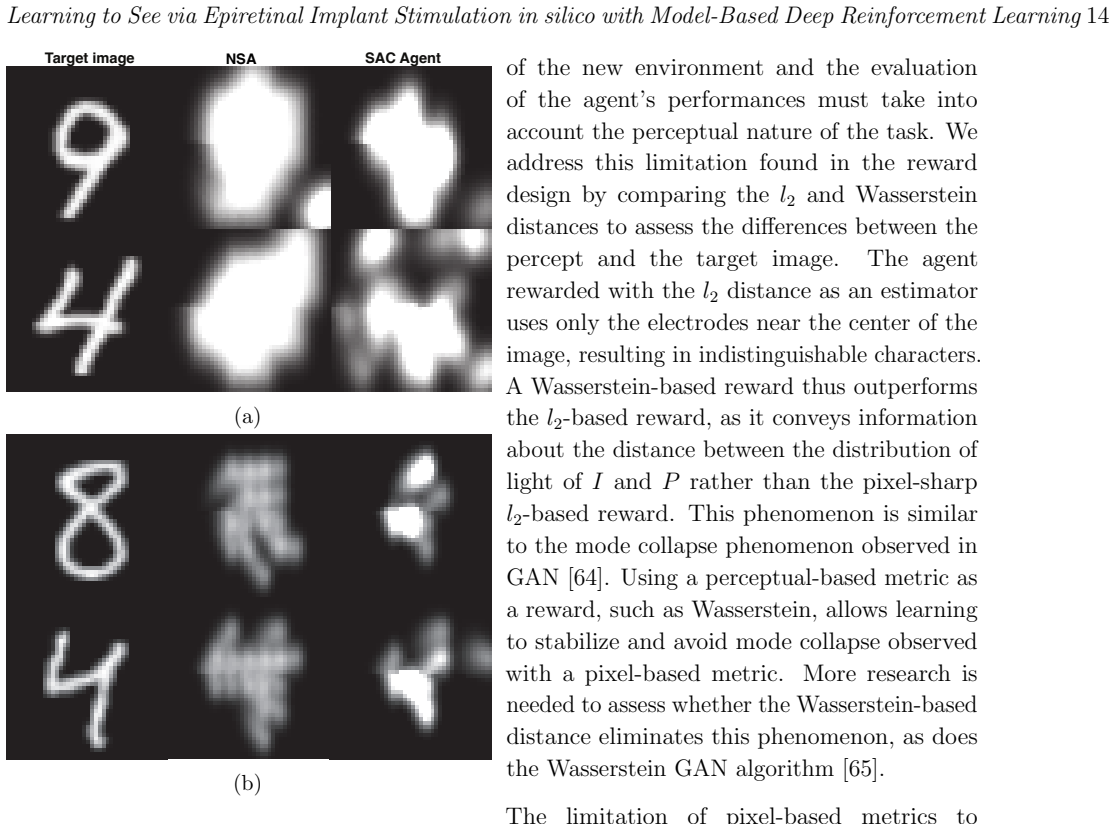
Objective: Diseases such as age-related macular degeneration and retinitis pigmentosa cause the degradation of the photoreceptor layer. One approach to restore vision is to electrically stimulate the surviving retinal ganglion cells with a microelectrode array such as epiretinal implants. Epiretinal implants are known to generate visible anisotropic shapes elongated along the axon fascicles of neighboring retinal ganglion cells. Recent work has demonstrated that to obtain isotropic pixel-like shapes, it is possible to map axon fascicles and avoid stimulating them by inactivating electrodes or lowering stimulation current levels. Avoiding axon fascicle stimulation aims to remove brushstroke-like shapes in favor of a more reduced set of pixel-like shapes. Approach: In this study, we propose the use of isotropic and anisotropic shapes to render intelligible images on the retina of a virtual patient in a reinforcement learning environment named rlretina. The environment formalizes the task as using brushstrokes in a stroke-based rendering task. Main Results: We train a deep reinforcement learning agent that learns to assemble isotropic and anisotropic shapes to form an image. We investigate which error-based or perception-based metrics is adequate to reward the agent. The agent is trained in a model-based data generation fashion using the psychophysically validated axon map model to render images as perceived by different virtual patients. We show that the agent can generate more intelligible images compared to the naive method in different virtual patients. Significance: This work shares a new way to address epiretinal stimulation that constitutes a first step towards improving visual acuity in artificially-restored vision using anisotropic phosphenes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the rlretina reinforcement-learning environment for epiretinal implant stimulation. It models virtual patients via the psychophysically validated axon-map model, frames image formation as a stroke-based rendering task that combines isotropic and anisotropic phosphenes, and trains a model-based deep RL agent to select stimulation patterns. The central claim is that the learned policy produces more intelligible renderings than a naive baseline across multiple virtual patients when evaluated under error-based or perception-based reward metrics.
Significance. If the in-silico superiority holds under the chosen metrics and the axon-map model is accepted as the ground truth for the virtual patients, the work demonstrates a novel application of model-based DRL to prosthetic vision and shows that explicitly modeling both phosphene shapes can improve rendering quality inside the simulator. The purely simulated setting allows controlled ablation of reward functions and patient variability, which is a methodological strength, but downstream clinical significance remains conditional on future transfer or psychophysical validation.
major comments (2)
- [Abstract] Abstract (Main Results paragraph): the claim that the agent 'can generate more intelligible images compared to the naive method' is presented without any quantitative metrics, error bars, statistical tests, or even the identity of the winning reward function, rendering the central empirical claim impossible to evaluate.
- [Approach] Approach section: the reward functions are described only as 'error-based or perception-based' without explicit mathematical definitions or ablation results showing which metric actually drives learning; this is load-bearing because the paper states it investigates 'which ... metric is adequate to reward the agent.'
minor comments (3)
- [Abstract] Abstract: grammatical error ('which error-based or perception-based metrics is adequate') and awkward phrasing ('in a model-based data generation fashion').
- [Main Results] The manuscript should include a table or figure that directly compares the final intelligibility scores (with standard deviations) of the RL agent versus the naive baseline for each virtual patient.
- [Methods] No description is given of the state representation, action space discretization, or network architecture used by the DRL agent.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We agree that the abstract requires quantitative support for its central claim and that the reward functions need explicit definitions plus ablation results. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract (Main Results paragraph): the claim that the agent 'can generate more intelligible images compared to the naive method' is presented without any quantitative metrics, error bars, statistical tests, or even the identity of the winning reward function, rendering the central empirical claim impossible to evaluate.
Authors: We acknowledge that the abstract presents the main result only qualitatively. The full manuscript contains the supporting quantitative comparisons across virtual patients, but these are not summarized in the abstract. We will revise the abstract to report the key performance metrics (including means and variability) under the best reward function, along with the identity of that function, so the claim can be evaluated directly from the abstract. revision: yes
-
Referee: [Approach] Approach section: the reward functions are described only as 'error-based or perception-based' without explicit mathematical definitions or ablation results showing which metric actually drives learning; this is load-bearing because the paper states it investigates 'which ... metric is adequate to reward the agent.'
Authors: We agree that the current description is insufficient given the paper's explicit goal of investigating reward adequacy. We will add the precise mathematical formulations of both the error-based and perception-based reward functions in the Approach section. We will also include ablation results that compare the metrics' effects on learning dynamics and final rendering quality across the virtual patients. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper's derivation chain is self-contained and non-circular. It trains an RL agent inside the rlretina environment whose perception model is an externally validated axon-map model (psychophysically validated, not derived inside the paper). The central claim is an in-silico performance comparison (agent vs. naive baseline) under chosen reward metrics; this comparison does not reduce to a fitted parameter being renamed as a prediction, nor to any self-citation chain, self-definition, or ansatz smuggled from prior author work. No equations or steps in the abstract or described method exhibit the enumerated circular patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The axon map model accurately renders perceived images for virtual patients.
Reference graph
Works this paper leans on
-
[1]
Developmental disabilities among children younger than 5 years in 195 countries and territories, 1990–2016: a systematic analysis for the Global Burden of Disease Study 2016
Olusanya BO, Davis AC, Wertlieb D, Boo NY, Nair MKC, Halpern R, et al. Developmental disabilities among children younger than 5 years in 195 countries and territories, 1990–2016: a systematic analysis for the Global Burden of Disease Study 2016. The Lancet Global Health. 2018;6(10):e1100 e1121
1990
-
[2]
Retinitis pigmentosa
Hartong DT, Berson EL, Dryja TP. Retinitis pigmentosa. The Lancet. 2006;368(9549):1795 1809
2006
-
[3]
Prevalence and causes of visual impairment and blindness among 9980 Scandinavian adults: the Copenhagen City Eye Study
Buch H, Vinding T, La Cour M, Appleyard M, Jensen GB, Nielsen NV. Prevalence and causes of visual impairment and blindness among 9980 Scandinavian adults: the Copenhagen City Eye Study. Ophthalmology. 2004;111(1):53-61
2004
-
[4]
Age-Specific Prevalence and Causes of Blindness and Visual Impairment in an Older Population: The Rotterdam Study
Klaver CCW, Wolfs RCW, Vingerling JR, Hofman A, de Jong PTVM. Age-Specific Prevalence and Causes of Blindness and Visual Impairment in an Older Population: The Rotterdam Study. Archives of Ophthalmology. 1998 05;116(5):653- 8
1998
-
[5]
Retinal implants: a systematic review
Chuang AT, Margo CE, Greenberg PB. Retinal implants: a systematic review. British Journal of Ophthalmology. 2014;98(7):852-6
2014
-
[6]
Visual perception elicited by electrical stimulation of retina in blind humans
Humayun MS, De Juan E, Dagnelie G, Greenberg RJ, Propst RH, Phillips DH. Visual perception elicited by electrical stimulation of retina in blind humans. Archives of ophthalmology. 1996;114(1):40-6
1996
-
[7]
Will retinal implants restore vision? Science
Zrenner E. Will retinal implants restore vision? Science. 2002;295(5557):1022-5
2002
-
[8]
Emerging approaches for restoration of hearing and vision
Kleinlogel S, Vogl C, Jeschke M, Neef J, Moser T. Emerging approaches for restoration of hearing and vision. Physiological reviews. 2020;100(4):1467-525
2020
-
[9]
Simultaneous perception of prosthetic and natural vision in AMD patients
Palanker D, Le Mer Y, Mohand-Said S, Sahel JA. Simultaneous perception of prosthetic and natural vision in AMD patients. Nature Communications. 2022;13(1):1-6
2022
-
[10]
Epiretinal vs
Pavlova P, Boneva J, Shandurkov I. Epiretinal vs. subretinal implant in surgical treatment of retinitis pigmentosa–a review. Bulgarian Review of Ophthalmology. 2019;63(1):13-8
2019
-
[11]
Retinal Stimulator ASIC Architecture Based on a Joint Power and Data Optical Link
Lemaire W, Benhouria M, Koua K, Besrour M, Gauthier LP, Martin-Hardy G, et al. Retinal Stimulator ASIC Architecture Based on a Joint Power and Data Optical Link. IEEE Journal of Solid-State Circuits. 2021;56(7):2158-70
2021
-
[12]
A model of ganglion axon pathways accounts for percepts elicited by retinal implants
Beyeler M, Nanduri D, Weiland JD, Rokem A, Boynton GM, Fine I. A model of ganglion axon pathways accounts for percepts elicited by retinal implants. Scientific reports. 2019;9(1):1-16
2019
-
[13]
Responses of retinal ganglion cells to extracellular electrical stimulation, from single cell to population: model-based analysis
Tsai D, Chen S, Protti DA, Morley JW, Suaning GJ, Lovell NH. Responses of retinal ganglion cells to extracellular electrical stimulation, from single cell to population: model-based analysis. PloS One. 2012;7(12):e53357
2012
-
[14]
pulse2percept: A Python-based simulation framework for bionic vision
Beyeler M, Boynton GM, Fine I, Rokem A. pulse2percept: A Python-based simulation framework for bionic vision. BioRxiv:101101/148015. 2017:148015
2017
-
[15]
The Argus®II retinal prosthesis system
Luo YHL, Da Cruz L. The Argus®II retinal prosthesis system. Progress in Retinal and Eye Research. 2016;50:89-107
2016
-
[16]
Edge detection algorithm based on difference of gaussian for visual prosthesis
Guo F, Duan J, Huang S, Xiao Y, Chu R. Edge detection algorithm based on difference of gaussian for visual prosthesis. In: 2023 IEEE 6th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC). vol. 6. IEEE; 2023. p. 1331-4
2023
-
[17]
Global activity shaping strategies for a retinal implant
Spencer MJ, Kameneva T, Grayden DB, Meffin H, Burkitt AN. Global activity shaping strategies for a retinal implant. Journal of Neural Engineering. 2019;16(2):026008
2019
-
[18]
A Deep Learning-based in silico Framework for Optimization on Retinal Prosthetic Stimulation
Wu Y, Karetic I, Stegmaier J, Walter P, Merhof D. A Deep Learning-based in silico Framework for Optimization on Retinal Prosthetic Stimulation. arXiv preprint arXiv:230203570. 2023
2023
-
[19]
Hybrid Neural Autoencoders for Stimulus Encoding in Visual and Other Sensory Neuroprostheses
Granley J, Relic L, Beyeler M. Hybrid Neural Autoencoders for Stimulus Encoding in Visual and Other Sensory Neuroprostheses. In: Oh AH, Agarwal A, Belgrave D, Cho K, editors. Advances in Neural Information Processing Systems; 2022. Available from: https:// openreview.net/forum?id=9xVWIHFSyfl
2022
-
[20]
Advances in visual prostheses: engineering and biological challenges
Borda E, Ghezzi D. Advances in visual prostheses: engineering and biological challenges. Progress in Biomedical Engineering. 2022;4(3):032003
2022
-
[21]
Perceptual efficacy of electrical stimulation of human retina with a microelectrode array during short-term surgical trials
Rizzo JF, Wyatt J, Loewenstein J, Kelly S, Shire D. Perceptual efficacy of electrical stimulation of human retina with a microelectrode array during short-term surgical trials. Investigative Ophthal- mology & Visual Science. 2003;44(12):5362-9
2003
-
[22]
Minimizing activation of overlying axons with epiretinal stimulation: The role of fiber orientation and electrode configuration
Esler TB, Kerr RR, Tahayori B, Grayden DB, Meffin H, Burkitt AN. Minimizing activation of overlying axons with epiretinal stimulation: The role of fiber orientation and electrode configuration. PloS one. 2018;13(3):e0193598
2018
-
[23]
Greedy Optimization of Electrode Arrangement for Epiretinal Prostheses
Bruce A, Beyeler M. Greedy Optimization of Electrode Arrangement for Epiretinal Prostheses. Learning to See via Epiretinal Implant Stimulation in silico with Model-Based Deep Reinforcement Learning17 arXiv:220302493. 2022
2022
-
[24]
Spatially patterned electrical stimulation to enhance resolution of retinal prostheses
Jepson LH, Hottowy P, Mathieson K, Gunning DE, Dabrowski W, Litke AM, et al. Spatially patterned electrical stimulation to enhance resolution of retinal prostheses. Journal Of Neuroscience. 2014;34(14):4871-81
2014
-
[25]
Activation of ganglion cells and axon bundles using epiretinal electrical stimulation
Grosberg LE, Ganesan K, Goetz GA, Madugula SS, Bhaskhar N, Fan V, et al. Activation of ganglion cells and axon bundles using epiretinal electrical stimulation. Journal of Neurophysiology. 2017;118(3):1457-71
2017
-
[26]
Automatic Identification of Axon Bundle Activation for Epiretinal Prosthesis
Tandon P, Bhaskhar N, Shah N, Madugula S, Grosberg L, Fan VH, et al. Automatic Identification of Axon Bundle Activation for Epiretinal Prosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2021;29:2496-502
2021
-
[27]
Spatially patterned bi-electrode epiretinal stim- ulation for axon avoidance at cellular res- olution
Vilkhu RS, Madugula SS, Grosberg LE, Gogli- ettino AR, Hottowy P, Dabrowski W, et al. Spatially patterned bi-electrode epiretinal stim- ulation for axon avoidance at cellular res- olution. Journal of Neural Engineering. 2021;18(6):066007
2021
-
[28]
Improved visual acuity using a retinal implant and an optimized stimulation strategy
Tong W, Stamp M, Apollo NV, Ganesan K, Meffin H, Prawer S, et al. Improved visual acuity using a retinal implant and an optimized stimulation strategy. Journal of Neural Engineering. 2019;17(1):016018
2019
-
[29]
Evaluation of effects of electrical stimulation in the retina with Optical Coherence Tomography
Gonzalez-Calle A, Weiland JD. Evaluation of effects of electrical stimulation in the retina with Optical Coherence Tomography. vol. 2016; 2016. p. 6182-5
2016
-
[30]
Stimulation strategies for selective activation of retinal ganglion cell soma and threshold reduction
Chang YC, Ghaffari DH, Chow RH, Weiland JD. Stimulation strategies for selective activation of retinal ganglion cell soma and threshold reduction. Journal of neural engineering. 2019;16(2):026017
2019
-
[31]
The effect of waveform asymmetry on perception with epiretinal prostheses
Ghaffari DH, Finn KE, Jeganathan VSE, Patel U, Wuyyuru V, Roy A, et al. The effect of waveform asymmetry on perception with epiretinal prostheses. Journal of neural engineering. 2020;17(4):045009
2020
-
[32]
A survey of stroke-based rendering
Hertzmann A. A survey of stroke-based rendering. In: Inst. of Electrical and Electronics Engineers
-
[33]
Unsupervised Doodling and Painting with Improved SPIRAL
Mellor JFJ, Park E, Ganin Y, Babuschkin I, Kulkarni T, Rosenbaum D, et al. Unsupervised Doodling and Painting with Improved SPIRAL. arXiv:191001007. 2019
2019
-
[34]
StrokeNet: A Neural Painting Environment
Zheng N, Jiang Y, Huang D. StrokeNet: A Neural Painting Environment. In: Int. Conf. on Learning Representations; 2019
2019
-
[35]
Learning to Doodle with Stroke Demonstrations and Deep Q-Networks
Zhou T, Fang C, Wang Z, Yang J, Kim B, Chen Z, et al. Learning to Doodle with Stroke Demonstrations and Deep Q-Networks. In: British Machine Vision Conf.; 2018
2018
-
[36]
A Neural Representation of Sketch Drawings
Ha D, Eck D. A Neural Representation of Sketch Drawings. arXiv:170403477. 2017
2017
-
[37]
Learning to Paint With Model-based Deep Reinforcement Learning
Huang Z, Heng W, Zhou S. Learning to Paint With Model-based Deep Reinforcement Learning. arXiv:190304411. 2019
2019
-
[38]
Retina implant adjustment with reinforcement learning
Becker M, Braun M, Eckmiller R. Retina implant adjustment with reinforcement learning. In: Proc. of the 1998 IEEE Int. Conf. on Acoustics, Speech and Signal Processing, ICASSP’98 (Cat. No. 98CH36181). vol. 2. IEEE; 1998. p. 1181-4
1998
-
[39]
Tunable retina encoders for retina implants: why and how
Eckmiller R, Neumann D, Baruth O. Tunable retina encoders for retina implants: why and how. Journal Of Neural Engineering. 2005;2(1):S91-S104
2005
-
[40]
Optimization of neuroprosthetic vision via end-to-end deep reinforcement learning
K¨ u¸ c¨ ukoglu B, Rueckauer B, Ahmad N, de Ruyter van Steveninck J, G ¨”u¸ cl¨”u U, van Gerven M. Optimization of neuroprosthetic vision via end-to-end deep reinforcement learning. bioRxiv. 2022:2
2022
-
[41]
Spatio-temporal filter adjustment from evaluative feedback for a retina implant
Becker M, Eckmiller R. Spatio-temporal filter adjustment from evaluative feedback for a retina implant. In: Int. Conf. on Artificial Neural Networks; 1997. p. 1181-6
1997
-
[42]
Reinforcement learning and its relationship to supervised learning
Barto AG, Dietterich TG. Reinforcement learning and its relationship to supervised learning. Handbook of learning and approximate dynamic programming. 2004;10:9780470544785
2004
-
[43]
Recurrent World Models Facilitate Policy Evolution
Ha D, Schmidhuber J. Recurrent World Models Facilitate Policy Evolution. arXiv:180901999. 2018
2018
-
[44]
Reinforcement learning: an introduction
Sutton RS, Barto AG. Reinforcement learning: an introduction. Cambridge, MA: The MIT Press; 2018
2018
-
[45]
Reinforcement learning: An introduction
Sutton RS, Barto AG. Reinforcement learning: An introduction. Cambridge MA: MIT press; 2018
2018
-
[46]
OpenAI Gym
Brockman G, Cheung V, Pettersson L, Schneider J, Schulman J, Tang J, et al. OpenAI Gym. arXiv:160601540. 2016
2016
-
[47]
A mathematical description of nerve fiber bundle trajectories and their variability in the human retina
Jansonius NM, Nevalainen J, Selig B, Zangwill LM, Sample PA, Budde WM, et al. A mathematical description of nerve fiber bundle trajectories and their variability in the human retina. Vision Research. 2009;49(17):2157-63
2009
-
[48]
The mnist database of handwritten digit images for machine learning research
Deng L. The mnist database of handwritten digit images for machine learning research. IEEE Learning to See via Epiretinal Implant Stimulation in silico with Model-Based Deep Reinforcement Learning18 Signal Processing Magazine. 2012;29(6):141-2
2012
-
[49]
Probebuchstaben zur bestimmung der sehscharfe
Snellen H. Probebuchstaben zur bestimmung der sehscharfe. Ultrecht: Van de Weijer; 1862
-
[50]
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor
Haarnoja T, Zhou A, Abbeel P, Levine S. Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor. arXiv:180101290. 2018
2018
-
[51]
Deterministic policy gradient algorithms
Silver D, Lever G, Heess N, Degris T, Wierstra D, Riedmiller M. Deterministic policy gradient algorithms. In: Int. conf. on machine learning. PMLR; 2014. p. 387-95
2014
-
[52]
Continuous control with deep reinforcement learning
Lillicrap TP, Hunt JJ, Pritzel A, Heess N, Erez T, Tassa Y, et al. Continuous control with deep reinforcement learning. arXiv:150902971. 2019
2019
-
[53]
An intriguing failing of convolutional neural networks and the coordconv solution
Liu R, Lehman J, Molino P, Petroski Such F, Frank E, Sergeev A, et al. An intriguing failing of convolutional neural networks and the coordconv solution. Advances in neural information processing systems. 2018;31
2018
-
[54]
RLlib: Abstractions for distributed reinforcement learning
Liang E, Liaw R, Nishihara R, Moritz P, Fox R, Goldberg K, et al. RLlib: Abstractions for distributed reinforcement learning. In: Int. Conf. on Machine Learning. PMLR; 2018. p. 3053-62
2018
-
[55]
Human-level control through deep reinforcement learning
Mnih V, Kavukcuoglu K, Silver D, Rusu AA, Veness J, Bellemare MG, et al. Human-level control through deep reinforcement learning. Nature. 2015;518(7540):529-33
2015
-
[56]
Adam: A method for stochastic optimization
Kingma DP, Ba J. Adam: A method for stochastic optimization. arXiv:14126980. 2014
2014
-
[57]
Wasserstein Generative Adversarial Networks
Arjovsky M, Chintala S, Bottou L. Wasserstein Generative Adversarial Networks. In: Precup D, Teh YW, editors. Proc. of the 34th Int. Conf. on Machine Learning. vol. 70 of Proceedings of Machine Learning Research. PMLR; 2017. p. 214-23
2017
-
[58]
Sinkhorn Distances: Lightspeed Computation of Optimal Transport
Cuturi M. Sinkhorn Distances: Lightspeed Computation of Optimal Transport. In: Burges CJ, Bottou L, Welling M, Ghahramani Z, Weinberger KQ, editors. Advances in Neural Information Processing Systems. vol. 26. Curran Associates, Inc.; 2013
2013
-
[59]
Super- resolution with deep convolutional sufficient statistics
Bruna J, Sprechmann P, LeCun Y. Super- resolution with deep convolutional sufficient statistics. arXiv:151105666. 2015
2015
-
[60]
Photo-realistic single image super-resolution using a generative adversarial network
Ledig C, Theis L, Husz´ ar F, Caballero J, Cunningham A, Acosta A, et al. Photo-realistic single image super-resolution using a generative adversarial network. In: Proc. of the IEEE conf. on computer vision and pattern recognition
-
[61]
Loss Functions for Neural Networks for Image Processing
Zhao H, Gallo O, Frosio I, Kautz J. Loss Functions for Neural Networks for Image Processing. arXiv:151108861. 2015
2015
-
[62]
Image quality assessment: from error visibility to structural similarity
Wang Z, Bovik AC, Sheikh HR, Simoncelli EP. Image quality assessment: from error visibility to structural similarity. IEEE Transactions on Image Processing. 2004;13(4):600-12
2004
-
[63]
Migration of retinal cells through a perforated membrane: implications for a high-resolution prosthesis
Palanker D, Huie P, Vankov A, Aramant R, Seiler M, Fishman H, et al. Migration of retinal cells through a perforated membrane: implications for a high-resolution prosthesis. Investigative ophthalmology & visual science. 2004;45(9):3266- 70
2004
-
[64]
Unrolled generative adversarial networks
Metz L, Poole B, Pfau D, Sohl-Dickstein J. Unrolled generative adversarial networks. arXiv:161102163. 2016
2016
-
[65]
Wasserstein GAN
Arjovsky M, Chintala S, Bottou L. Wasserstein GAN. arXiv:170107875. 2017
2017
-
[66]
Frequency and amplitude modulation have different effects on the percepts elicited by retinal stimulation
Nanduri D, Fine I, Horsager A, Boynton GM, Humayun MS, Greenberg RJ, et al. Frequency and amplitude modulation have different effects on the percepts elicited by retinal stimulation. Investigative ophthalmology & visual science. 2012;53
2012
-
[67]
Deep Learning–Based Perceptual Stimulus Encoder for Bionic Vision
Relic L, Zhang B, Tuan YL, Beyeler M. Deep Learning–Based Perceptual Stimulus Encoder for Bionic Vision. In: Assoc. for Computing Machinery: Augmented Humans 2022; 2022. p. 323–325
2022
-
[68]
PyTorch: An Imperative Style, High-Performance Deep Learning Library
Paszke A, Gross S, Massa F, Lerer A, Bradbury J, Chanan G, et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In: Advances in Neural Information Processing Systems 32; 2019. p. 8024-35
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.