Verifiable Geometry Problem Solving: Solver-Driven Autoformalization and Theorem Proposing
Pith reviewed 2026-06-29 04:20 UTC · model grok-4.3
The pith
A neuro-symbolic solver uses executability feedback to drive both formalization of geometry problems and proposal of auxiliary theorems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
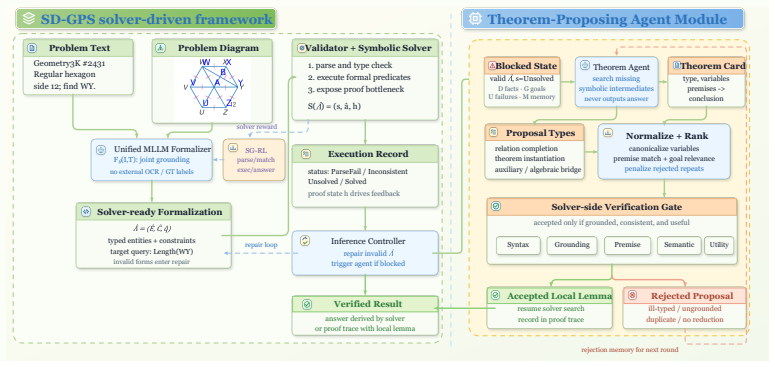
SD-GPS unifies Solver-Driven Autoformalization, which trains a QwenVL3-2B model by making executability the central signal, with Verified Theorem Proposing, which deploys an impasse-aware agent to suggest local auxiliary lemmas that are then filtered by the symbolic solver for soundness.
What carries the argument
The symbolic solver acting as an execution oracle that supplies feedback for both autoformalization training and lemma verification.
If this is right
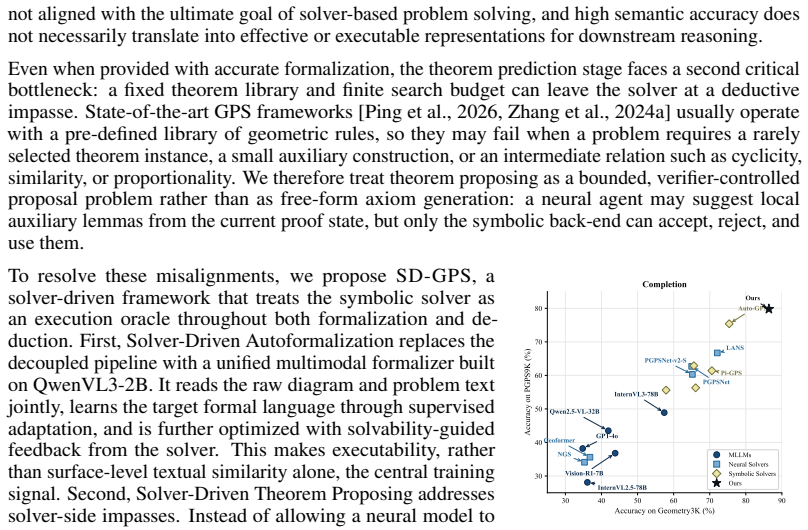
- SD-GPS outperforms existing MLLM, neural, and neuro-symbolic methods on Geometry3K and PGPS9K across completion, multiple-choice, and cross-modal reference settings.
- Closing the loop between multimodal perception and symbolic execution improves verifiable geometric reasoning.
- The framework supports verifiable problem-solving by grounding neural agents in formal systems.
Where Pith is reading between the lines
- The same oracle-driven pattern could be tested in other formal domains such as algebraic identities or graph algorithms where executable checkers exist.
- Reducing reliance on large human-annotated formal datasets becomes possible if executability alone provides sufficient training signal.
- Iterative lemma proposal might allow the system to tackle proofs that exceed the depth limits of fixed rule libraries.
Load-bearing premise
Executability can serve as a reliable central training signal for the autoformalization module without causing overfitting to solver quirks or generation of formally correct but semantically useless statements.
What would settle it
If the trained model produces many formally valid statements that the solver cannot turn into complete proofs on a new set of geometry problems, or if performance gains vanish when the solver is swapped for a different one, the claim that the closed loop improves reasoning would be refuted.
Figures
read the original abstract
Geometry Problem Solving have increasingly adopt the neuro-symbolic paradigm, combining neural intuition with symbolic rigor. However, current frameworks suffer from severe bottlenecks in two core stages: autoformalization, which treats multimodal translation as a static task decoupled from downstream solver compatibility, and theorem prediction, where solvers frequently hit a deductive impasse due to fixed rule libraries. To address these, we propose SD-GPS, a solver-driven framework that treats the symbolic solver as an execution oracle throughout both formalization and deduction. First, Solver-Driven Autoformalization unifies supervised formal-language adaptation and solvability-guided reinforcement learning into a single module built on QwenVL3-2B, making executability the central training signal. Second, Verified Theorem Proposing introduces an impasse-aware agent that proposes local auxiliary lemmas from current proof states, ensuring soundness by filtering all proposals through symbolic verification. Empirical evaluations on Geometry3K and PGPS9K demonstrate that SD-GPS consistently outperforms existing MLLM, neural, and neuro-symbolic methods across standard completion, multiple-choice, and cross-modal reference regimes, proving that closing the loop between multimodal perception and symbolic execution significantly improves geometric reasoning, offering profound insights into how neural agents can be grounded by formal systems to achieve verifiable problem-solving capabilities.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SD-GPS, a solver-driven neuro-symbolic framework for geometry problem solving. Solver-Driven Autoformalization unifies supervised formal-language adaptation with solvability-guided RL on QwenVL3-2B, treating executability by the symbolic solver as the central training signal. Verified Theorem Proposing uses an impasse-aware agent to generate local auxiliary lemmas from proof states, with all proposals filtered by symbolic verification. Empirical results on Geometry3K and PGPS9K are claimed to show consistent outperformance over MLLM, neural, and neuro-symbolic baselines across completion, multiple-choice, and cross-modal regimes.
Significance. If the reported gains hold and formalizations remain semantically faithful, the work would demonstrate a practical way to ground multimodal models via execution oracles, advancing verifiable neuro-symbolic reasoning. The explicit use of solver feedback in both autoformalization and deduction, together with verification filtering, constitutes a clear methodological contribution over static translation pipelines.
major comments (1)
- [Solver-Driven Autoformalization] Solver-Driven Autoformalization (abstract and § on the module): executability is positioned as the primary training signal unifying supervised adaptation and RL for QwenVL3-2B. No explicit mechanism (e.g., semantic similarity constraints, human-annotated fidelity checks, or degeneracy detection) is described to ensure statements remain faithful to the original diagram and text beyond post-hoc solver verification. This is load-bearing for the central claim, because measured gains on Geometry3K/PGPS9K could arise from solver-exploitable formalizations rather than improved geometric reasoning.
minor comments (2)
- [Abstract] Abstract: asserts 'consistent outperformance' and 'proving that closing the loop... significantly improves geometric reasoning' without any numerical results, ablation tables, or dataset statistics; this makes the strength of the empirical case difficult to gauge from the abstract alone.
- The manuscript would benefit from a dedicated limitations subsection discussing potential solver-specific artifacts or cases where executability diverges from semantic correctness.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. Below we address the single major comment point by point.
read point-by-point responses
-
Referee: [Solver-Driven Autoformalization] Solver-Driven Autoformalization (abstract and § on the module): executability is positioned as the primary training signal unifying supervised adaptation and RL for QwenVL3-2B. No explicit mechanism (e.g., semantic similarity constraints, human-annotated fidelity checks, or degeneracy detection) is described to ensure statements remain faithful to the original diagram and text beyond post-hoc solver verification. This is load-bearing for the central claim, because measured gains on Geometry3K/PGPS9K could arise from solver-exploitable formalizations rather than improved geometric reasoning.
Authors: We agree that the absence of explicit fidelity safeguards beyond executability is a substantive concern for the central claim. The module first performs supervised adaptation on human-annotated formalizations drawn from the training splits of Geometry3K and PGPS9K; these annotations are constructed to preserve the semantics of the original text and diagram. The RL stage then optimizes only for solver executability while keeping the policy close to the supervised initialization via a KL penalty. Nevertheless, the manuscript does not report additional mechanisms such as semantic similarity constraints, post-hoc human fidelity audits, or explicit degeneracy detection. We therefore accept the referee’s point and will revise the paper to (i) add a dedicated paragraph in the Solver-Driven Autoformalization section describing the reliance on supervised initialization and the KL regularizer, (ii) include a small-scale manual audit of 100 sampled formalizations for semantic drift, and (iii) report a simple degeneracy metric (e.g., ratio of degenerate predicates) on the test set. These additions will appear in the revised manuscript. revision: yes
Circularity Check
No circularity: solver as external oracle with benchmark-driven claims
full rationale
The paper's core claims rest on empirical outperformance of SD-GPS on the independent benchmarks Geometry3K and PGPS9K across multiple regimes. Solver-Driven Autoformalization uses executability as a training signal from an external symbolic solver treated as oracle, and Verified Theorem Proposing filters proposals via symbolic verification. No equations, self-definitions, or load-bearing steps reduce the reported gains to fitted parameters renamed as predictions or to self-citation chains. The derivation chain is self-contained against external benchmarks and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The symbolic solver functions as a reliable, low-error execution oracle for both training signals and lemma verification.
Reference graph
Works this paper leans on
-
[1]
Inter-GPS: Interpretable Geometry Problem Solving with Formal Language and Symbolic Reasoning , author=. Proceedings of the 59th Annual Meeting of the Association for Computational Linguistics and the 11th International Joint Conference on Natural Language Processing (Volume 1: Long Papers) , pages=
-
[2]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
E-gps: Explainable geometry problem solving via top-down solver and bottom-up generator , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[3]
Proceedings of the Thirty-Second International Joint Conference on Artificial Intelligence , pages=
A multi-modal neural geometric solver with textual clauses parsed from diagram , author=. Proceedings of the Thirty-Second International Joint Conference on Artificial Intelligence , pages=
-
[4]
2022 26th international conference on pattern recognition (ICPR) , pages=
PGDP5K: A diagram parsing dataset for plane geometry problems , author=. 2022 26th international conference on pattern recognition (ICPR) , pages=. 2022 , organization=
2022
-
[5]
Findings of the Association for Computational Linguistics: ACL 2023 , pages=
Geodrl: A self-learning framework for geometry problem solving using reinforcement learning in deductive reasoning , author=. Findings of the Association for Computational Linguistics: ACL 2023 , pages=
2023
-
[6]
Proceedings of the 2015 conference on empirical methods in natural language processing , pages=
Solving geometry problems: Combining text and diagram interpretation , author=. Proceedings of the 2015 conference on empirical methods in natural language processing , pages=
2015
-
[7]
arXiv preprint arXiv:2205.09363 , year=
Plane geometry diagram parsing , author=. arXiv preprint arXiv:2205.09363 , year=
-
[8]
arXiv preprint arXiv:2402.11461 , year=
Fgeo-hypergnet: Geometric problem solving integrating formal symbolic system and hypergraph neural network , author=. arXiv preprint arXiv:2402.11461 , year=
-
[9]
Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , month =
Zhao, Junbo and Zhang, Ting and Sun, Jiayu and Tian, Mi and Huang, Hua , title =. Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , month =. 2025 , pages =
2025
-
[10]
2026 , eprint=
AutoGPS: Automated Geometry Problem Solving via Multimodal Formalization and Deductive Reasoning , author=. 2026 , eprint=
2026
-
[11]
2024 , eprint=
GPT-4o System Card , author=. 2024 , eprint=
2024
-
[12]
Jiahui Gao and Renjie Pi and Jipeng Zhang and Jiacheng Ye and Wanjun Zhong and Yufei Wang and Lanqing HONG and Jianhua Han and Hang Xu and Zhenguo Li and Lingpeng Kong , booktitle=. G-. 2025 , url=
2025
-
[13]
2025 , eprint=
Vision-R1: Incentivizing Reasoning Capability in Multimodal Large Language Models , author=. 2025 , eprint=
2025
-
[14]
arXiv preprint arXiv:2412.05271 , year=
Expanding Performance Boundaries of Open-Source Multimodal Models with Model, Data, and Test-Time Scaling , author=. arXiv preprint arXiv:2412.05271 , year=
-
[15]
arXiv preprint arXiv:2411.10442 , year=
Enhancing the Reasoning Ability of Multimodal Large Language Models via Mixed Preference Optimization , author=. arXiv preprint arXiv:2411.10442 , year=
-
[16]
Visual Intelligence , volume=
Mini-InternVL: a flexible-transfer pocket multi-modal model with 5\ author=. Visual Intelligence , volume=. 2024 , publisher=
2024
-
[17]
Science China Information Sciences , volume=
How far are we to gpt-4v? closing the gap to commercial multimodal models with open-source suites , author=. Science China Information Sciences , volume=. 2024 , publisher=
2024
-
[18]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Internvl: Scaling up vision foundation models and aligning for generic visual-linguistic tasks , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[19]
2025 , eprint=
InternVL3: Exploring Advanced Training and Test-Time Recipes for Open-Source Multimodal Models , author=. 2025 , eprint=
2025
-
[20]
2025 , eprint=
Qwen2.5 Technical Report , author=. 2025 , eprint=
2025
-
[21]
2025 , eprint=
MATP-BENCH: Can MLLM Be a Good Automated Theorem Prover for Multimodal Problems? , author=. 2025 , eprint=
2025
-
[22]
Solving Olympiad Geometry without Human Demonstrations , year =
Trinh, Trieu and Wu, Yuhuai and Le, Quoc and He, He and Luong, Thang , journal =. Solving Olympiad Geometry without Human Demonstrations , year =
-
[23]
2024 , eprint=
DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models , author=. 2024 , eprint=
2024
-
[24]
2025 , eprint=
Group Sequence Policy Optimization , author=. 2025 , eprint=
2025
-
[25]
2025 , eprint=
A Minimalist Proof Language for Neural Theorem Proving over Isabelle/HOL , author=. 2025 , eprint=
2025
-
[26]
2026 , eprint=
MMFormalizer: Multimodal Autoformalization in the Wild , author=. 2026 , eprint=
2026
-
[27]
Solving Geometry Problems: Combining Text and Diagram Interpretation
Seo, Minjoon and Hajishirzi, Hannaneh and Farhadi, Ali and Etzioni, Oren and Malcolm, Clint. Solving Geometry Problems: Combining Text and Diagram Interpretation. Proceedings of the 2015 Conference on Empirical Methods in Natural Language Processing. 2015. doi:10.18653/v1/D15-1171
-
[28]
2022 , eprint=
Autoformalization with Large Language Models , author=. 2022 , eprint=
2022
-
[29]
Symmetry , VOLUME =
Zhu, Na and Zhang, Xiaokai and Huang, Qike and Zhu, Fangzhen and Zeng, Zhenbing and Leng, Tuo , TITLE =. Symmetry , VOLUME =. 2025 , NUMBER =
2025
-
[30]
LANS : A Layout-Aware Neural Solver for Plane Geometry Problem
Li, Zhong-Zhi and Zhang, Ming-Liang and Yin, Fei and Liu, Cheng-Lin. LANS : A Layout-Aware Neural Solver for Plane Geometry Problem. Findings of the Association for Computational Linguistics: ACL 2024. 2024. doi:10.18653/v1/2024.findings-acl.153
-
[31]
2023 , eprint=
A Symbolic Character-Aware Model for Solving Geometry Problems , author=. 2023 , eprint=
2023
-
[32]
2024 , eprint=
GeoFormer: A Multi-Polygon Segmentation Transformer , author=. 2024 , eprint=
2024
-
[33]
2024 , eprint=
GOLD: Geometry Problem Solver with Natural Language Description , author=. 2024 , eprint=
2024
-
[34]
2024 , eprint=
Fuse, Reason and Verify: Geometry Problem Solving with Parsed Clauses from Diagram , author=. 2024 , eprint=
2024
-
[35]
2022 , eprint=
GeoQA: A Geometric Question Answering Benchmark Towards Multimodal Numerical Reasoning , author=. 2022 , eprint=
2022
-
[36]
Buchberger, B. , title =. SIGSAM Bull. , month = aug, pages =. 1976 , issue_date =. doi:10.1145/1088216.1088219 , abstract =
-
[37]
2025 , eprint=
GeoUni: A Unified Model for Generating Geometry Diagrams, Problems and Problem Solutions , author=. 2025 , eprint=
2025
-
[38]
Nature Machine Intelligence , volume=
Proposing and solving olympiad geometry with guided tree search , author=. Nature Machine Intelligence , volume=. 2026 , publisher=
2026
-
[39]
2025 , eprint=
Gold-medalist Performance in Solving Olympiad Geometry with AlphaGeometry2 , author=. 2025 , eprint=
2025
-
[40]
2025 , month = jan, day =
OpenAI o3-mini , author =. 2025 , month = jan, day =
2025
-
[41]
Gelernter, H. and Hansen, J. R. and Loveland, D. W. , title =. Papers Presented at the May 3-5, 1960, Western Joint IRE-AIEE-ACM Computer Conference , pages =. 1960 , isbn =. doi:10.1145/1460361.1460381 , abstract =
-
[42]
Learning to Solve Geometry Problems from Natural Language Demonstrations in Textbooks
Sachan, Mrinmaya and Xing, Eric. Learning to Solve Geometry Problems from Natural Language Demonstrations in Textbooks. Proceedings of the 6th Joint Conference on Lexical and Computational Semantics (* SEM 2017). 2017. doi:10.18653/v1/S17-1029
-
[43]
Wu, Wen-Tsun , title =. 1986 , issue_date =. doi:10.1007/BF02328447 , journal =
-
[44]
2024 , eprint=
Diagram Formalization Enhanced Multi-Modal Geometry Problem Solver , author=. 2024 , eprint=
2024
-
[45]
Autoformalization with Large Language Models , url =
Wu, Yuhuai and Jiang, Albert Qiaochu and Li, Wenda and Rabe, Markus and Staats, Charles and Jamnik, Mateja and Szegedy, Christian , booktitle =. Autoformalization with Large Language Models , url =
-
[46]
2026 , eprint=
Kimi K2.5: Visual Agentic Intelligence , author=. 2026 , eprint=
2026
-
[47]
2026 , eprint=
GLM-4.5V and GLM-4.1V-Thinking: Towards Versatile Multimodal Reasoning with Scalable Reinforcement Learning , author=. 2026 , eprint=
2026
-
[48]
2025 , eprint=
Qwen3-VL Technical Report , author=. 2025 , eprint=
2025
-
[49]
2024 , eprint=
FormalGeo: An Extensible Formalized Framework for Olympiad Geometric Problem Solving , author=. 2024 , eprint=
2024
-
[50]
On the Decision Problem and the Mechanization of Theorem-Proving in Elementary Geometry , journal =
Wu, Wen-ts. On the Decision Problem and the Mechanization of Theorem-Proving in Elementary Geometry , journal =
-
[51]
2025 , eprint=
DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Learning , author=. 2025 , eprint=
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.