Simulation-based multi-criteria comparison of mono-articular and bi-articular exoskeletons during walking with and without load
Pith reviewed 2026-05-24 13:11 UTC · model grok-4.3
The pith
Simulations show mono-articular exoskeletons reduce peak joint reaction forces better than bi-articular designs during loaded walking, while bi-articular power use is less sensitive to load and inertia.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
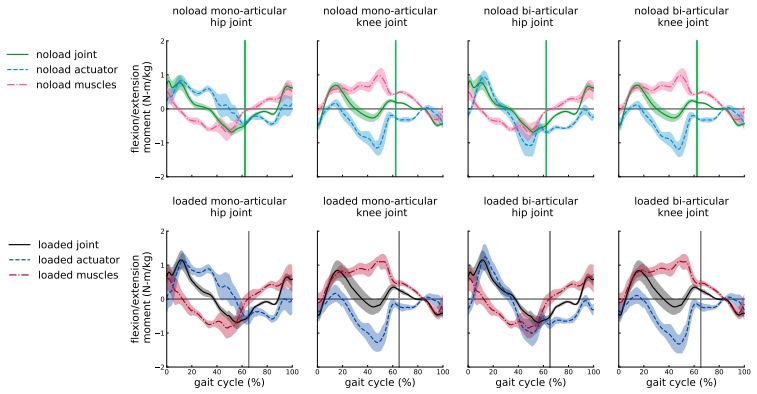
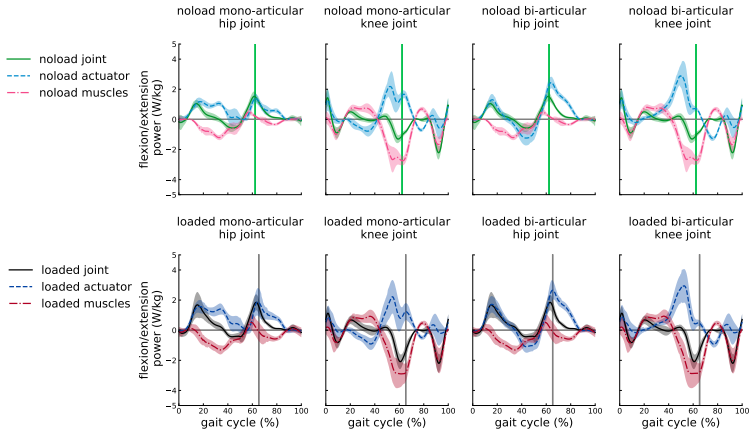
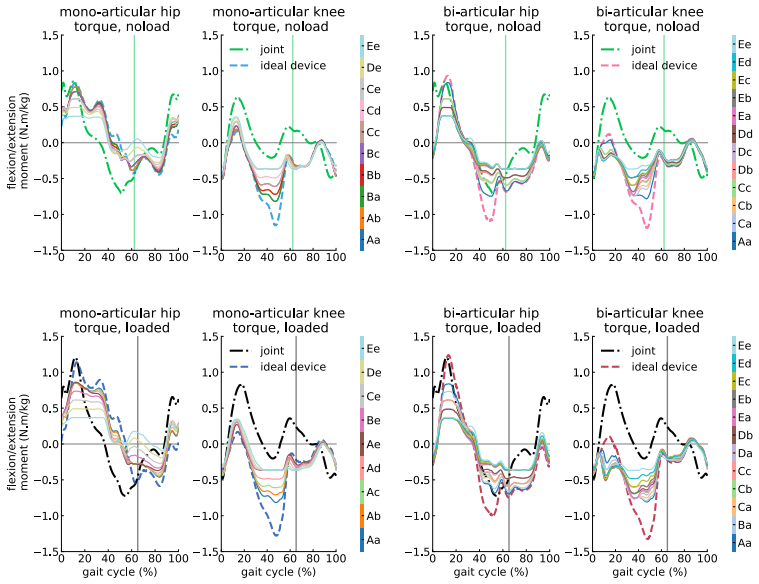
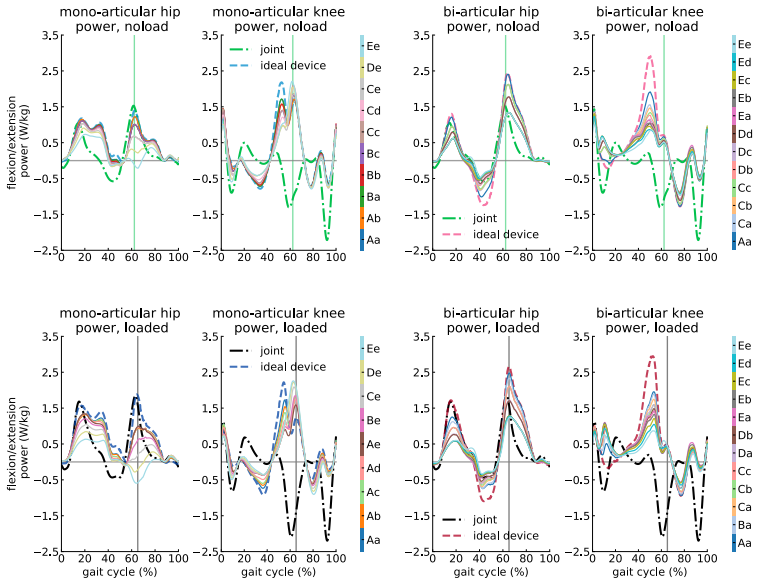
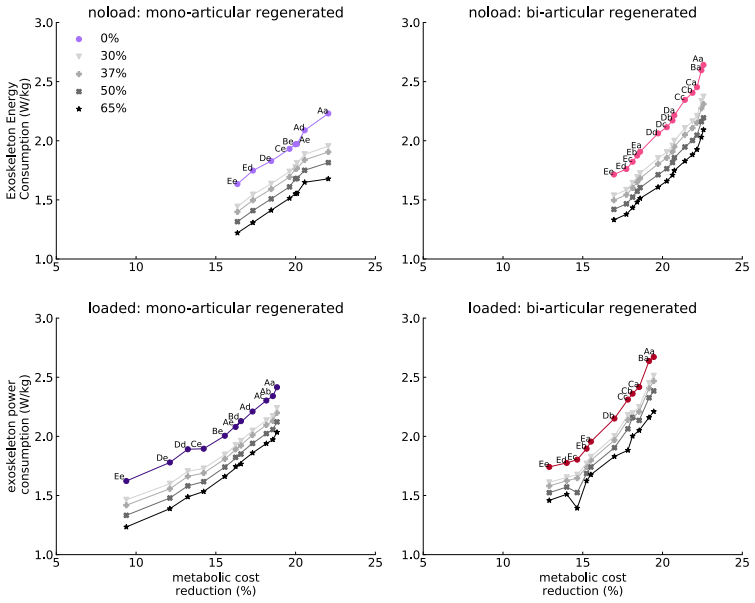
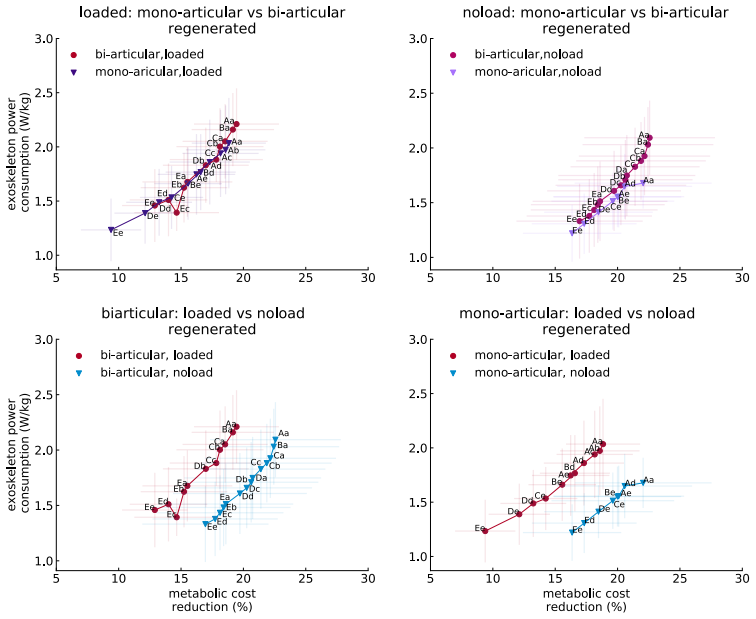
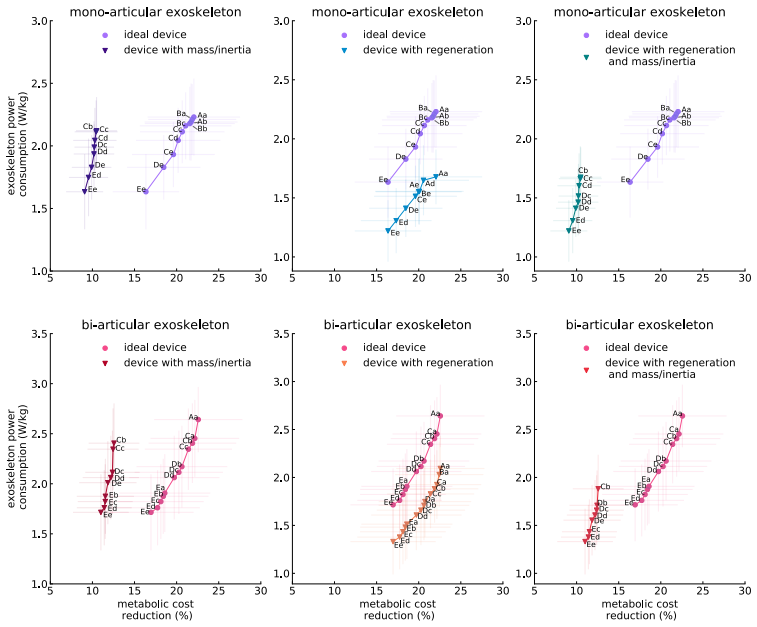
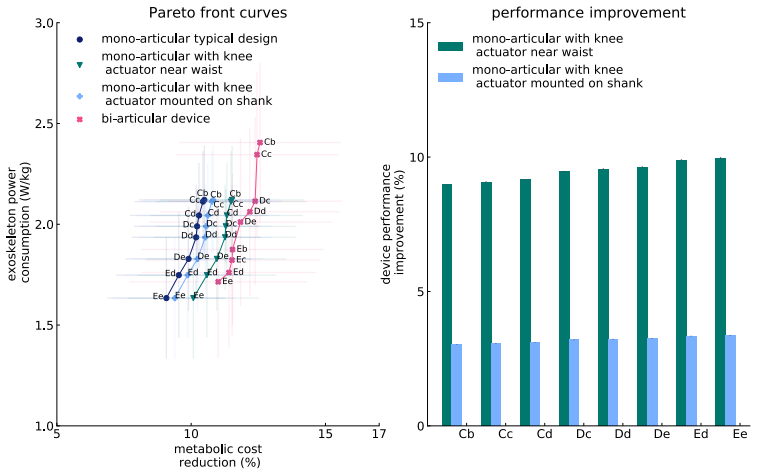
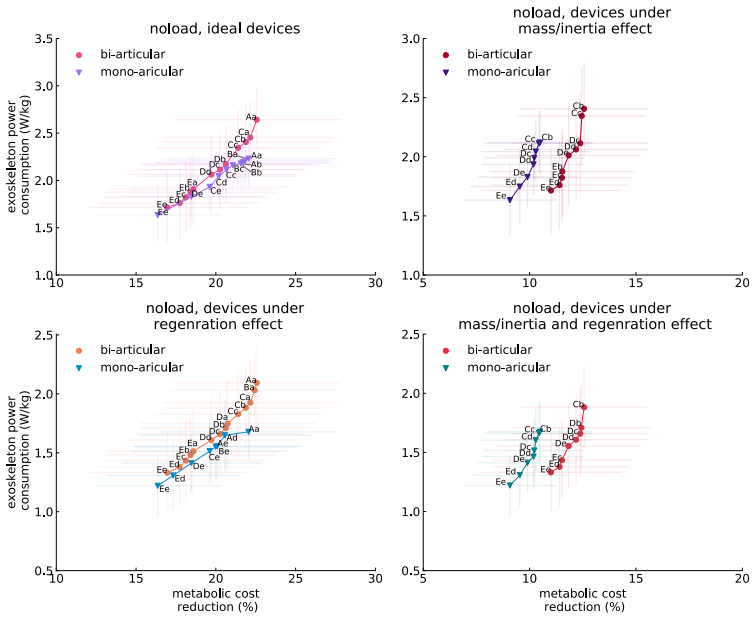
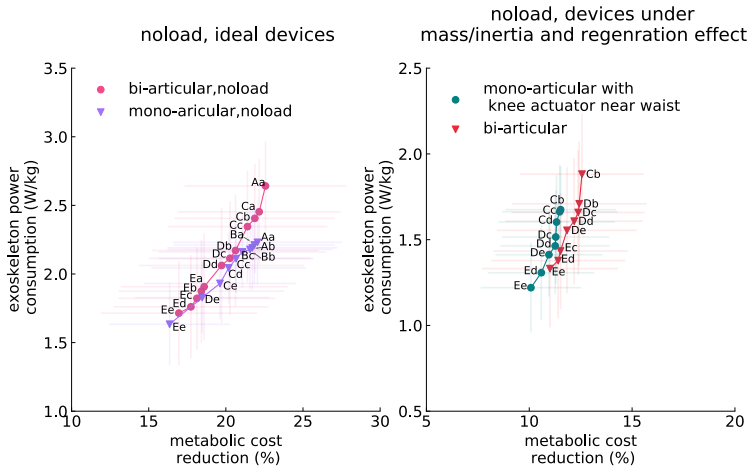
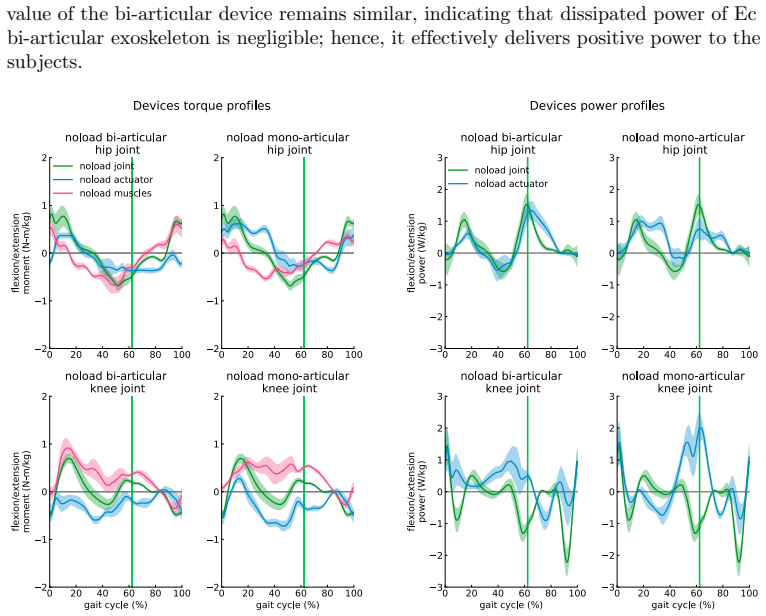
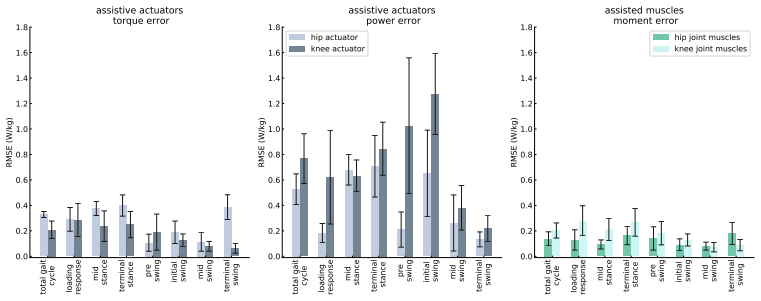
A simulation-based multi-criteria comparison under actuator saturation finds that mono-articular and bi-articular exoskeletons deliver comparable metabolic assistance during walking with and without loads, yet mono-articular devices reduce peak reaction forces more, bi-articular power consumption is less sensitive to loading, and bi-articular device inertia produces smaller increases in metabolic cost while leaving Pareto-optimal solutions unchanged. The study derives optimal assistance torque profiles for each kinematics type, superposes inertia and regeneration effects, and explains how heavy loads alter the preferred torque shapes.
What carries the argument
Pareto optimization of exoskeleton power consumption versus human metabolic rate reduction, applied to musculoskeletal model simulations of mono- versus bi-articular kinematics under actuator saturation, inertia, and regeneration.
If this is right
- Heavy loads shift the optimal assistance torque profiles for both device types.
- Design guidelines emerge for choosing mono- or bi-articular kinematics under torque limits, inertia, and regeneration.
- Mono-articular devices outperform on peak reaction force reduction despite similar metabolic assistance.
- Bi-articular power consumption varies less with changes in load.
- Bi-articular inertia affects metabolic cost less severely and preserves Pareto optimality of solutions.
Where Pith is reading between the lines
- Bi-articular designs may suit applications where device mass or load varies frequently.
- The simulation framework could be extended to test hybrid kinematics that combine mono- and bi-articular elements.
- These load-dependent guidelines could be checked against other locomotion tasks such as stair ascent.
- Real hardware prototypes built from the optimized profiles would allow direct comparison of measured versus simulated metabolic savings.
Load-bearing premise
The musculoskeletal model correctly predicts real human metabolic cost, muscle activation, and joint reaction forces when exoskeleton dynamics and torque profiles are added.
What would settle it
Direct measurements of metabolic cost, muscle activity, and joint forces on human subjects wearing the simulated mono-articular and bi-articular exoskeletons while walking with loads, compared against the model's predicted advantages.
Figures


read the original abstract
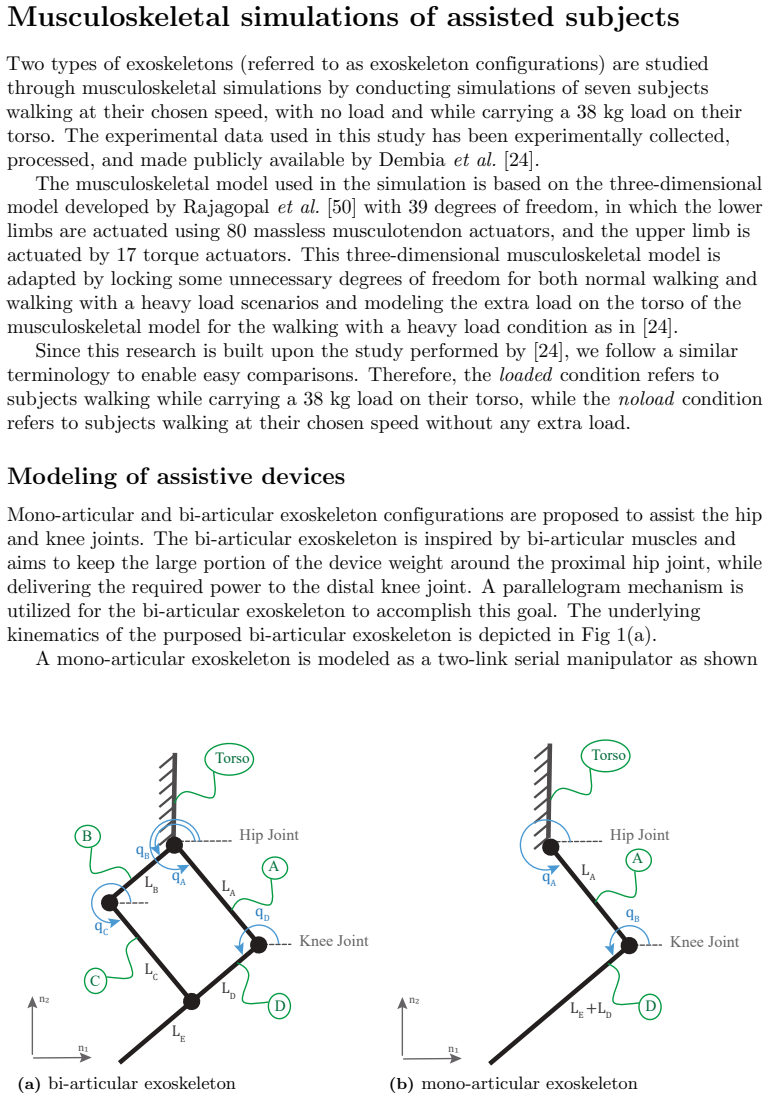
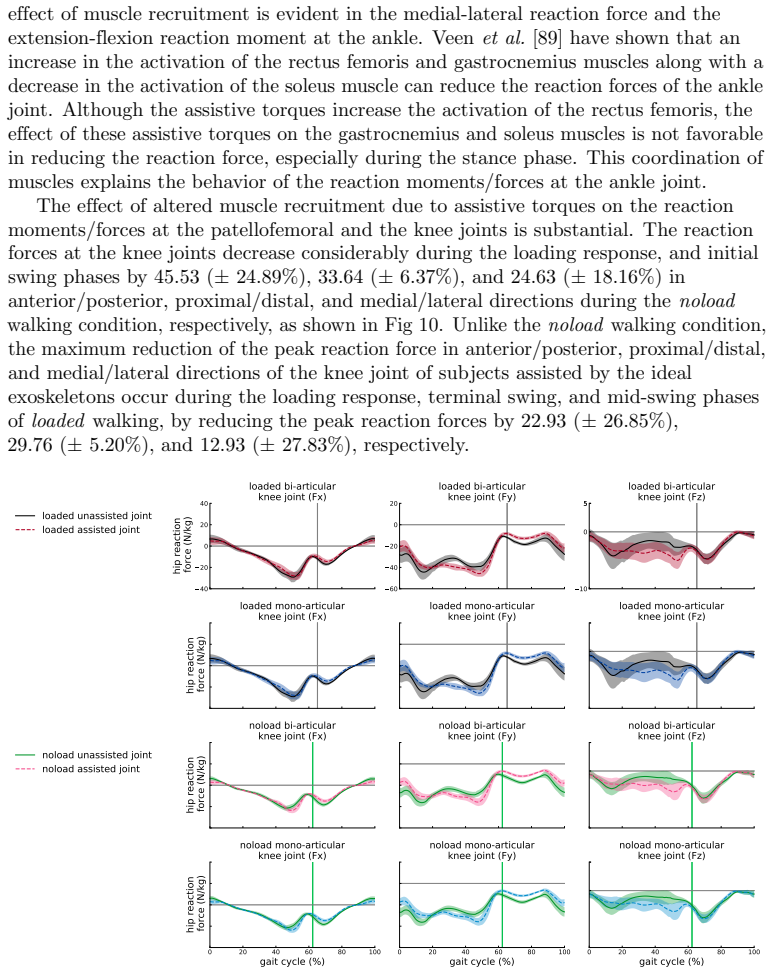
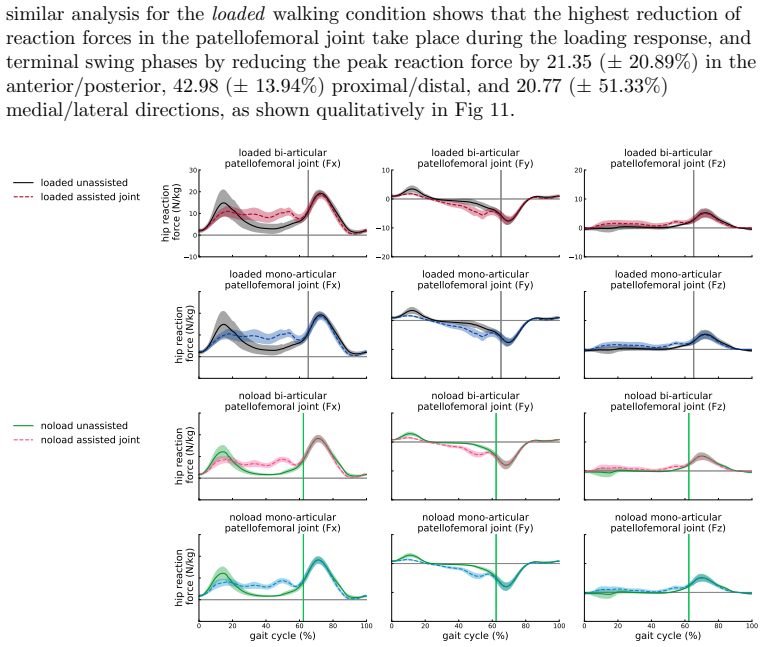
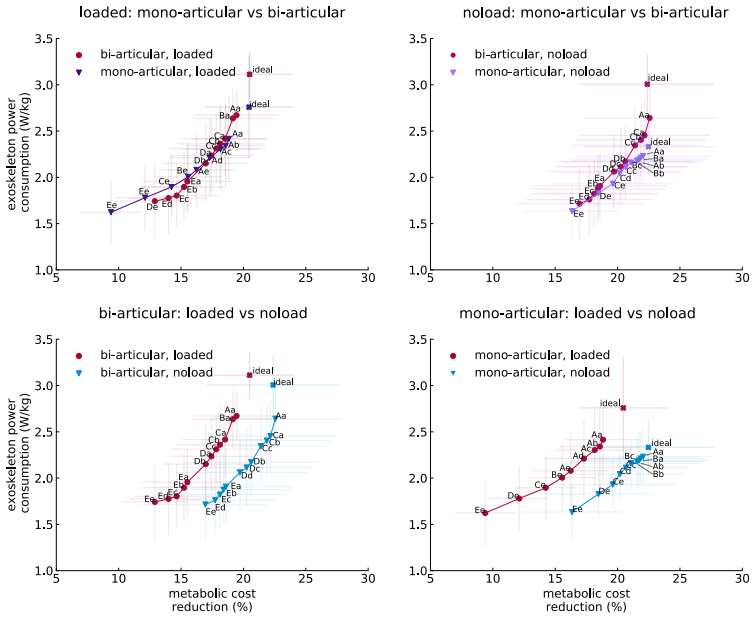
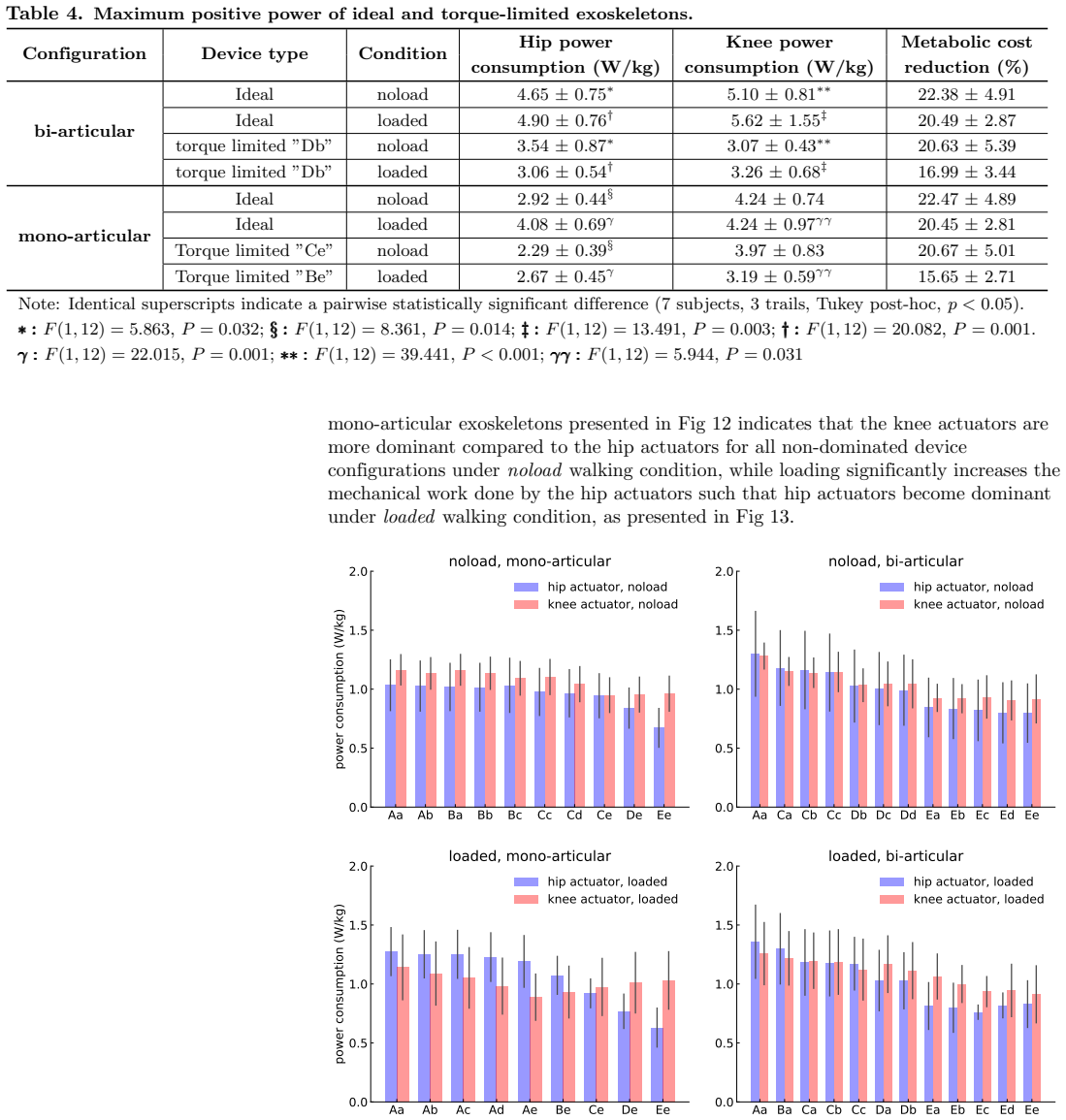
Developing exoskeletons that can reduce the metabolic cost of assisted subjects is challenging since a systematic design approach is required to capture the effects of device dynamics and the assistance torques on human performance. Design studies that rely on musculoskeletal models hold high promise in providing effective design guidelines, as the effect of various devices and different assistance torque profiles on metabolic cost can be studied systematically. In this paper, we present a simulation-based multi-criteria design approach to systematically study the effect of different device kinematics and corresponding optimal assistive torque profiles under actuator saturation on the metabolic cost, muscle activation, and joint reaction forces of subjects walking under different loading conditions. For the multi-criteria comparison of exoskeletons, we introduce a Pareto optimization approach to simultaneously optimize the exoskeleton power consumption and the human metabolic rate reduction during walking, under different loading conditions. We further superpose the effects of device inertia and electrical regeneration on the metabolic rate and power consumption, respectively. Our results explain the effects of heavy loads on the optimal assistance profiles of the exoskeletons and provide guidelines on choosing optimal device configurations under actuator torque limitations, device inertia, and regeneration effects. The multi-criteria comparison of devices indicates that despite the similar assistance levels of both devices, mono-articular exoskeletons show better performance on reducing the peak reaction forces, while the power consumption of bi-articular devices is less sensitive to the loading. Furthermore, for the bi-articular exoskeletons, the device inertia has lower detrimental effects on the metabolic cost of subjects and does not affect the Pareto-optimality of solutions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a simulation-based multi-criteria design approach using musculoskeletal models to compare mono-articular and bi-articular exoskeletons during walking with and without load. It employs Pareto optimization to simultaneously minimize exoskeleton power consumption and human metabolic rate reduction under actuator saturation, while superposing effects of device inertia and electrical regeneration. Results indicate that mono-articular devices better reduce peak reaction forces despite similar assistance levels, bi-articular device power consumption is less sensitive to loading, and bi-articular inertia has lower detrimental effects on metabolic cost without affecting Pareto-optimality.
Significance. If the underlying musculoskeletal model predictions hold, the work offers systematic design guidelines for exoskeleton kinematics and torque profiles across loading conditions, with the Pareto-front approach providing a clear multi-objective framework that accounts for actuator limits, inertia, and regeneration. The simulation methodology enables exploration of parameter spaces not easily accessible experimentally.
major comments (2)
- [Abstract] Abstract and results sections: All comparative claims (mono- vs. bi-articular performance on peak reaction forces, loading sensitivity of power consumption, and inertia effects on metabolic cost) rest on forward simulation outputs from a single musculoskeletal model taken as ground truth for metabolic rate, muscle activation, and joint forces. No cross-validation against human subject data under the same torque profiles, actuator saturation, or added inertia is referenced, making the reported differences sensitive to any systematic model bias in device-human interaction.
- [Methods] Methods (model description): The central assumption that the model accurately predicts metabolic cost and reaction forces under exoskeleton assistance and varying loads is load-bearing for the multi-criteria comparison and design guidelines, yet the manuscript provides no experimental validation or sensitivity analysis to alternative model parameters for these assisted conditions.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback on our simulation-based study. We address the major comments below regarding the reliance on the musculoskeletal model.
read point-by-point responses
-
Referee: [Abstract] Abstract and results sections: All comparative claims (mono- vs. bi-articular performance on peak reaction forces, loading sensitivity of power consumption, and inertia effects on metabolic cost) rest on forward simulation outputs from a single musculoskeletal model taken as ground truth for metabolic rate, muscle activation, and joint forces. No cross-validation against human subject data under the same torque profiles, actuator saturation, or added inertia is referenced, making the reported differences sensitive to any systematic model bias in device-human interaction.
Authors: The study is designed as a simulation investigation to systematically explore exoskeleton designs using established musculoskeletal modeling techniques. While we acknowledge that the results depend on the model's accuracy and that direct experimental validation under assisted conditions is not included, the comparative claims are made relative to the same model for both device types, allowing for consistent comparison. We will revise the abstract, results, and discussion sections to explicitly note the simulation nature of the work and the potential for model bias, and to suggest future experimental studies for validation. This will ensure the claims are appropriately qualified. revision: yes
-
Referee: [Methods] Methods (model description): The central assumption that the model accurately predicts metabolic cost and reaction forces under exoskeleton assistance and varying loads is load-bearing for the multi-criteria comparison and design guidelines, yet the manuscript provides no experimental validation or sensitivity analysis to alternative model parameters for these assisted conditions.
Authors: We agree that experimental validation for assisted conditions would be ideal. The model is based on standard OpenSim implementations with metabolic cost models validated in literature for unassisted walking. To strengthen the manuscript, we will add a dedicated subsection in the discussion on model assumptions, limitations, and the need for sensitivity analyses. We will also perform and include a basic sensitivity analysis on key parameters affecting metabolic cost and joint forces if feasible within the revision timeline. revision: partial
Circularity Check
No circularity: results derive from forward simulation on standard musculoskeletal models
full rationale
The paper performs Pareto optimization of exoskeleton power consumption versus metabolic rate reduction by running forward dynamics simulations on established musculoskeletal models under varying loads and actuator constraints. All reported comparisons (mono- vs. bi-articular performance on peak forces, inertia sensitivity, Pareto fronts) are direct outputs of these simulations rather than quantities fitted to data within the paper and then re-labeled as predictions. No self-citation chains, uniqueness theorems, or ansatzes imported from prior author work are used to justify the central claims; the model itself is treated as an external, independently developed benchmark. This is the normal case of a self-contained simulation study.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We introduce a Pareto optimization approach to simultaneously optimize the exoskeleton power consumption and the human metabolic rate reduction during walking, under different loading conditions.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The multi-criteria comparison of devices indicates that despite the similar assistance levels of both devices, mono-articular exoskeletons show better performance on reducing the peak reaction forces...
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Bioenergetics and the origin of hominid bipedalism
Rodman PS, McHenry HM. Bioenergetics and the origin of hominid bipedalism. American Journal of Physical Anthropology. 1980;52(1):103–106
work page 1980
-
[2]
Simulating ideal assistive devices to reduce the metabolic cost of running
Uchida TK, Seth A, Pouya S, Dembia CL, Hicks JL, Delp SL. Simulating ideal assistive devices to reduce the metabolic cost of running. PloS one. 2016;11(9):e0163417
work page 2016
-
[3]
The concept of quality of life: what we know and do not know
Schalock RL. The concept of quality of life: what we know and do not know. Journal of intellectual disability research. 2004;48(3):203–216
work page 2004
-
[4]
Kubo K, Kanehisa H, Fukunaga T. Effects of resistance and stretching training programmes on the viscoelastic properties of human tendon structures in vivo. The journal of physiology. 2002;538(1):219–226
work page 2002
-
[5]
Body-weight–supported treadmill rehabilitation after stroke
Duncan PW, Sullivan KJ, Behrman AL, Azen SP, Wu SS, Nadeau SE, et al. Body-weight–supported treadmill rehabilitation after stroke. New England Journal of Medicine. 2011;364(21):2026–2036
work page 2011
-
[6]
Ruby B, Leadbetter III G, Armstrong D, Gaskill S. Wildland firefighter load carriage: effects on transit time and physiological responses during simulated escape to safety zone. International Journal of Wildland Fire. 2003;12(1):111–116
work page 2003
-
[7]
Soldier load carriage: historical, physiological, biomechanical, and medical aspects
Knapik JJ, Reynolds KL, Harman E. Soldier load carriage: historical, physiological, biomechanical, and medical aspects. Military medicine. 2004;169(1):45–56
work page 2004
-
[8]
A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of human walking
Malcolm P, Derave W, Galle S, De Clercq D. A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of human walking. PloS one. 2013;8(2):e56137
work page 2013
-
[9]
Autonomous exoskeleton reduces metabolic cost of human walking during load carriage
Mooney LM, Rouse EJ, Herr HM. Autonomous exoskeleton reduces metabolic cost of human walking during load carriage. Journal of neuroengineering and rehabilitation. 2014;11(1):1–11
work page 2014
-
[10]
Reducing the energy cost of human walking using an unpowered exoskeleton
Collins SH, Wiggin MB, Sawicki GS. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature. 2015;522(7555):212–215
work page 2015
-
[11]
Reducing the metabolic cost of running with a tethered soft exosuit
Lee G, Kim J, Panizzolo F, Zhou Y, Baker L, Galiana I, et al. Reducing the metabolic cost of running with a tethered soft exosuit. Sci Robot. 2017;2(6):6708–31
work page 2017
-
[12]
The exoskeleton expansion: improving walking and running economy
Sawicki GS, Beck ON, Kang I, Young AJ. The exoskeleton expansion: improving walking and running economy. Journal of NeuroEngineering and Rehabilitation. 2020;17(1):1–9
work page 2020
-
[13]
Energetics of walking with a robotic knee exoskeleton
MacLean MK, Ferris DP. Energetics of walking with a robotic knee exoskeleton. Journal of applied biomechanics. 2019;35(5):320–326
work page 2019
-
[14]
Kim DS, Lee HJ, Lee SH, Chang WH, Jang J, Choi BO, et al. A wearable hip-assist robot reduces the cardiopulmonary metabolic energy expenditure during stair ascent in elderly adults: a pilot cross-sectional study. BMC geriatrics. 2018;18(1):1–8. October 4, 2021 66/72
work page 2018
-
[15]
Lee HJ, Lee S, Chang WH, Seo K, Shim Y, Choi BO, et al. A wearable hip assist robot can improve gait function and cardiopulmonary metabolic efficiency in elderly adults. IEEE transactions on neural systems and rehabilitation engineering. 2017;25(9):1549–1557
work page 2017
-
[16]
A soft robotic exosuit improves walking in patients after stroke
Awad LN, Bae J, O’donnell K, De Rossi SM, Hendron K, Sloot LH, et al. A soft robotic exosuit improves walking in patients after stroke. Science translational medicine. 2017;9(400)
work page 2017
-
[17]
Lower extremity exoskeletons and active orthoses: challenges and state-of-the-art
Dollar AM, Herr H. Lower extremity exoskeletons and active orthoses: challenges and state-of-the-art. IEEE Transactions on robotics. 2008;24(1):144–158
work page 2008
-
[18]
State of the art and future directions for lower limb robotic exoskeletons
Young AJ, Ferris DP. State of the art and future directions for lower limb robotic exoskeletons. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2016;25(2):171–182
work page 2016
-
[19]
Seth A, Hicks JL, Uchida TK, Habib A, Dembia CL, Dunne JJ, et al. OpenSim: Simulating musculoskeletal dynamics and neuromuscular control to study human and animal movement. PLoS computational biology. 2018;14(7):e1006223
work page 2018
-
[20]
Humans can continuously optimize energetic cost during walking
Selinger JC, O’Connor SM, Wong JD, Donelan JM. Humans can continuously optimize energetic cost during walking. Current Biology. 2015;25(18):2452–2456
work page 2015
-
[21]
Learning to walk with a robotic ankle exoskeleton
Gordon KE, Ferris DP. Learning to walk with a robotic ankle exoskeleton. Journal of biomechanics. 2007;40(12):2636–2644
work page 2007
-
[22]
Lower limb assistive device design optimization using musculoskeletal modeling: a review
Grabke EP, Masani K, Andrysek J. Lower limb assistive device design optimization using musculoskeletal modeling: a review. Journal of Medical Devices. 2019;13(4)
work page 2019
-
[23]
Smith SH, Coppack RJ, van den Bogert AJ, Bennett AN, Bull AM. Review of musculoskeletal modelling in a clinical setting: Current use in rehabilitation design, surgical decision making and healthcare interventions. Clinical Biomechanics. 2021; p. 105292
work page 2021
-
[24]
Simulating ideal assistive devices to reduce the metabolic cost of walking with heavy loads
Dembia CL, Silder A, Uchida TK, Hicks JL, Delp SL. Simulating ideal assistive devices to reduce the metabolic cost of walking with heavy loads. PloS one. 2017;12(7):e0180320
work page 2017
-
[25]
Jackson RW, Dembia CL, Delp SL, Collins SH. Muscle–tendon mechanics explain unexpected effects of exoskeleton assistance on metabolic rate during walking. Journal of Experimental Biology. 2017;220(11):2082–2095
work page 2017
-
[26]
Farris DJ, Hicks JL, Delp SL, Sawicki GS. Musculoskeletal modelling deconstructs the paradoxical effects of elastic ankle exoskeletons on plantar-flexor mechanics and energetics during hopping. Journal of Experimental Biology. 2014;217(22):4018–4028
work page 2014
-
[27]
Sawicki GS, Khan NS. A simple model to estimate plantarflexor muscle–tendon mechanics and energetics during walking with elastic ankle exoskeletons. IEEE Transactions on Biomedical Engineering. 2015;63(5):914–923
work page 2015
-
[28]
Simulating gait assistance of a hip exoskeleton: Feasibility studies for ankle muscle weaknesses
Lim B, Hyung S, Kim K, Lee J, Jang J, Shim Y. Simulating gait assistance of a hip exoskeleton: Feasibility studies for ankle muscle weaknesses. In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE; 2016. p. 5664–5669. October 4, 2021 67/72
work page 2016
-
[29]
Simulating gait assistance of a hip exoskeleton: Case studies for ankle pathologies
Lim B, Hyoung S, Lee J, Seo K, Jang J, Shim Y. Simulating gait assistance of a hip exoskeleton: Case studies for ankle pathologies. In: 2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE; 2017. p. 1022–1027
work page 2017
-
[30]
OpenSim: open-source software to create and analyze dynamic simulations of movement
Delp SL, Anderson FC, Arnold AS, Loan P, Habib A, John CT, et al. OpenSim: open-source software to create and analyze dynamic simulations of movement. IEEE transactions on biomedical engineering. 2007;54(11):1940–1950
work page 2007
-
[31]
Hicks JL, Uchida TK, Seth A, Rajagopal A, Delp SL. Is my model good enough? Best practices for verification and validation of musculoskeletal models and simulations of movement. Journal of biomechanical engineering. 2015;137(2)
work page 2015
-
[32]
Gordon DF, Henderson G, Vijayakumar S. Effectively quantifying the performance of lower-limb exoskeletons over a range of walking conditions. Frontiers in Robotics and AI. 2018;5:61
work page 2018
-
[33]
Ong CF, Hicks JL, Delp SL. Simulation-based design for wearable robotic systems: an optimization framework for enhancing a standing long jump. IEEE Transactions on Biomedical Engineering. 2015;63(5):894–903
work page 2015
-
[34]
Simulation-based biomechanical assessment of unpowered exoskeletons for running
Aftabi H, Nasiri R, Ahmadabadi MN. Simulation-based biomechanical assessment of unpowered exoskeletons for running. Scientific Reports. 2021;11(1):1–12
work page 2021
-
[35]
Bianco NA, Franks PW, Hicks JL, Delp SL. Coupled exoskeleton assistance simplifies control and maintains metabolic benefits: a simulation study. bioRxiv. 2021
work page 2021
-
[36]
Opensim moco: musculoskeletal optimal control
Dembia CL, Bianco NA, Falisse A, Hicks JL, Delp SL. Opensim moco: musculoskeletal optimal control. PLOS Computational Biology. 2020;16(12):e1008493
work page 2020
-
[37]
Scone: Open source software for predictive simulation of biological motion
Geijtenbeek T. Scone: Open source software for predictive simulation of biological motion. Journal of Open Source Software. 2019;4(38):1421
work page 2019
-
[38]
Predictive simulation of human walking augmented by a powered ankle exoskeleton
Nguyen VQ, Umberger BR, Sup FC. Predictive simulation of human walking augmented by a powered ankle exoskeleton. In: 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR). IEEE; 2019. p. 53–58
work page 2019
-
[39]
Simulation of a powered ankle prosthesis with dynamic joint alignment
LaPr` e AK, Umberger BR, Sup F. Simulation of a powered ankle prosthesis with dynamic joint alignment. In: 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE; 2014. p. 1618–1621
work page 2014
-
[40]
Design of variable-damping control for prosthetic knee based on a simulated biped
Zhao J, Berns K, de Souza Baptista R, B´ o APL. Design of variable-damping control for prosthetic knee based on a simulated biped. In: 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR). IEEE; 2013. p. 1–6
work page 2013
-
[41]
Handford ML, Srinivasan M. Robotic lower limb prosthesis design through simultaneous computer optimizations of human and prosthesis costs. Scientific reports. 2016;6(1):1–7
work page 2016
-
[42]
Sreenivasa M, Millard M, Felis M, Mombaur K, Wolf SI. Optimal control based stiffness identification of an ankle-foot orthosis using a predictive walking model. Frontiers in computational neuroscience. 2017;11:23. October 4, 2021 68/72
work page 2017
-
[43]
Fey NP, Klute GK, Neptune RR. Optimization of prosthetic foot stiffness to reduce metabolic cost and intact knee loading during below-knee amputee walking: a theoretical study. Journal of biomechanical engineering. 2012;134(11)
work page 2012
-
[44]
Junius K, Moltedo M, Cherelle P, Rodriguez-Guerrero C, Vanderborght B, Lefeber D. Biarticular elements as a contributor to energy efficiency: biomechanical review and application in bio-inspired robotics. Bioinspiration & biomimetics. 2017;12(6):061001
work page 2017
-
[45]
Schenau GJVI. From rotation to translation: Constraints on multi-joint movements and the unique action of bi-articular muscles. Human Movement Science. 1989;8(4):301–337
work page 1989
-
[46]
Jacobs R, Bobbert MF, van Ingen Schenau GJ. Mechanical output from individual muscles during explosive leg extensions: the role of biarticular muscles. Journal of biomechanics. 1996;29(4):513–523
work page 1996
-
[47]
Prilutsky BI, Petrova LN, Raitsin LM. Comparison of mechanical energy expenditure of joint moments and muscle forces during human locomotion. Journal of biomechanics. 1996;29(4):405–415
work page 1996
-
[48]
Wells R. Mechanical energy costs of human movement: an approach to evaluating the transfer possibilities of two-joint muscles. Journal of biomechanics. 1988;21(11):955–964
work page 1988
-
[49]
The effects of adding mass to the legs on the energetics and biomechanics of walking
Browning RC, Modica JR, Kram R, Goswami A. The effects of adding mass to the legs on the energetics and biomechanics of walking. Medicine & Science in Sports & Exercise. 2007;39(3):515–525
work page 2007
-
[50]
Full-body musculoskeletal model for muscle-driven simulation of human gait
Rajagopal A, Dembia CL, DeMers MS, Delp DD, Hicks JL, Delp SL. Full-body musculoskeletal model for muscle-driven simulation of human gait. IEEE transactions on biomedical engineering. 2016;63(10):2068–2079
work page 2016
-
[51]
Generating dynamic simulations of movement using computed muscle control
Thelen DG, Anderson FC, Delp SL. Generating dynamic simulations of movement using computed muscle control. Journal of biomechanics. 2003;36(3):321–328
work page 2003
-
[52]
A model of human muscle energy expenditure
Umberger BR, Gerritsen KG, Martin PE. A model of human muscle energy expenditure. Computer methods in biomechanics and biomedical engineering. 2003;6(2):99–111
work page 2003
-
[53]
Stretching your energetic budget: how tendon compliance affects the metabolic cost of running
Uchida TK, Hicks JL, Dembia CL, Delp SL. Stretching your energetic budget: how tendon compliance affects the metabolic cost of running. PloS one. 2016;11(3):e0150378
work page 2016
-
[54]
Compressive tibiofemoral force during crouch gait
Steele KM, DeMers MS, Schwartz MH, Delp SL. Compressive tibiofemoral force during crouch gait. Gait & posture. 2012;35(4):556–560
work page 2012
-
[55]
Principles of optimal design: modeling and computation
Papalambros PY, Wilde DJ. Principles of optimal design: modeling and computation. Cambridge university press; 2000
work page 2000
-
[56]
The weighted sum method for multi-objective optimization: new insights
Marler RT, Arora JS. The weighted sum method for multi-objective optimization: new insights. Structural and multidisciplinary optimization. 2010;41(6):853–862
work page 2010
-
[57]
A multi-criteria design optimization framework for haptic interfaces
Unal R, Kiziltas G, Patoglu V. A multi-criteria design optimization framework for haptic interfaces. In: 2008 Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems. IEEE; 2008. p. 231–238. October 4, 2021 69/72
work page 2008
-
[58]
Multi-criteria design optimization of parallel robots
Unal R, Kiziltas G, Patoglu V. Multi-criteria design optimization of parallel robots. In: 2008 IEEE Conference on Robotics, Automation and Mechatronics. IEEE; 2008. p. 112–118
work page 2008
-
[59]
Co-design strategies for optimal variable stiffness actuation
Kamadan A, Kiziltas G, Patoglu V. Co-design strategies for optimal variable stiffness actuation. IEEE/ASME Transactions on Mechatronics. 2017;22(6):2768–2779
work page 2017
-
[60]
Aydin Y, Tokatli O, Patoglu V, Basdogan C. A Computational Multicriteria Optimization Approach to Controller Design for Physical Human-Robot Interaction. IEEE Transactions on Robotics. 2020;36(6):1791–1804
work page 2020
-
[61]
Merlet J. Parallel Robots. vol. 128. Springer Science & Business Media; 2006
work page 2006
-
[62]
Tosun FE, Patoglu V. Necessary and Sufficient Conditions for the Passivity of Impedance Rendering With Velocity-Sourced Series Elastic Actuation. IEEE Transactions on Robotics. 2020;36(3):757–772
work page 2020
-
[63]
Stable physical human-robot interaction using fractional order admittance control
Aydin Y, Tokatli O, Patoglu V, Basdogan C. Stable physical human-robot interaction using fractional order admittance control. IEEE transactions on haptics. 2018;11(3):464–475
work page 2018
-
[64]
Online Generation of Velocity Fields for Passive Contour Following
Erdogan A, Patoglu V. Online Generation of Velocity Fields for Passive Contour Following. In: IEEE World Haptics Conference; 2011. p. 245–250
work page 2011
-
[65]
Stability of haptic systems with fractional order controllers
Tokatli O, Patoglu V. Stability of haptic systems with fractional order controllers. In: International Conference on Intelligent Robots and Systems (IROS). IEEE; 2015. p. 1172–1177
work page 2015
-
[66]
Passivity of series damped elastic actuation under velocity-sourced impedance control
Mengilli U, Orhan ZO, Caliskan U, Patoglu V. Passivity of series damped elastic actuation under velocity-sourced impedance control. In: IEEE World Haptics Conference (WHC); 2021. p. 379–384
work page 2021
-
[67]
Two-Port Analysis of Stability and Transparency in Series Damped Elastic Actuation
Mengilli U, Caliskan U, Orhan ZO, Patoglu V. Two-Port Analysis of Stability and Transparency in Series Damped Elastic Actuation. CoRR. 2020
work page 2020
-
[68]
A Self-Adjusting Knee Exoskeleton for Robot-Assisted Treatment of Knee Injuries
Ergin MA, Patoglu V. A Self-Adjusting Knee Exoskeleton for Robot-Assisted Treatment of Knee Injuries. In: IEEE/RSJ International Conference on Intelligent Robots and Systems; 2011. p. 4917–4922
work page 2011
-
[69]
AssistOn-SE: A Self-Aligning Shoulder-Elbow Exoskeleton
Ergin MA, Patoglu V. AssistOn-SE: A Self-Aligning Shoulder-Elbow Exoskeleton. In: IEEE International Conference on Robotics and Automation
-
[70]
Kinematics and Design of AssistOn-SE: A Self-Adjusting Shoulder-Elbow Exoskeleton
Yalcin M, Patoglu V. Kinematics and Design of AssistOn-SE: A Self-Adjusting Shoulder-Elbow Exoskeleton. In: IEEE International Conference on Biomedical Robotics and Biomechatronics; 2012. p. 1579–1585
work page 2012
-
[71]
AssistOn-Knee: A Self-Aligning Knee Exoskeleton
Celebi B, Yalcin M, Patoglu V. AssistOn-Knee: A Self-Aligning Knee Exoskeleton. In: International Conference on Rehabilitation Robotics; 2013. p. 996–1002
work page 2013
-
[72]
AssistOn-Ankle: A Reconfigurable Ankle Exoskeleton with Series-Elastic Actuation
Erdogan A, Celebi B, Satici AC, Patoglu V. AssistOn-Ankle: A Reconfigurable Ankle Exoskeleton with Series-Elastic Actuation. Autonomous Robots. 2016; p. 1–16
work page 2016
-
[73]
Survey of multi-objective optimization methods for engineering
Marler R, Arora JS. Survey of multi-objective optimization methods for engineering. Structural and Multidisciplinary Optimization. 2004;26:369–395. October 4, 2021 70/72
work page 2004
-
[74]
Introduction to multiobjective optimization: interactive approaches
Miettinen K, Ruiz F, Wierzbicki AP. Introduction to multiobjective optimization: interactive approaches. In: Multiobjective optimization. Springer
-
[75]
Pareto optimization or cascaded weighted sum: A comparison of concepts
Jakob W, Blume C. Pareto optimization or cascaded weighted sum: A comparison of concepts. Algorithms. 2014;7(1):166–185
work page 2014
-
[76]
Haimes Y. On a bicriterion formulation of the problems of integrated system identification and system optimization. IEEE transactions on systems, man, and cybernetics. 1971;1(3):296–297
work page 1971
-
[77]
Laumanns M, Thiele L, Zitzler E. An efficient, adaptive parameter variation scheme for metaheuristics based on the epsilon-constraint method. European Journal of Operational Research. 2006;169(3):932–942
work page 2006
-
[78]
On-constraint based methods for the generation of Pareto frontiers
Chircop K, Zammit-Mangion D. On-constraint based methods for the generation of Pareto frontiers. Journal of Mechanics Engineering and Automation. 2013;3(5):279–289
work page 2013
-
[79]
Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters
De Leva P. Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. Journal of biomechanics. 1996;29(9):1223–1230
work page 1996
-
[80]
Mechanics and energetics of level walking with powered ankle exoskeletons
Sawicki GS, Ferris DP. Mechanics and energetics of level walking with powered ankle exoskeletons. Journal of Experimental Biology. 2008;211(9):1402–1413
work page 2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.