Path Planning in Physically Viable World Models
Pith reviewed 2026-07-02 11:30 UTC · model grok-4.3
The pith
Physically viable world models reveal long-horizon route failures in robot navigation that static maps miss.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
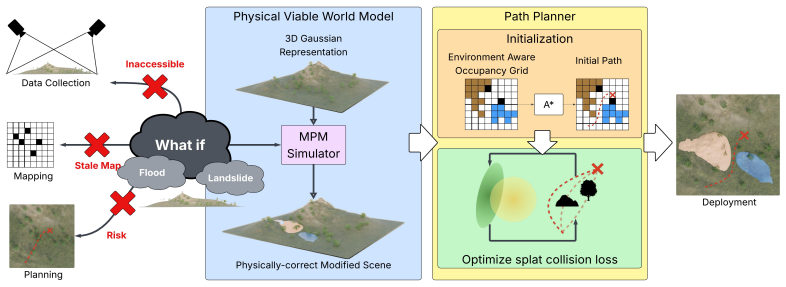
The system augments reconstructed 3D Gaussian splat scenes with physics-based simulation to generate physically modified versions of the environment. A terrain-aware planner then accounts for the simulated events, obstacles, and deformations. This enables evaluation of whether planned routes remain feasible under future terrain changes, exposing long-horizon route failures and rerouting behavior not apparent when planning only on the original reconstructed environment.
What carries the argument
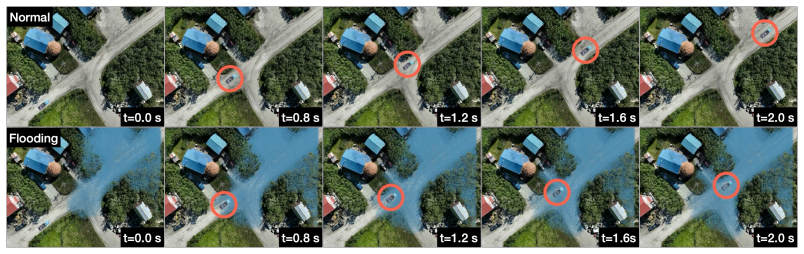
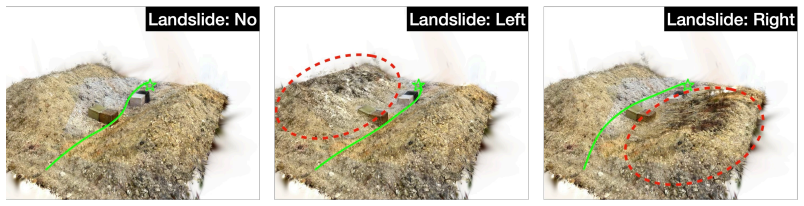
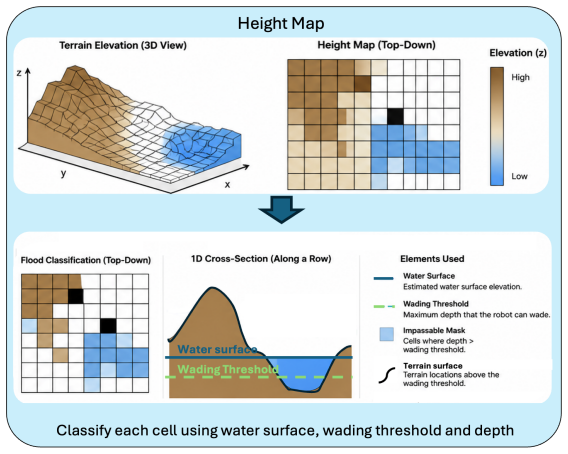
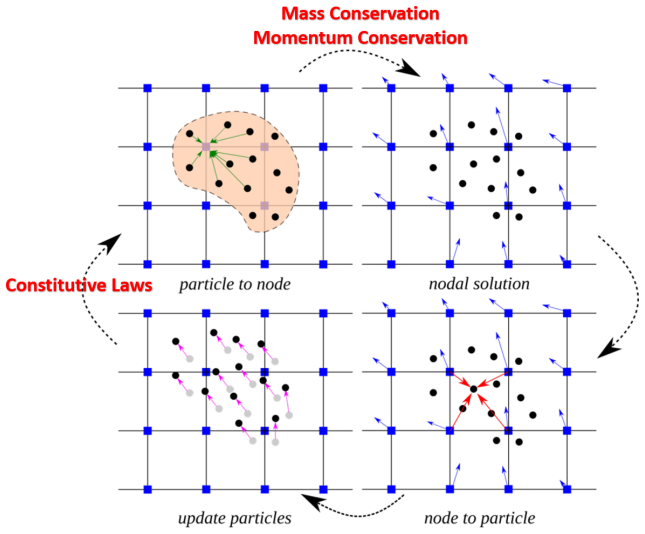
The physically viable world model that augments 3D reconstructions with physics-based simulation of terrain changes such as flooding.
If this is right
- Planned routes may fail under simulated terrain changes even if feasible on the original map.
- The planner can identify rerouting needs before deployment in changing environments.
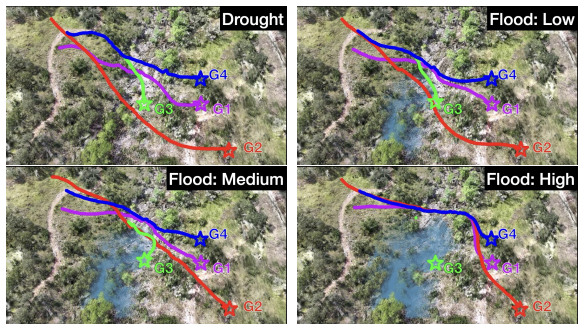
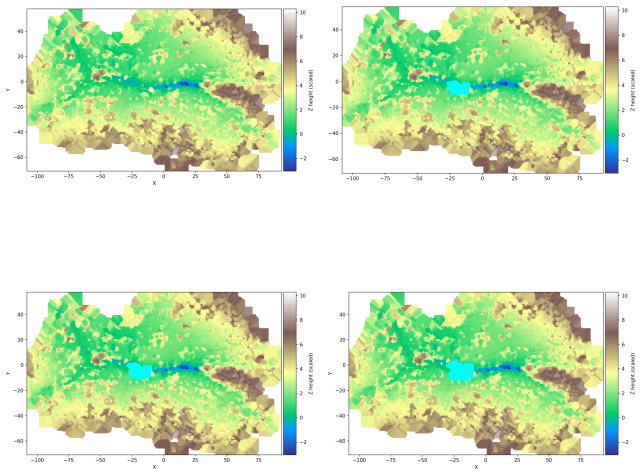
- Evaluation on multiple flooding severity levels measures changes in route and mission feasibility.
- Robots can avoid committing to routes that become unsafe after physical events.
Where Pith is reading between the lines
- Similar simulations could apply to other dynamic factors like seasonal vegetation or erosion.
- Integration with online updates might allow continuous replanning as real changes occur.
- This method reduces the need for frequent remapping of large sites.
Load-bearing premise
The physics simulation of terrain changes produces modified scenes realistic enough to match actual outcomes at the field site.
What would settle it
Measuring actual route feasibility after real flooding at the Texas site and comparing it to the simulated predictions.
Figures
read the original abstract
Robots deployed in unstructured outdoor environments often plan from scene reconstructions collected before deployment because operators cannot remap large or remote sites before every mission. As a result, robots must make long-horizon planning decisions using stale maps that assume the terrain remains unchanged, even though physical changes to the environment may render previously feasible routes unsafe or unreachable at execution time. We present a physically viable world model for evaluating what-if queries for robot navigation under future terrain change. The system augments reconstructed 3D Gaussian splat scenes with physics-based simulation to generate physically modified versions of the same environment without recollecting sensor data or rebuilding the map. We then implement a terrain-aware planner that accounts for physical events, obstacles, and deformations that are simulated by the world model. This allows robots and human operators to evaluate whether planned routes remain feasible before committing to a planned route, particularly in constrained environments where retreat or recovery may become impossible once conditions change. We evaluate the system on a real outdoor field site in Central Texas using simulated flooding across multiple severity levels. We measure route and mission feasibility as terrain conditions deteriorate under physically simulated interventions. Our results show that physically viable world models expose long-horizon route failures and rerouting behavior that are not apparent when planning only on the original reconstructed environment, allowing robots to evaluate how future terrain changes may affect route feasibility before deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes augmenting 3D Gaussian splat reconstructions of outdoor environments with physics-based simulation to create 'physically viable world models' that support what-if queries about terrain changes (e.g., flooding, deformations). A terrain-aware planner then evaluates route and mission feasibility under these simulated changes. The central claim is that this approach reveals long-horizon route failures and necessary reroutes that are invisible when planning solely on the original pre-deployment reconstruction. Evaluation consists of simulated flooding at multiple severity levels on a real Central Texas field site, with feasibility measured under the modified scenes.
Significance. If the physics simulation produces scenes whose traversability matches real-world terrain evolution, the method would offer a practical way to assess deployment risks in dynamic outdoor settings without repeated remapping. The use of existing reconstructions and external physics engines is a pragmatic strength. However, the absence of any reported quantitative validation of the simulated changes against actual physical outcomes at the site substantially reduces the significance of the reported feasibility results.
major comments (2)
- [Evaluation] Evaluation section: the central claim that physically viable world models 'expose long-horizon route failures and rerouting behavior that are not apparent when planning only on the original reconstructed environment' rests on the assumption that the physics-based flooding and deformation outputs produce modified scenes whose feasibility matches real terrain evolution. No quantitative comparison (water-depth maps, post-event DEMs, traversability measurements, or error metrics) to actual physical interventions at the Central Texas site is reported, leaving open the possibility that observed failures are simulation artifacts.
- [Evaluation] Evaluation section: no quantitative metrics, success rates, error analysis, or details on how route/mission feasibility was measured (e.g., binary feasibility, cost thresholds, or simulation parameters) are provided despite the abstract stating that 'we measure route and mission feasibility as terrain conditions deteriorate.' This absence makes it impossible to assess the magnitude or statistical reliability of the claimed difference between original and modified scenes.
minor comments (2)
- [Abstract] The abstract would be strengthened by including at least one concrete quantitative result (e.g., percentage of routes that become infeasible) rather than a purely qualitative statement of findings.
- [Method] Notation for the terrain-aware planner and the interface between the Gaussian splat and the physics simulator should be introduced with explicit equations or pseudocode in the method section to improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for their thoughtful review and for highlighting important aspects of the evaluation. We respond to each major comment below and note where revisions or clarifications can be made.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section: the central claim that physically viable world models 'expose long-horizon route failures and rerouting behavior that are not apparent when planning only on the original reconstructed environment' rests on the assumption that the physics-based flooding and deformation outputs produce modified scenes whose feasibility matches real terrain evolution. No quantitative comparison (water-depth maps, post-event DEMs, traversability measurements, or error metrics) to actual physical interventions at the Central Texas site is reported, leaving open the possibility that observed failures are simulation artifacts.
Authors: We acknowledge that the evaluation uses simulated flooding without direct quantitative validation against real post-event measurements at the site. The work focuses on demonstrating the planning consequences of what-if terrain modifications generated from an existing reconstruction and a standard physics engine, rather than on simulator validation. Because no real flooding or deformation data were collected at the Central Texas site, we cannot provide such comparisons. We will add an explicit limitations paragraph discussing the reliance on simulation fidelity and the distinction between demonstrating planning sensitivity and claiming predictive accuracy for real events. revision: partial
-
Referee: [Evaluation] Evaluation section: no quantitative metrics, success rates, error analysis, or details on how route/mission feasibility was measured (e.g., binary feasibility, cost thresholds, or simulation parameters) are provided despite the abstract stating that 'we measure route and mission feasibility as terrain conditions deteriorate.' This absence makes it impossible to assess the magnitude or statistical reliability of the claimed difference between original and modified scenes.
Authors: Feasibility is assessed by executing the terrain-aware planner on each modified scene and recording whether a collision-free path satisfying the mission constraints exists. We will expand the evaluation section to include the precise feasibility criterion (binary existence of a feasible path), the cost threshold used for replanning, the physics-simulation parameters (e.g., water level increments, material properties), and any aggregate statistics across the severity levels shown in the figures. This will allow readers to better gauge the magnitude of the observed differences. revision: yes
- Absence of quantitative validation of simulated flooding against actual physical outcomes or post-event data at the Central Texas site, which was not collected during the study.
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper describes a system that augments pre-deployment 3D Gaussian reconstructions with external physics-based simulation to generate modified scenes, then applies a terrain-aware planner and compares feasibility metrics on original vs. simulated scenes. No equations, parameters, or claims reduce by construction to fitted inputs or self-citations; the evaluation relies on simulated interventions whose outputs are treated as independent inputs to the planner. The central empirical observation (long-horizon failures visible only under simulated change) follows directly from running the planner on two distinct scene versions without tautological redefinition. This is the most common honest non-finding for system-description papers that do not derive predictions from their own fitted quantities.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Physics simulation accurately models real terrain changes such as flooding and deformations for the purpose of route evaluation
Reference graph
Works this paper leans on
-
[1]
A. J. Thorpe, S. Tretiakov, C.-H. Hsiao, S. A. Low, X. Li, H. Iqbal, N. P. Bhatt, U. Topcu, and K. Kumar. Physically viable world models: A case for query-conditioned embodied ai, 2026. URLhttps://arxiv.org/abs/2605.30542
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[2]
M. G. Andreu, V . Klemm, V . Patil, J. Tordesillas, and M. Hutter. Foci: Trajectory optimization on gaussian splats. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 1884–1891. IEEE, 2025
2025
-
[3]
J. Frey, M. Patel, D. Atha, J. Nubert, D. Fan, A. Agha, C. Padgett, P. Spieler, M. Hutter, and S. Khattak. Roadrunner—learning traversability estimation for autonomous off-road driving. IEEE Transactions on Field Robotics, 1:192–212, 2024. doi:10.1109/TFR.2024.3464369
- [4]
-
[5]
M. G. Castro, S. Triest, W. Wang, J. M. Gregory, F. Sanchez, J. G. Rogers, and S. Scherer. How does it feel? self-supervised costmap learning for off-road vehicle traversability. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 931–938, 2023. doi:10.1109/ICRA48891.2023.10160856
-
[6]
X. Meng, N. Hatch, A. Lambert, A. Li, N. Wagener, M. Schmittle, J. Lee, W. Yuan, Z. Chen, S. Deng, G. Okopal, D. Fox, B. Boots, and A. Shaban. TerrainNet: Visual Modeling of Com- plex Terrain for High-speed, Off-road Navigation. InProceedings of Robotics: Science and Systems, Daegu, Republic of Korea, July 2023. doi:10.15607/RSS.2023.XIX.103
-
[7]
J. Pentzer, S. Brennan, and K. Reichard. On-line estimation of vehicle motion and power model parameters for skid-steer robot energy use prediction. In2014 American Control Conference, pages 2786–2791, 2014. doi:10.1109/ACC.2014.6859073
-
[8]
Kumar, Z
A. Kumar, Z. Fu, D. Pathak, and J. Malik. RMA: Rapid motor adaptation for legged robots. In Robotics: Science and Systems, 2021
2021
- [9]
-
[10]
W. Ward, S. Etter, J. Quattrociocchi, C. Ellis, A. J. Thorpe, and U. Topcu. Zero to autonomy in real-time: Online adaptation of dynamics in unstructured environments, 2026. URLhttps: //arxiv.org/abs/2509.12516
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[11]
Williams, A
G. Williams, A. Aldrich, and E. A. Theodorou. Model predictive path integral control: From theory to parallel computation.Journal of Guidance, Control, and Dynamics, 40(2):344–357,
-
[12]
URLhttps://doi.org/10.2514/1.G001921
doi:10.2514/1.G001921. URLhttps://doi.org/10.2514/1.G001921
-
[13]
G. Williams, P. Drews, B. Goldfain, J. M. Rehg, and E. A. Theodorou. Information-theoretic model predictive control: Theory and applications to autonomous driving.Trans. Rob., 34(6): 1603–1622, Dec. 2018. ISSN 1552-3098. doi:10.1109/TRO.2018.2865891. URLhttps: //doi.org/10.1109/TRO.2018.2865891
-
[14]
C. Finn, P. Abbeel, and S. Levine. Model-agnostic meta-learning for fast adaptation of deep networks. In D. Precup and Y . W. Teh, editors,Proceedings of the 34th International Con- ference on Machine Learning, volume 70 ofProceedings of Machine Learning Research, pages 1126–1135. PMLR, 06–11 Aug 2017. URLhttps://proceedings.mlr.press/ v70/finn17a.html. 9
2017
-
[15]
Clavera, A
I. Clavera, A. Nagabandi, S. Liu, R. S. Fearing, P. Abbeel, S. Levine, and C. Finn. Learning to adapt in dynamic, real-world environments through meta-reinforcement learning. InInter- national Conference on Learning Representations, 2019. URLhttps://openreview.net/ forum?id=HyztsoC5Y7
2019
- [16]
-
[17]
Adamkiewicz, T
M. Adamkiewicz, T. Chen, A. Caccavale, R. Gardner, P. Culbertson, J. Bohg, and M. Schwa- ger. Vision-only robot navigation in a neural radiance world.IEEE Robotics and Automation Letters, 7(2):4606–4613, 2022
2022
-
[18]
T. Chen, P. Culbertson, and M. Schwager. Catnips: Collision avoidance through neural implicit probabilistic scenes.IEEE Transactions on Robotics, 40:2712–2728, 2024
2024
-
[19]
T. Chen, O. Shorinwa, J. Bruno, A. Swann, J. Yu, W. Zeng, K. Nagami, P. Dames, and M. Schwager. Splat-nav: Safe real-time robot navigation in gaussian splatting maps.IEEE Transactions on Robotics, 2025
2025
-
[20]
D. Ha and J. Schmidhuber. World models.arXiv preprint arXiv:1803.10122, 2(3):440, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[21]
Hafner, J
D. Hafner, J. Pasukonis, J. Ba, and T. Lillicrap. Mastering diverse control tasks through world models.Nature, 640(8059):647–653, 2025
2025
-
[22]
Hafner, T
D. Hafner, T. Lillicrap, I. Fischer, R. Villegas, D. Ha, H. Lee, and J. Davidson. Learning latent dynamics for planning from pixels. InInternational conference on machine learning, pages 2555–2565. PMLR, 2019
2019
-
[23]
V-JEPA 2: Self-Supervised Video Models Enable Understanding, Prediction and Planning
M. Assran, A. Bardes, D. Fan, Q. Garrido, R. Howes, M. Muckley, A. Rizvi, C. Roberts, K. Sinha, A. Zholus, et al. V-jepa 2: Self-supervised video models enable understanding, prediction and planning.arXiv preprint arXiv:2506.09985, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[24]
J. Bruce, M. Dennis, A. Edwards, J. Parker-Holder, Y . Shi, E. Hughes, M. Lai, A. Mavalankar, R. Steigerwald, C. Apps, Y . Aytar, S. Bechtle, F. Behbahani, S. Chan, N. Heess, L. Gonzalez, S. Osindero, S. Ozair, S. Reed, J. Zhang, K. Zolna, J. Clune, N. de Freitas, S. Singh, and T. Rockt¨aschel. Genie: Generative interactive environments.arXiv preprint arX...
-
[25]
PaLM-E: An Embodied Multimodal Language Model
D. Driess, F. Xia, M. S. M. Sajjadi, C. Lynch, A. Chowdhery, B. Ichter, A. Wahid, J. Tompson, Q. Vuong, T. Yu, W. Huang, Y . Chebotar, P. Sermanet, D. Duckworth, S. Levine, V . Vanhoucke, K. Hausman, M. Toussaint, K. Greff, A. Zeng, I. Mordatch, and P. Florence. Palm-e: An embodied multimodal language model. InarXiv preprint arXiv:2303.03378, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[26]
A. Brohan, N. Brown, J. Carbajal, Y . Chebotar, J. Dabis, C. Finn, K. Gopalakrishnan, K. Haus- man, A. Herzog, J. Hsu, J. Ibarz, B. Ichter, A. Irpan, T. Jackson, S. Jesmonth, N. Joshi, R. Ju- lian, D. Kalashnikov, Y . Kuang, I. Leal, K.-H. Lee, S. Levine, Y . Lu, U. Malla, D. Manjunath, I. Mordatch, O. Nachum, C. Parada, J. Peralta, E. Perez, K. Pertsch, ...
-
[27]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Haus- man, B. Ichter, S. Jakubczak, T. Jones, L. Ke, S. Levine, A. Li-Bell, M. Mothukuri, S. Nair, K. Pertsch, L. X. Shi, J. Tanner, Q. Vuong, A. Walling, H. Wang, and U. Zhilinsky.π 0: A vision-language-action flow model for general robot control, 2026. URLhttps://arxiv. o...
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[28]
Language models as zero-shot planners: Extracting actionable knowledge for embodied agents,
W. Huang, P. Abbeel, D. Pathak, and I. Mordatch. Language models as zero-shot planners: Extracting actionable knowledge for embodied agents, 2022. URLhttps://arxiv.org/ abs/2201.07207
-
[29]
A. Byravan, F. Leeb, F. Meier, and D. Fox. Se3-pose-nets: Structured deep dynamics models for visuomotor control. In2018 IEEE International Conference on Robotics and Automation (ICRA), pages 3339–3346, 2018. doi:10.1109/ICRA.2018.8461184
-
[30]
Battaglia, R
P. Battaglia, R. Pascanu, M. Lai, D. Jimenez Rezende, and k. kavukcuoglu. Interaction net- works for learning about objects, relations and physics. In D. Lee, M. Sugiyama, U. Luxburg, I. Guyon, and R. Garnett, editors,Advances in Neural Information Processing Systems, vol- ume 29. Curran Associates, Inc., 2016. URLhttps://proceedings.neurips.cc/paper_ fil...
2016
-
[31]
Battaglia, R
P. Battaglia, R. Pascanu, M. Lai, D. J. Rezende, and K. kavukcuoglu. Interaction networks for learning about objects, relations and physics. InProceedings of the 30th International Conference on Neural Information Processing Systems, NIPS’16, page 4509–4517, Red Hook, NY , USA, 2016. Curran Associates Inc. ISBN 9781510838819
2016
-
[32]
Sanchez-Gonzalez, J
A. Sanchez-Gonzalez, J. Godwin, T. Pfaff, R. Ying, J. Leskovec, and P. Battaglia. Learning to simulate complex physics with graph networks. In H. D. III and A. Singh, editors,Proceedings of the 37th International Conference on Machine Learning, volume 119 ofProceedings of Machine Learning Research, pages 8459–8468. PMLR, 13–18 Jul 2020. URLhttps:// procee...
2020
-
[33]
Raissi, P
M. Raissi, P. Perdikaris, and G. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial dif- ferential equations.Journal of Computational Physics, 378:686–707, 2019. ISSN 0021-
2019
-
[34]
doi:https://doi.org/10.1016/j.jcp.2018.10.045. URLhttps://www.sciencedirect. com/science/article/pii/S0021999118307125
-
[35]
Z. Li, N. B. Kovachki, K. Azizzadenesheli, B. liu, K. Bhattacharya, A. Stuart, and A. Anand- kumar. Fourier neural operator for parametric partial differential equations. InInternational Conference on Learning Representations, 2021. URLhttps://openreview.net/forum? id=c8P9NQVtmnO
2021
-
[36]
Kovachki, Z
N. Kovachki, Z. Li, B. Liu, K. Azizzadenesheli, K. Bhattacharya, A. Stuart, and A. Anand- kumar. Neural operator: learning maps between function spaces with applications to pdes.J. Mach. Learn. Res., 24(1), Jan. 2023. ISSN 1532-4435
2023
- [37]
-
[38]
Abou-Chakra, K
J. Abou-Chakra, K. Rana, F. Dayoub, and N. Suenderhauf. Physically embodied gaussian splatting: A realtime correctable world model for robotics. In8th Annual Conference on Robot Learning, 2024. URLhttps://openreview.net/forum?id=AEq0onGrN2
2024
-
[39]
P. Borycki, W. Smolak-Dy ˙zewska, J. Waczy´nska, M. Mazur, S. Tadeja, and P. Spurek. Gasp: Gaussian splatting for physics-based simulations.Computer Vision and Image Understanding, 265:104699, 2026. ISSN 1077-3142. doi:https://doi.org/10.1016/j.cviu.2026.104699. URL https://www.sciencedirect.com/science/article/pii/S1077314226000664
-
[40]
T. Xie, Z. Zong, Y . Qiu, X. Li, Y . Feng, Y . Yang, and C. Jiang. Physgaussian: Physics- integrated 3d gaussians for generative dynamics. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4389–4398, 2024. 11
2024
-
[41]
W ¨achter and L
A. W ¨achter and L. T. Biegler. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming.Mathematical programming, 106(1):25–57, 2006
2006
-
[42]
M. Macklin. Warp: A High-performance Python Framework for GPU Simulation and Graph- ics, Mar. 2022. URLhttps://github.com/NVIDIA/warp. NVIDIA GPU Technology Con- ference (GTC)
2022
-
[43]
Tordesillas and J
J. Tordesillas and J. P. How. Minvo basis: Finding simplexes with minimum volume enclosing polynomial curves.Computer-Aided Design, 151:103341, 2022
2022
-
[44]
Knapitsch, J
A. Knapitsch, J. Park, Q.-Y . Zhou, and V . Koltun. Tanks and temples: Benchmarking large- scale scene reconstruction.ACM Transactions on Graphics, 36(4), 2017. 12 Figure 5: Digital elevation map (DEM) of the environment. A Additional Experiments A.1 Central Texas Hill Country We evaluate the system on a real outdoor field site, an approximately500×500ft ...
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.