DSIP: A Dynamic Coordination Planner for Signal-Free Intersections using Diffusion-Model-Based Multi-Agent Motion Planning
Pith reviewed 2026-07-01 02:12 UTC · model grok-4.3
The pith
DSIP uses a diffusion model to coordinate connected vehicles at intersections without traffic signals, cutting average delay and raising speeds versus fixed signals or reinforcement learning controllers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DSIP replaces phase-based signal control with a generative diffusion process that produces coordinated, continuous trajectories for multiple connected and automated vehicles, and under idealized conditions this yields lower average delay and higher average speeds than both fixed-time control and state-of-the-art reinforcement-learning controllers, especially as traffic density increases.
What carries the argument
The diffusion-model-based multi-agent motion planning framework that generates joint trajectories for connected vehicles to enable signal-free intersection passage.
If this is right
- Average vehicle delay drops relative to fixed-time signals and reinforcement-learning baselines in medium- and high-density flows.
- Average travel speed stays higher than the comparison methods across the tested densities.
- The diffusion-based planner supplies a scalable foundation for future autonomous intersection management.
- Coordination is achieved without physical infrastructure changes, offering a software-only route to higher intersection throughput.
Where Pith is reading between the lines
- The same diffusion planner could be extended to mixed fleets containing human-driven vehicles whose behavior must be predicted rather than controlled.
- Real-time replanning frequency would need to be measured to determine whether the method remains practical on embedded vehicle hardware.
- Integration with existing adaptive signal systems could serve as a transitional step before full signal removal.
Load-bearing premise
The performance gains are measured under idealized communication and perfect execution with no delays or errors.
What would settle it
A controlled simulation or field test that adds realistic communication latency or execution noise and measures whether the reported delay reductions remain.
Figures



read the original abstract
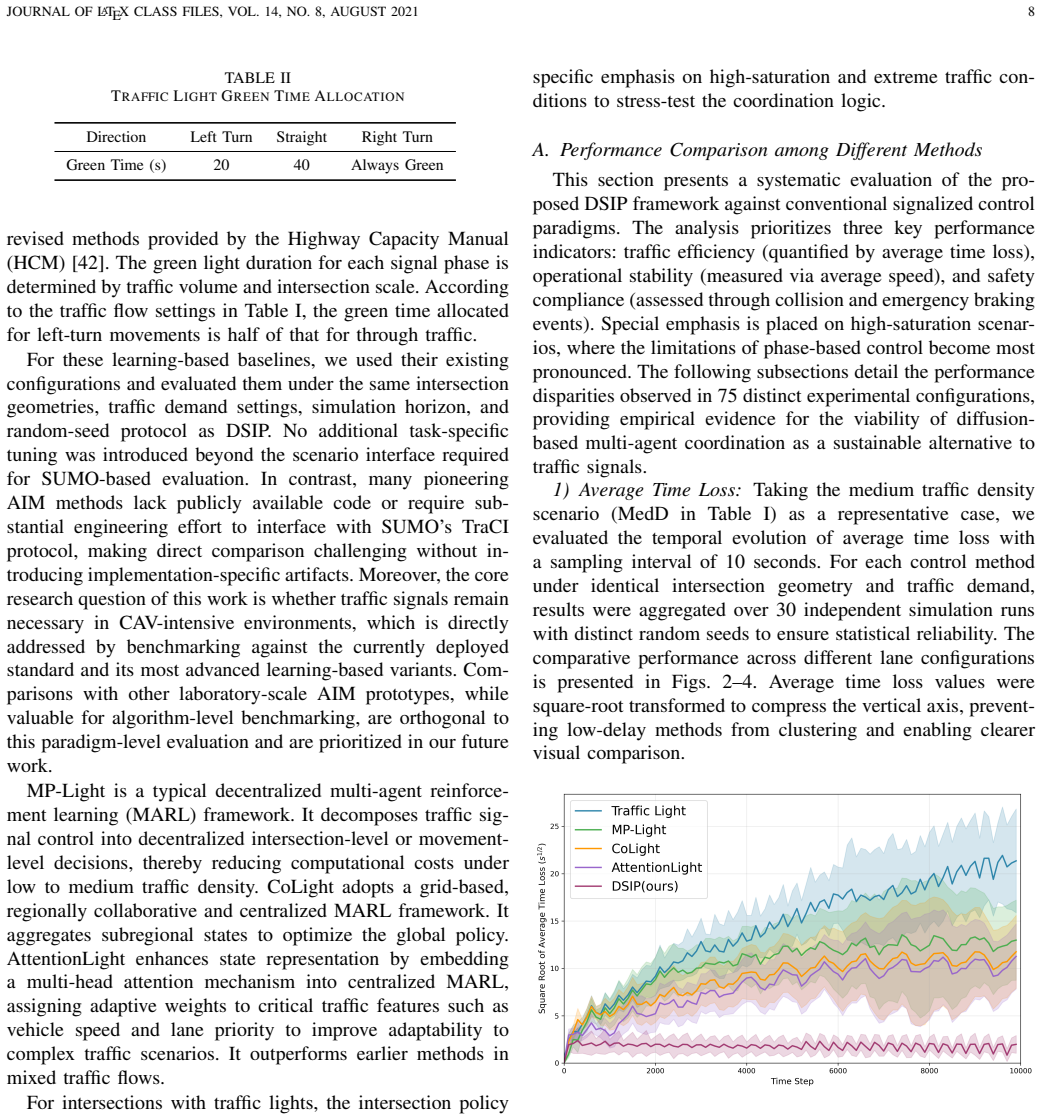
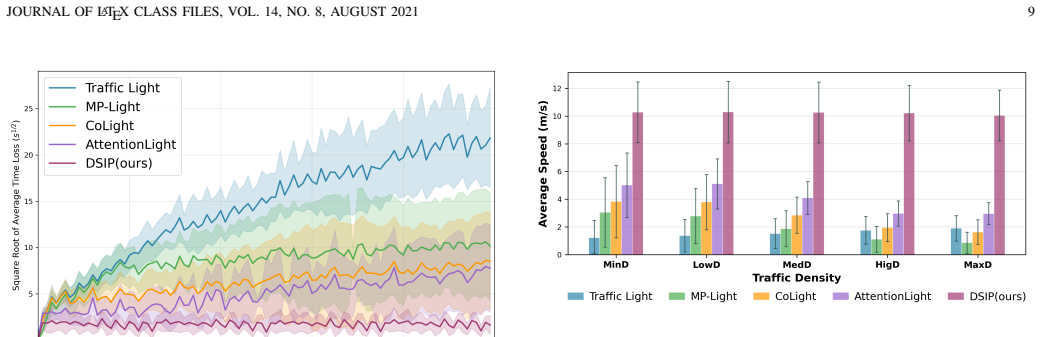
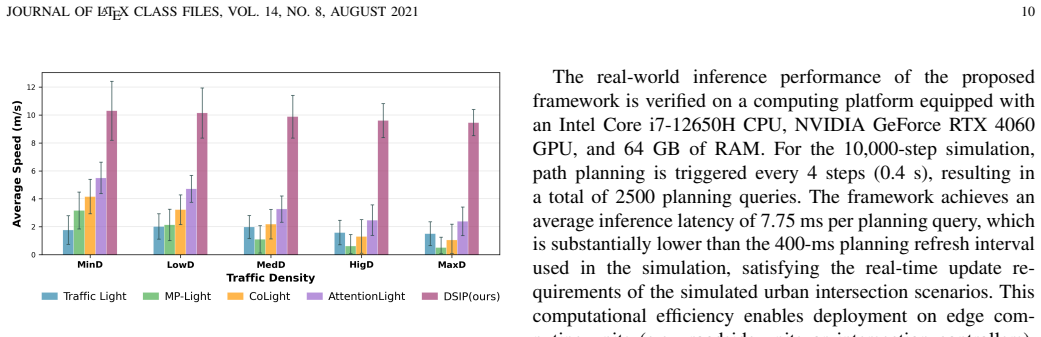
Traffic signal control at urban intersections inherently introduces stop-and-go behavior, resulting in increased delays and reduced traffic efficiency, especially under high traffic demand. With the emergence of connected and automated vehicles (CAVs), trajectory-level coordination has emerged as a high-potential strategy to augment or transcend conventional phase-based management. This paper proposes DSIP (Diffusion-model-based Signal-free Intersection Planner), a multi-agent motion planning framework driven by a generative diffusion process. DSIP shifts the intersection management paradigm from discrete temporal phasing to continuous multi-vehicle trajectory optimization. This work evaluates the theoretical upper-bound performance of this coordination strategy under idealized communication and execution conditions to isolate the core benefits of the diffusion-driven approach. Using the SUMO platform, we evaluate DSIP across diverse four-leg intersection configurations. Experimental results demonstrate that DSIP significantly reduces average delay and maintains higher average speed compared to both fixed-time signal control and state-of-the-art reinforcement-learning-based controllers, particularly in medium- to high-density traffic. These findings suggest that diffusion-based trajectory planning provides a scalable and robust foundation for future autonomous intersection management. By unlocking latent intersection capacity through software-defined coordination, this approach offers a cost-effective pathway to improve urban traffic flow efficiency without requiring physical infrastructure expansion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DSIP, a diffusion-model-based multi-agent motion planning framework for signal-free intersections that replaces discrete phase-based control with continuous trajectory optimization. It evaluates the theoretical upper-bound performance of this approach under idealized communication and execution conditions in SUMO simulations across diverse four-leg intersections, claiming significant reductions in average delay and higher average speeds relative to fixed-time signal control and state-of-the-art RL-based controllers, especially in medium- to high-density traffic.
Significance. If the empirical claims are substantiated with detailed quantitative results and validation procedures, the work could establish a useful theoretical benchmark for diffusion-driven coordination in autonomous intersection management. The explicit scoping to idealized conditions to isolate core benefits is a constructive framing that allows clear comparison to baselines without overclaiming real-world applicability.
major comments (1)
- [Abstract] Abstract: The central claim that 'DSIP significantly reduces average delay and maintains higher average speed' is presented without any quantitative metrics, tables, figures, training details, or validation procedures in the provided manuscript text. This absence makes the empirical comparison to fixed-time and RL baselines unevaluable and load-bearing for the paper's contribution.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback, which highlights an important opportunity to strengthen the presentation of our empirical results. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'DSIP significantly reduces average delay and maintains higher average speed' is presented without any quantitative metrics, tables, figures, training details, or validation procedures in the provided manuscript text. This absence makes the empirical comparison to fixed-time and RL baselines unevaluable and load-bearing for the paper's contribution.
Authors: We agree that the abstract would be more informative and evaluable if it included key quantitative metrics. The main body of the manuscript already contains the full set of results, including tables and figures with average delay reductions, speed improvements, and comparisons to fixed-time signals and RL baselines across traffic densities, along with details on the SUMO simulation setup, idealized conditions, and validation procedures. To address the referee's point, we will revise the abstract to incorporate specific quantitative highlights (e.g., percentage reductions in average delay and speed gains in medium- to high-density scenarios) while preserving brevity. This change will make the central claims immediately assessable without altering the paper's scope or idealized framing. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper presents DSIP as a diffusion-model-based multi-agent planner and evaluates its performance empirically via SUMO simulations under explicitly idealized communication and execution conditions. The central claims consist of direct comparisons of average delay and speed against fixed-time and RL baselines; no equations, fitted parameters, or self-citations are shown that would reduce these metrics to inputs by construction or import uniqueness via author prior work. The derivation chain is therefore self-contained as an empirical demonstration rather than a closed definitional loop.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Development of VT- Micro model for estimating hot stabilized light duty vehicle and truck emissions,
H. Rakha, K. Ahn, and A. Trani, “Development of VT- Micro model for estimating hot stabilized light duty vehicle and truck emissions,” Transportation Research Part D: Transport and Environment , vol. 9, no. 1, pp. 49–74, Jan. 2004
2004
-
[2]
Real-world fuel consumption and CO2 (carbon dioxide) emissions by driving conditions for light-duty passenger vehicles in China,
S. Zhang, Y . Wu, H. Liu, R. Huang, P . Un, Y . Zhou, L. Fu, and J. Hao, “Real-world fuel consumption and CO2 (carbon dioxide) emissions by driving conditions for light-duty passenger vehicles in China,” Energy, vol. 69, pp. 247–257, May 2014
2014
-
[3]
Energy con- sumption of electric vehicles based on real-world driving patterns: A case study of Beijing,
H. Wang, X. Zhang, and M. Ouyang, “Energy con- sumption of electric vehicles based on real-world driving patterns: A case study of Beijing,” Applied Energy , vol. 157, pp. 710–719, Nov. 2015
2015
-
[4]
Prediction-Based Eco-Approach and Depar- ture at Signalized Intersections With Speed Forecasting on Preceding V ehicles,
F. Y e, P . Hao, X. Qi, G. Wu, K. Boriboonsomsin, and M. J. Barth, “Prediction-Based Eco-Approach and Depar- ture at Signalized Intersections With Speed Forecasting on Preceding V ehicles,”IEEE Transactions on Intelligent Transportation Systems , vol. 20, no. 4, pp. 1378–1389, Apr. 2019
2019
-
[5]
Traffic signal settings,
F. V . Webster, “Traffic signal settings,” Road Research Laboratory, London, U.K., Road Research Technical Paper 39, 1958, her Majesty’s Stationery Office
1958
-
[6]
5-A Survey on Reinforcement Learning Models and Algorithms for Traffic Signal Control,
K.-L. A. Y au, J. Qadir, H. L. Khoo, M. H. Ling, and P . Komisarczuk, “5-A Survey on Reinforcement Learning Models and Algorithms for Traffic Signal Control,” ACM Comput. Surv., vol. 50, no. 3, pp. 34:1–34:38, Jun. 2017
2017
-
[7]
IntelliLight: A Reinforcement Learning Approach for Intelligent Traffic Light Control,
H. Wei, G. Zheng, H. Y ao, and Z. Li, “IntelliLight: A Reinforcement Learning Approach for Intelligent Traffic Light Control,” in Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining , ser. KDD ’18. New Y ork, NY , USA: Association for Computing Machinery, Jul. 2018, pp. 2496–2505
2018
-
[8]
Cooperative Deep Reinforcement Learning for Large- Scale Traffic Grid Signal Control,
T. Tan, F. Bao, Y . Deng, A. Jin, Q. Dai, and J. Wang, “Cooperative Deep Reinforcement Learning for Large- Scale Traffic Grid Signal Control,” IEEE Transactions on Cybernetics, vol. 50, no. 6, pp. 2687–2700, Jun. 2020
2020
-
[9]
Control of con- nected and automated vehicles: State of the art and future challenges,
J. Guanetti, Y . Kim, and F. Borrelli, “Control of con- nected and automated vehicles: State of the art and future challenges,” Annual Reviews in Control , vol. 45, pp. 18– 40, 2018
2018
-
[10]
A Survey of Security and Privacy Issues in V2X Communication Systems,
T. Y oshizawa, D. Singelée, J. T. Muehlberg, S. Delbruel, A. Taherkordi, D. Hughes, and B. Preneel, “A Survey of Security and Privacy Issues in V2X Communication Systems,” ACM Comput. Surv., vol. 55, no. 9, pp. 185:1– JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 12 185:36, Jan. 2023
2021
-
[11]
10-A Virtual Spring Strategy for Cooperative Control of Connected and Automated V ehicles at Signal- Free Intersections,
J. Gong, Y . Zhao, J. Cao, J. Guo, M. Abdel-Aty, and W. Huang, “10-A Virtual Spring Strategy for Cooperative Control of Connected and Automated V ehicles at Signal- Free Intersections,” IEEE Transactions on Intelligent Transportation Systems , vol. 25, no. 2, pp. 1430–1444, Feb. 2024
2024
-
[12]
A vehicle-intersection coordination scheme for smooth flows of traffic without using traffic lights,
M. A. S. Kamal, J.-i. Imura, T. Hayakawa, A. Ohata, and K. Aihara, “A vehicle-intersection coordination scheme for smooth flows of traffic without using traffic lights,” IEEE Transactions on Intelligent Transportation Systems, vol. 16, no. 3, pp. 1136–1147, 2015
2015
-
[13]
A decentralized energy-optimal control framework for connected automated vehicles at signal-free intersec- tions,
A. A. Malikopoulos, C. G. Cassandras, and Y . J. Zhang, “A decentralized energy-optimal control framework for connected automated vehicles at signal-free intersec- tions,” Automatica, vol. 93, pp. 244–256, 2018
2018
-
[14]
Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment,
J. Lee and B. Park, “Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment,” IEEE transactions on intelligent transportation systems , vol. 13, no. 1, pp. 81–90, 2012
2012
-
[15]
Distributed conflict-free cooperation for mul- tiple connected vehicles at unsignalized intersections,
B. Xu, S. E. Li, Y . Bian, S. Li, X. J. Ban, J. Wang, and K. Li, “Distributed conflict-free cooperation for mul- tiple connected vehicles at unsignalized intersections,” Transportation research part C: emerging technologies , vol. 93, pp. 322–334, 2018
2018
-
[16]
SUMO – Simulation of Urban MObility,
M. Behrisch, L. Bieker, J. Erdmann, and D. Krajzewicz, “SUMO – Simulation of Urban MObility,” SIMUL 2011 : The Third International Conference on Advances in System Simulation , 2011
2011
-
[17]
Scoot-a traffic responsive method of coordinating sig- nals,
P . Hunt, D. Robertson, R. Bretherton, and R. Winton, “Scoot-a traffic responsive method of coordinating sig- nals,” Transport and Road Research Laboratory (TRRL), Tech. Rep., 1981
1981
-
[18]
The Sydney coordinated adaptive traffic (SCA T) system philosophy and benefits,
A. Sims and K. Dobinson, “The Sydney coordinated adaptive traffic (SCA T) system philosophy and benefits,” IEEE Transactions on V ehicular Technology , vol. 29, no. 2, pp. 130–137, May 1980
1980
-
[19]
Transyt: a traffic network study tool,
D. I. Robertson, “Transyt: a traffic network study tool,” Road Research Laboratory /UK, Tech. Rep., 1969
1969
-
[20]
Group-based optimisation of signal timings using the TRANSYT traffic model,
S. Wong, “Group-based optimisation of signal timings using the TRANSYT traffic model,” Transportation Re- search Part B: Methodological , vol. 30, no. 3, pp. 217– 244, Jun. 1996
1996
-
[21]
The prodyn real time traffic algorithm,
J.-J. Henry, J. L. Farges, and J. Tuffal, “The prodyn real time traffic algorithm,” in Control in transportation systems. Elsevier, 1984, pp. 305–310
1984
-
[22]
Coordinated deep reinforcement learners for traffic light control,
E. V an der Pol and F. A. Oliehoek, “Coordinated deep reinforcement learners for traffic light control,” Proceed- ings of learning, inference and control of multi-agent systems (at NIPS 2016) , vol. 8, pp. 21–38, 2016
2016
-
[23]
Traffic signal control with deep reinforcement learning,
T. Zhao, P . Wang, and S. Li, “Traffic signal control with deep reinforcement learning,” in 2019 International Conference on Intelligent Computing, Automation and Systems (ICICAS) . IEEE, 2019, pp. 763–767
2019
-
[24]
Toward a thousand lights: Decentral- ized deep reinforcement learning for large-scale traffic signal control,
C. Chen, H. Wei, N. Xu, G. Zheng, M. Y ang, Y . Xiong, K. Xu, and Z. Li, “Toward a thousand lights: Decentral- ized deep reinforcement learning for large-scale traffic signal control,” in Proceedings of the AAAI conference on artificial intelligence , vol. 34, no. 04, 2020, pp. 3414– 3421
2020
-
[25]
Colight: Learning network-level cooperation for traffic signal control,
H. Wei, N. Xu, H. Zhang, G. Zheng, X. Zang, C. Chen, W. Zhang, Y . Zhu, K. Xu, and Z. Li, “Colight: Learning network-level cooperation for traffic signal control,” in Proceedings of the 28th ACM International Conference on Information and Knowledge Management , ser. CIKM ’19, 2019
2019
-
[26]
Leveraging queue length and attention mechanisms for enhanced traffic signal control optimization,
L. Zhang, S. Xie, and J. Deng, “Leveraging queue length and attention mechanisms for enhanced traffic signal control optimization,” in Joint European Confer- ence on Machine Learning and Knowledge Discovery in Databases. Springer, 2023, pp. 141–156
2023
-
[27]
A Formal Basis for the Heuristic Determination of Minimum Cost Paths,
P . E. Hart, N. J. Nilsson, and B. Raphael, “A Formal Basis for the Heuristic Determination of Minimum Cost Paths,” IEEE Transactions on Systems Science and Cy- bernetics, vol. 4, no. 2, pp. 100–107, Jul. 1968
1968
-
[28]
D* lite,
S. Koenig and M. Likhachev, “D* lite,” in Eighteenth national conference on Artificial intelligence , 2002, pp. 476–483
2002
-
[29]
Probabilistic roadmaps for path planning in high- dimensional configuration spaces,
L. Kavraki, P . Svestka, J.-C. Latombe, and M. Over- mars, “Probabilistic roadmaps for path planning in high- dimensional configuration spaces,” IEEE Transactions on Robotics and Automation , vol. 12, no. 4, pp. 566–580, Aug. 1996
1996
-
[30]
Rapidly-exploring random trees: A new tool for path planning,
S. LaV alle, “Rapidly-exploring random trees: A new tool for path planning,” Research Report 9811 , 1998
1998
-
[31]
Sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,” The international journal of robotics research , vol. 30, no. 7, pp. 846–894, 2011
2011
-
[32]
Multi-agent pathfinding: Definitions, variants, and benchmarks,
R. Stern, N. Sturtevant, A. Felner, S. Koenig, H. Ma, T. Walker, J. Li, D. Atzmon, L. Cohen, T. Kumar et al. , “Multi-agent pathfinding: Definitions, variants, and benchmarks,” in Proceedings of the International Symposium on Combinatorial Search , vol. 10, no. 1, 2019, pp. 151–158
2019
-
[33]
Conflict-based search for optimal multi-agent pathfind- ing,
G. Sharon, R. Stern, A. Felner, and N. R. Sturtevant, “Conflict-based search for optimal multi-agent pathfind- ing,” Artificial Intelligence , vol. 219, pp. 40–66, Feb. 2015
2015
-
[34]
AL VINN: An Autonomous Land V ehicle in a Neural Network,
D. A. Pomerleau, “AL VINN: An Autonomous Land V ehicle in a Neural Network,” in Advances in Neu- ral Information Processing Systems , vol. 1. Morgan- Kaufmann, 1988
1988
-
[35]
Apprenticeship learning via inverse reinforcement learning,
P . Abbeel and A. Y . Ng, “Apprenticeship learning via inverse reinforcement learning,” in Proceedings of the twenty-first international conference on Machine learn- ing, 2004, p. 1
2004
-
[36]
Generative Adversarial Imitation Learning,
J. Ho and S. Ermon, “Generative Adversarial Imitation Learning,” in Advances in Neural Information Processing Systems, vol. 29. Curran Associates, Inc., 2016
2016
-
[37]
Motion Planning Diffusion: Learning and Planning of Robot Motions with Diffusion Models,
J. Carvalho, A. T. Le, M. Baierl, D. Koert, and J. Pe- ters, “Motion Planning Diffusion: Learning and Planning of Robot Motions with Diffusion Models,” in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , Oct. 2023, pp. 1916–1923
2023
-
[38]
MotionDiffuser: Controllable Multi-Agent Motion Prediction Using Diffusion,
C. M. Jiang, A. Cornman, C. Park, B. Sapp, Y . Zhou, and JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 13 D. Anguelov, “MotionDiffuser: Controllable Multi-Agent Motion Prediction Using Diffusion,” in 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). V ancouver, BC, Canada: IEEE, Jun. 2023, pp. 9644–9653
2021
-
[39]
Diffusion policy: Visuo- motor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burch- fiel, R. Tedrake, and S. Song, “Diffusion policy: Visuo- motor policy learning via action diffusion,” The Interna- tional Journal of Robotics Research , vol. 44, no. 10-11, pp. 1684–1704, 2025
2025
-
[40]
Primal: Pathfinding via reinforcement and imitation multi-agent learning,
G. Sartoretti, J. Kerr, Y . Shi, G. Wagner, T. S. Kumar, S. Koenig, and H. Choset, “Primal: Pathfinding via reinforcement and imitation multi-agent learning,” IEEE Robotics and Automation Letters , vol. 4, no. 3, pp. 2378– 2385, 2019
2019
-
[41]
Multi-robot motion planning with diffusion models,
Y . Shaoul, I. Mishani, S. V ats, J. Li, and M. Likhachev, “Multi-robot motion planning with diffusion models,” in The Thirteenth International Conference on Learning Representations, 2025
2025
-
[42]
Highway capacity manual 2010,
M. R. Morris, J. B. Barker, A. D. Biehler, P . H. Appel, and R. M. Brewster, “Highway capacity manual 2010,” Transportation Research Board, Tech. Rep., 2010
2010
-
[43]
Reg- ulations for the implementation of the road traffic safety law of the people’s republic of china,
State Council of the People’s Republic of China, “Reg- ulations for the implementation of the road traffic safety law of the people’s republic of china,” Beijing, China, 2004, article 45, effective since May 1, 2004
2004
-
[44]
GB 51 286-2018, 2018
Code for Design of Urban Road Engineering , Ministry of Housing and Urban-Rural Development of the People’s Republic of China Std. GB 51 286-2018, 2018
2018
-
[45]
SUMO’s Lane-Changing Model,
J. Erdmann, “SUMO’s Lane-Changing Model,” in Mod- eling Mobility with Open Data , M. Behrisch and M. We- ber, Eds. Cham: Springer International Publishing, 2015, pp. 105–123
2015
-
[46]
PlainXML - SUMO Documentation,
SUMO, “PlainXML - SUMO Documentation,” https://sumo.dlr.de/docs/Networks/PlainXML.html
-
[47]
Multiagent traffic management: A reservation-based intersection control mechanism,
K. Dresner and P . Stone, “Multiagent traffic management: A reservation-based intersection control mechanism,” in Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems-V olume 2, 2004, pp. 530–537. Qian Hu is a sophomore at the Global Institute of Future Technology (GIFT), Shanghai Jiao Tong University, Shangha...
2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.