HDST-GNN: Heterogeneous Dynamic Spatiotemporal Graph Neural Networks for Multi-Object Tracking in UAV Aerial Imagery
Pith reviewed 2026-06-28 02:44 UTC · model grok-4.3
The pith
HDST-GNN reduces identity switches in UAV multi-object tracking by adapting graph edges to altitude, using distinct node types, and gating aggregation by occlusion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
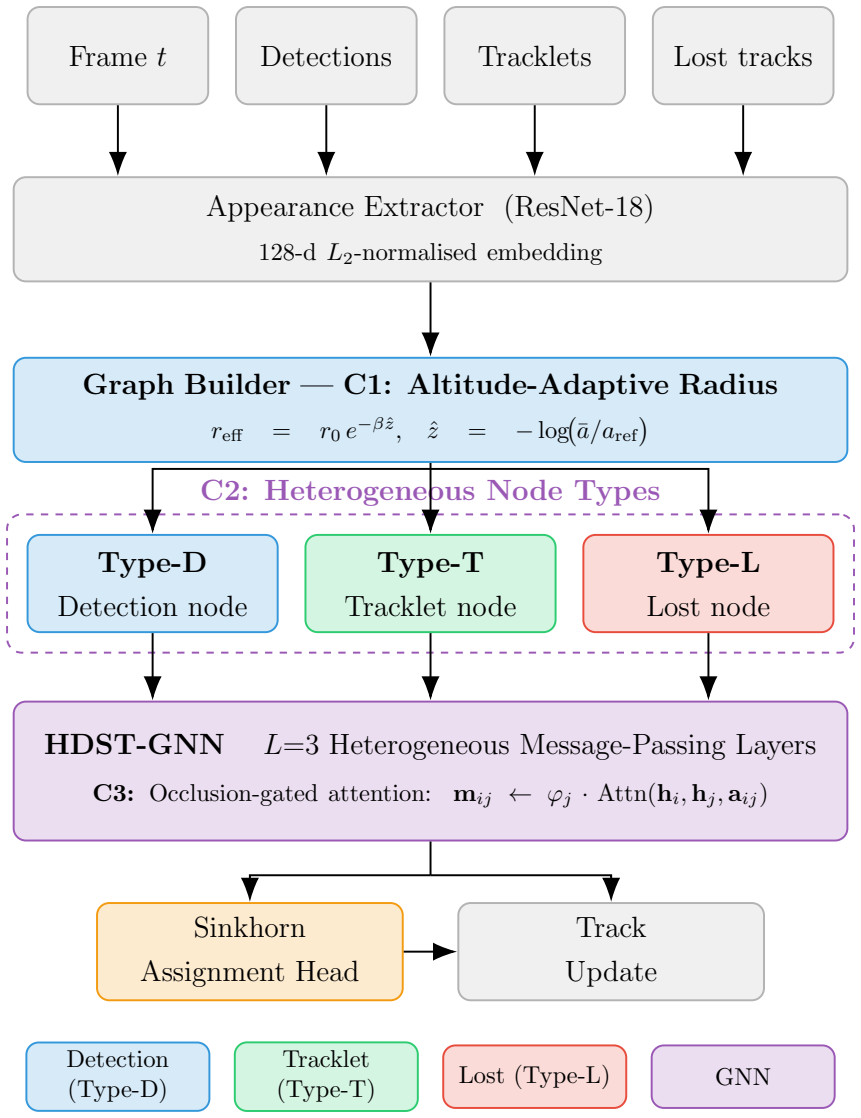
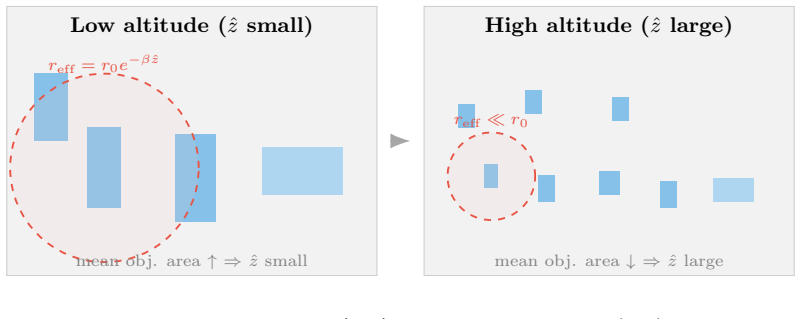
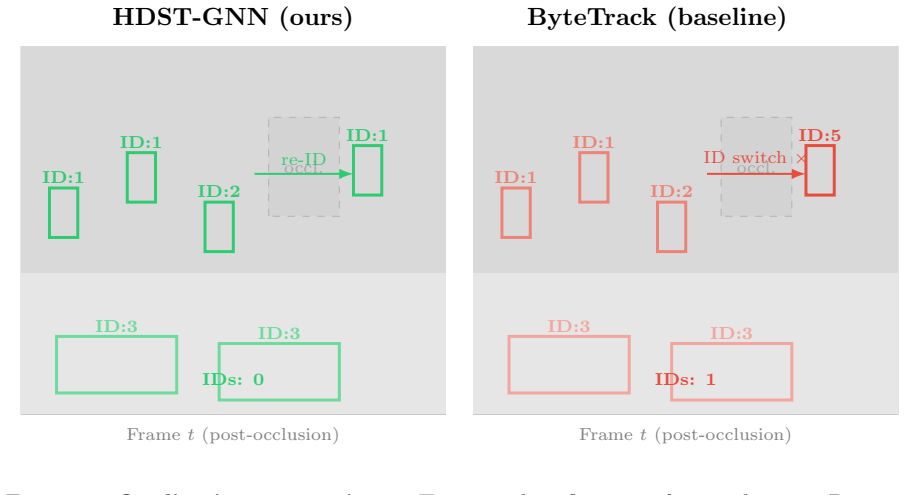
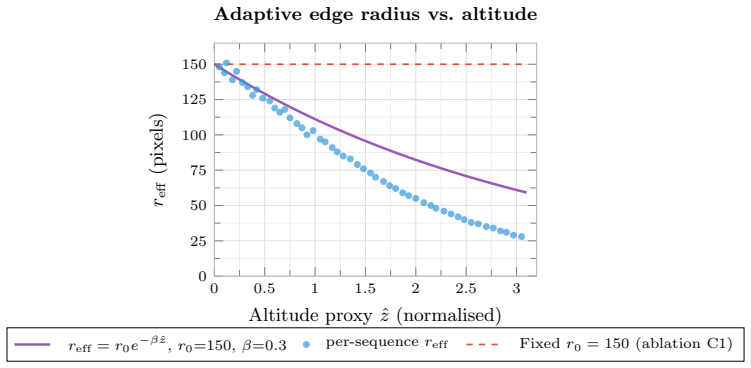
HDST-GNN is a heterogeneous dynamic spatiotemporal graph neural network whose altitude-adaptive edge construction estimates a camera-altitude proxy from mean object area to adjust connectivity radius, whose heterogeneous node representation models detections as Type-D, confirmed tracklets as Type-T, and lost tracklets as Type-L with dedicated projections and typed edge relations, and whose occlusion-gated temporal aggregation gates each node's attention contribution by occlusion confidence, yielding 94.51 percent MOTA and 97.24 percent IDF1 on VisDrone2019-MOT with oracle detections and reducing identity switches by 49 percent versus SORT with real detections.
What carries the argument
The three components of HDST-GNN: Altitude-Adaptive Edge Construction using mean object area as altitude proxy, Heterogeneous Node Representation with Type-D, Type-T and Type-L nodes and typed relations, and Occlusion-Gated Temporal Aggregation that modulates attention by occlusion confidence.
If this is right
- Altitude-adaptive edges allow the graph to maintain appropriate spatial context as UAV height changes across sequences.
- Heterogeneous node types and typed relations prevent uniform treatment of detections versus active and lost tracklets.
- Occlusion gating prevents corrupted embeddings from propagating through the temporal aggregation step.
- End-to-end training with the Sinkhorn head produces a fully differentiable association pipeline.
- Performance gains hold for both perfect oracle detections and noisy real detections from YOLOv8n.
Where Pith is reading between the lines
- The altitude proxy derived from object area could be replaced by direct metadata when available, potentially simplifying the model for calibrated cameras.
- The same node-type distinction and gating logic might transfer to ground-based tracking scenarios that also exhibit scale change and partial occlusion.
- Pairing HDST-GNN with a detector that outputs per-detection occlusion scores would remove the need to derive occlusion from other signals.
Load-bearing premise
The assumption that the three components each independently drive the reported gains, as asserted via ablation studies whose experimental controls are not described.
What would settle it
An ablation experiment on VisDrone2019-MOT in which disabling any one of the three components produces no measurable change in MOTA or identity-switch count would falsify the claim of independent contributions.
Figures
read the original abstract
Multi-object tracking (MOT) from UAV imagery presents unique challenges: altitude varies across sequences, objects are small and densely packed, and frequent occlusion causes identity switches. Existing graph-based trackers assume fixed spatial context and treat all objects uniformly, ignoring the heterogeneous lifecycle states of detections, active tracklets, and lost targets. We propose HDST-GNN, a Heterogeneous Dynamic Spatiotemporal Graph Neural Network with three novel contributions. First, Altitude-Adaptive Edge Construction estimates a camera-altitude proxy from mean object area and adjusts the graph connectivity radius accordingly. Second, Heterogeneous Node Representation models detections (Type-D), confirmed tracklets (Type-T), and lost tracklets (Type-L) as distinct node types with dedicated projections and typed edge relations. Third, Occlusion-Gated Temporal Aggregation gates each node's attention contribution by its occlusion confidence, preventing occluded nodes from corrupting neighbour embeddings. HDST-GNN is trained end-to-end with a differentiable Sinkhorn head using joint cross-entropy and triplet loss. On VisDrone2019-MOT with oracle detections, HDST-GNN achieves 94.51% MOTA and 97.24% IDF1, outperforming SORT by +5.0 MOTA points and reducing identity switches by 81%. With real YOLOv8n detections, HDST-GNN reduces identity switches by 49% vs. SORT. Ablation studies confirm the independent contribution of each component.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes HDST-GNN, a heterogeneous dynamic spatiotemporal graph neural network for multi-object tracking in UAV aerial imagery. It introduces three components: altitude-adaptive edge construction that estimates a camera-altitude proxy from mean object area to adjust graph connectivity radius; heterogeneous node representations distinguishing Type-D (detections), Type-T (confirmed tracklets), and Type-L (lost tracklets) with dedicated projections and typed relations; and occlusion-gated temporal aggregation that modulates attention by occlusion confidence. The model is trained end-to-end with a differentiable Sinkhorn head using joint cross-entropy and triplet loss. On VisDrone2019-MOT with oracle detections it reports 94.51% MOTA and 97.24% IDF1, outperforming SORT by +5.0 MOTA points and reducing identity switches by 81%; with YOLOv8n detections it reduces identity switches by 49%. Ablation studies are stated to confirm the independent contribution of each component.
Significance. If the reported gains hold under controlled evaluation, the targeted handling of altitude variation and occlusion via graph structure could advance UAV-specific MOT, particularly for dense small-object scenarios. The end-to-end differentiable Sinkhorn head is a methodological strength that enables joint optimization of embeddings and assignment.
major comments (1)
- [Abstract] Abstract: the statement that 'ablation studies confirm the independent contribution of each component' provides no protocol details (e.g., exact variants tested, metric deltas per component, or controls for parameter count and training schedule). This is load-bearing for the central claim that the +5.0 MOTA gain and 81% ID-switch reduction are attributable to altitude-adaptive edges, heterogeneous nodes, and occlusion gating rather than capacity or tuning differences.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the statement that 'ablation studies confirm the independent contribution of each component' provides no protocol details (e.g., exact variants tested, metric deltas per component, or controls for parameter count and training schedule). This is load-bearing for the central claim that the +5.0 MOTA gain and 81% ID-switch reduction are attributable to altitude-adaptive edges, heterogeneous nodes, and occlusion gating rather than capacity or tuning differences.
Authors: We agree that the abstract statement lacks the protocol details required to support the claim. The full ablation studies—including exact variants tested, per-component metric deltas, and controls for parameter count and training schedule—are reported in Section 4.3 of the manuscript. Given the length constraints of an abstract, we will revise the abstract to remove the sentence asserting that ablation studies confirm the independent contribution of each component. This change ensures the abstract contains only claims that can be fully substantiated within its text, while the attribution of gains remains supported by the detailed experiments in the body of the paper. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper describes an empirical GNN architecture for multi-object tracking, with three proposed components trained end-to-end using standard cross-entropy and triplet losses plus a differentiable Sinkhorn head. No mathematical derivation, equations, or first-principles chain is presented that could reduce to its own inputs by construction. Performance claims rest on reported metrics from VisDrone2019-MOT experiments rather than any self-referential fitting or self-citation load-bearing step. Absence of ablation protocol details is a methodological gap but does not create circularity under the defined patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- altitude proxy scaling factor
axioms (1)
- standard math The Sinkhorn algorithm can be used differentiably for assignment in tracking
invented entities (1)
-
Type-D, Type-T, Type-L node types
no independent evidence
Reference graph
Works this paper leans on
-
[1]
VisDrone-MOT2019: The Vision Meets Drone Multiple Object Tracking Challenge Results.ICCV Workshops2019
Zhu, P.; Wen, L.; Du, D.; Bian, X.; Ling, H.; Hu, Q.; Nie, J.; Cheng, H.; Liu, C.; Liu, X.; et al. VisDrone-MOT2019: The Vision Meets Drone Multiple Object Tracking Challenge Results.ICCV Workshops2019
-
[2]
VisDrone-DET2021: The Vision Meets Drone Object Detection Challenge Results.ICCV Workshops2021
Fan, H.; Ling, H. VisDrone-DET2021: The Vision Meets Drone Object Detection Challenge Results.ICCV Workshops2021
-
[3]
Simple Online and Realtime Tracking.ICIP2016, 3464–3468
Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple Online and Realtime Tracking.ICIP2016, 3464–3468
-
[4]
Simple Online and Realtime Tracking with a Deep Association Metric.ICIP2017, 3645–3649
Wojke, N.; Bewley, A.; Paulus, D. Simple Online and Realtime Tracking with a Deep Association Metric.ICIP2017, 3645–3649
-
[5]
ByteTrack: Multi-Object Tracking by Associating Every Detection Box.ECCV 2022, 1–21
Zhang, Y.; Sun, P.; Jiang, Y.; Yu, D.; Weng, F.; Yuan, Z.; Luo, P.; Liu, W.; Wang, X. ByteTrack: Multi-Object Tracking by Associating Every Detection Box.ECCV 2022, 1–21
2022
-
[6]
Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking.CVPR2023
Cao, J.; Pang, J.; Weng, X.; Khirodkar, R.; Kitani, K. Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking.CVPR2023
-
[7]
StrongSORT: Make DeepSORT Great Again.IEEE Trans
Du, Y.; Zhao, Z.; Song, Y.; Zhao, Y.; Su, F.; Gong, T.; Meng, H. StrongSORT: Make DeepSORT Great Again.IEEE Trans. Multimedia2023, 25, 8725–8737
-
[8]
Learning a Neural Solver for Multiple Object Tracking
Bras´ o, G.; Leal-Taix´ e, L. Learning a Neural Solver for Multiple Object Tracking. CVPR2020, 6247–6257
-
[9]
Papakis, I.; Sarkar, A.; Bhattacharyya, A. GCNNMatch: Graph Convolu- tional Neural Networks for Multi-Object Tracking via Sinkhorn Normalization. arXiv:2010.000672020
-
[10]
Towards Realtime Multi-Object Tracking.ECCV2020, 107–122
Wang, Z.; Zheng, L.; Liu, Y.; Li, Y.; Wang, S. Towards Realtime Multi-Object Tracking.ECCV2020, 107–122
-
[11]
TrackFormer: Multi- Object Tracking with Transformers.CVPR2022, 8844–8854
Meinhardt, T.; Kirillov, A.; Leal-Taix´ e, L.; Feichtenhofer, C. TrackFormer: Multi- Object Tracking with Transformers.CVPR2022, 8844–8854. 17
-
[12]
MOTR: End-to-End Multiple-Object Tracking with Transformer.ECCV2022, 145–161
Zeng, F.; Dong, B.; Zhang, Y.; Wang, T.; Zhang, X.; Wei, Y. MOTR: End-to-End Multiple-Object Tracking with Transformer.ECCV2022, 145–161
-
[13]
Ultralytics YOLO (Version 8.0.0).GitHub2023
Jocher, G.; Chaurasia, A.; Qiu, J. Ultralytics YOLO (Version 8.0.0).GitHub2023. Available online: https://github.com/ultralytics/ultralytics
-
[14]
Qian, H.; Sun, X.; Guo, R.; Su, S.; Ding, B.; Guo, X. Low-Altitude Multi-Object Tracking via Graph Neural Networks with Cross-Attention and Reliable Neighbor Guidance.Remote Sens.2025,17, 3502. https://doi.org/10.3390/rs17203502
-
[15]
SuperGlue: Learning Feature Matching with Graph Neural Networks.CVPR2020, 4938–4947
Sarlin, P.; DeTone, D.; Malisiewicz, T.; Rabinovich, A. SuperGlue: Learning Feature Matching with Graph Neural Networks.CVPR2020, 4938–4947
-
[16]
In Defense of the Triplet Loss for Person Re-Identification
Hermans, A.; Beyer, L.; Leibe, B. In Defense of the Triplet Loss for Person Re- Identification.arXiv:1703.077372017
work page internal anchor Pith review Pith/arXiv arXiv
-
[17]
Deep Residual Learning for Image Recognition
He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. CVPR2016, 770–778
-
[18]
Performance Measures and a Data Set for Multi-Target, Multi-Camera Tracking.ECCV Workshops2016, 17–35
Ristani, E.; Solera, F.; Zou, R.; Cucchiara, R.; Tomasi, C. Performance Measures and a Data Set for Multi-Target, Multi-Camera Tracking.ECCV Workshops2016, 17–35
-
[19]
HOTA: A Higher Order Metric for Evaluating Multi-Object Tracking.IJCV2021, 129, 548–578
Luiten, J.; Osep, A.; Dendorfer, P.; Torr, P.; Geiger, A.; Leal-Taix´ e, L.; Leibe, B. HOTA: A Higher Order Metric for Evaluating Multi-Object Tracking.IJCV2021, 129, 548–578
-
[20]
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks.NeurIPS2015, 91–99
Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks.NeurIPS2015, 91–99
-
[21]
YOLOv3: An Incremental Improvement
Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement.arXiv:1804.02767 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[22]
Feature Pyramid Networks for Object Detection.CVPR2017, 2117–2125
Lin, T.-Y.; Doll´ ar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection.CVPR2017, 2117–2125
-
[23]
Clustered Object Detection in Aerial Images.ICCV2019, 8311–8320
Yang, F.; Fan, H.; Chu, P.; Blasch, E.; Ling, H. Clustered Object Detection in Aerial Images.ICCV2019, 8311–8320
-
[24]
Finding Tiny Faces in the Wild with Generative Adversarial Network.CVPR2018, 21–30
Bai, Y.; Zhang, Y.; Ding, M.; Ghanem, B. Finding Tiny Faces in the Wild with Generative Adversarial Network.CVPR2018, 21–30
-
[25]
The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking.ECCV 2018, 375–391
Du, D.; Qi, Y.; Yu, H.; Yang, Y.; Duan, K.; Li, G.; Zhang, W.; Huang, Q.; Tian, Q. The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking.ECCV 2018, 375–391. 18
2018
-
[26]
Zheng, L.; Yang, Y.; Hauptmann, A. G. Person Re-Identification: Past, Present and Future.arXiv:1610.029842016. 19
work page internal anchor Pith review Pith/arXiv arXiv
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.