DeformX: A Versatile Co-Simulation Framework for Deformable Linear Objects
Pith reviewed 2026-06-26 11:52 UTC · model grok-4.3
The pith
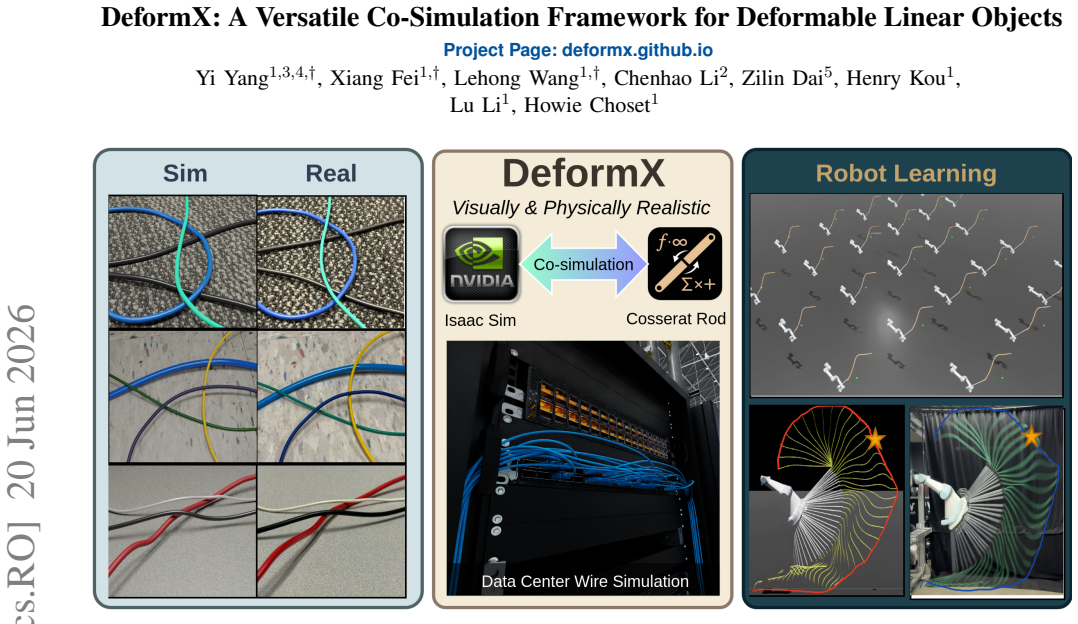
DeformX combines a Cosserat rod physics engine with visual rendering to simulate deformable linear objects with both mechanical accuracy and visual fidelity for robotic tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
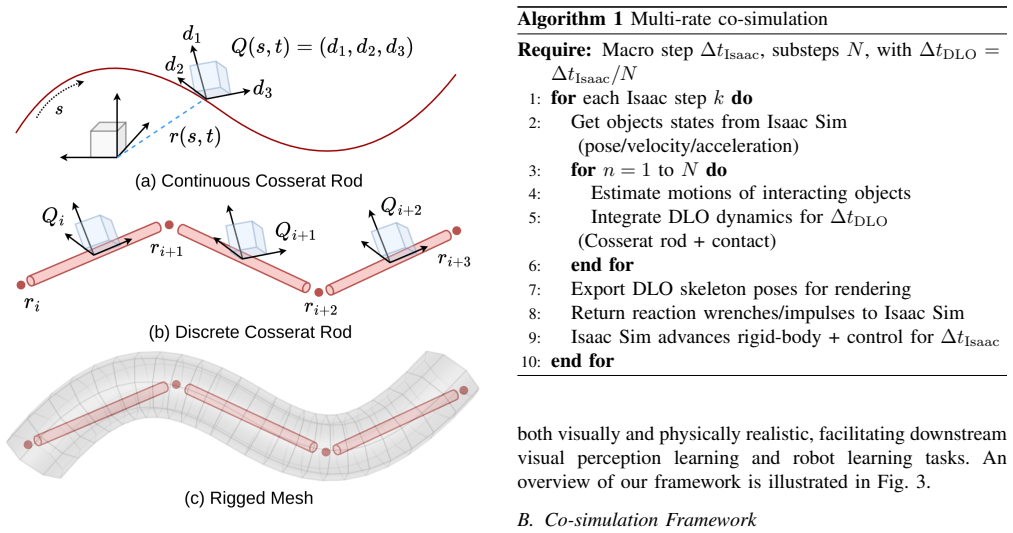
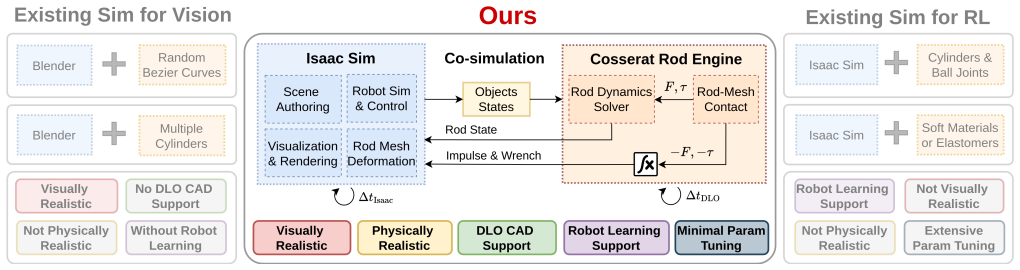
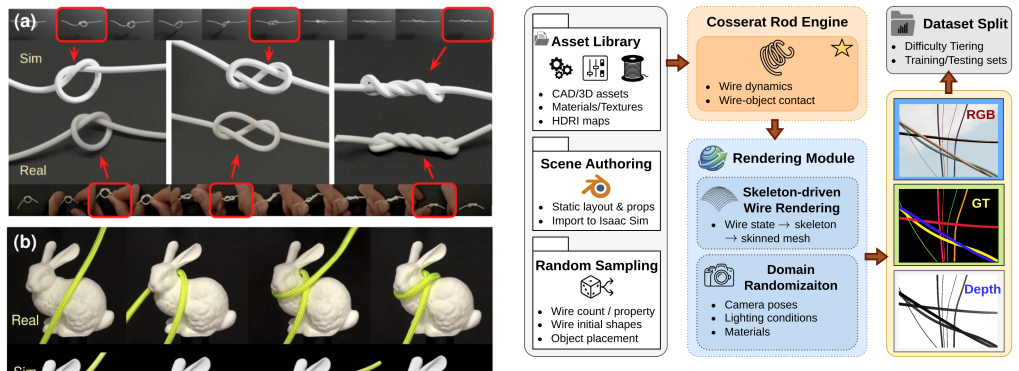
DeformX integrates a dedicated Cosserat rod physics engine with visual simulation capabilities to enable DLO simulations that are both physically faithful and visually realistic, where the engine simulates dynamics and self-collisions plus contacts with free-form meshes and mesh skinning maps discrete rod deformations onto CAD models, providing one of the first frameworks that unifies realistic visualization, principled physics, and compatibility with robot learning pipelines.
What carries the argument
The Cosserat rod engine that computes dynamics, self-collisions, and contacts with arbitrary free-form meshes, paired with mesh skinning to map rod states onto visual CAD models.
If this is right
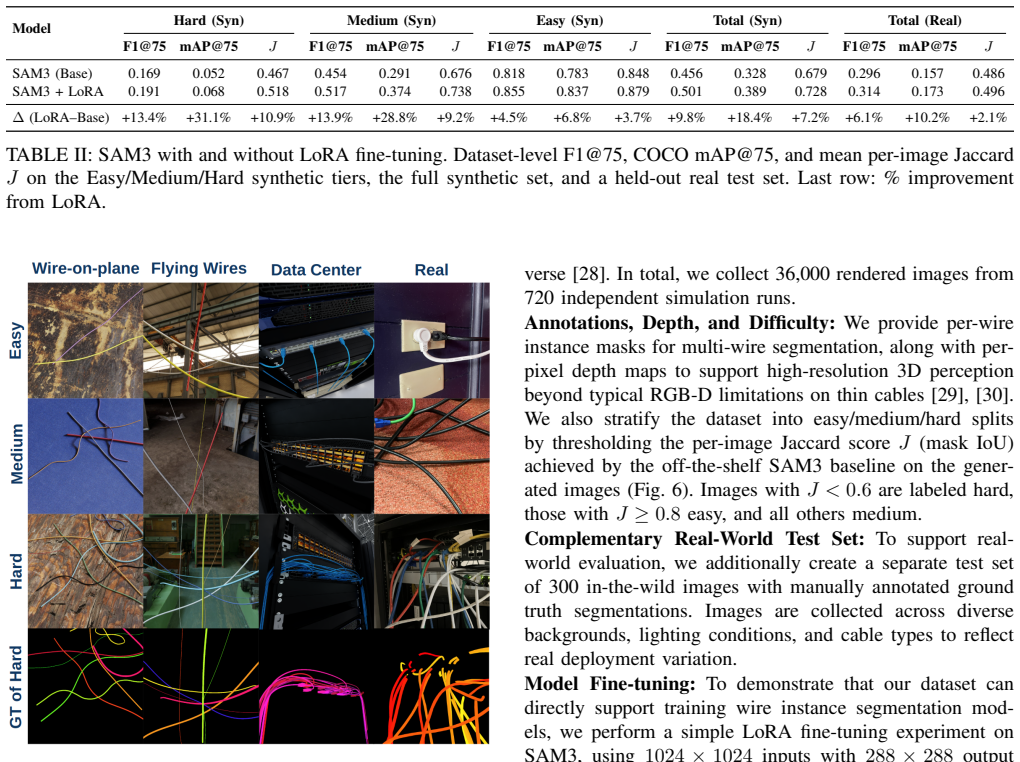
- Synthetic data produced by the framework improves fine-tuning performance of image segmentation models on real photographs by 10.2 percent mAP@75.
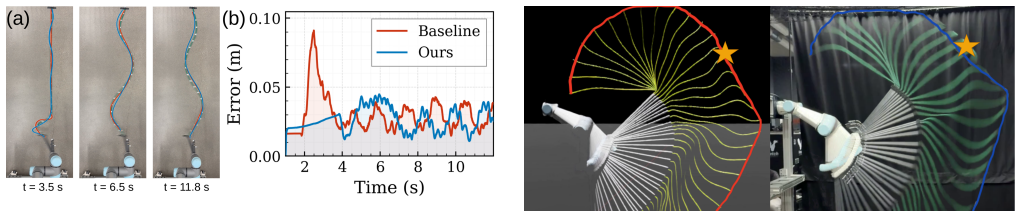
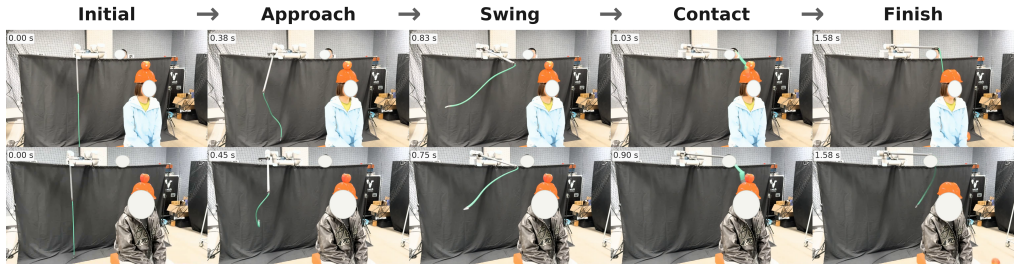
- Control policies trained entirely inside the simulation transfer to physical robot hardware with a mean target-hitting error of 6.6 cm.
- The framework supports simulation of DLO interactions with arbitrary free-form meshes while maintaining both physical and visual consistency.
Where Pith is reading between the lines
- The same engine-plus-skinning structure could be applied to other slender-object tasks such as knotting or cable routing without changing the core simulation loop.
- If the rod engine runs at interactive rates, the framework could support online replanning loops that close the loop between perception and action on physical hardware.
- Extending the contact model to include friction parameters derived from material measurements would allow direct comparison of simulated versus measured sliding behavior.
Load-bearing premise
The dedicated Cosserat rod model accurately captures the real-world bending, twisting, shear, and collision behaviors of slender elastic objects without significant inaccuracies.
What would settle it
Side-by-side measurements of a physical DLO's deformed shape and contact forces under controlled loads compared against the corresponding simulated outputs.
Figures
read the original abstract
Deformable linear objects (DLOs) such as wires, cables, and ropes are common in robotic manipulation tasks, yet simulating them with both visual realism and physical accuracy remains challenging. Existing visual simulation methods typically rely on procedural geometric primitives that lack physically grounded deformation behavior, while physics-based approaches with robot learning support often approximate DLOs as rigid-link chains or generic soft bodies, failing to accurately capture the bending, twisting, and shear mechanics of slender elastic structures. In this work, we introduce DeformX, a co-simulation framework that integrates a dedicated Cosserat rod physics engine with NVIDIA Isaac Sim, enabling DLO simulations that are both physically faithful and visually realistic. Our Cosserat rod engine simulates the dynamics and self-collisions of DLOs, and contact interactions with arbitrary free-form meshes. To achieve high-fidelity visualization, we employ mesh skinning to map discrete rod deformations onto imported CAD models. To the best of our knowledge, DeformX is the one of the first frameworks for DLO simulation that unifies realistic visualization, principled physics, and compatibility with robot learning pipelines. We demonstrate its versatility across synthetic data generation and policy learning for DLO manipulation, and validate visual and physical fidelity through comparisons against real-world experiments. Notably, fine-tuning Segment Anything Model 3 (SAM3) on DeformX-generated data yields a 10.2% mAP@75 improvement in real-image wire segmentation, and a rope-swinging policy trained entirely in DeformX achieves a mean target-hitting error of 6.6 cm on a UR5e manipulator in real-world trials, highlighting its strong sim-to-real transfer capability.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces DeformX, a co-simulation framework that integrates a dedicated Cosserat rod physics engine with NVIDIA Isaac Sim for deformable linear objects (DLOs). The engine handles dynamics, self-collisions, and contacts with arbitrary free-form meshes; mesh skinning maps rod deformations to imported CAD models for visualization. The work positions DeformX as one of the first frameworks unifying realistic visualization, principled physics, and robot learning pipeline compatibility. It demonstrates utility via synthetic data generation for SAM3 fine-tuning (10.2% mAP@75 gain on real wire segmentation) and end-to-end policy learning for rope swinging (6.6 cm mean target-hitting error on a real UR5e after sim-only training), with direct real-world validation experiments.
Significance. If the reported physical and visual fidelity claims hold, the framework addresses a recognized gap in DLO simulation by combining Cosserat-rod mechanics with high-fidelity rendering and learning compatibility inside a widely used robotics simulator. The concrete sim-to-real metrics (segmentation improvement and policy transfer error) provide falsifiable evidence of utility for manipulation tasks. The explicit implementation details and real-world comparison experiments strengthen the unification argument beyond prior approximations that treat DLOs as rigid chains or generic soft bodies.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and recommendation to accept. The report accurately captures the contributions of DeformX in integrating Cosserat-rod physics with Isaac Sim for DLOs, along with the reported sim-to-real results on segmentation and policy transfer.
Circularity Check
No significant circularity; framework integrates external components with external validation
full rationale
The manuscript describes DeformX as a co-simulation integration of a pre-existing Cosserat rod engine, NVIDIA Isaac Sim, and standard mesh skinning, with no equations, derivations, or fitted parameters presented. Claims of unification and sim-to-real performance rest on implementation details plus direct real-world comparisons (SAM3 mAP improvement, 6.6 cm policy error), not on any self-referential definitions, self-citation chains, or renaming of known results. The 'to the best of our knowledge' novelty statement is non-load-bearing and does not invoke prior author work as a uniqueness theorem. No load-bearing step reduces to its own inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
J. Sanchez, J.-A. Corrales, B.-C. Bouzgarrou, and Y . Mezouar, “Robotic manipulation and sensing of deformable objects in domestic and industrial applications: a survey,”The International Journal of Robotics Research, vol. 37, no. 7, pp. 688–716, 2018. [Online]. Available: https://doi.org/10.1177/0278364918779698
-
[2]
Handloom: Learned tracing of one-dimensional objects for inspection and manipulation,
V . Viswanath, K. Shivakumar, M. Parulekar, J. Ajmera, J. Kerr, J. Ichnowski, R. Cheng, T. Kollar, and K. Goldberg, “Handloom: Learned tracing of one-dimensional objects for inspection and manipulation,” inProceedings of The 7th Conference on Robot Learning, ser. Proceedings of Machine Learning Research, J. Tan, M. Toussaint, and K. Darvish, Eds., vol. 22...
2023
-
[3]
Generation of realistic synthetic cable images to train deep learning segmentation models,
P. MalvidoFresnillo, W. M. Mohammed, S. Vasudevan, J. A. PerezGarcia, and J. L. MartinezLastra, “Generation of realistic synthetic cable images to train deep learning segmentation models,” Machine Vision and Applications, vol. 35, no. 4, p. 84, Jun 2024. [Online]. Available: https://doi.org/10.1007/s00138-024-01562-y
-
[4]
Fastdlo: Fast deformable linear objects instance segmentation,
A. Caporali, K. Galassi, R. Zanella, and G. Palli, “Fastdlo: Fast deformable linear objects instance segmentation,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9075–9082, 2022
2022
-
[5]
Auto-generated wires dataset for semantic segmentation with domain-independence,
R. Zanella, A. Caporali, K. Tadaka, D. D. Gregorio, and G. Palli, “Auto-generated wires dataset for semantic segmentation with domain-independence,”2021 International Conference on Computer, Control and Robotics (ICCCR), pp. 292–298, 2021. [Online]. Available: https://api.semanticscholar.org/CorpusID:231915434
2021
-
[6]
Iscute: Instance segmentation of cables using text embedding,
S. Kozlovsky, O. Joglekar, and D. D. Castro, “Iscute: Instance segmentation of cables using text embedding,” 2024. [Online]. Available: https://arxiv.org/abs/2402.11996
arXiv 2024
-
[7]
Dexdlo: Learning goal- conditioned dexterous policy for dynamic manipulation of deformable linear objects,
S. Zhaole, J. Zhu, and R. B. Fisher, “Dexdlo: Learning goal- conditioned dexterous policy for dynamic manipulation of deformable linear objects,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 16 009–16 015
2024
-
[8]
Iterative residual policy: for goal-conditioned dynamic manipulation of deformable objects,
C. Chi, B. Burchfiel, E. Cousineau, S. Feng, and S. Song, “Iterative residual policy: for goal-conditioned dynamic manipulation of deformable objects,” 2022. [Online]. Available: https://arxiv.org/ abs/2203.00663
arXiv 2022
-
[9]
Real2sim2real: Self-supervised learning of physical single-step dynamic actions for planar robot casting,
V . Lim, H. Huang, L. Y . Chen, J. Wang, J. Ichnowski, D. Seita, M. Laskey, and K. Goldberg, “Real2sim2real: Self-supervised learning of physical single-step dynamic actions for planar robot casting,” in 2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 8282–8289
2022
-
[10]
Flexible sim- ulation of deformable models using discontinuous galerkin fem,
P. Kaufmann, S. Martin, M. Botsch, and M. Gross, “Flexible sim- ulation of deformable models using discontinuous galerkin fem,” Graphical Models, vol. 71, no. 4, pp. 153–167, 2009
2009
-
[11]
An efficient fe model of slender members for crash analysis of cable barriers,
Q. Wang, H. Fang, N. Li, D. C. Weggel, and G. Wen, “An efficient fe model of slender members for crash analysis of cable barriers,” Engineering structures, vol. 52, pp. 240–256, 2013
2013
-
[12]
Physically based real-time interactive assembly simulation of cable harness,
N. Lv, J. Liu, X. Ding, J. Liu, H. Lin, and J. Ma, “Physically based real-time interactive assembly simulation of cable harness,”Journal of Manufacturing Systems, vol. 43, pp. 385–399, 2017
2017
-
[13]
Modeling elastic beams using dynamic splines,
P. P. Valentini and E. Pennestr `ı, “Modeling elastic beams using dynamic splines,”Multibody system dynamics, vol. 25, no. 3, pp. 271– 284, 2011
2011
-
[14]
Nonlinear dynamics of elastic rods using the cosserat theory: Modelling and simulation,
D. Cao and R. W. Tucker, “Nonlinear dynamics of elastic rods using the cosserat theory: Modelling and simulation,”International Journal of Solids and Structures, vol. 45, no. 2, pp. 460–477, 2008. [Online]. Available: https://www.sciencedirect.com/science/article/pii/ S0020768307003253
2008
-
[15]
Discrete cosserat rod models based on the difference geometry of framed curves for interactive simulation of flexible cables,
J. Linn and K. Dreßler, “Discrete cosserat rod models based on the difference geometry of framed curves for interactive simulation of flexible cables,” inMath for the Digital Factory. Springer, 2017, pp. 289–319
2017
-
[16]
Discrete cosserat approach for multisection soft manipulator dynamics,
F. Renda, F. Boyer, J. Dias, and L. Seneviratne, “Discrete cosserat approach for multisection soft manipulator dynamics,”IEEE Transac- tions on Robotics, vol. 34, no. 6, pp. 1518–1533, 2018
2018
-
[17]
A review of techniques for modeling flexible cables,
N. Lv, J. Liu, H. Xia, J. Ma, and X. Yang, “A review of techniques for modeling flexible cables,”Computer-Aided Design, vol. 122, p. 102826, 2020. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S0010448520300191
2020
-
[18]
Elastica: A compliant mechanics environment for soft robotic control,
N. Naughton, J. Sun, A. Tekinalp, T. Parthasarathy, G. Chowdhary, and M. Gazzola, “Elastica: A compliant mechanics environment for soft robotic control,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3389–3396, 2021
2021
-
[19]
Multistage cable routing through hierarchical imitation learning,
J. Luo, C. Xu, X. Geng, G. Feng, K. Fang, L. Tan, S. Schaal, and S. Levine, “Multistage cable routing through hierarchical imitation learning,”IEEE Transactions on Robotics, vol. 40, pp. 1476–1491, 2024
2024
-
[20]
Nonlinear problems of elasticity (stuart s. antman),
M. Renardy, “Nonlinear problems of elasticity (stuart s. antman),” SIAM Review, vol. 37, no. 4, pp. 637–637, 1995. [Online]. Available: https://doi.org/10.1137/1037152
-
[21]
M. Gazzola, L. H. Dudte, A. G. McCormick, and L. Mahadevan, “Forward and inverse problems in the mechanics of soft filaments,” Royal Society Open Science, vol. 5, no. 6, p. 171628, 06 2018. [Online]. Available: https://doi.org/10.1098/rsos.171628
-
[22]
M. Bergou, M. Wardetzky, S. Robinson, B. Audoly, and E. Grinspun, “Discrete elastic rods,” inACM SIGGRAPH 2008 Papers, ser. SIGGRAPH ’08. New York, NY , USA: Association for Computing Machinery, 2008. [Online]. Available: https://doi.org/10.1145/1399504.1360662
-
[23]
Elastica: Cosserat rods,
Gazzola Lab, “Elastica: Cosserat rods,” Website, developed and maintained by the Gazzola Lab at the University of Illinois at Urbana- Champaign. [Online]. Available: https://www.cosseratrods.org/
-
[24]
A. Tekinalp, S. H. Kim, Y . Bhosale, T. Parthasarathy, N. Naughton, A. Albazroun, R. Joon, S. Cui, I. Nasiriziba, M. St ¨olzle, C.-H. C. Shih, and M. Gazzola, “Gazzolalab/pyelastica,” 2024. [Online]. Available: https://doi.org/10.5281/zenodo.7658871
-
[25]
J. Hsu, T. Wang, K. Wu, and C. Yuksel, “Stable cosserat rods,” inProceedings of the Special Interest Group on Computer Graphics and Interactive Techniques Conference Conference Papers, ser. SIGGRAPH Conference Papers ’25. New York, NY , USA: Association for Computing Machinery, 2025. [Online]. Available: https://doi.org/10.1145/3721238.3730618
-
[26]
Skinning mesh animations,
D. L. James and C. D. Twigg, “Skinning mesh animations,”ACM Transactions on Graphics (TOG), vol. 24, no. 3, pp. 399–407, 2005
2005
-
[27]
White coexflex 60a tpu,
COEX 3D, “White coexflex 60a tpu,” accessed: 2026-03-05. [Online]. Available: https://coex3d.com/products/white-coexflex-60a-tpu
2026
-
[28]
Data center assets pack,
NVIDIA Corporation, “Data center assets pack,” Online documentation, NVIDIA Omniverse, accessed: 2026-03-06. [Online]. Available: https://docs.omniverse.nvidia.com/usd/latest/ usd content samples/downloadable packs.html
2026
-
[29]
Trackdlo: Tracking deformable linear objects under occlusion with motion coherence,
J. Xiang, H. Dinkel, H. Zhao, N. Gao, B. Coltin, T. Smith, and T. Bretl, “Trackdlo: Tracking deformable linear objects under occlusion with motion coherence,”IEEE Robotics and Automation Letters, vol. 8, no. 10, pp. 6179–6186, 2023
2023
-
[30]
Depth anything 3: Recovering the visual space from any views,
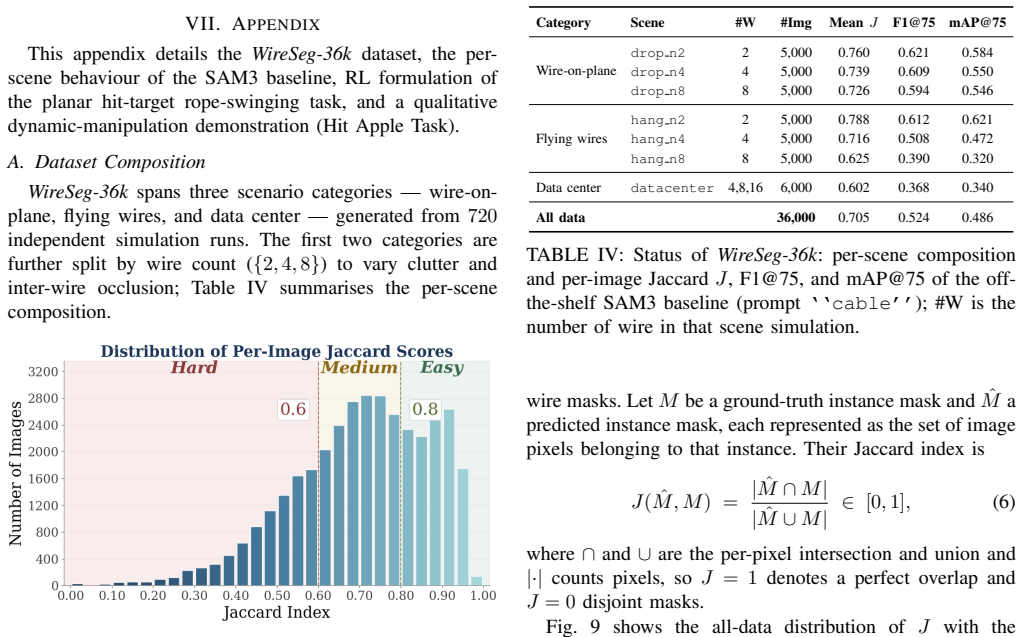
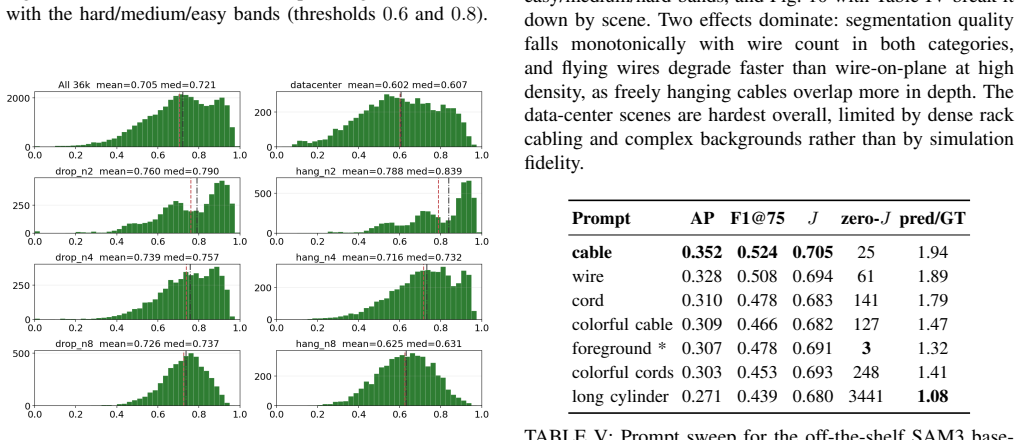
H. Lin, S. Chen, J. Liew, D. Y . Chen, Z. Li, G. Shi, J. Feng, and B. Kang, “Depth anything 3: Recovering the visual space from any views,” 2025. [Online]. Available: https://arxiv.org/abs/2511.10647 VII. APPENDIX This appendix details theWireSeg-36kdataset, the per- scene behaviour of the SAM3 baseline, RL formulation of the planar hit-target rope-swingi...
Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.