REVIEW 2 major objections 4 minor 2 cited by
Abstain mid-generation when expected reward falls below a fallback threshold, and you strictly beat fixed-position and no-abstention policies.
Reviewed by Pith at T0; open to challenge. T0 means a machine referee read the full paper against a public rubric. the ladder, T0–T4 →
T0 review · grok-4.5
2026-07-12 18:57 UTC pith:U62UDQVY
load-bearing objection Clean RL framing of mid-generation abstention with real dominance proofs and a cheap probe that beats the usual baselines on math and toxicity. the 2 major comments →
Knowing When to Quit: A Principled Framework for Dynamic Abstention in LLM Reasoning
The pith
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Dynamic value-thresholding—abstaining exactly when the value function of the current prefix falls below a fixed abstention reward—strictly dominates the base policy without abstention and every fixed-position value-thresholding baseline under general conditions, and is optimal among all abstention-augmented policies when the base policy is optimal and KL regularization is zero.
What carries the argument
Dynamic value-thresholding (the policy that abstains at a state if and only if its value falls below the abstention reward r_⊥). Value dominance of this policy over both the fallback reward and the base policy’s value is the engine of all subsequent dominance and optimality theorems.
Load-bearing premise
All dominance and optimality theorems assume the true value function is known; the practical method replaces it with a probe whose correctness rests on an unverified realizability assumption.
What would settle it
On a held-out math or toxicity set, replace the probe with an oracle that returns true correctness probability at every prefix; if dynamic value-thresholding then fails to dominate the best fixed-position and input-only baselines at matched abstention rates, the central claim is false.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
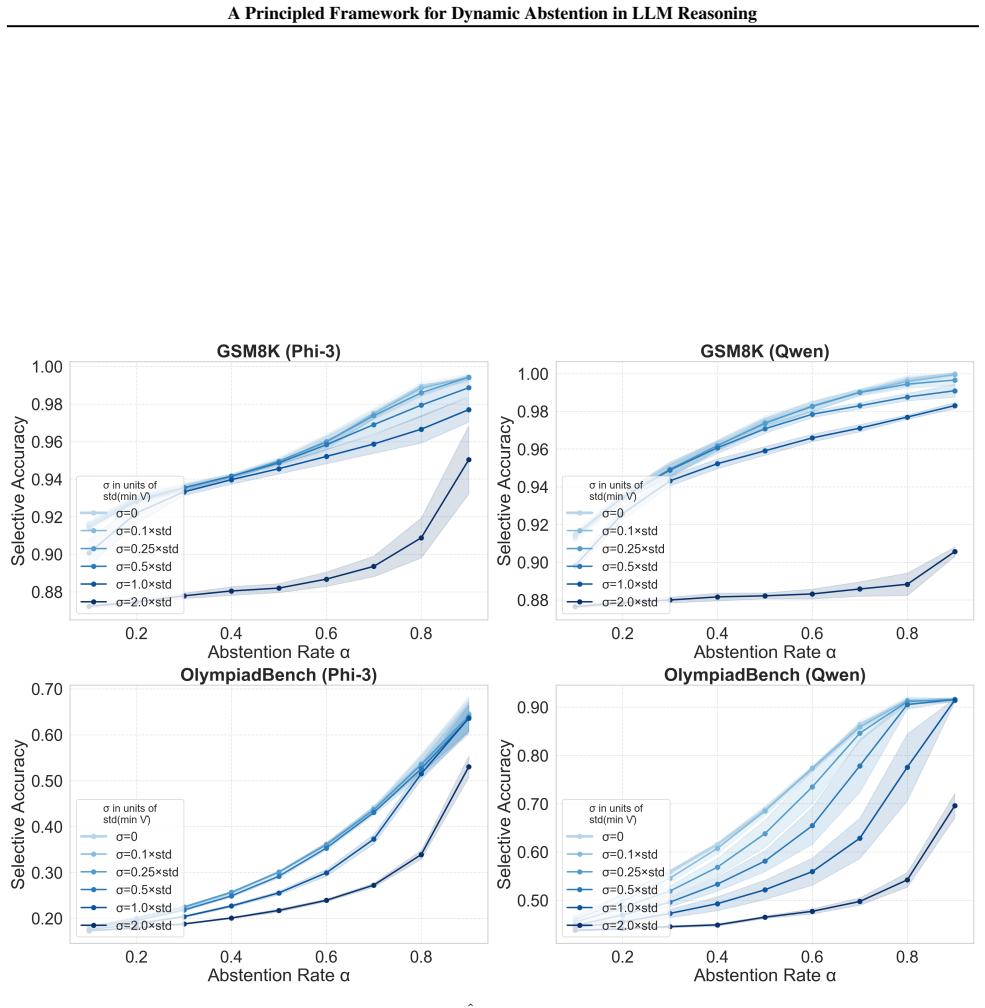
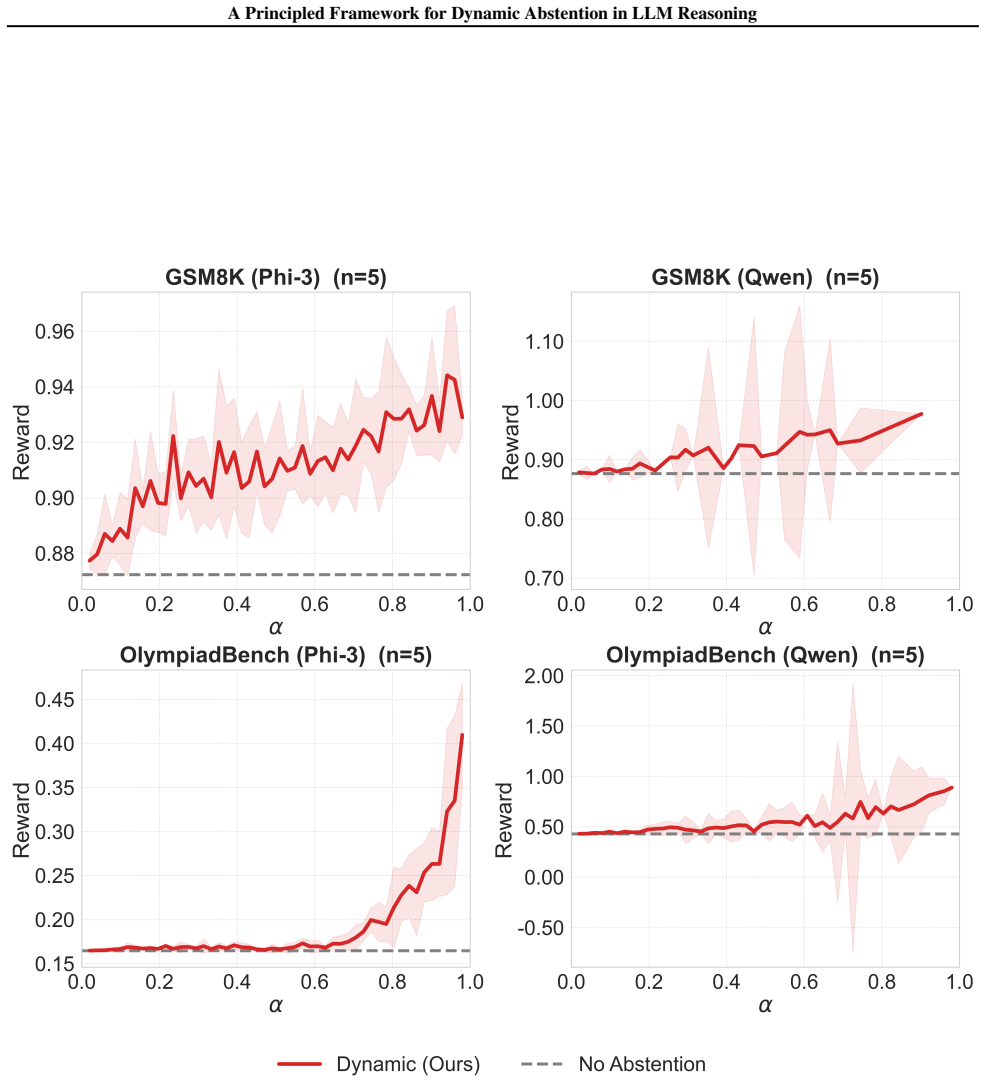
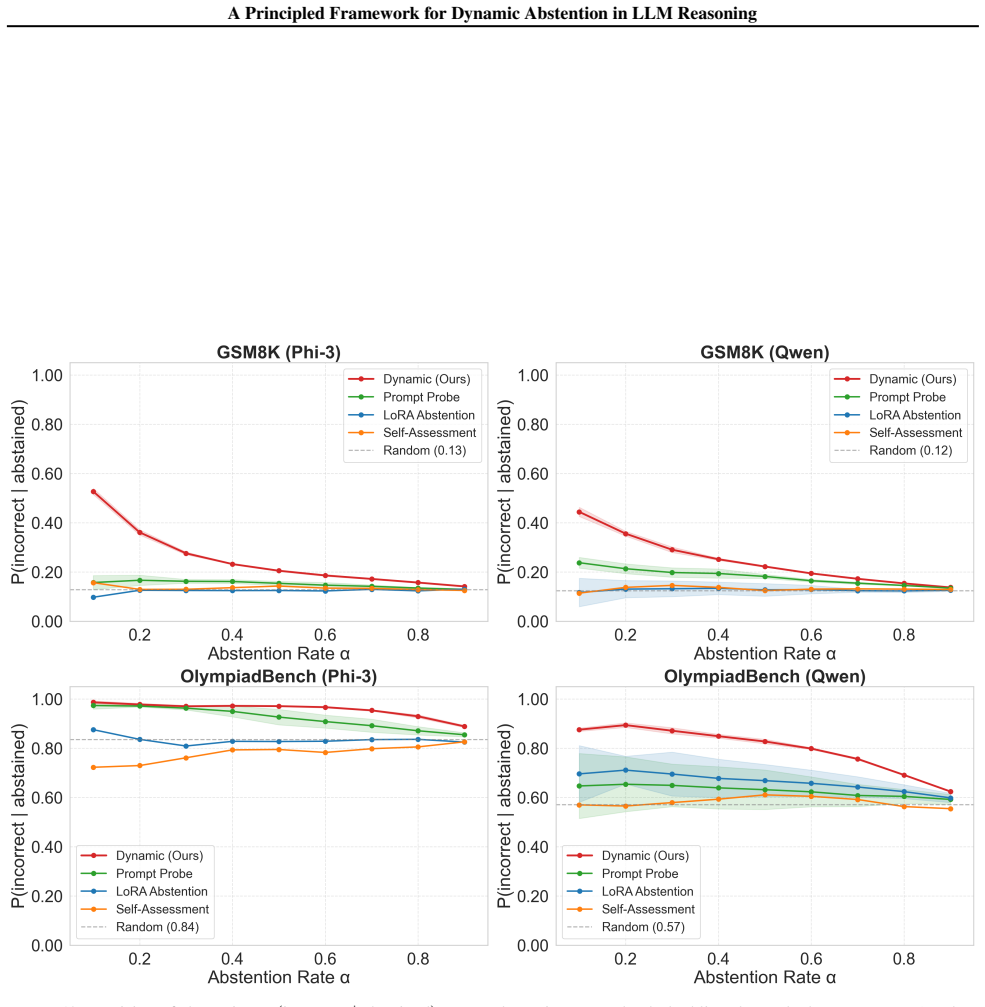
Summary. The paper models mid-generation abstention for chain-of-thought LLMs as an explicit action in a KL-regularized MDP with sparse binary rewards. It introduces dynamic value-thresholding: at each token, abstain if the state value falls below a tunable abstention reward r_⊥. Under an oracle value function, the rule is shown to dominate the base policy (Prop. 4.2) and fixed-position value-thresholding (Prop. 4.4 and Cor. 4.5–4.6); when the base policy is optimal and KL regularization is zero it is optimal among all abstention-enabled policies (Prop. 4.7). A linear improvement bound under Lipschitz continuity is also given (Prop. 4.9). Value estimation is reduced to binary classification of eventual correctness and implemented by a two-layer MLP probe on final-layer hidden states, with a realizability guarantee (Prop. B.2). Experiments on Qwen2.5-7B and Phi-3 across GSM8K, OlympiadBench, and RealToxicityPrompts show higher selective accuracy than input-processing and fixed-position baselines, with supporting checks on calibration, cross-dataset transfer, and noise robustness.
Significance. The contribution is a clean, Bellman-derived decision rule for dynamic abstention together with complete inductive proofs (Appendix B) that place earlier empirical early-exit heuristics on firmer ground. The free parameter r_⊥ has a direct interpretation as fallback utility and gives practitioners explicit control of the accuracy–compute frontier. The probe is lightweight, the code is released, and the empirical suite (two models, two math benchmarks plus toxicity, multi-seed, transfer and noise checks) is unusually thorough for the area. If the practical gap between oracle and estimated value remains manageable—as the reported selective-accuracy and robustness results suggest—the framework is immediately usable for compute-aware deployment of reasoning models.
major comments (2)
- Section 4 (Props. 4.2, 4.4, 4.7, Cor. 4.5–4.6) establishes dominance and optimality only under an oracle value function. The deployed method replaces V by a two-layer MLP probe whose recovery of the true value rests on the realizability assumption of Prop. B.2 (Appendix B.7). While Section 6.4 and Appendix G supply empirical evidence that ranking quality is sufficient for selective-accuracy gains, the manuscript never quantifies how large a ranking or calibration error would be needed to reverse the claimed dominance. A short formal or empirical sensitivity bound (e.g., maximum ranking inversion rate that preserves Prop. 4.2) would close this load-bearing gap between theory and practice.
- Proposition 4.7 (optimality) and the linear bound of Proposition 4.9 both require zero KL regularization (η = 0). The base models used in Section 6 were trained with KL regularization, so the optimality claim does not apply to them. The paper should either (i) state clearly that the optimality result is an idealized benchmark rather than a claim about the evaluated models, or (ii) supply a short argument or experiment showing that the same qualitative ranking of methods persists under the non-zero-η training regime actually used.
minor comments (4)
- Figure 2 and the surrounding text report selective accuracy and relative token savings, but the absolute token counts (or mean τ) are deferred to Appendix F. Adding a compact absolute-savings panel or table in the main text would make the efficiency claim self-contained.
- The fixed-position baseline index k is chosen as 20 for GSM8K and 100 for OlympiadBench (Section 6). Appendix K acknowledges the arbitrariness; a one-sentence pointer in the main text would help readers who do not consult the appendix.
- Notation for the abstention-stripped policy s(π†) appears in Eq. (4) without an immediate definition; the definition is given a few lines later. Moving the definition earlier would improve readability.
- In Appendix D the isotonic recalibration of r̂_⊥ is performed separately per threshold; a brief remark on whether a single global isotonic map would change the qualitative ordering of methods would be useful.
Circularity Check
No significant circularity: dominance/optimality follow from Bellman construction on an independently defined value function; empirical thresholds are quantiles, not fits that force the claims.
full rationale
The core derivation begins from the sparse-reward KL-regularized MDP (Eqs. 1–3), augments the action space with an abstention token carrying fixed reward r_⊥ (Eq. 4), and obtains the necessary local optimality condition by linearity of the value function (Eq. 7). The circular dependence of that condition on the augmented policy is resolved by the explicit construction of dynamic value-thresholding (Eq. 8), which thresholds the base policy’s value; Lemma 4.1 then proves value dominance by backward induction, and Propositions 4.2, 4.4, 4.7 and 4.9 follow by direct comparison of expectations under the common trajectory measure of the base policy. None of these steps define the value function in terms of the threshold or fit a free parameter to the claimed dominance. Value estimation (Section 5, Prop. B.2) recovers the conditional success probability under a standard realizability assumption via parallel BCE; the assumption is stated openly and is not used to force the theoretical claims. Empirical thresholds are quantiles of the probe on held-out data (Section 6.4, App. E), and post-hoc isotonic calibration (App. D) is used only for reporting the reward objective, not for the decision rule itself. No self-citation supplies a uniqueness theorem or ansatz that the present arguments rely upon. The derivation chain is therefore self-contained against its own inputs.
Axiom & Free-Parameter Ledger
free parameters (4)
- r_⊥ (abstention reward / fallback utility)
- α (probe threshold for target abstention rate)
- k (fixed-position baseline token index)
- MLP probe architecture and training hyperparameters
axioms (5)
- domain assumption Text generation is an MDP with sparse terminal reward equal to binary correctness (or non-toxicity) plus optional KL penalty.
- standard math Bellman’s principle of optimality applies to the augmented abstention MDP, so local value comparison yields a globally optimal abstention rule.
- ad hoc to paper Realizability: the true value function lies in the hypothesis class of the MLP probe (or MSE regressor).
- domain assumption For optimality (Prop. 4.7) the base policy is optimal under zero KL regularization.
- domain assumption Value function is L-Lipschitz in the token sequence for the linear improvement bound.
invented entities (2)
-
Dynamic value-thresholding policy π†_V (abstain iff V_β < r_⊥)
independent evidence
-
Abstention token ⊥ with fixed reward r_⊥
independent evidence
Cite this review
Pith. "Pith review of Knowing When to Quit: A Principled Framework for Dynamic Abstention in LLM Reasoning." pith.science (2026). https://pith.science/paper/U62UDQVY
@misc{pith2026260418419,
author = {Pith},
title = {Pith review of: Knowing When to Quit: A Principled Framework for Dynamic Abstention in LLM Reasoning},
year = {2026},
howpublished = {\url{https://pith.science/paper/U62UDQVY}},
note = {Machine review of arXiv:2604.18419}
}
read the original abstract
LLMs utilizing chain-of-thought reasoning often waste substantial compute by producing long, incorrect responses. Abstention can mitigate this by withholding outputs unlikely to be correct. While most abstention methods decide to withhold outputs before or after generation, dynamic mid-generation abstention considers early termination of unpromising reasoning traces at each token position. Prior work has explored empirical variants of this idea, but principled guidance for the abstention rule remains lacking. We present a formal analysis of dynamic abstention for LLMs, modeling abstention as an explicit action within a regularized reinforcement learning framework. An abstention reward parameter controls the trade-off between compute and information. We show that abstaining when the value function falls below this reward strictly outperforms natural baselines under general conditions. We further derive a principled and efficient method to approximate the value function. Empirical results on mathematical reasoning and toxicity avoidance tasks support our theory and demonstrate improved selective accuracy over existing methods.
Figures








Forward citations
Cited by 2 Pith papers
-
Doomed from the Start: Early Abort of LLM Agent Episodes via a Recall-Controlled Probe Cascade
A cascade of recall-calibrated gates on LLM agent hidden states aborts doomed episodes early, saving up to 47% compute at a 90% global success-recall target.
-
Doomed from the Start: Early Abort of LLM Agent Episodes via a Recall-Controlled Probe Cascade
Hidden-state probes can flag doomed LLM-agent episodes from the first round, and a recall-calibrated cascade of abort gates cuts generated tokens by up to 60% while preserving a chosen success-recall target.
Reference graph
Works this paper leans on
-
[1]
Thus, � β��� �1:T−1 ������ �� ⊥ � � β��� �1:T−1 ���
If � β��� �1:T−1 ���� � ⊥: The policy abstains ( ��������� �1:T−1 � � � ). Thus, � β��� �1:T−1 ������ �� ⊥ � � β��� �1:T−1 ���
-
[2]
If� β��� �1:T−1 ����� ⊥: The policy does not abstain (��������� �1:T−1 � � �). Consequently, ����������1:T−1 �������� �������� 1:T−1 �������� ����� 1:T−1 ��������� The value becomes � β��� �1:T−1 ������ �������1:T−1 ����������� ����1:T−1 �������� �ref���1:T−1 �������� �� β��� �1:T−1 ����� ⊥� Combining these,� β��� �1:T−1 ������ � ����� ⊥� �β��� �1:T−1 ���...
-
[3]
Thus, � β��� �1:T−2 ������ �� ⊥ � � β��� �1:T−2 ���
If � β��� �1:T−2 ���� � ⊥: The policy abstains ( ��������� �1:T−2 � � � ). Thus, � β��� �1:T−2 ������ �� ⊥ � � β��� �1:T−2 ���
-
[4]
Again, ����������1:T−2 �������� � �������1:T−2 �������� �����1:T−2 ��������
If � β��� �1:T−2 ����� ⊥: The policy does not abstain (��������� �1:T−2 � � � ). Again, ����������1:T−2 �������� � �������1:T−2 �������� �����1:T−2 ��������. The value becomes � β��� �1:T−2 ������ ��������� � 1:T−2 � � ������1:T−2 ����������� ����1:T−2 �������� �ref���1:T−2 �������� � � � yT−� ∈V ���T−1 ��� �1:T−2 ��β�����1:T−2 � �T−1 ������� ��������� � ...
-
[5]
For all� ∗ 0 ������� π �0���, we have� 0��� �1:t��∗ 0� � ��� y′∈V T :y′ ��t=y��t ���� �′�
-
[6]
For all� ∗ 0 ������� π �0���, we have� 0��� �1:t����∗ 0�� � ����� ⊥� �0��� �1:t��∗ 0��. Combining these sub-claims, for any�in the support of�: �0��� �1:0����∗ 0�� � ��� �� ⊥� �0��� �1:0��∗ 0��(20) � ��� � �⊥���� y∈V T ���� �� � (21) � ��� y∈V † T ���� ���(22) where the last equality follows from the fact that any trajectory in � †T either terminates in �...
-
[7]
Proof of Sub-claim 2.We proceed by backward induction on�
Therefore� 0��� �1:t��∗ 0� �� ∗ max. Proof of Sub-claim 2.We proceed by backward induction on�. Base case (����� ):At the final non-terminal position, the only available action in � is ��� , so �0��� �1:T−1 ��∗ 0� � ���� �1:T−1 �����. If� 0��� �1:T−1 ��∗ 0�� � ⊥, then��� ∗ 0�abstains, yielding: �0��� �1:T−1 ����∗ 0�� �� ⊥ � ����� ⊥� �0��� �1:T−1 ��∗ 0���(...
-
[8]
This ensures that ���α� correctly estimates the true probability of correctness at the point where abstention is triggered
Calibration: For any probability �, among samples with ������� , the empirical frequency of correctness should be approximately �. This ensures that ���α� correctly estimates the true probability of correctness at the point where abstention is triggered
-
[9]
This ensures coherence: higher estimated values correspond to higher true probabilities
Monotonicity: � should be non-decreasing. This ensures coherence: higher estimated values correspond to higher true probabilities. Isotonic regression provides a transformation satisfying both properties. For baseline methods that make decisions at �� � , we fit isotonic regression on ���0�correctness�pairs across all samples. For dynamic abstention, we f...
-
[10]
Each abstention rate determines a threshold.For each � , we find the threshold � α such that exactly fraction � of samples abstain
-
[11]
This means different thresholds yield different calibration functions �M,α
For each threshold, we fit isotonic regression separately.Per the methodology above, calibration is performed independently for each threshold on samples that abstain at that threshold. This means different thresholds yield different calibration functions �M,α. Since each calibration is fit independently, there is no monotonicity guarantee across threshol...
-
[12]
��������� ����� ���������� �� ���� �������� ������ ������ �������
The range of ��⊥ is determined by empirical accuracies at abstention boundaries.For each threshold � α, the calibrated value ��⊥ �� M,α��α� estimates the true probability of correctness for samples near the abstention boundary. This is fundamentally bounded by the empirical accuracy of these samples: • Lower bound:At low abstention rates (e.g., �� ���� ),...
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.