CSAR: Containerized System Architecture for Robotics
Pith reviewed 2026-06-30 05:13 UTC · model grok-4.3
The pith
CSAR uses LXC containers and ROS 2 to isolate dependencies while sharing hardware across edge devices for robotics teams.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
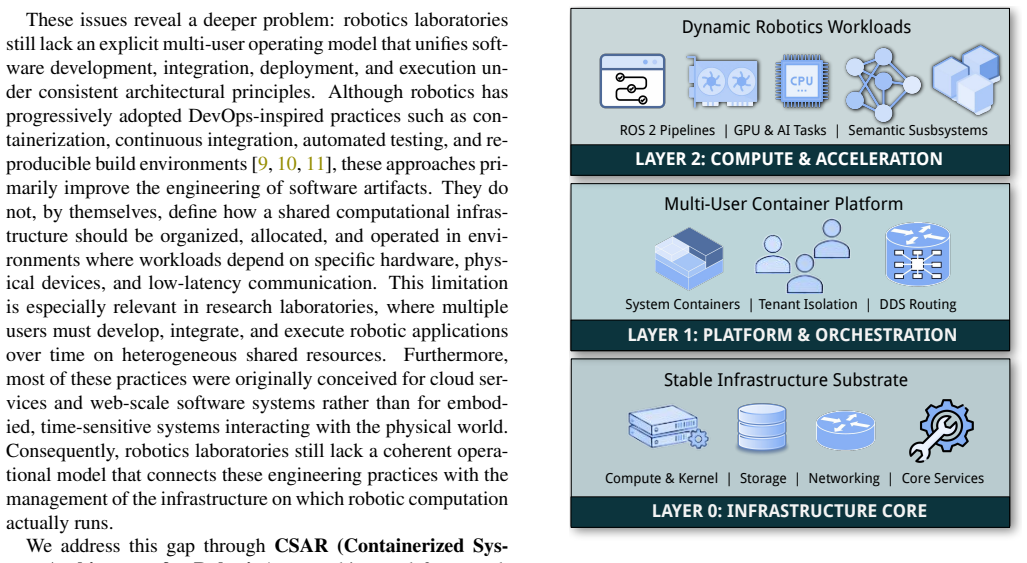
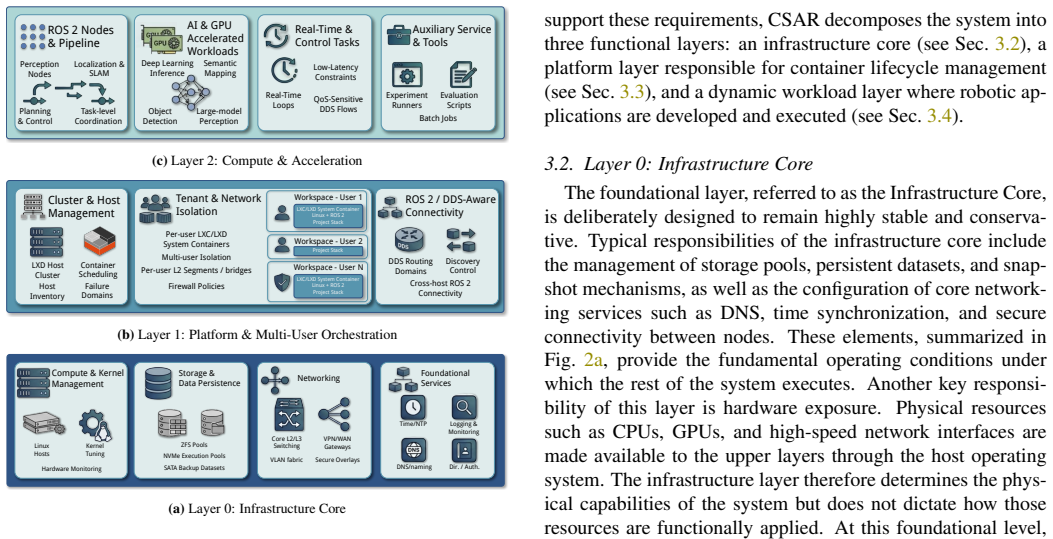
CSAR combines LXC/LXD-based system containerization, ROS 2/DDS communication, and a three-layer edge infrastructure to organize computation into hardware-affine, persistent execution environments that remain decoupled from the volatility of experimental workloads, providing strong isolation, controlled resource sharing, and topology-aware networking through its Infrastructure Core, Platform and Multi-User Orchestration, and Compute and Acceleration layers.
What carries the argument
Three-layer edge infrastructure that uses LXC/LXD system containers and ROS 2/DDS communication to create persistent, hardware-affine execution environments.
If this is right
- Software integration for distributed robotic applications becomes simpler.
- Utilization of shared computational resources improves.
- Safe prototyping and reproducible experimentation are facilitated for teams.
- Deployment across heterogeneous edge-cloud environments is supported.
Where Pith is reading between the lines
- The container approach could shorten onboarding time when new members join an existing robotics project.
- Similar layering might reduce conflicts in other multi-user domains that mix experimental code with production hardware.
- The persistent environments could support long-term maintenance of deployed robotic systems without repeated full redeployments.
Load-bearing premise
That LXC/LXD containers combined with ROS 2 will resolve dependency isolation, compatibility, and reproducibility problems for multi-user robotics teams.
What would settle it
A side-by-side comparison in the same lab where one team runs conflicting dependency versions with and without CSAR and records the number of integration failures and reproduction errors.
Figures
read the original abstract
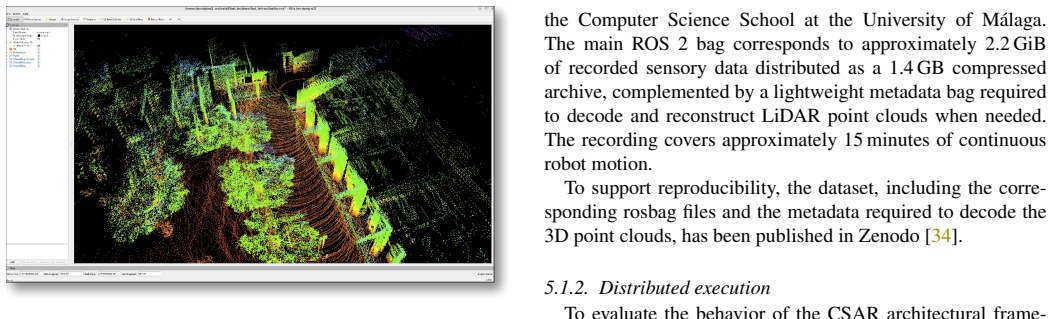
Robotic applications increasingly rely on distributed computational infrastructures that combine embedded devices, edge servers, and cloud resources. This evolution, together with the collaborative nature of robotics projects, has made the development, integration, deployment, and long-term operation of robotic systems significantly more complex. In practice, multi-user robotics software teams face persistent challenges related to dependency isolation, compatibility, reproducibility, efficient sharing of specialized hardware, and deployment across heterogeneous environments. In this paper, we present CSAR (Containerized System Architecture for Robotics), a container-centric architectural framework designed specifically for robotics teams and the edge-cloud continuum. CSAR combines LXC/LXD-based system containerization, ROS 2/DDS-based communication, and a three-layer edge infrastructure to organize computation into hardware-affine, persistent execution environments that remain decoupled from the volatility of experimental workloads. Through its Infrastructure Core, Platform and Multi-User Orchestration, and Compute and Acceleration layers, CSAR provides strong isolation, controlled resource sharing, and topology-aware networking for distributed robotic applications. To demonstrate its validity, we describe a real deployment of CSAR in an academic robotics laboratory and evaluate it through representative use cases involving edge-offloaded 3D SLAM and GPU-accelerated semantic mapping. The results indicate that CSAR simplifies software integration, improves the utilization of shared computational resources, and facilitates safe prototyping, as well as reproducible and collaborative experimentation in robotics teams. The implementation described in this paper, including deployment templates, configuration files, and documentation, is available at https://github.com/goyoambrosio/CSAR.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents CSAR, a container-centric architectural framework for robotics that combines LXC/LXD system containerization with ROS 2/DDS communication inside a three-layer edge infrastructure (Infrastructure Core, Platform and Multi-User Orchestration, Compute and Acceleration). The framework is intended to deliver strong isolation, controlled resource sharing, and topology-aware networking for distributed robotic applications while addressing dependency isolation, compatibility, reproducibility, and hardware sharing in multi-user teams. Validity is shown through a real academic laboratory deployment evaluated on two use cases (edge-offloaded 3D SLAM and GPU-accelerated semantic mapping), with the results claimed to indicate simplified integration, improved shared-resource utilization, and safer reproducible experimentation. The implementation, templates, and documentation are released at https://github.com/goyoambrosio/CSAR.
Significance. If the claims are substantiated with quantitative evidence, CSAR could supply a practical, robotics-specific containerization approach that improves collaborative development on heterogeneous edge-cloud setups. The open release of deployment artifacts is a clear strength that aids reproducibility and adoption.
major comments (2)
- [Evaluation / use cases] The evaluation of the real deployment and two use cases (abstract and corresponding results section) asserts that CSAR 'simplifies software integration, improves the utilization of shared computational resources' yet supplies no quantitative metrics, baseline comparisons, isolation measurements (e.g., container overhead, resource contention, network latency), or error analysis, leaving the central claim of 'strong isolation' and 'controlled resource sharing' without verifiable support.
- [Abstract / motivation and design goals] The design premise (abstract) that LXC/LXD containers plus ROS 2/DDS in the three-layer model resolves dependency isolation and reproducibility challenges for multi-user teams is presented as validated by the lab deployment, but the absence of any comparative data or isolation benchmarks makes this load-bearing assertion unsupported.
minor comments (2)
- Figure or diagram clarity: the three-layer model would benefit from an explicit topology diagram showing how Infrastructure Core, Platform, and Compute layers interact with ROS 2/DDS topics and LXD networking.
- The GitHub repository is referenced but the manuscript does not indicate which specific configuration files or templates correspond to the SLAM and semantic-mapping use cases.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We agree that the evaluation section would benefit from additional quantitative metrics and benchmarks to better support the claims regarding isolation and resource sharing. We address each major comment below and will incorporate revisions to strengthen the paper.
read point-by-point responses
-
Referee: [Evaluation / use cases] The evaluation of the real deployment and two use cases (abstract and corresponding results section) asserts that CSAR 'simplifies software integration, improves the utilization of shared computational resources' yet supplies no quantitative metrics, baseline comparisons, isolation measurements (e.g., container overhead, resource contention, network latency), or error analysis, leaving the central claim of 'strong isolation' and 'controlled resource sharing' without verifiable support.
Authors: We acknowledge that the presented evaluation is primarily descriptive and qualitative, based on the practical outcomes observed in the academic laboratory deployment and the two use cases. No quantitative metrics for overhead, contention, or latency are included in the current manuscript. This is a valid observation. In the revised manuscript, we will expand the results section to include such measurements (e.g., container startup overhead, CPU/memory utilization under shared workloads, and network performance data) along with baseline comparisons where feasible, to provide verifiable support for the claims. revision: yes
-
Referee: [Abstract / motivation and design goals] The design premise (abstract) that LXC/LXD containers plus ROS 2/DDS in the three-layer model resolves dependency isolation and reproducibility challenges for multi-user teams is presented as validated by the lab deployment, but the absence of any comparative data or isolation benchmarks makes this load-bearing assertion unsupported.
Authors: The abstract reflects the design goals and the observed benefits from the real-world deployment. However, we agree that without comparative benchmarks, the validation of how the architecture specifically resolves these challenges remains limited. We will revise the evaluation section with the quantitative data noted above and adjust the abstract wording if needed to align with the strengthened evidence. revision: yes
Circularity Check
No circularity: architecture paper with no derivations, fits, or predictions
full rationale
The paper presents CSAR as a container-centric architectural framework using LXC/LXD, ROS 2/DDS, and a three-layer infrastructure. It describes the design, a real-lab deployment, and qualitative use-case observations (edge-offloaded 3D SLAM, GPU semantic mapping) without any equations, parameter fitting, predictions, or uniqueness theorems. No load-bearing steps reduce to self-citations, ansatzes, or renamed inputs; the contribution is an implemented system whose validity is asserted via deployment description rather than derived quantities. This matches the default non-circular case for system-architecture papers.
Axiom & Free-Parameter Ledger
invented entities (1)
-
CSAR three-layer model (Infrastructure Core, Platform and Multi-User Orchestration, Compute and Acceleration)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Vaswani, N
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, L. Kaiser, I. Polosukhin, Attention is all you need, in: I. Guyon, U. von Luxburg, S. Bengio, H. M. Wallach, R. Fergus, S. V . N. Vishwanathan, R. Garnett (Eds.), Advances in Neural Information Processing Sys- tems 30: Annual Conference on Neural Information Pro- cessing Systems 2017,...
2017
-
[2]
Radford, K
A. Radford, K. Narasimhan, T. Salimans, I. Sutskever, Improving language understanding by generative pre- training, OpenAI Tech (2018)
2018
-
[3]
Devlin, M.-W
J. Devlin, M.-W. Chang, K. Lee, K. Toutanova, Bert: Pre- training of deep bidirectional transformers for language understanding, in: Proceedings of the 2019 conference of the North American chapter of the association for com- putational linguistics: human language technologies, vol- ume 1 (long and short papers), 2019, pp. 4171–4186
2019
-
[4]
Radford, J
A. Radford, J. Wu, R. Child, D. Luan, D. Amodei, I. Sutskever, Language models are unsupervised multi- task learners, OpenAI Tech (2019). URLhttps://api.semanticscholar.org/ CorpusID:160025533
2019
-
[5]
A. J. OPENAI, S. ADLER, et al., Gpt-4 technical report [eb], arXiv preprint arXiv:2303.08774 (2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[6]
J. Moncada-Ramirez, J.-L. Matez-Bandera, J. Gonzalez- Jimenez, J.-R. Ruiz-Sarmiento, Agentic workflows for improving large language model reasoning in robotic object-centered planning, Robotics 14 (3) (2025).doi: 10.3390/robotics14030024. URLhttps://www.mdpi.com/2218-6581/14/3/24
-
[7]
Science Robotics7(66), eabm6074 (2022).https://doi.org/10.1126/scirobotics.abm6074
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, W. Woodall, Robot operating system 2: Design, architec- ture, and uses in the wild, Science Robotics 7 (66) (2022) eabm6074.doi:10.1126/scirobotics.abm6074. URLhttps://www.science.org/doi/abs/10. 1126/scirobotics.abm6074
-
[8]
O. M. Group, Omg data distribution service (dds) ver- sion 1.4,https://www.omg.org/spec/DDS/1.4/PDF, accessed on 1 july 2025 (March 2015)
2025
-
[9]
A. S. da Silva, A. Kreutz, G. Weiss, J. Rothe, C. Ihrke, De- vops in robotics: Challenges and practices, in: T. Batista, T. Bureš, C. Raibulet, H. Muccini (Eds.), Software Ar- chitecture. ECSA 2022 Tracks and Workshops, Springer International Publishing, Cham, 2023, pp. 284–299
2022
-
[10]
K. C. Ronanki, Robotic software development using devops (2021). URLhttps://urn.kb.se/resolve?urn=urn:nbn: se:bth-22024
2021
-
[11]
Mavrinac, Devops for robotics,https://www
A. Mavrinac, Devops for robotics,https://www. prosiglieres.com/posts/devops-for-robots/, [Accessed 27-03-2024] (October 12, 2023)
2024
-
[12]
L. E. Hafi, G. A. G. Ricardez, F. von Drigalski, Y . Inoue, M. Yamamoto, T. Yamamoto, Software development environment for collaborative research workflow in robotic system integration, Advanced Robotics 36 (11) (2022) 533–547.arXiv:https: //doi.org/10.1080/01691864.2022.2068353, doi:10.1080/01691864.2022.2068353. URLhttps://doi.org/10.1080/01691864.2022. 2068353
-
[13]
S. Soltesz, H. Pötzl, M. E. Fiuczynski, A. Bavier, L. Pe- terson, Container-based operating system virtualization: A scalable, high-performance alternative to hypervisors, ACM SIGOPS Operating Systems Review 41 (3) (2007) 275–287.doi:10.1145/1272996.1273025
-
[14]
D. Merkel, Docker: lightweight linux containers for consistent development and deployment, Linux journal 2014 (239) (2014) 2. URLhttps://dl.acm.org/doi/10.5555/2600239. 2600241
-
[15]
White, H
R. White, H. Christensen, Ros and docker, in: Robot Op- erating System (ROS): The Complete Reference (V olume 12 2), Springer, Cham, 2017, pp. 285–307.doi:10.1007/ 978-3-319-54927-9_9
2017
-
[16]
D. Kr ¯umin, š, V . Vunder, H. Kasemägi, A. Aabloo, K. Kru- usamäe, Open-source web lab for remote and on-site robotics practice in a realistic zero-setup ros 2 develop- ment environment, IEEE Robotics and Automation Prac- tice 1 (2026) 1–6.doi:10.1109/RAP.2025.3629341
-
[17]
Y . Liu, D. Lan, Z. Pang, M. Karlsson, S. Gong, Perfor- mance evaluation of containerization in edge-cloud com- puting stacks for industrial applications: A client perspec- tive, IEEE Open Journal of the Industrial Electronics So- ciety 2 (2021) 153–168.doi:10.1109/OJIES.2021. 3055901
-
[18]
T. Betz, H. Teper, D. Ebner, M. Leitenstern, S. Sagmeis- ter, M. Weinmann, J.-J. Chen, M. Lienkamp, End-to-end latency optimization for containerized ros 2 autonomous driving software, IEEE Access 13 (2025) 112654– 112672.doi:10.1109/ACCESS.2025.3582868
-
[19]
Graber, Lxc 1.0: Security features, https://www.stgraber.org/2014/01/01/ lxc-1-0-security-features/, accessed: 2024- 06-02 (2014)
S. Graber, Lxc 1.0: Security features, https://www.stgraber.org/2014/01/01/ lxc-1-0-security-features/, accessed: 2024- 06-02 (2014)
2014
-
[20]
Plauth, L
M. Plauth, L. Feinbube, A. Polze, A performance evalua- tion of lightweight approaches to virtualization, in: Cloud Computing 2017, 2017
2017
-
[21]
S. Wang, X. Liu, J. Zhao, H. I. Christensen, Rorg: Ser- vice robot software management with linux containers, in: 2019 International Conference on Robotics and Automa- tion (ICRA), 2019, pp. 584–590.doi:10.1109/ICRA. 2019.8793764
-
[22]
Tahir, R
N. Tahir, R. Parasuraman, Edge computing and its application in robotics: A survey, Journal of Sensor and Actuator Networks 14 (2025) 65.doi:10.3390/ jsan14040065
2025
-
[23]
J. Ichnowski, K. Chen, K. Dharmarajan, S. Adebola, M. Danielczuk, V . Mayoral-Vilches, N. Jha, H. Zhan, E. Llontop, D. Xu, C. Buscaron, J. Kubiatowicz, I. Sto- ica, J. Gonzalez, K. Goldberg, Fogros2: An adaptive plat- form for cloud and fog robotics using ros 2, in: IEEE/RSJ International Conference on Intelligent Robots and Sys- tems (IROS), 2023, pp. 54...
-
[24]
Rensin, Kubernetes, 1st Edition, O’Reilly Media, Inc., 2015
D. Rensin, Kubernetes, 1st Edition, O’Reilly Media, Inc., 2015. URLhttp://www.oreilly.com/webops-perf/ free/kubernetes.csp
2015
-
[25]
J. Zhang, X. Yu, T. Westerlund, Enhancing the resilience of ros 2-based multi-robot systems with kubernetes: A case study on uwb-based relative positioning, Sensors 25 (16) (2025).doi:10.3390/s25165067. URLhttps://www.mdpi.com/1424-8220/25/16/ 5067
-
[26]
F. Lumpp, F. Fummi, H. D. Patel, N. Bombieri, En- abling kubernetes orchestration of mixed-criticality soft- ware for autonomous mobile robots, IEEE Transactions on Robotics 40 (2024) 540–553.doi:10.1109/TRO. 2023.3334642
work page doi:10.1109/tro 2024
-
[27]
A Survey of Real-Time Support, Analysis, and Advancements in ROS 2
D. Casini, J.-J. Chen, J. Li, F. Reghenzani, H. Teper, A survey of real-time support, analysis, and advancements in ros 2 (2025).arXiv:2601.10722. URLhttps://arxiv.org/abs/2601.10722
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[28]
N. Baumann, M. Baumgartner, E. Ghignone, J. Kühne, T. Fischer, Y .-H. Yang, M. Pollefeys, M. Magno, Cr3dt: Camera-radar fusion for 3d detection and tracking, in: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 4926–4933.doi: 10.1109/IROS58592.2024.10801848
-
[29]
B. Wu, Z. Zhang, Z. Bai, X. Liu, X. Jin, Transparent GPU sharing in container clouds for deep learning workloads, in: USENIX Symposium on Networked Systems Design and Implementation, 2023, pp. 69–85
2023
-
[30]
H. Zhu, W. Zhang, X. Zhang, Z. Tao, X. Lin, Y . Zhang, J. Ji, Y . Zhang, Urgengo: Urgency-aware transparent gpu kernel launching for autonomous driving, in: Proceedings of the 31st Annual International Conference on Mobile Computing and Networking, ACM MOBICOM ’25, As- sociation for Computing Machinery, New York, NY , USA, 2025, p. 938–952.doi:10.1145/368...
-
[31]
G. Ambrosio-Cestero, J.-R. Ruiz-Sarmiento, J. Gonzalez- Jimenez, The robot@home2 dataset: A new release with improved usability tools, SoftwareX 23 (2023) 101490. doi:https://doi.org/10.1016/j.softx.2023. 101490. URLhttps://www.sciencedirect.com/science/ article/pii/S2352711023001863
-
[32]
B. Brazil, Prometheus: Up & Running: Infrastructure and Application Performance Monitoring, 1st Edition, O’Reilly Media, Inc., Sebastopol, CA, 2018. URLhttps://www.oreilly.com/library/view/ prometheus-up/9781492034131/
-
[33]
S. Kirešová, M. Guzan, B. Fecko, O. Somka, V . Rusyn, R. Yatsiuk, Grafana as a visualization tool for measure- ments, in: 2023 IEEE 5th International Conference on Modern Electrical and Energy System (MEES), 2023, pp. 1–5.doi:10.1109/MEES61502.2023.10402486
-
[34]
https://doi.org/10.5281/zenodo
F. Anaya Palacios, C. Galindo, J. González-Jiménez, Mo- bile robot dataset with ouster os1-32 lidar at the univer- sity of málaga, data set (2025).doi:10.5281/zenodo. 15301791. URLhttps://doi.org/10.5281/zenodo.15301791 13
-
[35]
W. Xu, F. Zhang, Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman fil- ter, IEEE Robotics and Automation Letters 6 (2) (2021) 3317–3324.doi:10.1109/LRA.2021.3064227
-
[36]
J.-R. Ruiz-Sarmiento, C. Galindo, J. Gonzalez- Jimenez, Building multiversal semantic maps for mobile robot operation, Knowledge-Based Systems 119 (2017) 257–272.doi:https: //doi.org/10.1016/j.knosys.2016.12.016. URLhttps://www.sciencedirect.com/science/ article/pii/S0950705116305184
-
[37]
Y . Wu, A. Kirillov, F. Massa, W.-Y . Lo, R. Girshick, De- tectron2,https://github.com/facebookresearch/ detectron2(2019)
2019
-
[38]
J.-L. Matez-Bandera, P. Ojeda, J. Monroy, J. Gonzalez- Jimenez, J.-R. Ruiz-Sarmiento, V oxeland: Probabilistic instance-aware semantic mapping with evidence-based uncertainty quantification (2024).arXiv:2411.08727. URLhttps://arxiv.org/abs/2411.08727
-
[39]
J. Moncada-Ramirez, J. R. Ruiz-Sarmiento, J. L. Matez-Bandera, J. Gonzalez-Jimenez, Large mod- els for semantic mapping in mobile robotics, in: XLV Jornadas de Automática, 2024.doi:https: //doi.org/10.17979/ja-cea.2024.45.10940. URLhttps://revistas.udc.es/index.php/JA_ CEA/article/view/10940/8379
-
[40]
A. Cañete, E. Quemada-Torres, J. R. Ruiz-Sarmiento, F.- A. Moreno, J. Gonzalez-Jimenez, Multimodal system for the orientation of mobile robots towards its interlocutor, in: XLV Jornadas de Automática, 2024.doi:https: //doi.org/10.17979/ja-cea.2024.45.10939. URLhttps://revistas.udc.es/index.php/JA_ CEA/article/view/10939/8378 14
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.