Learning Embedding of 3D models with Quadric Loss
Pith reviewed 2026-05-24 17:11 UTC · model grok-4.3
The pith
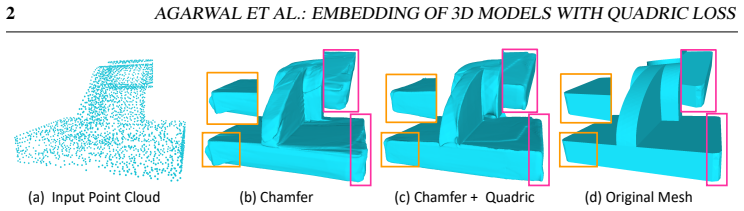
Quadric loss combined with Chamfer loss improves reconstruction of sharp features over either loss alone or other point-surface alternatives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that quadric loss, which minimizes the quadric error between the reconstructed points and the input surface using precomputed local quadric matrices, when combined with Chamfer loss, achieves better reconstruction results as compared to any one of them or other point-surface loss functions.
What carries the argument
Quadric loss: a differentiable point-surface loss computed from precomputed local quadric matrices that measures quadric error to the input surface.
If this is right
- Reconstructed 3D models preserve edges and corners more accurately than with Chamfer loss alone.
- Training remains efficient because quadric matrices are computed once before optimization.
- The loss works with both point-based and mesh-based network architectures.
- Overall reconstruction quality exceeds that obtained from other point-surface loss functions.
Where Pith is reading between the lines
- The same precomputed quadric approach might be adapted to other geometric tasks such as surface denoising or registration.
- Performance could be tested on inputs with varying noise levels or missing regions to check robustness.
- The method might reduce the need for post-processing steps that restore sharp features in current pipelines.
Load-bearing premise
Minimizing quadric error on precomputed local quadrics will reliably improve perceptual quality of sharp features across diverse input surfaces and network architectures without introducing new artifacts.
What would settle it
An experiment on a test set of models with prominent edges and corners where the combined quadric-plus-Chamfer loss shows equal or worse edge-preservation metrics than Chamfer loss alone.
Figures




read the original abstract
Sharp features such as edges and corners play an important role in the perception of 3D models. In order to capture them better, we propose quadric loss, a point-surface loss function, which minimizes the quadric error between the reconstructed points and the input surface. Computation of Quadric loss is easy, efficient since the quadric matrices can be computed apriori, and is fully differentiable, making quadric loss suitable for training point and mesh based architectures. Through extensive experiments we show the merits and demerits of quadric loss. When combined with Chamfer loss, quadric loss achieves better reconstruction results as compared to any one of them or other point-surface loss functions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes quadric loss, a differentiable point-surface loss for 3D reconstruction networks that minimizes quadric error using precomputed 4x4 matrices Q_i for each input point. It is presented as easy to compute and suitable for point- and mesh-based architectures; when combined with Chamfer loss the authors claim it yields better reconstruction of sharp features than either loss alone or other point-surface losses, supported by extensive experiments.
Significance. If the empirical superiority holds under the stated conditions, quadric loss would supply a lightweight, precomputable regularizer that improves edge and corner fidelity without new parameters or heavy overhead. The precomputation of quadrics and full differentiability are concrete engineering strengths that could be adopted in existing pipelines.
major comments (2)
- [Section 3] Section 3: the quadric loss is defined directly as ∑ p^T Q_i p for reconstructed points p. The manuscript provides no analysis or bound on the approximation error incurred when p falls outside the local neighborhood used to fit Q_i; if this locality assumption is violated the combined loss can introduce new artifacts rather than sharpen features, directly undermining the central claim.
- [Experiments] Experiments (abstract and results sections): the headline assertion that quadric+Chamfer outperforms Chamfer alone or other point-surface losses is presented without reference to specific quantitative tables, ablation rows, metrics (e.g., Hausdorff, normal consistency on sharp edges), or error bars. This absence makes the superiority claim unverifiable from the given text and load-bearing for acceptance.
minor comments (2)
- [Abstract] Abstract: 'apriori' should be written as 'a priori'.
- [Section 3] Notation: the manuscript should explicitly state whether the same Q_i matrices are reused for all reconstructed points or whether nearest-neighbor assignment is performed at each iteration.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will incorporate revisions to strengthen the presentation and verifiability of our claims.
read point-by-point responses
-
Referee: [Section 3] Section 3: the quadric loss is defined directly as ∑ p^T Q_i p for reconstructed points p. The manuscript provides no analysis or bound on the approximation error incurred when p falls outside the local neighborhood used to fit Q_i; if this locality assumption is violated the combined loss can introduce new artifacts rather than sharpen features, directly undermining the central claim.
Authors: We agree that the manuscript would benefit from an explicit discussion of the locality assumption. In the revision we will add a paragraph to Section 3 deriving a simple error bound based on the quadratic form and the radius of the neighborhood used to compute each Q_i, together with a short argument that training dynamics keep reconstructed points sufficiently close to the surface for the bound to remain useful. This directly addresses the possibility of new artifacts. revision: yes
-
Referee: [Experiments] Experiments (abstract and results sections): the headline assertion that quadric+Chamfer outperforms Chamfer alone or other point-surface losses is presented without reference to specific quantitative tables, ablation rows, metrics (e.g., Hausdorff, normal consistency on sharp edges), or error bars. This absence makes the superiority claim unverifiable from the given text and load-bearing for acceptance.
Authors: We accept that the superiority claim requires explicit quantitative support. The revised manuscript will add a results table reporting Chamfer distance, Hausdorff distance, and normal consistency restricted to sharp edges, with rows for the combined loss, each loss alone, and the other point-surface baselines. Standard deviations across three independent training runs will be included as error bars, and the table will be referenced from both the abstract and the experimental section. revision: yes
Circularity Check
No circularity: quadric loss is a direct definition of a new point-surface term
full rationale
The paper defines quadric loss directly as the sum of p^T Q_i p over reconstructed points p, with Q_i precomputed once from input neighborhoods via the standard quadric-error formulation. This is an explicit new loss function, not obtained by fitting parameters to data and then relabeling the fit as a prediction, nor by any self-citation chain that would make the central claim equivalent to its own inputs. Effectiveness is asserted via empirical comparison with Chamfer loss and other baselines; no equation reduces the proposed loss to a fitted quantity or to a prior result by the same authors. The derivation chain is therefore self-contained and non-circular.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Quadric matrices can be computed a priori from the input surface
invented entities (1)
-
Quadric loss
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Learning representations and generative models for 3d point clouds
Panos Achlioptas, Olga Diamanti, Ioannis Mitliagkas, and Leonidas Guibas. Learning representations and generative models for 3d point clouds. In ICML, 2018
work page 2018
-
[2]
ShapeNet: An Information-Rich 3D Model Repository
Angel X. Chang, Thomas Funkhouser, Leonidas Guibas, Pat Hanrahan, Qixing Huang, Zimo Li, Silvio Savarese, Manolis Savva, Shuran Song, Hao Su, Jianxiong Xiao, Li Yi, and Fisher Yu. ShapeNet: An Information-Rich 3D Model Repository. Technical Re- port arXiv:1512.03012 [cs.GR], Stanford University — Princeton University — Toyota Technological Institute at Ch...
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[3]
Metro: Measuring error on simplified surfaces
Paolo Cignoni, Claudio Rocchini, and Roberto Scopigno. Metro: Measuring error on simplified surfaces. In Computer Graphics F orum, 1998
work page 1998
-
[4]
Scan2Mesh: From Unstructured Range Scans to 3D Meshes
Angela Dai and Matthias Nießner. Scan2mesh: From unstructured range scans to 3d meshes. arXiv preprint arXiv:1811.10464, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[5]
A point set generation network for 3d object reconstruction from a single image
Haoqiang Fan, Hao Su, and Leonidas Guibas. A point set generation network for 3d object reconstruction from a single image. In CVPR, 2017
work page 2017
-
[6]
Surface simplification using quadric error met- rics
Michael Garland and Paul S Heckbert. Surface simplification using quadric error met- rics. In SIGGRAPH, 1997
work page 1997
-
[7]
Learning a predictable and generative vector representation for objects
Rohit Girdhar, David F Fouhey, Mikel Rodriguez, and Abhinav Gupta. Learning a predictable and generative vector representation for objects. In ECCV, 2016
work page 2016
-
[8]
Shape correspondences from learnt template-based parametrization
Thibault Groueix, Matthew Fisher, Vladimir G Kim, Bryan C Russell, and Mathieu Aubry. Shape correspondences from learnt template-based parametrization. In ECCV, 2018
work page 2018
-
[9]
Atlasnet: A papier approach to learning 3d surface generation
Thibault Groueix, Matthew Fisher, Vladimir G Kim, Bryan C Russell, and Mathieu Aubry. Atlasnet: A papier approach to learning 3d surface generation. In CVPR, 2018
work page 2018
-
[10]
Poisson surface reconstruc- tion
Michael Kazhdan, Matthew Bolitho, and Hugues Hoppe. Poisson surface reconstruc- tion. In SGP, 2006
work page 2006
-
[11]
Adam: A Method for Stochastic Optimization
Diederik P Kingma and Jimmy Ba. Adam: A method for stochastic optimization. arXiv preprint arXiv:1412.6980, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[12]
Abc: A big cad model dataset for geometric deep learning
Sebastian Koch, Albert Matveev, Zhongshi Jiang, Francis Williams, Alexey Artemov, Evgeny Burnaev, Marc Alexa, Denis Zorin, and Daniele Panozzo. Abc: A big cad model dataset for geometric deep learning. In CVPR, 2019
work page 2019
-
[13]
Grass: Generative recursive autoencoders for shape structures
Jun Li, Kai Xu, Siddhartha Chaudhuri, Ersin Yumer, Hao Zhang, and Leonidas Guibas. Grass: Generative recursive autoencoders for shape structures. ACM Transactions on Graphics (TOG), 2017
work page 2017
-
[14]
Joint embeddings of shapes and images via cnn image purifica- tion
Yangyan Li, Hao Su, Charles Ruizhongtai Qi, Noa Fish, Daniel Cohen-Or, and Leonidas J Guibas. Joint embeddings of shapes and images via cnn image purifica- tion. ACM Transactions on Graphics (TOG), 2015
work page 2015
-
[15]
Deformable shape completion with graph convolutional autoencoders
Or Litany, Alex Bronstein, Michael Bronstein, and Ameesh Makadia. Deformable shape completion with graph convolutional autoencoders. In CVPR, 2018. AGARW AL ET AL.: EMBEDDING OF 3D MODELS WITH QUADRIC LOSS 11
work page 2018
-
[16]
The shape variational autoencoder: A deep gen- erative model of part-segmented 3d objects
Charlie Nash and Chris KI Williams. The shape variational autoencoder: A deep gen- erative model of part-segmented 3d objects. Computer Graphics F orum, 2017
work page 2017
-
[17]
Pointnet: Deep learning on point sets for 3d classification and segmentation
Charles R Qi, Hao Su, Kaichun Mo, and Leonidas J Guibas. Pointnet: Deep learning on point sets for 3d classification and segmentation. In CVPR, 2017
work page 2017
-
[18]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space
Charles Ruizhongtai Qi, Li Yi, Hao Su, and Leonidas J Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In NeurIPS, 2017
work page 2017
-
[19]
Generating 3d faces using convolutional mesh autoencoders
Anurag Ranjan, Timo Bolkart, Soubhik Sanyal, and Michael J Black. Generating 3d faces using convolutional mesh autoencoders. In ECCV, 2018
work page 2018
-
[20]
Full-range approximation of triangulated polyhe- dra
Rémi Ronfard and Jarek Rossignac. Full-range approximation of triangulated polyhe- dra. Computer Graphics F orum, 1996
work page 1996
-
[21]
Multi- view convolutional neural networks for 3d shape recognition
Hang Su, Subhransu Maji, Evangelos Kalogerakis, and Erik Learned-Miller. Multi- view convolutional neural networks for 3d shape recognition. In ICCV, 2015
work page 2015
-
[22]
Mesh-based autoen- coders for localized deformation component analysis
Qingyang Tan, Lin Gao, Yu-Kun Lai, Jie Yang, and Shihong Xia. Mesh-based autoen- coders for localized deformation component analysis. In AAAI, 2018
work page 2018
-
[23]
Pixel2mesh: Generating 3d mesh models from single rgb images
Nanyang Wang, Yinda Zhang, Zhuwen Li, Yanwei Fu, Wei Liu, and Yu-Gang Jiang. Pixel2mesh: Generating 3d mesh models from single rgb images. In ECCV, 2018
work page 2018
-
[24]
Dynamic Graph CNN for Learning on Point Clouds
Yue Wang, Yongbin Sun, Ziwei Liu, Sanjay E Sarma, Michael M Bronstein, and Justin M Solomon. Dynamic graph cnn for learning on point clouds. arXiv preprint arXiv:1801.07829, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[25]
Learn- ing a probabilistic latent space of object shapes via 3d generative-adversarial modeling
Jiajun Wu, Chengkai Zhang, Tianfan Xue, Bill Freeman, and Josh Tenenbaum. Learn- ing a probabilistic latent space of object shapes via 3d generative-adversarial modeling. In NeurIPS, 2016
work page 2016
-
[26]
Structure-aware generative network for 3d-shape modeling
Zhijie Wu, Xiang Wang, Di Lin, Dani Lischinski, Daniel Cohen-Or, and Hui Huang. Structure-aware generative network for 3d-shape modeling. arXiv preprint arXiv:1808.03981, 2018
-
[27]
3d shapenets: A deep representation for volumetric shapes
Zhirong Wu, Shuran Song, Aditya Khosla, Fisher Yu, Linguang Zhang, Xiaoou Tang, and Jianxiong Xiao. 3d shapenets: A deep representation for volumetric shapes. In CVPR, 2015
work page 2015
-
[28]
Foldingnet: Point cloud auto- encoder via deep grid deformation
Yaoqing Yang, Chen Feng, Yiru Shen, and Dong Tian. Foldingnet: Point cloud auto- encoder via deep grid deformation. In CVPR, 2018
work page 2018
-
[29]
Ec-net: an edge-aware point set consolidation network
Lequan Yu, Xianzhi Li, Chi-Wing Fu, Daniel Cohen-Or, and Pheng-Ann Heng. Ec-net: an edge-aware point set consolidation network. In ECCV, 2018
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.