Nonlinear Mechanics and Predictable Bifurcation of Multi-Cell Kresling Origami Chains
Pith reviewed 2026-06-27 08:14 UTC · model grok-4.3
The pith
Treating creases in Kresling origami as axial rods allows prediction of equilibrium paths in multi-layer chains and inverse design via prescribed critical points.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By modeling crease lines as axial-load-carrying elements and applying bifurcation analysis, the equilibrium branches and instabilities of n-layer Kresling chains can be constructed predictively from geometric design variables, enabling inverse design of multi-layer meta-structures through prescribed critical points.
What carries the argument
The modeling of crease lines as axial-load-carrying elements combined with continuation and bifurcation analysis to track equilibrium branches in multi-layer chains.
If this is right
- Equilibrium paths for multi-layer chains can be built from single-layer responses.
- Post-critical behavior can be controlled by choosing specific critical points.
- Inverse design becomes possible for architected metamaterials with desired responses.
- Branch-point bifurcations and limit-point instabilities can be systematically identified.
Where Pith is reading between the lines
- Similar axial modeling might apply to other origami patterns with twist coupling.
- Experimental validation on physical prototypes could confirm the predicted paths.
- The approach could extend to dynamic loading or damping effects in metamaterials.
Load-bearing premise
Treating the crease lines simply as rods that carry only axial loads captures the full nonlinear behavior and all bifurcations in the chain.
What would settle it
If measurements on a fabricated three-layer Kresling chain show equilibrium paths or instability loads that differ significantly from the model's predictions, the approach would be falsified.
Figures
read the original abstract
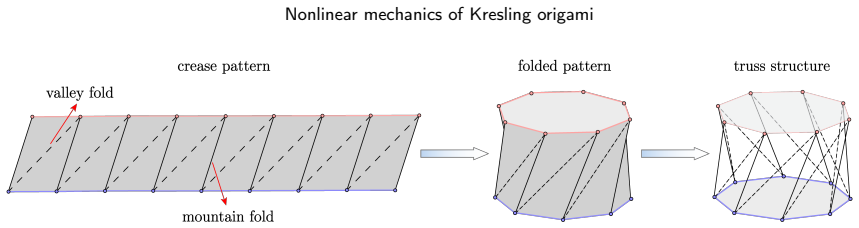
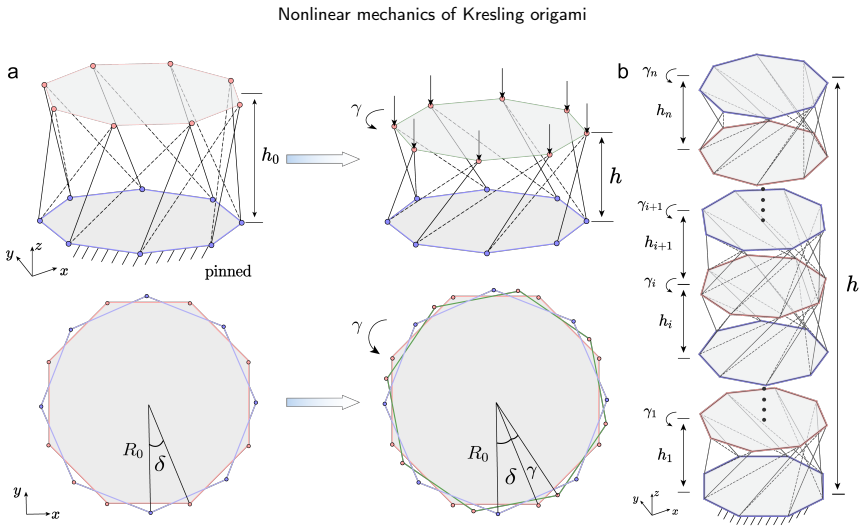
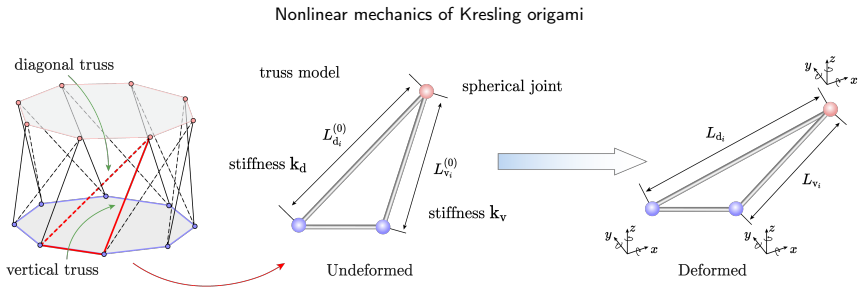
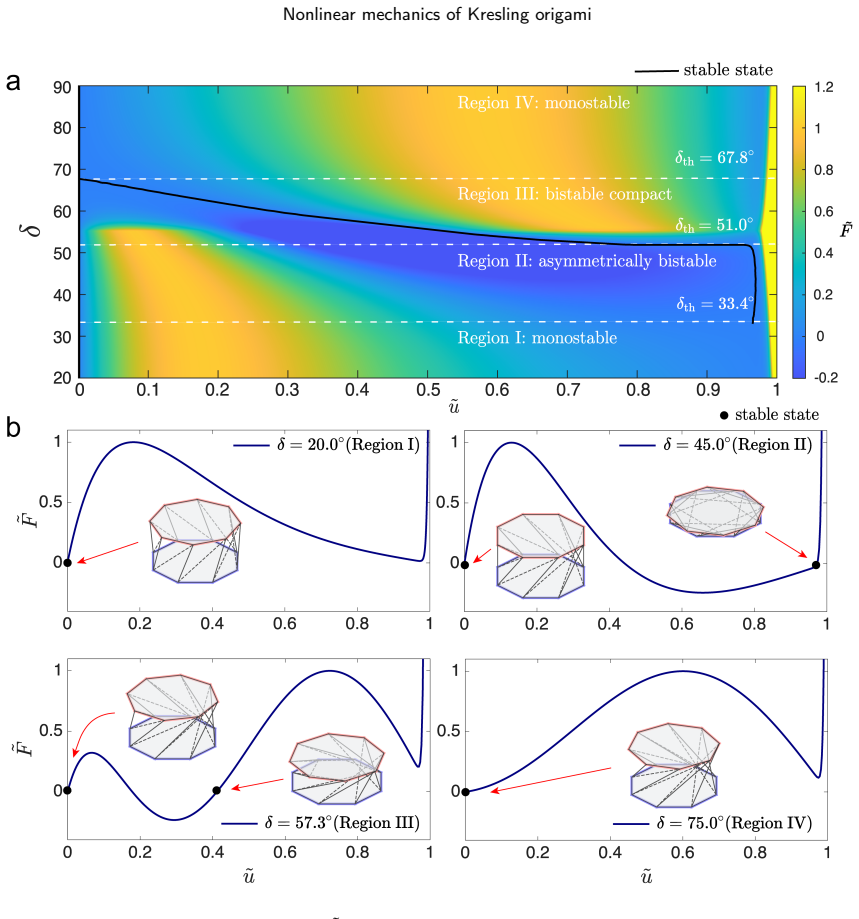
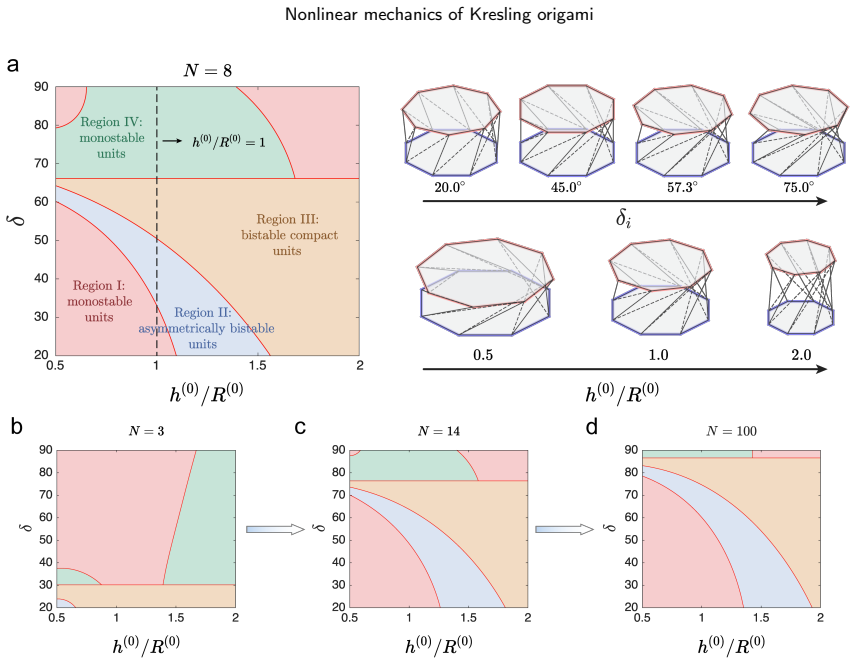
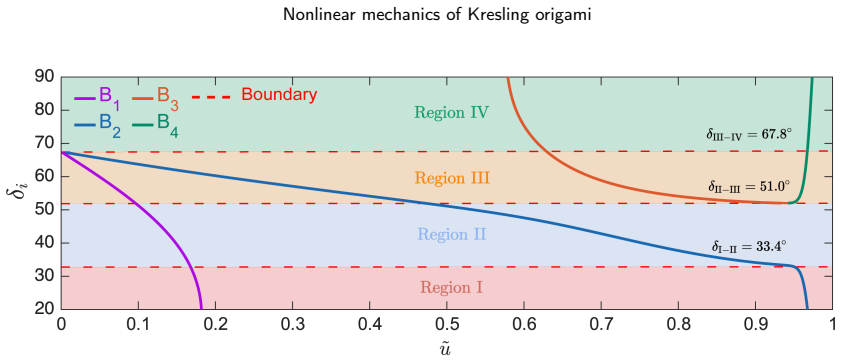
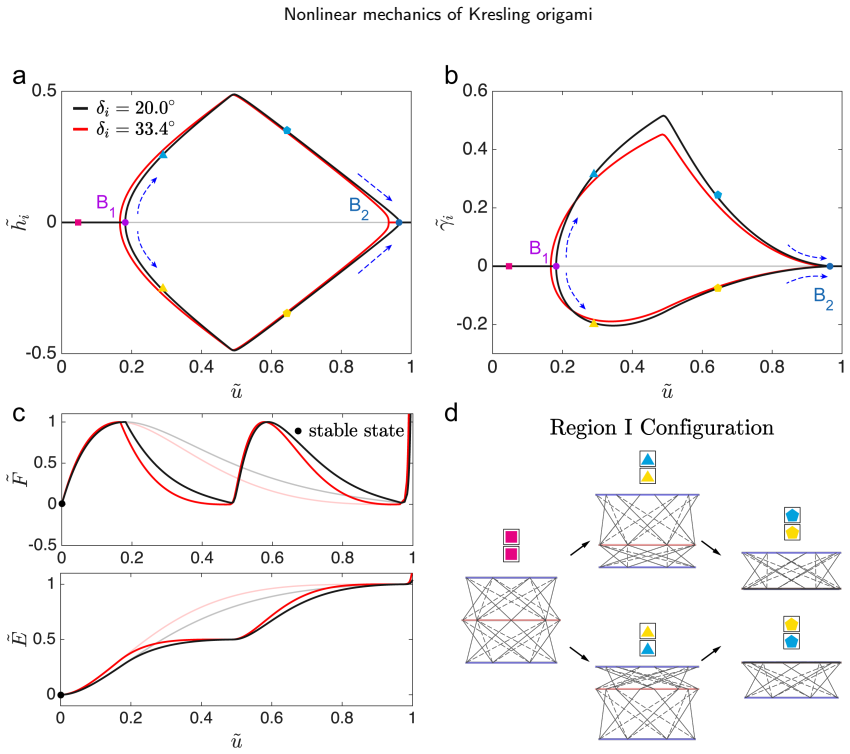
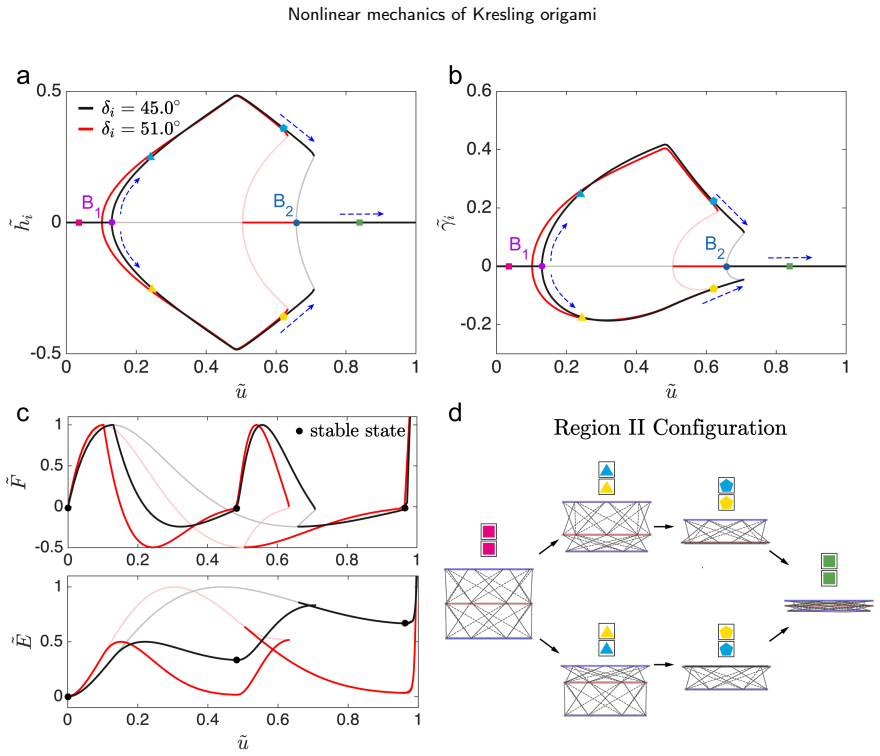
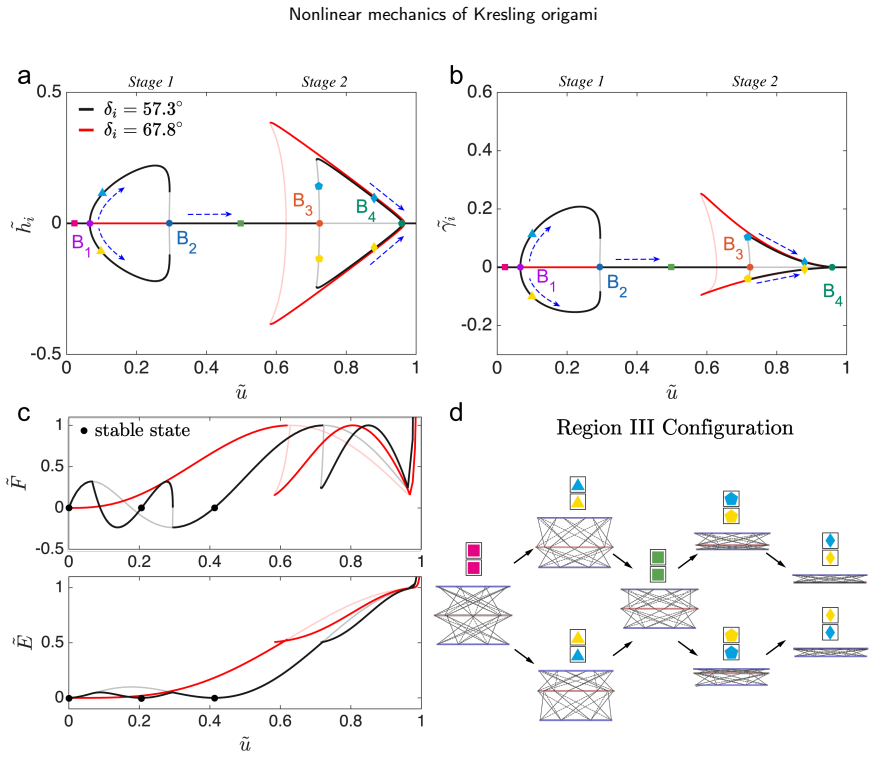
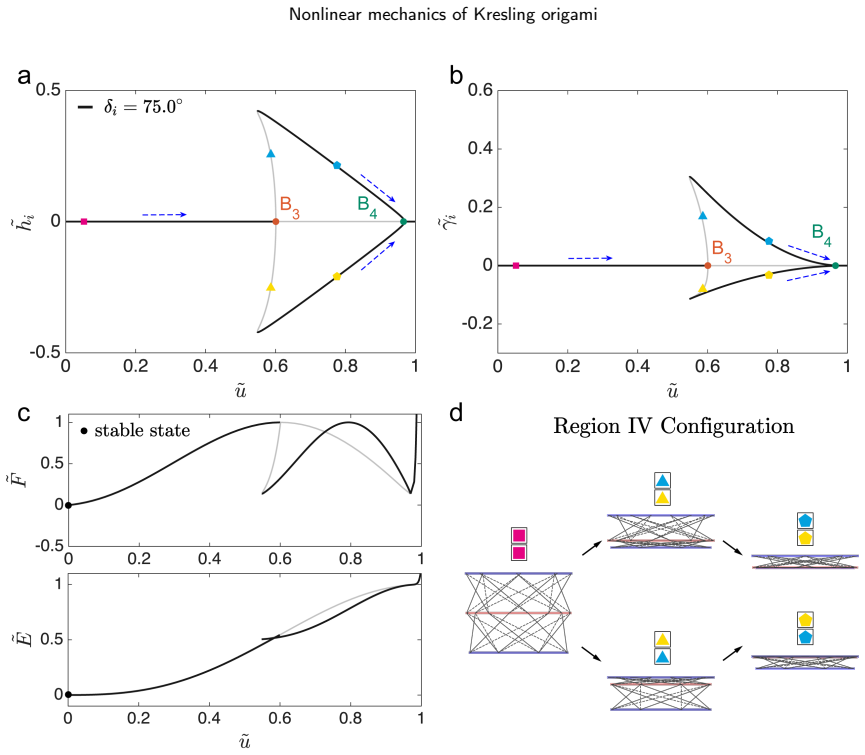
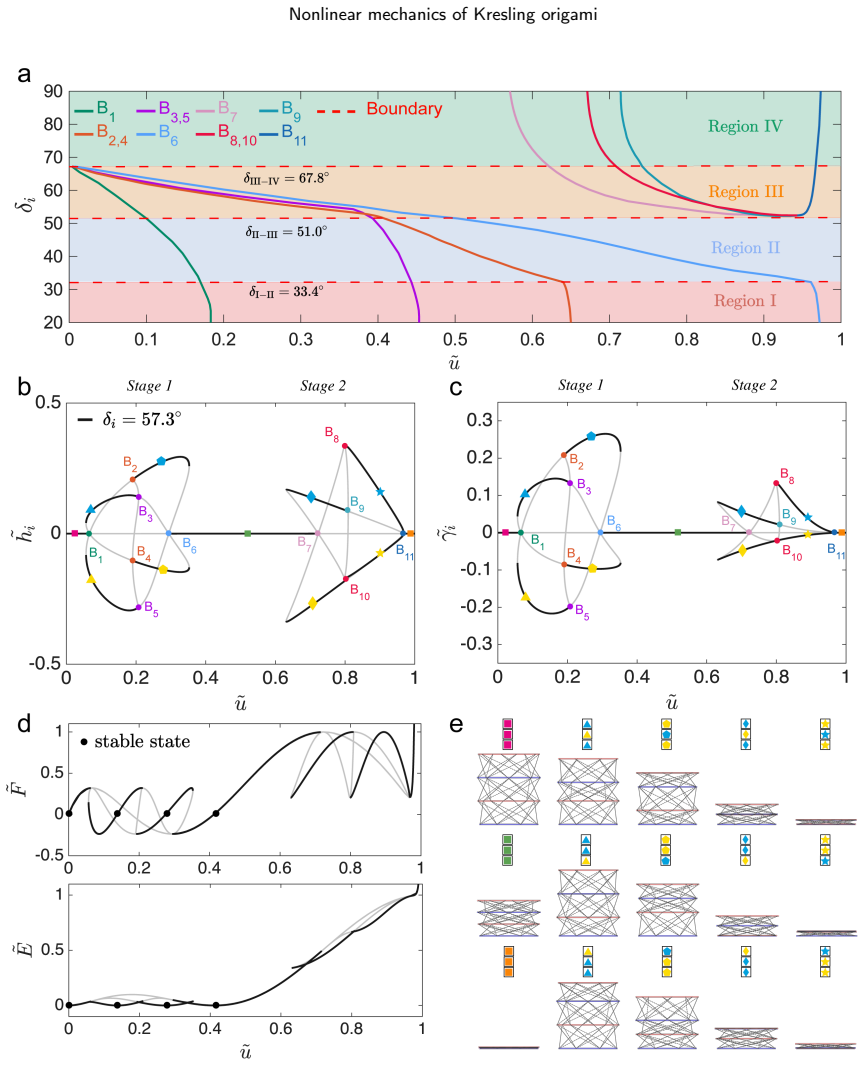
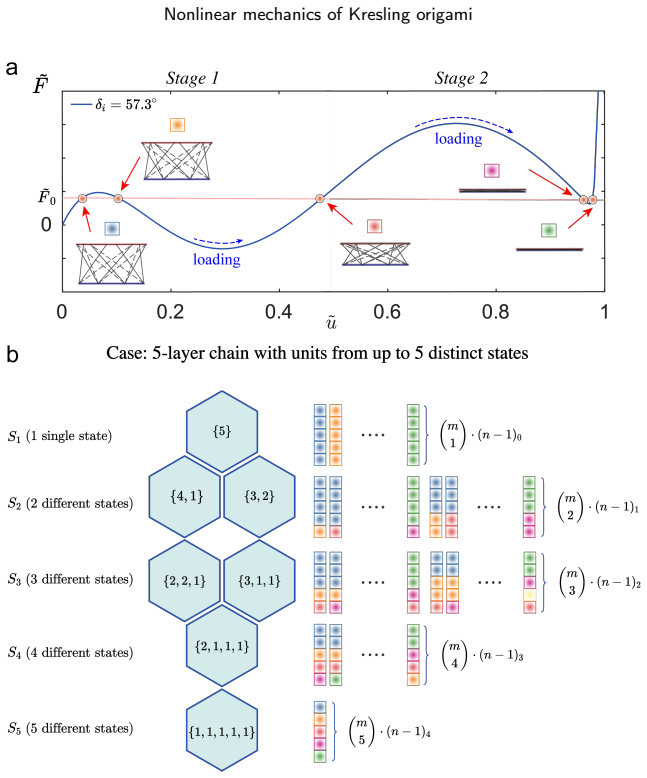
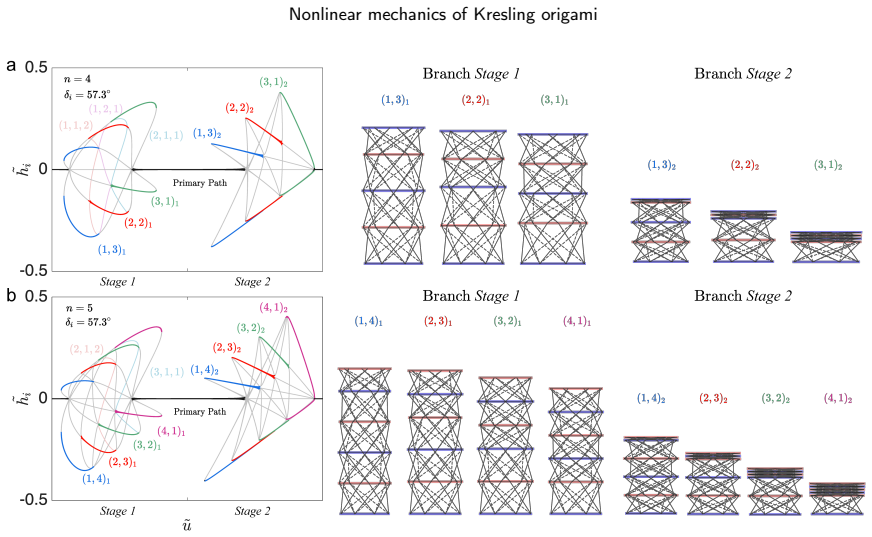
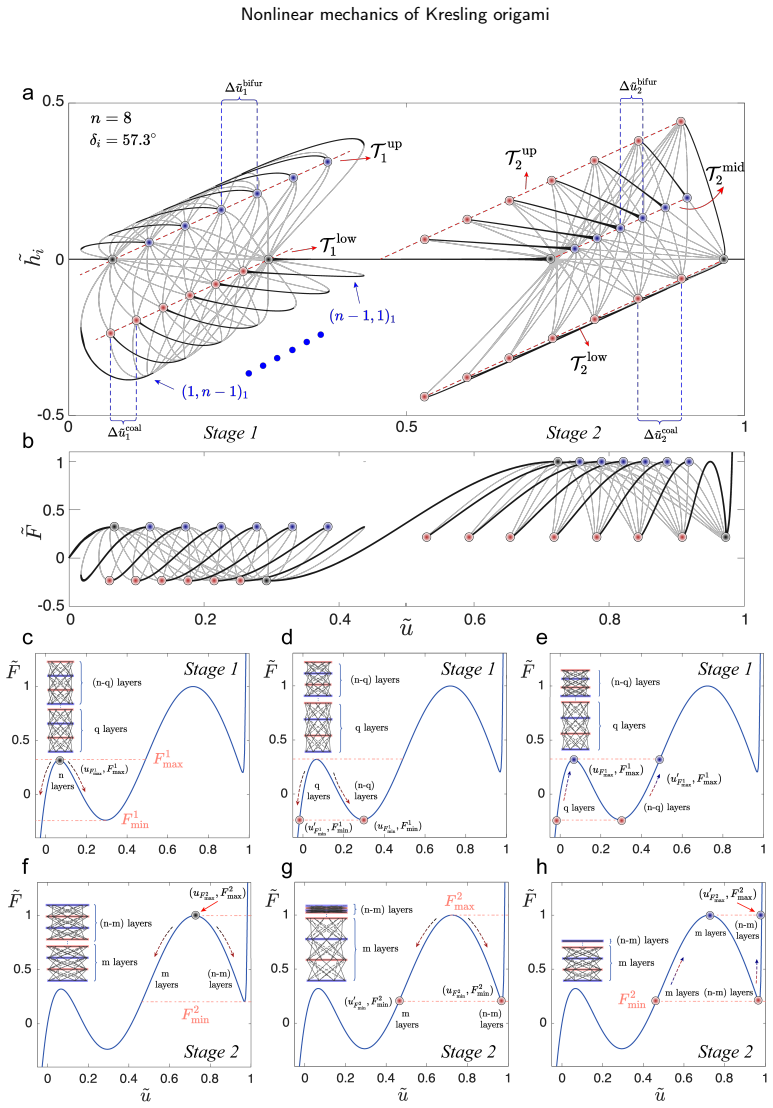
Meta-structures that display axial-twist coupling can be achieved through the emerging kinematics in Kresling origami patterns. A central challenge in these structures is understanding their nonlinear mechanical behaviour, specifically their equilibrium branches and bifurcation diagrams. This involves identifying relationships between desired responses and the geometric variables that define the design space, including the Kresling polygon count, initial twist angle, height, radius, and crease lengths. As the number of constituent units increases in an n-layer chain, we track complex equilibrium branches extending into the post-critical regime under successive instabilities, including branch-point bifurcations and limit-point instabilities. This work begins by establishing the relationship between the geometric design variables and the response curves of the assembled chain by modelling the crease lines as axial-load-carrying elements. Subsequently, equilibrium branches and instabilities are systematically investigated via continuation and bifurcation analysis, beginning with the single-layer system and progressively extending to two- and three-layer configurations. Finally, a generalisation strategy is proposed to extend these findings to an n-layer Kresling chain. This strategy enables the predictive construction of equilibrium paths and the inverse design of multi-layer meta-structures, using prescribed critical points to control post-critical behaviour. It provides a foundation for the inverse design and optimisation of architected mechanical metamaterials with programmable responses.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper models Kresling origami crease lines as axial-load-carrying truss elements and employs numerical continuation and bifurcation analysis to trace equilibrium branches and instabilities (branch points and limit points) in single-, two-, and three-layer chains. It then proposes a generalization strategy to construct equilibrium paths for arbitrary n-layer chains and to perform inverse design by prescribing critical points that control post-critical behavior.
Significance. If the axial-truss idealization is shown to reproduce the correct instability sequence and post-critical paths, the generalization and inverse-design procedure would supply a practical route to programmable multi-layer origami metamaterials. The work would then strengthen the link between geometric parameters (polygon count, twist angle, crease lengths) and predictable nonlinear responses.
major comments (2)
- [Modeling section] Modeling section (crease idealization): representing creases exclusively as axial truss elements omits rotational stiffness and panel rigidity. Because the central claim is that this model enables predictive construction of equilibrium paths and inverse design via prescribed critical points, the absence of any comparison to beam/shell models or experiments leaves the bifurcation structure and post-critical branches unvalidated; this is load-bearing for the n-layer generalization.
- [Generalization strategy] Generalization strategy (final section): the procedure for extending 1–3 layer results to arbitrary n is presented without an explicit statement of the inductive assumptions or a verification that the critical-point prescription remains consistent when layer interactions accumulate; this directly affects the inverse-design claim.
minor comments (2)
- [Abstract] The abstract states that geometric variables include “Kresling polygon count, initial twist angle, height, radius, and crease lengths,” yet the precise mapping from these variables to the truss-element stiffness matrix is not summarized; a short table or equation reference would improve readability.
- [Notation] Notation for the continuation parameters and bifurcation detection criteria should be introduced once and used consistently; several symbols appear without prior definition in the provided abstract.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate the planned revisions.
read point-by-point responses
-
Referee: [Modeling section] Modeling section (crease idealization): representing creases exclusively as axial truss elements omits rotational stiffness and panel rigidity. Because the central claim is that this model enables predictive construction of equilibrium paths and inverse design via prescribed critical points, the absence of any comparison to beam/shell models or experiments leaves the bifurcation structure and post-critical branches unvalidated; this is load-bearing for the n-layer generalization.
Authors: We agree that the axial-truss idealization omits rotational stiffness and panel rigidity. This choice enables the continuation-based bifurcation analysis that underpins the n-layer generalization. In revision we will expand the modeling section to state these assumptions explicitly, discuss their implications for the predicted instability sequence, and cite relevant beam- and shell-based studies on Kresling origami. A full comparative validation study lies outside the present scope, but the added discussion will clarify the domain of applicability of the reported bifurcation structure. revision: partial
-
Referee: [Generalization strategy] Generalization strategy (final section): the procedure for extending 1–3 layer results to arbitrary n is presented without an explicit statement of the inductive assumptions or a verification that the critical-point prescription remains consistent when layer interactions accumulate; this directly affects the inverse-design claim.
Authors: We accept this criticism. The revised manuscript will include an explicit statement of the inductive assumptions used to extend the 1–3 layer results to arbitrary n. We will also add a short verification subsection confirming that the prescribed critical-point construction remains consistent when interlayer interactions accumulate, thereby strengthening the inverse-design procedure. revision: yes
Circularity Check
No circularity: derivation uses independent numerical continuation on truss model
full rationale
The provided abstract and excerpts describe an axial-truss idealization of creases, followed by standard continuation/bifurcation analysis on 1-3 layers and a generalization to n layers for inverse design via prescribed critical points. No equations, self-citations, or fitted-parameter steps are quoted that would reduce any reported equilibrium path or bifurcation to a tautology by construction. The modeling choice and numerical method are presented as external to the target predictions; the central claim therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Crease lines can be modeled as axial-load-carrying elements whose force-length response fully determines the chain equilibrium.
Reference graph
Works this paper leans on
-
[1]
P. M. Reis, A perspective on the revival of structural (in) stability with novel opportunities for function: From buckliphobia to buckliphilia, Journal of Applied Mechanics 82 (2015) 111001
2015
-
[2]
A. R. Champneys, T. J. Dodwell, R. M. Groh, G. W. Hunt, R. M. Neville, A. Pirrera, A. H. Sakhaei, M. Schenk, M. A. Wadee, Happy catastrophe: recent progress in analysis and exploitation of elastic instability, Frontiers in Applied Mathematics and Statistics 5 (2019) 34
2019
-
[3]
Frenzel, M
T. Frenzel, M. Kadic, M. Wegener, Three-dimensional mechanical metamaterials with a twist, Science 358 (2017) 1072–1074
2017
-
[4]
A.Reid,F.Lechenault,S.Rica,M.Adda-Bedia, Geometryanddesignoforigamibellowswithtunableresponse, PhysicalReviewE95(2017) 013002
2017
-
[5]
Oster, M
M. Oster, M. A. Dias, T. de Wolff, M. E. Evans, Reentrant tensegrity: A three-periodic, chiral, tensegrity structure that is auxetic, Science advances 7 (2021) eabj6737
2021
-
[6]
X.Liu,K.Zhang,H.Shi,F.Hong,H.Liu,Z.Deng, Origami-inspiredmetamaterialwithcompression–twistcouplingeffectforlow-frequency vibration isolation, Mechanical Systems and Signal Processing 208 (2024) 111076
2024
-
[7]
B.Kresling,J.F.Abel,etal., Naturaltwistbucklinginshells:fromthehawkmoth’sbellowstothedeployablekresling-patternandcylindrical miura-ori, in: Proceedings of the 6th international conference on computation of shell and spatial structures, volume 11, International Association for Shell and Spatial Structures, Ithaca, NY, 2008, pp. 12–32
2008
-
[8]
Kidambi, K
N. Kidambi, K. W. Wang, Dynamics of kresling origami deployment, Phys. Rev. E 101 (2020) 063003
2020
-
[9]
X. Wang, H. Qu, S. Guo, Tristable property and the high stiffness analysis of kresling pattern origami, International Journal of Mechanical Sciences 256 (2023) 108515
2023
-
[10]
Z. Wo, E. T. Filipov, Stiffening multi-stable origami tubes by outward popping of creases, Extreme Mechanics Letters 58 (2023) 101941
2023
-
[11]
Meloni,J
M. Meloni,J. Cai, Q.Zhang, D. Sang-HoonLee, M.Li, R. Ma,T. E. Parashkevov,J. Feng, Engineering origami: Acomprehensive reviewof recent applications, design methods, and tools, Advanced Science 8 (2021) 2000636
2021
-
[12]
M. Yang, J. Defillion, F. Scarpa, M. Schenk, Volume optimisation of multi-stable origami bellows for deployable space habitats, Acta Mechanica Solida Sinica 36 (2023) 514–530. Yue,et al.:Preprint submitted to ElsevierPage 23 of 24 Nonlinear mechanics of Kresling origami
2023
-
[13]
Z. Li, N. Kidambi, L. Wang, K.-W. Wang, Uncovering rotational multifunctionalities of coupled kresling modular structures, Extreme Mechanics Letters 39 (2020) 100795
2020
-
[14]
L. Lu, X. Dang, F. Feng, P. Lv, H. Duan, Conical kresling origami and its applications to curvature and energy programming, Proceedings of the Royal Society A 478 (2022) 20210712
2022
-
[15]
Jiang, D
C. Jiang, D. Wang, P. Cheng, L. Qiu, C. Li, Design and optimization of a novel multi-layer conical kresling origami mechanism (mckom) for linear actuation, Mechanism and Machine Theory 203 (2024) 105796
2024
-
[16]
Zhang, S
Q. Zhang, S. Rudykh, Propagation of solitary waves in origami-inspired metamaterials, Journal of the Mechanics and Physics of Solids 187 (2024) 105626
2024
-
[17]
T.Zhao,X.Dang,K.Manos,S.Zang,J.Mandal,M.Chen,G.H.Paulino, Modularchiralorigamimetamaterials, Nature640(2025)931–940
2025
-
[18]
R.Groh,D.Avitabile,A.Pirrera, Generalisedpath-followingforwell-behavednonlinearstructures, ComputerMethodsinAppliedMechanics and Engineering 331 (2018) 394–426
2018
-
[19]
K. Liu, G. H. Paulino, Nonlinear mechanics of non-rigid origami: an efficient computational approach<sup>†</sup>, Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 473 (2017) 20170348
2017
-
[20]
S. Zang, D. Misseroni, T. Zhao, G. H. Paulino, Kresling origami mechanics explained: Experiments and theory, Journal of the Mechanics and Physics of Solids 188 (2024) 105630
2024
-
[21]
Z. Y. Wei, Z. V. Guo, L. Dudte, H. Y. Liang, L. Mahadevan, Geometric mechanics of periodic pleated origami, Phys. Rev. Lett. 110 (2013) 215501
2013
-
[22]
Filipov, K
E. Filipov, K. Liu, T. Tachi, M. Schenk, G. Paulino, Bar and hinge models for scalable analysis of origami, International Journal of Solids and Structures 124 (2017) 26–45
2017
-
[23]
A.Pagano,T.Yan,B.Chien,A.Wissa,S.Tawfick, Acrawlingrobotdrivenbymulti-stableorigami, SmartMaterialsandStructures26(2017) 094007
2017
-
[24]
Jianguo, D
C. Jianguo, D. Xiaowei, Z. Ya, F. Jian, T. Yongming, Bistable behavior of the cylindrical origami structure with kresling pattern, Journal of Mechanical Design 137 (2015) 061406
2015
-
[25]
E. J. Doedel, A. R. Champneys, F. Dercole, T. F. Fairgrieve, Y. A. Kuznetsov, B. Oldeman, R. Paffenroth, B. Sandstede, X. Wang, C. Zhang, Auto-07p: Continuation and bifurcation software for ordinary differential equations, (2007)
2007
-
[26]
Mofatteh, B
H. Mofatteh, B. Shahryari, A. Mirabolghasemi, A. Seyedkanani, R. Shirzadkhani, G. Desharnais, A. Akbarzadeh, Programming multistable metamaterials to discover latent functionalities, Advanced Science 9 (2022) 2202883
2022
-
[27]
J. Nocedal, S. J. Wright, Theory of Constrained Optimization, Springer New York, New York, NY, 2006, pp. 304–354. URL:https: //doi.org/10.1007/978-0-387-40065-5_12. doi:10.1007/978-0-387-40065-5_12. Yue,et al.:Preprint submitted to ElsevierPage 24 of 24
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.