Virtues of Ordered Chaos: Planning with Topple Actions in Tabletop Stack Rearrangement
Pith reviewed 2026-05-20 11:05 UTC · model grok-4.3
The pith
Interleaving topple actions with pick-and-place reduces execution time in tabletop stack rearrangement.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Using a novel aggregating gadget for topple within a directed graphical abstraction, task planning for stack rearrangement reduces to a variant of the pebble motion problem, permitting plans that interleave pick-and-place and topple actions to achieve faster execution than pick-and-place only.
What carries the argument
The novel aggregating gadget for topple, which enables modeling the action in the graphical abstraction so that toppling can compress long sequences of intermediate object relocations in the pebble-motion planning.
If this is right
- Computed plans interleave topple and pick-and-place actions based on the specific rearrangement problem.
- Execution in IsaacSim simulation is faster than using solely pick-and-place actions.
- Similar abstractions can model other aggregating actions such as scoop.
- The method provides benefits for efficient object manipulation in automation applications.
Where Pith is reading between the lines
- This abstraction approach could be tested with physical robots to check transferability beyond simulation.
- Extending the gadget to more complex stacking scenarios might reveal limits of the pebble-motion modeling.
- Other nonprehensile actions in robotics could benefit from analogous directed graph gadgets for planning.
- Integrating this into broader task planners might improve efficiency in cluttered tabletop environments.
Load-bearing premise
The directed graphical abstraction and aggregating gadget for topple produce plans that remain physically valid and executable when transferred from the pebble-motion model to actual robot actions in the IsaacSim environment.
What would settle it
Running the generated plans in the IsaacSim environment and observing whether all topple actions execute without unintended object movements or instabilities that the model did not predict.
Figures





read the original abstract
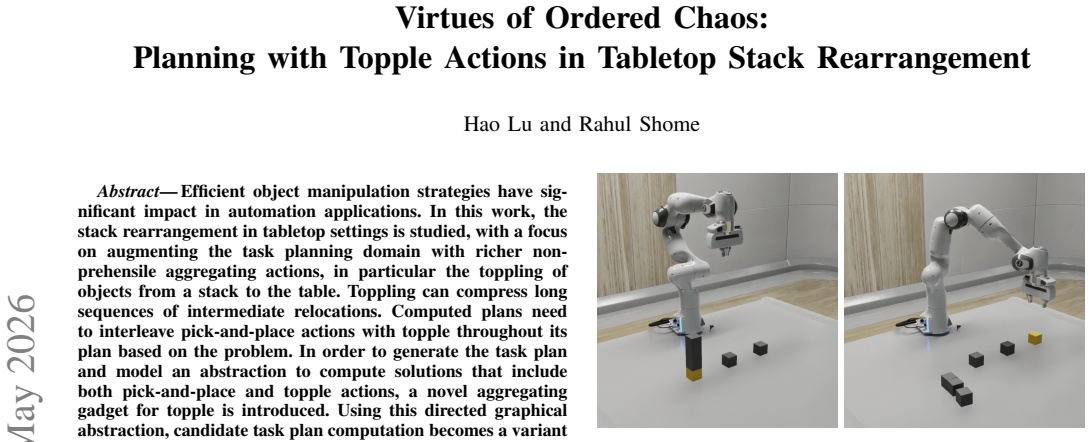
Efficient object manipulation strategies have significant impact in automation applications. In this work, the stack rearrangement in tabletop settings is studied, with a focus on augmenting the task planning domain with richer nonprehensile aggregating actions, in particular the toppling of objects from a stack to the table. Toppling can compress long sequences of intermediate relocations. Computed plans need to interleave pick-and-place actions with topple throughout its plan based on the problem. In order to generate the task plan and model an abstraction to compute solutions that include both pick-and-place and topple actions, a novel aggregating gadget for topple is introduced. Using this directed graphical abstraction, candidate task plan computation becomes a variant of the pebble motion problem, treating objects as pebbles. Benchmarks are then reported in a IsaacSim-based physics simulation. Results highlight clear benefits of achieving faster execution than solely using pick-and-place actions. Though this work primarily investigates the topple action, we demonstrate that similar abstractions can model other aggregating actions of interest, like scoop. The current work provides a preliminary, strong indication of the promising benefits of abstractions for rich object interactions in manipulation applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies stack rearrangement on tabletops by augmenting task planning with nonprehensile topple actions in addition to pick-and-place. It introduces a novel aggregating gadget inside a directed graphical abstraction that reduces candidate plan generation to a pebble-motion problem on objects treated as pebbles. Plans interleaving topple and pick-and-place are computed and transferred to an IsaacSim physics simulator; the authors report faster execution times than pick-and-place-only baselines and sketch extensions to other aggregating actions such as scooping.
Significance. If the generated plans remain kinematically and dynamically valid when instantiated with real robot trajectories and object geometries, the work supplies a concrete, reusable abstraction for incorporating nonprehensile primitives into combinatorial manipulation planning. The pebble-motion reduction and the explicit gadget construction are technically clean contributions that could generalize beyond toppling.
major comments (2)
- [§3] §3 (Aggregating gadget and graphical abstraction): the gadget encodes topple as a discrete state transition on an implicit graph, yet the manuscript does not specify how stack height, contact normals, friction, or object geometry are (or are not) folded into the transition rules. Because these parameters are absent from the pebble-motion model, it is possible for the planner to emit topple sequences that succeed in the abstract graph but require unmodeled recovery motions or fail outright in IsaacSim, directly undermining the reported execution-time gains.
- [Benchmarks / Results] Benchmarks / Results section: the claim of “clear benefits” and “faster execution” is central, yet the manuscript supplies no tabulated execution times, success rates, number of trials, or statistical comparison against the pick-and-place baseline. Without these data the quantitative advantage cannot be verified and the transfer from abstract plan to simulator remains unproven.
minor comments (2)
- Notation for the pebble-motion variant should be defined more explicitly (e.g., state space, move set, and cost function) so that the reduction from the gadget-augmented graph is reproducible.
- Add citations to prior pebble-motion literature in robotics and to existing nonprehensile manipulation planners to situate the novelty of the aggregating gadget.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and indicate the revisions planned for the next version of the manuscript.
read point-by-point responses
-
Referee: [§3] §3 (Aggregating gadget and graphical abstraction): the gadget encodes topple as a discrete state transition on an implicit graph, yet the manuscript does not specify how stack height, contact normals, friction, or object geometry are (or are not) folded into the transition rules. Because these parameters are absent from the pebble-motion model, it is possible for the planner to emit topple sequences that succeed in the abstract graph but require unmodeled recovery motions or fail outright in IsaacSim, directly undermining the reported execution-time gains.
Authors: We appreciate the referee pointing out the need for greater clarity on the physical assumptions underlying the aggregating gadget. The gadget is formulated as a discrete combinatorial abstraction that reduces planning to a pebble-motion problem; the transition rules implicitly assume rigid bodies, a flat table surface, and friction sufficient to enable toppling without unintended sliding. Physical feasibility is verified after plan generation by executing the sequence in the IsaacSim simulator. We agree that an explicit statement of these modeling assumptions and a discussion of potential mismatches with simulation would improve the section. In the revised manuscript we will expand §3 with a dedicated paragraph on assumptions regarding stack height, contact geometry, and friction, together with a brief note on how the simulator serves as the final validity check. revision: yes
-
Referee: [Benchmarks / Results] Benchmarks / Results section: the claim of “clear benefits” and “faster execution” is central, yet the manuscript supplies no tabulated execution times, success rates, number of trials, or statistical comparison against the pick-and-place baseline. Without these data the quantitative advantage cannot be verified and the transfer from abstract plan to simulator remains unproven.
Authors: We concur that the quantitative claims would be stronger if supported by tabulated data and statistical analysis. Although the manuscript states that plans were transferred to IsaacSim and produced faster execution than the pick-and-place baseline, we did not include explicit tables, trial counts, success rates, or statistical comparisons. This was an oversight in presentation. In the revised version we will augment the Benchmarks / Results section with a table reporting mean execution times, standard deviations, success rates over repeated trials, and direct numerical comparison to the baseline, thereby making the reported gains verifiable and the simulator transfer explicit. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces a novel aggregating gadget as an independent modeling abstraction that reduces topple-inclusive planning to a pebble-motion variant on a directed graph. Candidate plans are generated from this model and then transferred to IsaacSim for empirical benchmarking of execution time. No equations, parameters, or results are shown to reduce to their own inputs by construction; there are no fitted inputs renamed as predictions, no load-bearing self-citations, and no self-definitional loops. The reported speed benefits are external simulation outcomes, rendering the chain self-contained against physical benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Toppling can be faithfully represented by a directed graphical aggregating gadget that aggregates multiple objects in one action.
invented entities (1)
-
Aggregating gadget for topple
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Complexity Results and Fast Methods for Optimal Tabletop Rearrangement with Overhand Grasps
S. D. Han, N. M. Stiffler, A. Krontiris, K. Bekris, and J. Yu, “Com- plexity results and fast methods for optimal tabletop rearrangement with overhand grasps,”arXiv:1711.07369, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[2]
Efficient, high- quality stack rearrangement,
S. D. Han, N. M. Stiffler, K. E. Bekris, and J. Yu, “Efficient, high- quality stack rearrangement,”IEEE RAL, vol. 3, no. 3, pp. 1608–1615, 2018
work page 2018
-
[3]
A framework for push-grasping in clutter,
M. Dogar and S. Srinivasa, “A framework for push-grasping in clutter,” Robotics: Science and systems VII, vol. 1, pp. 65–72, 2011
work page 2011
-
[4]
Large-scale multi-object rear- rangement,
E. Huang, Z. Jia, and M. T. Mason, “Large-scale multi-object rear- rangement,” in2019 international conference on robotics and automa- tion (ICRA). IEEE, 2019, pp. 211–218
work page 2019
-
[5]
Persistent homology for effective non-prehensile manipula- tion,
E. R. Vieira, D. Nakhimovich, K. Gao, R. Wang, J. Yu, and K. E. Bekris, “Persistent homology for effective non-prehensile manipula- tion,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 1918–1924
work page 2022
-
[6]
K. M. Lynch, “Toppling manipulation,” inProceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), vol. 4. IEEE, 1999, pp. 2551–2557
work page 1999
-
[7]
An incremental constraint-based framework for task and motion planning,
N. T. Dantam, Z. K. Kingston, S. Chaudhuri, and L. E. Kavraki, “An incremental constraint-based framework for task and motion planning,” The International Journal of Robotics Research, vol. 37, no. 10, pp. 1134–1151, 2018
work page 2018
-
[8]
Task and motion planning for execution in the real,
T. Pan, R. Shome, and L. E. Kavraki, “Task and motion planning for execution in the real,”IEEE Transactions on Robotics, vol. 40, pp. 3356–3371, 2024
work page 2024
-
[9]
Rearrangement of multiple movable objects-integration of global and local planning methodology,
J. Ota, “Rearrangement of multiple movable objects-integration of global and local planning methodology,” inICRA, vol. 2, 2004
work page 2004
-
[10]
Manipula- tion planning among movable obstacles,
M. Stilman, J.-U. Schamburek, J. Kuffner, and T. Asfour, “Manipula- tion planning among movable obstacles,” inICRA, 2007
work page 2007
-
[11]
Synchronized multi-arm rearrangement guided by mode graphs with capacity constraints,
R. Shome and K. E. Bekris, “Synchronized multi-arm rearrangement guided by mode graphs with capacity constraints,” inInternational Workshop on the Algorithmic Foundations of Robotics. Springer, 2020, pp. 243–260
work page 2020
-
[12]
Towards robust product packing with a minimalistic end-effector,
R. Shome, W. N. Tang, C. Song, C. Mitash, H. Kourtev, J. Yu, A. Boularias, and K. E. Bekris, “Towards robust product packing with a minimalistic end-effector,” inIEEE International Conference on Robotics and Automation (ICRA), 2019
work page 2019
-
[13]
Decision making in joint push-grasp action space for large-scale object sorting,
Z. Pan and K. Hauser, “Decision making in joint push-grasp action space for large-scale object sorting,” in2021 IEEE international conference on robotics and automation (ICRA). IEEE, 2021, pp. 6199–6205
work page 2021
-
[14]
Integrated task and motion planning,
C. R. Garrett, R. Chitnis, R. Holladay, B. Kim, T. Silver, L. P. Kael- bling, and T. Lozano-P ´erez, “Integrated task and motion planning,” Annual Review of Control, Robotics, and Autonomous Systems, vol. 4, no. 1, pp. 265–293, 2021
work page 2021
-
[15]
Combined heuristic task and motion planning for bi-manual robots,
A. Akbari, F. Lagriffoul, and J. Rosell, “Combined heuristic task and motion planning for bi-manual robots,”Autonomous Robots, pp. 1–16, 2018
work page 2018
-
[16]
Ffrob: Leverag- ing symbolic planning for efficient task and motion planning,
C. R. Garrett, T. Lozano-Perez, and L. P. Kaelbling, “Ffrob: Leverag- ing symbolic planning for efficient task and motion planning,”IJRR, vol. 37, no. 1, pp. 104–136, 2018
work page 2018
-
[17]
Hierarchical Task and Motion Planning in the Now,
L. P. Kaelbling and T. Lozano-P ´erez, “Hierarchical Task and Motion Planning in the Now,” inICRA, 2011
work page 2011
-
[18]
Anytime integrated task and motion policies for stochastic environments,
N. Shah, D. K. Vasudevan, K. Kumar, P. Kamojjhala, and S. Sri- vastava, “Anytime integrated task and motion policies for stochastic environments,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 9285–9291
work page 2020
-
[19]
Failure is an option: task and motion planning with failing executions,
T. Pan, A. M. Wells, R. Shome, and L. E. Kavraki, “Failure is an option: task and motion planning with failing executions,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 1947–1953
work page 2022
-
[20]
A. Curtis, X. Fang, L. P. Kaelbling, T. Lozano-P ´erez, and C. R. Garrett, “Long-horizon manipulation of unknown objects via task and motion planning with estimated Affordances,” in2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 1940– 1946
work page 2022
-
[21]
Diffusion policy: Visuomotor policy learning via ac- tion diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via ac- tion diffusion,”The International Journal of Robotics Research, p. 02783649241273668, 2023
work page 2023
-
[22]
Morals: Analysis of high-dimensional robot controllers via topological tools in a latent space,
E. R. Vieira, A. Sivaramakrishnan, S. Tangirala, E. Granados, K. Mis- chaikow, and K. E. Bekris, “Morals: Analysis of high-dimensional robot controllers via topological tools in a latent space,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 27–33
work page 2024
-
[23]
Gurobi Optimizer Reference Manual,
Gurobi Optimization, LLC, “Gurobi Optimizer Reference Manual,” 2023
work page 2023
-
[24]
Robot operating system 2: Design, architecture, and uses in the wild,
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, and W. Woodall, “Robot operating system 2: Design, architecture, and uses in the wild,” Science Robotics, vol. 7, no. 66, p. eabm6074, 2022
work page 2022
-
[25]
Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study
D. Coleman, I. Sucan, S. Chitta, and N. Correll, “Reducing the barrier to entry of complex robotic software: a MoveIT! case study,”arXiv preprint arXiv:1404.3785, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[26]
The open motion planning library,
I. A. Sucan, M. Moll, and L. E. Kavraki, “The open motion planning library,”IEEE Robotics & Automation Magazine, vol. 19, no. 4, pp. 72–82, 2012
work page 2012
-
[27]
Rrt-connect: An efficient approach to single-query path planning,
J. Kuffner and S. LaValle, “Rrt-connect: An efficient approach to single-query path planning,” inProceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automa- tion. Symposia Proceedings (Cat. No.00CH37065), vol. 2, 2000, pp. 995–1001 vol.2
work page 2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.