NoContactNoWorries: Estimating Contact through Vision and Proprioception for In-Hand Dexterous Manipulation
Pith reviewed 2026-06-25 23:53 UTC · model grok-4.3
The pith
A robot can infer binary contact states from RGB-D vision and proprioception to enable dexterous in-hand manipulation without tactile sensors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
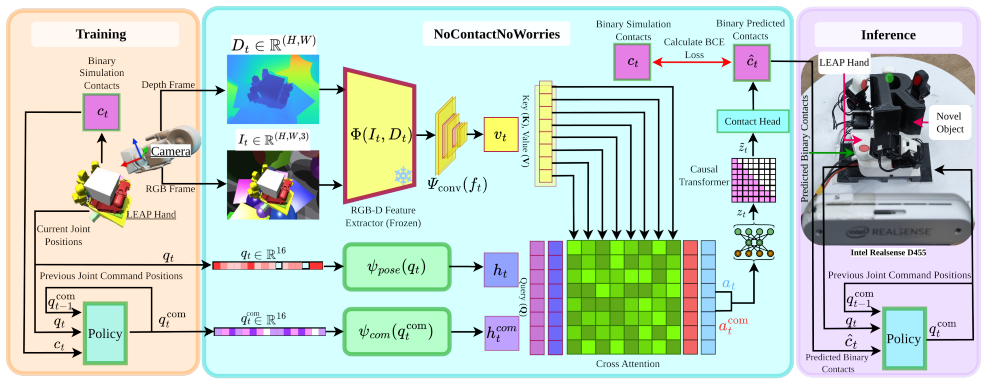
The central claim is that a multimodal transformer fusing RGB-D vision with proprioception can infer binary contact states accurately enough to act as a pseudo-tactile signal, enabling reinforcement learning policies for in-hand object reorientation that generalize to novel objects, with validation through both simulated and physical robot experiments.
What carries the argument
Transformer-based multimodal fusion of RGB-D vision and proprioception to output binary contact predictions as a pseudo-tactile signal.
If this is right
- A single contact prediction model trained on multiple objects enables generalization to novel objects in downstream RL tasks.
- The inferred contact signal directly supports RL agents for in-hand object reorientation without requiring tactile hardware.
- Validation occurs in both simulation and on a physical robot, confirming feasibility for real-world use.
- The method provides a scalable alternative to dedicated tactile sensors specifically for binary contact estimation.
Where Pith is reading between the lines
- This approach could allow existing vision-equipped robots to perform contact-dependent tasks without adding fragile hardware.
- The binary contact signal might serve as a foundation for estimating richer contact properties such as force direction or slip in future extensions.
- Policies trained this way could transfer more readily across different hand morphologies if the vision-proprioception fusion remains robust.
- Integration with other modalities like audio could further improve contact inference in noisy or occluded scenarios.
Load-bearing premise
Binary contact states inferred from RGB-D vision and proprioception are accurate and informative enough to train effective reinforcement learning policies that generalize to novel objects.
What would settle it
An experiment in which an RL policy trained using the inferred contact signal fails to achieve reliable in-hand reorientation on novel objects in the real world, even though the same policy succeeds when given ground-truth contact data.
Figures


read the original abstract
Perceiving physical contact is fundamental to dexterous manipulation. While robots often rely on dedicated hardware tactile sensors, humans exhibit a remarkable ability to infer contact by integrating visual information with an innate sense of their body's pose and movement. Inspired by this embodied perceptual skill, we investigate whether a robot can learn to infer contact from vision, an approach that also offers a scalable alternative to tactile hardware specifically for binary contact estimation, which faces practical challenges in cost, fragility, and integration. We present NoContactNoWorries, a transformer-based multimodal framework that fuses RGB-D vision with the robot's proprioception to infer binary contact states as a pseudo-tactile signal for hand-object interactions. We validate by training a single contact prediction model on multiple objects and show that the inferred contact signal supports downstream reinforcement learning agents for in-hand object reorientation, generalizing to novel objects. Experiments in both simulation and on a real-world robot validate our approach, highlighting the feasibility of inferring contact from vision and proprioception. Project Page: https://soham2560.github.io/no-contact-no-worries/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces NoContactNoWorries, a transformer-based multimodal framework fusing RGB-D vision and robot proprioception to infer binary contact states as a pseudo-tactile signal for in-hand dexterous manipulation. It claims that a single contact prediction model trained on multiple objects enables downstream RL agents to perform in-hand object reorientation, with generalization to novel objects, and validates the approach through experiments in both simulation and on a real-world robot.
Significance. If the empirical results hold with proper quantitative support, the work offers a scalable, hardware-free alternative to tactile sensing for binary contact estimation, which could broaden access to dexterous manipulation research. The single-model training across objects and the downstream RL integration represent potentially useful contributions if substantiated.
major comments (1)
- [Abstract] Abstract: The central claim of validation in simulation and on a real robot, with generalization to novel objects for supporting effective RL policies, is asserted without any reported metrics, training details, baselines, or error analysis. This absence is load-bearing because the soundness of the pseudo-tactile signal for downstream tasks cannot be assessed from the provided text.
Simulated Author's Rebuttal
We thank the referee for their review and for highlighting the need for stronger quantitative support in the abstract. We address the comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim of validation in simulation and on a real robot, with generalization to novel objects for supporting effective RL policies, is asserted without any reported metrics, training details, baselines, or error analysis. This absence is load-bearing because the soundness of the pseudo-tactile signal for downstream tasks cannot be assessed from the provided text.
Authors: We agree that the abstract, as currently written, is a high-level summary and does not include specific quantitative metrics, training details, baselines, or error analysis. The full manuscript provides these details in the experimental sections (contact prediction performance and ablations in simulation, RL policy results with baselines and generalization to novel objects, and real-robot validation). To address the concern and make the central claims more assessable from the abstract alone, we will revise the abstract to include a small number of key quantitative highlights while remaining within length limits. revision: yes
Circularity Check
No significant circularity; empirical ML pipeline is self-contained
full rationale
The paper describes an empirical training procedure for a multimodal transformer that maps RGB-D images and proprioceptive states to binary contact labels, then feeds the resulting pseudo-tactile signal into separate RL policies for reorientation. No equations, derivations, or parameter-fitting steps are presented that would allow any claimed prediction to reduce to its own training inputs by construction. Validation rests on held-out simulation and real-robot experiments across novel objects, which are externally falsifiable and do not rely on self-citation chains or uniqueness theorems. The approach therefore contains no load-bearing circular reductions of the kinds enumerated in the analysis criteria.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard assumptions in deep learning hold for the transformer model trained on contact labels derived from simulation or real data.
Reference graph
Works this paper leans on
-
[1]
A system for general in-hand object re-orientation,
T. Chen, J. Xu, and P. Agrawal, “A system for general in-hand object re-orientation,” inCoRL. PMLR, 2022, pp. 297–307
2022
-
[2]
Anyrotate: Gravity-invariant in- hand object rotation with sim-to-real touch,
M. Yang, A. Church, Y . Lin, C. J. Ford, H. Li, E. Psomopoulou, D. A. Barton, N. F. Leporaet al., “Anyrotate: Gravity-invariant in- hand object rotation with sim-to-real touch,” inCoRL. PMLR, 2025, pp. 4727–4747
2025
-
[3]
Rotating without seeing: Towards in-hand dexterity through touch,
Z.-H. Yin, B. Huang, Y . Qin, Q. Chen, and X. Wang, “Rotating without seeing: Towards in-hand dexterity through touch,”RSS, 2023
2023
-
[4]
Vtdexmanip: A dataset and benchmark for visual-tactile pretraining and dexterous manipulation with reinforcement learning,
Q. Liu, Y . Cui, Z. Sun, G. Li, J. Chen, and Q. Ye, “Vtdexmanip: A dataset and benchmark for visual-tactile pretraining and dexterous manipulation with reinforcement learning,” inThe Thirteenth Interna- tional Conference on Learning Representations, 2025
2025
-
[5]
Making sense of vision and touch: Learning multimodal representations for contact-rich tasks,
M. A. Lee, Y . Zhu, P. Zachares, M. Tan, K. Srinivasan, S. Savarese, L. Fei-Fei, A. Garg, and J. Bohg, “Making sense of vision and touch: Learning multimodal representations for contact-rich tasks,”IEEE TRo, vol. 36, no. 3, pp. 582–596, 2020
2020
-
[6]
Gelsight: High-resolution robot tactile sensors for estimating geometry and force,
W. Yuan, S. Dong, and E. H. Adelson, “Gelsight: High-resolution robot tactile sensors for estimating geometry and force,”Sensors, vol. 17, no. 12, p. 2762, 2017
2017
-
[7]
Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,
M. Lambeta, P.-W. Chou, S. Tian, B. Yang, B. Maloon, V . R. Most, D. Stroud, R. Santos, A. Byagowi, G. Kammereret al., “Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,”IEEE RAL, vol. 5, no. 3, pp. 3838–3845, 2020
2020
-
[8]
Humans integrate visual and haptic information in a statistically optimal fashion,
M. O. Ernst and M. S. Banks, “Humans integrate visual and haptic information in a statistically optimal fashion,”Nature, vol. 415, no. 6870, pp. 429–433, 2002
2002
-
[9]
Functional organization of inferior area 6 in the macaque monkey: Ii. area f5 and the control of distal movements,
G. Rizzolatti, R. Camarda, L. Fogassi, M. Gentilucci, G. Luppino, and M. Matelli, “Functional organization of inferior area 6 in the macaque monkey: Ii. area f5 and the control of distal movements,”Experimental brain research, vol. 71, pp. 491–507, 1988
1988
-
[10]
Neuronal correlates of subjective sensory experience,
V . de Lafuente and R. Romo, “Neuronal correlates of subjective sensory experience,”Nature neuroscience, vol. 8, no. 12, pp. 1698– 1703, 2005
2005
-
[11]
Vividex: Learning vision-based dexterous manipulation from human videos,
Z. Chen, S. Chen, E. Arlaud, I. Laptev, and C. Schmid, “Vividex: Learning vision-based dexterous manipulation from human videos,” in2025 ICRA. IEEE, 2025, pp. 3336–3343
2025
-
[12]
Learning deep visuomotor policies for dexterous hand manipulation,
D. Jain, A. Li, S. Singhal, A. Rajeswaran, V . Kumar, and E. Todorov, “Learning deep visuomotor policies for dexterous hand manipulation,” in2019 ICRA. IEEE, 2019, pp. 3636–3643
2019
-
[13]
Visual dexterity: In-hand reorientation of novel and complex object shapes,
T. Chen, M. Tippur, S. Wu, V . Kumar, E. Adelson, and P. Agrawal, “Visual dexterity: In-hand reorientation of novel and complex object shapes,”Science Robotics, vol. 8, no. 84, p. eadc9244, 2023
2023
-
[14]
Diffusion policy: Visuomotor policy learning via ac- tion diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via ac- tion diffusion,”The International Journal of Robotics Research, p. 02783649241273668, 2023
2023
-
[15]
3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations,
Y . Ze, G. Zhang, K. Zhang, C. Hu, M. Wang, and H. Xu, “3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations,” in2nd Workshop on Dexterous Manipulation: Design, Perception and Control (RSS), 2024
2024
-
[16]
When would vision- proprioception policies fail in robotic manipulation?
J. Lu, W. Xia, Y . Wu, Z. Lu, and D. Hu, “When would vision- proprioception policies fail in robotic manipulation?” inThe F our- teenth International Conference on Learning Representations, 2026. [Online]. Available: https://openreview.net/forum?id=2RIqqNqALN
2026
-
[17]
Learning in-hand translation using tactile skin with shear and normal force sensing,
J. Yin, H. Qi, J. Malik, J. Pikul, M. Yim, and T. Hellebrekers, “Learning in-hand translation using tactile skin with shear and normal force sensing,” in2025 ICRA. IEEE, 2025, pp. 5850–5856
2025
-
[18]
Tactile-driven dexterous in-hand writing via extrinsic contact sensing,
C. Zhao, L. Xie, B. Huang, S. Wang, and D. Ma, “Tactile-driven dexterous in-hand writing via extrinsic contact sensing,”IEEE RAL, 2025
2025
-
[19]
Robot synesthesia: In-hand manipulation with visuotactile sensing,
Y . Yuan, H. Che, Y . Qin, B. Huang, Z.-H. Yin, K.-W. Lee, Y . Wu, S.- C. Lim, and X. Wang, “Robot synesthesia: In-hand manipulation with visuotactile sensing,” in2024 ICRA. IEEE, 2024, pp. 6558–6565
2024
-
[20]
3d-vitac: Learn- ing fine-grained manipulation with visuo-tactile sensing,
B. Huang, Y . Wang, X. Yang, Y . Luo, and Y . Li, “3d-vitac: Learn- ing fine-grained manipulation with visuo-tactile sensing,” inCoRL. PMLR, 2025, pp. 2557–2578
2025
-
[21]
General in-hand object rotation with vision and touch,
H. Qi, B. Yi, S. Suresh, M. Lambeta, Y . Ma, R. Calandra, and J. Malik, “General in-hand object rotation with vision and touch,” inCoRL. PMLR, 2023, pp. 2549–2564
2023
-
[22]
The power of the senses: Generalizable manipulation from vision and touch through masked multimodal learning,
C. Sferrazza, Y . Seo, H. Liu, Y . Lee, and P. Abbeel, “The power of the senses: Generalizable manipulation from vision and touch through masked multimodal learning,” in2024 IROS. IEEE, 2024, pp. 9698– 9705
2024
-
[23]
Masked visual- tactile pre-training for robot manipulation,
Q. Liu, Q. Ye, Z. Sun, Y . Cui, G. Li, and J. Chen, “Masked visual- tactile pre-training for robot manipulation,” in2024 ICRA, 2024, pp. 13 859–13 875
2024
-
[24]
Vitacformer: Learning cross-modal representation for visuo-tactile dexterous manipulation,
L. Heng, H. Geng, K. Zhang, P. Abbeel, and J. Malik, “Vitacformer: Learning cross-modal representation for visuo-tactile dexterous manipulation,” 2025. [Online]. Available: https://arxiv.org/abs/2506. 15953
2025
-
[25]
Visuo-tactile transformers for manipulation,
Y . Chen, M. Van der Merwe, A. Sipos, and N. Fazeli, “Visuo-tactile transformers for manipulation,” inCoRL. PMLR, 2023, pp. 2026– 2040
2023
-
[26]
Interrep: A visual interaction representation for robotic grasping,
Y . Cui, Q. Ye, Q. Liu, A. Chen, G. Li, and J. Chen, “Interrep: A visual interaction representation for robotic grasping,” in2024 ICRA. IEEE, 2024, pp. 6448–6454
2024
-
[27]
Vital pretraining: Visuo-tactile pretraining for tactile and non-tactile ma- nipulation policies,
A. George, S. Gano, P. Katragadda, and A. B. Farimani, “Vital pretraining: Visuo-tactile pretraining for tactile and non-tactile ma- nipulation policies,” in2025 ICRA. IEEE, 2025, pp. 258–264
2025
-
[28]
Vitamin: Learning contact-rich tasks through robot-free visuo-tactile manipulation interface,
F. Liu, C. Li, Y . Qin, A. Shaw, J. Xu, P. Abbeel, and R. Chen, “Vitamin: Learning contact-rich tasks through robot-free visuo-tactile manipulation interface,”arXiv preprint arXiv:2504.06156, 2025
arXiv 2025
-
[29]
Upvital: Unpaired visual-tactile self-supervised representation learning for dex- terous robotic manipulation,
G. Han, Q. Liu, Y . Cui, A. Chen, J. Chen, and Q. Ye, “Upvital: Unpaired visual-tactile self-supervised representation learning for dex- terous robotic manipulation,” in2025 ICRA, 2025, pp. 11 838–11 844
2025
-
[30]
Policy invariance under reward transformations: Theory and application to reward shaping
A. Ng, “Policy invariance under reward transformations: Theory and application to reward shaping.” inProceedings of the 16th ICML, 1999, p. 278
1999
-
[31]
Asymformer: Asym- metrical cross-modal representation learning for mobile platform real- time rgb-d semantic segmentation,
S. Du, W. Wang, R. Guo, R. Wang, and S. Tang, “Asymformer: Asym- metrical cross-modal representation learning for mobile platform real- time rgb-d semantic segmentation,” in2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2024, pp. 7608–7615
2024
-
[32]
Leap hand: Low-cost, effi- cient, and anthropomorphic hand for robot learning,
K. Shaw, A. Agarwal, and D. Pathak, “Leap hand: Low-cost, effi- cient, and anthropomorphic hand for robot learning,”arXiv preprint arXiv:2309.06440, 2023
arXiv 2023
-
[33]
Earl: Eye-on-hand reinforcement learner for dynamic grasping with active pose estimation,
B. Huang, J. Yu, and S. Jain, “Earl: Eye-on-hand reinforcement learner for dynamic grasping with active pose estimation,” in2023 IROS. IEEE, 2023, pp. 2963–2970
2023
-
[34]
Learning dexterous in-hand manipulation with multifingered hands via visuomotor diffusion,
P. Koczy, M. C. Welle, and D. Kragic, “Learning dexterous in-hand manipulation with multifingered hands via visuomotor diffusion,” in 2025 IROS. IEEE, 2025, pp. 121–127
2025
-
[35]
In-hand object rotation via rapid motor adaptation,
H. Qi, A. Kumar, R. Calandra, Y . Ma, and J. Malik, “In-hand object rotation via rapid motor adaptation,” inCoRL. PMLR, 2023, pp. 1722–1732
2023
-
[36]
Transforce: Transferable force prediction for vision-based tactile sensors with sequential image translation,
Z. Chen, N. Ou, X. Zhang, and S. Luo, “Transforce: Transferable force prediction for vision-based tactile sensors with sequential image translation,” in2025 ICRA. IEEE, 2025, pp. 237–243
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.