Safe-RULE: Safe Reinforcement UnLEarning
Pith reviewed 2026-06-27 17:26 UTC · model grok-4.3
The pith
Safe-RULE removes the effects of poisoned data from offline safe reinforcement learning policies through targeted unlearning that preserves both performance and safety constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Safe-RULE is a reinforcement unlearning procedure that, given a poisoned offline dataset and a trained policy, produces a new policy whose behavior satisfies safety constraints and retains task performance by explicitly penalizing retention of poisoned-sample effects during the unlearning updates.
What carries the argument
The Safe-RULE unlearning objective that jointly optimizes task performance and safety-constraint satisfaction while erasing poisoned-sample influence.
If this is right
- Offline Safe RL agents can be repaired after poisoning without access to the live environment.
- Safety-critical policies trained on static datasets become more robust to training-time data attacks.
- Unlearning can serve as a post-training defense layer that does not require re-collecting clean data.
- The same unlearning loop can be applied whenever new poisoned samples are detected in an existing dataset.
Where Pith is reading between the lines
- The approach could be tested on datasets that contain both poisoned and naturally occurring unsafe trajectories to check whether unlearning distinguishes the two.
- If the unlearning step proves stable across different constraint formulations, it might generalize to other constrained learning settings beyond RL.
- Integration with continual-learning pipelines would allow periodic unlearning passes as new data arrives.
Load-bearing premise
Poisoned-sample effects can be isolated and removed by unlearning while still keeping both reward and safety performance intact without the original training environment or full retraining.
What would settle it
A controlled experiment in which, after Safe-RULE is applied to a known poisoned dataset, the resulting policy either violates the original safety constraints or shows substantially lower task return than the unpoisoned baseline.
Figures
read the original abstract
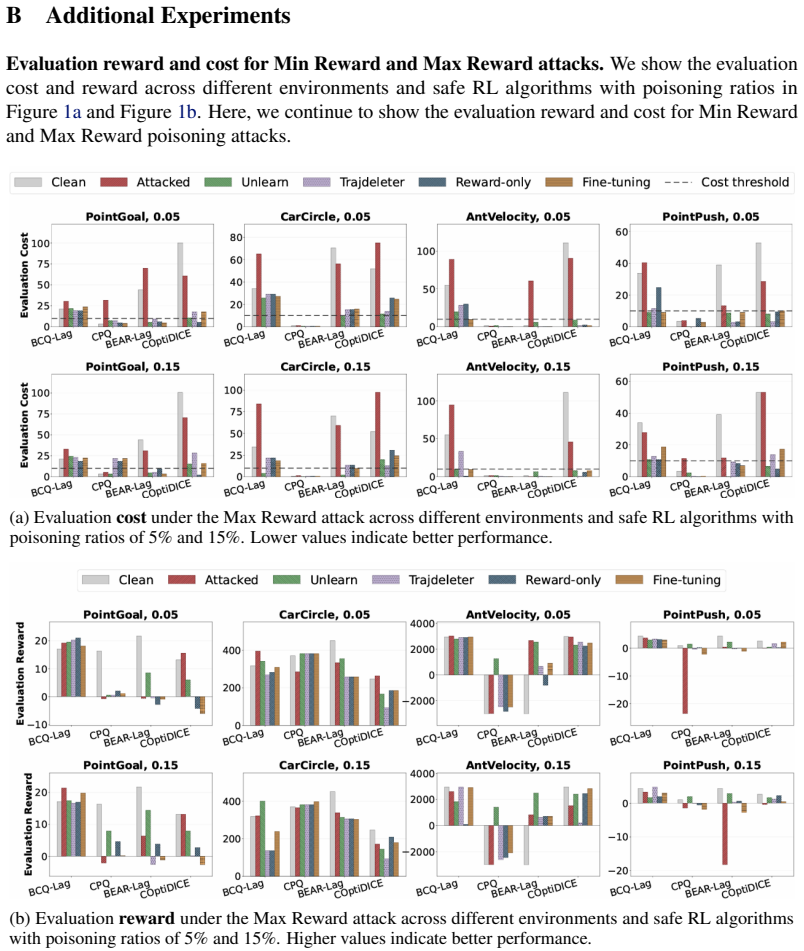
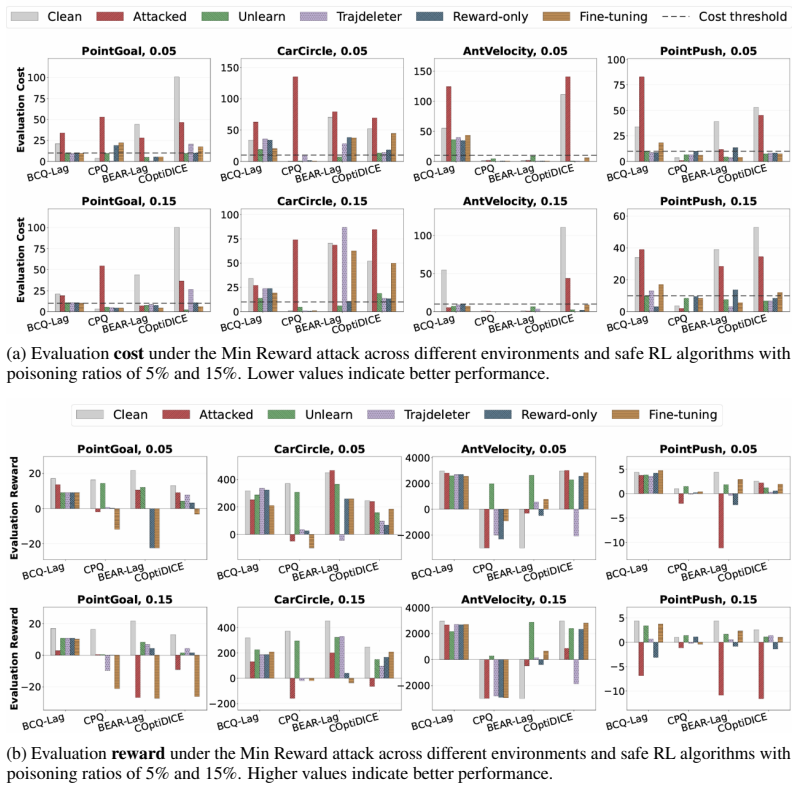
Offline safe reinforcement learning (Safe RL) enables policy learning without online interactions, making it suitable for safety-critical systems such as robotics systems. However, its reliance on static datasets exposes offline Safe RL to data poisoning attacks, where adversaries inject malicious samples that compromise safety and induce unsafe policy behavior. In this work, we propose a new learning paradigm, named safe reinforcement unlearning (Safe-RULE), used as a defense framework to remove the influence of poisoned data without retraining from scratch or requiring access to the original training environment. We further extend reinforcement unlearning to offline Safe RL by explicitly accounting for both task performance and safety constraints during the unlearning process. Experiments across benchmark Safe RL tasks demonstrate that our approach effectively enhances safety performance against data poisoning attacks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Safe-RULE, a new learning paradigm for safe reinforcement unlearning in offline Safe RL. It functions as a defense framework to remove the influence of poisoned data without retraining from scratch or requiring access to the original training environment. The approach extends reinforcement unlearning to offline Safe RL by explicitly accounting for both task performance and safety constraints during unlearning. Experiments across benchmark Safe RL tasks are stated to demonstrate that the method effectively enhances safety performance against data poisoning attacks.
Significance. If the method can be shown to achieve the claimed unlearning while preserving both performance and safety constraints, the work would address an important practical vulnerability in offline Safe RL for safety-critical applications such as robotics, offering an alternative to full retraining.
major comments (1)
- [Abstract] Abstract: The claim that 'Experiments across benchmark Safe RL tasks demonstrate that our approach effectively enhances safety performance against data poisoning attacks' is made without any methods, equations, data details, or results. This absence is load-bearing because the central claim of effective unlearning without original-environment access or full retraining rests entirely on the (unshown) empirical support.
Simulated Author's Rebuttal
We thank the referee for their review and the opportunity to clarify the role of the abstract. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that 'Experiments across benchmark Safe RL tasks demonstrate that our approach effectively enhances safety performance against data poisoning attacks' is made without any methods, equations, data details, or results. This absence is load-bearing because the central claim of effective unlearning without original-environment access or full retraining rests entirely on the (unshown) empirical support.
Authors: Abstracts are intentionally concise high-level summaries and do not contain methods, equations, or results; those elements appear in the main manuscript. The Safe-RULE formulation, including the objective that jointly optimizes task return and safety constraint satisfaction during unlearning, is derived in Section 3. The practical algorithm that performs the unlearning step without access to the original environment is given in Section 4 together with the relevant update rules. Section 5 specifies the benchmark environments, the data-poisoning attack model, the evaluation metrics (including safety violation rate and task return), and reports quantitative results showing that the unlearned policies recover safety performance while preserving task return. Because the empirical support is fully documented in the body of the paper, the abstract claim is not unsupported. revision: no
Circularity Check
No significant circularity detected
full rationale
The paper introduces Safe-RULE as a new paradigm for safe reinforcement unlearning in offline Safe RL to counter data poisoning. The abstract and description present a methodological proposal and experimental validation without any visible equations, derivations, parameter fittings, or self-citations that reduce claims to inputs by construction. No load-bearing steps match the enumerated circularity patterns (self-definitional, fitted predictions, etc.). The work is self-contained as a proposal with external benchmarks via experiments, yielding a normal non-finding.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Sinha, A
S. Sinha, A. Mandlekar, and A. Garg. S4rl: Surprisingly simple self-supervision for offline reinforcement learning in robotics. InConference on Robot Learning, pages 907–917. PMLR, 2022
2022
-
[2]
J. Li, X. Liu, B. Zhu, J. Jiao, M. Tomizuka, C. Tang, and W. Zhan. Guided online distillation: Promoting safe reinforcement learning by offline demonstration. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 7447–7454. IEEE, 2024
2024
- [3]
-
[4]
X. Fang, Q. Zhang, Y . Gao, and D. Zhao. Offline reinforcement learning for autonomous driving with real world driving data. In2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), pages 3417–3422. IEEE, 2022
2022
-
[5]
S. Gu, L. Yang, Y . Du, G. Chen, F. Walter, J. Wang, and A. Knoll. A review of safe reinforcement learning: Methods, theories and applications.IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024
2024
-
[6]
C. Gong, Z. Yang, Y . Bai, J. He, J. Shi, K. Li, A. Sinha, B. Xu, X. Hou, D. Lo, et al. Baffle: Hiding backdoors in offline reinforcement learning datasets. In2024 IEEE Symposium on Security and Privacy (SP), pages 2086–2104. IEEE, 2024
2086
- [7]
- [8]
-
[9]
Kiourti, K
P. Kiourti, K. Wardega, S. Jha, and W. Li. Trojdrl: evaluation of backdoor attacks on deep reinforcement learning. In2020 57th ACM/IEEE Design Automation Conference (DAC), pages 1–6. IEEE, 2020
2020
-
[10]
Jiang, M
S. Jiang, M. Liu, and F. Kong. Backdoor attacks on safe reinforcement learning-enabled cyber– physical systems.IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 43(11):4093–4104, 2024
2024
- [11]
- [12]
-
[13]
E. Farrell, Y .-T. Lau, and A. Conmy. Applying sparse autoencoders to unlearn knowledge in language models.arXiv preprint arXiv:2410.19278, 2024
-
[14]
A. Deeb and F. Roger. Do unlearning methods remove information from language model weights?arXiv preprint arXiv:2410.08827, 2024
-
[15]
A. Sheshadri, A. Ewart, P. Guo, A. Lynch, C. Wu, V . Hebbar, H. Sleight, A. C. Stickland, E. Perez, D. Hadfield-Menell, et al. Latent adversarial training improves robustness to persistent harmful behaviors in llms.arXiv preprint arXiv:2407.15549, 2024
-
[16]
M. Isonuma and I. Titov. Unlearning traces the influential training data of language models. arXiv preprint arXiv:2401.15241, 2024
-
[17]
Ouyang, J
L. Ouyang, J. Wu, X. Jiang, D. Almeida, C. Wainwright, P. Mishkin, C. Zhang, S. Agarwal, K. Slama, A. Ray, et al. Training language models to follow instructions with human feedback. Advances in neural information processing systems, 35:27730–27744, 2022. 9
2022
-
[18]
À. P. Vidal, A. S. Johansen, M. N. Jahromi, S. Escalera, K. Nasrollahi, and T. B. Moeslund. Verifying machine unlearning with explainable ai. InInternational Conference on Pattern Recognition, pages 458–473. Springer, 2024
2024
- [19]
- [20]
-
[21]
J. Jang, D. Yoon, S. Yang, S. Cha, M. Lee, L. Logeswaran, and M. Seo. Knowledge unlearning for mitigating privacy risks in language models. InProceedings of the 61st Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pages 14389–14408, 2023
2023
-
[22]
Editing Models with Task Arithmetic
G. Ilharco, M. T. Ribeiro, M. Wortsman, S. Gururangan, L. Schmidt, H. Hajishirzi, and A. Farhadi. Editing models with task arithmetic.arXiv preprint arXiv:2212.04089, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[23]
Zhang, J
J. Zhang, J. Liu, J. He, et al. Composing parameter-efficient modules with arithmetic operation. Advances in Neural Information Processing Systems, 36:12589–12610, 2023
2023
-
[24]
arXiv preprint arXiv:2408.06223 , year =
D. Huu-Tien, T.-T. Pham, H. Thanh-Tung, and N. Inoue. On effects of steering latent represen- tation for large language model unlearning.arXiv preprint arXiv:2408.06223, 2024
-
[25]
Rosati, J
D. Rosati, J. Wehner, K. Williams, L. Bartoszcze, R. Gonzales, S. Majumdar, H. Sajjad, F. Rudzicz, et al. Representation noising: A defence mechanism against harmful finetuning. Advances in Neural Information Processing Systems, 37:12636–12676, 2024
2024
-
[26]
N. Li, A. Pan, A. Gopal, S. Yue, D. Berrios, A. Gatti, J. D. Li, A.-K. Dombrowski, S. Goel, L. Phan, et al. The wmdp benchmark: Measuring and reducing malicious use with unlearning. arXiv preprint arXiv:2403.03218, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[27]
Behzadan and A
V . Behzadan and A. Munir. Vulnerability of deep reinforcement learning to policy induction attacks. InMachine Learning and Data Mining in Pattern Recognition: 13th International Conference, MLDM 2017, New York, NY, USA, July 15-20, 2017, Proceedings 13, pages 262–275. Springer, 2017
2017
-
[28]
Huang and Q
Y . Huang and Q. Zhu. Deceptive reinforcement learning under adversarial manipulations on cost signals. InDecision and Game Theory for Security: 10th International Conference, GameSec 2019, Stockholm, Sweden, October 30–November 1, 2019, Proceedings 10, pages 217–237. Springer, 2019
2019
-
[29]
Rakhsha, G
A. Rakhsha, G. Radanovic, R. Devidze, X. Zhu, and A. Singla. Policy teaching via environment poisoning: Training-time adversarial attacks against reinforcement learning. InInternational Conference on Machine Learning, pages 7974–7984. PMLR, 2020
2020
-
[30]
Liu and L
G. Liu and L. Lai. Provably efficient black-box action poisoning attacks against reinforcement learning.Advances in Neural Information Processing Systems, 34:12400–12410, 2021
2021
- [31]
- [32]
- [33]
-
[34]
H. Xu, X. Zhan, and X. Zhu. Constraints penalized q-learning for safe offline reinforcement learning. InProceedings of the AAAI Conference on Artificial Intelligence, volume 36, pages 8753–8760, 2022
2022
- [35]
-
[36]
J. Ji, B. Zhang, J. Zhou, X. Pan, W. Huang, R. Sun, Y . Geng, Y . Zhong, J. Dai, and Y . Yang. Safety gymnasium: A unified safe reinforcement learning benchmark.Advances in Neural Information Processing Systems, 36, 2023
2023
- [37]
-
[38]
Fujimoto, D
S. Fujimoto, D. Meger, and D. Precup. Off-policy deep reinforcement learning without explo- ration. InInternational conference on machine learning, pages 2052–2062. PMLR, 2019
2052
-
[39]
Kumar, J
A. Kumar, J. Fu, M. Soh, G. Tucker, and S. Levine. Stabilizing off-policy q-learning via bootstrapping error reduction.Advances in neural information processing systems, 32, 2019. 11 A Theoretical Analysis In this section, we provide a theoretical explanation for two design choices in Safe-RULE: the reward reference ¯Qr and the safety margin σ in the forg...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.