FT-WBC: Learning Fault-Tolerant Whole-Body Control for Legged Loco-Manipulation
Pith reviewed 2026-06-30 10:13 UTC · model grok-4.3
The pith
FT-WBC predicts actuator faults from lower-body history and adapts base posture to keep legged manipulators stable and functional.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
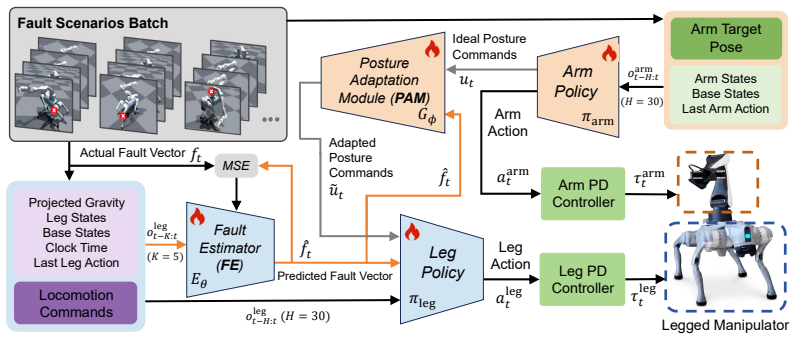
FT-WBC adopts a decoupled upper- and lower-body policy architecture and introduces a Fault Estimator that predicts faulty joints from lower-body proprioceptive histories together with a Posture Adaptation Module that converts potentially unstable posture requests into safe base commands, allowing synthesis of compensatory gaits that preserve arm workspace while maintaining whole-body stability under actuator failures.
What carries the argument
The fault-aware posture adaptation mechanism formed by the Fault Estimator (FE) and Posture Adaptation Module (PAM), which modifies base posture plans using predicted faults to produce executable lower-body commands.
If this is right
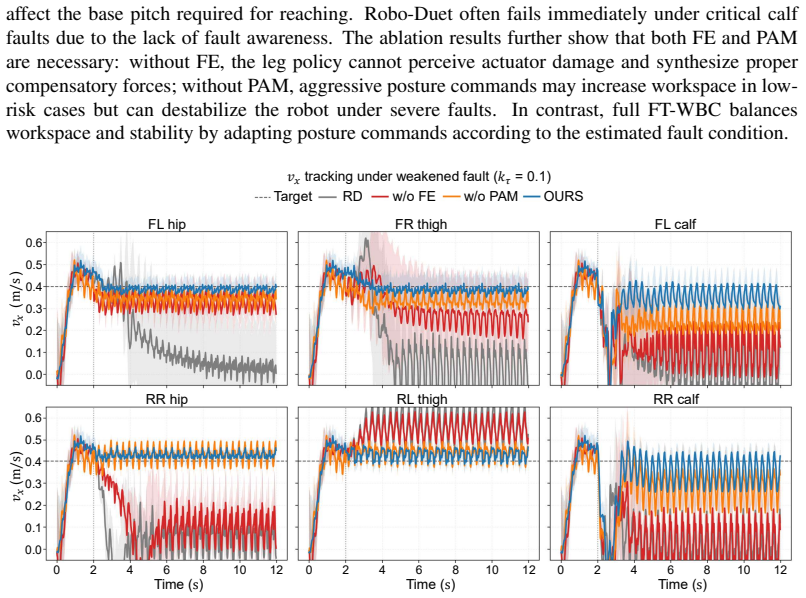
- Survival rate under actuator weakening or locking failures increases substantially compared with non-adaptive controllers.
- Arm workspace is retained to the greatest extent possible while whole-body stability is preserved.
- The learned policy transfers zero-shot from simulation to a physical legged manipulator.
- Compensatory gaits are generated on the fly without requiring changes to the lower-body locomotion policy.
Where Pith is reading between the lines
- The separation of fault estimation from the locomotion policy could allow the same estimator to be reused across different lower-body controllers.
- If the estimator works from leg data alone, similar modules might be added to other robots that combine mobility with manipulation without adding arm sensors.
- The approach opens the possibility of trading hardware redundancy for software adaptation in safety-critical deployments.
Load-bearing premise
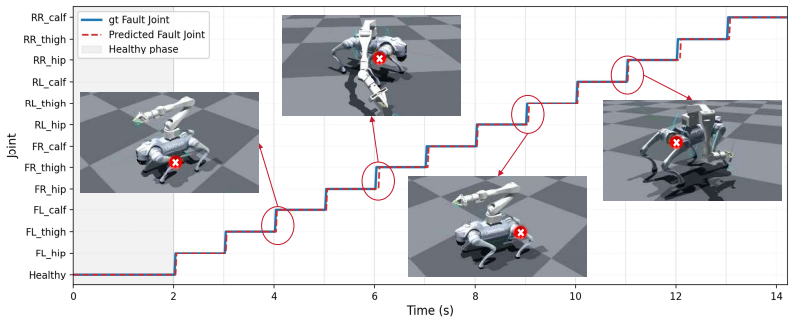
The fault estimator can reliably identify which joints have failed using only lower-body proprioceptive history so that the posture module can generate commands the lower-body policy can execute while staying stable.
What would settle it
A controlled experiment in which the fault estimator is deliberately given incorrect failure labels and the robot is observed to fall or lose workspace at rates no better than a non-adaptive baseline controller.
Figures
read the original abstract
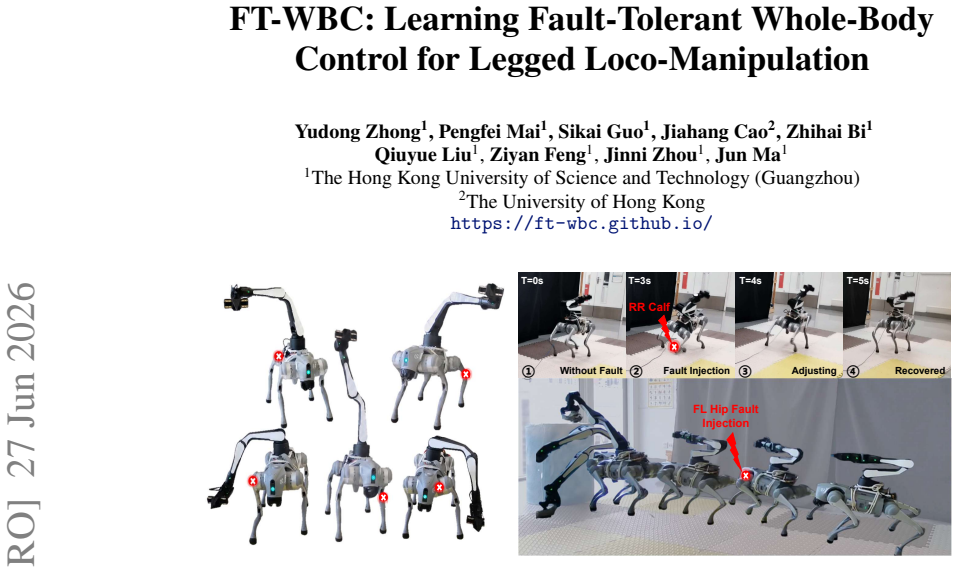
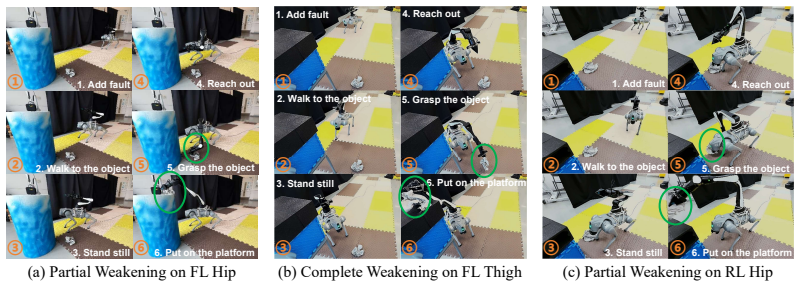
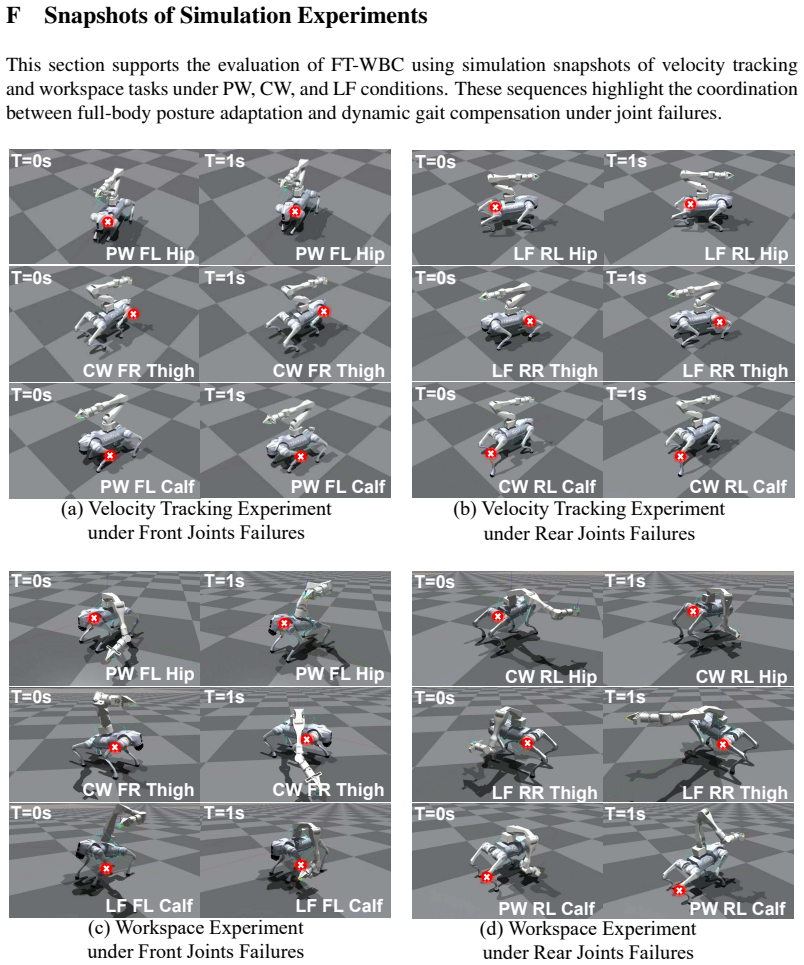
Legged manipulators combine the mobility of legged platforms with the manipulation capability of robotic arms. However, arm-induced Center-of-Mass shifts and dynamic disturbances make the system more prone to instability under actuator failures, potentially leading to falls, task failures, or safety risks. Existing fault-tolerant control methods mainly focus on locomotion alone, leaving the coupled problem of whole-body stability and arm reachability in fault-tolerant loco-manipulation largely unaddressed. To bridge this gap, we propose FT-WBC, a fault-tolerant loco-manipulation framework for robust whole-body control of legged manipulators under actuator failures. FT-WBC adopts a decoupled upper- and lower-body policy architecture and introduces two key modules: a Fault Estimator (FE) and a Posture Adaptation Module (PAM). The FE predicts faulty joints from lower-body proprioceptive histories, while the PAM uses this fault information to adapt the base posture plan generated by the arm policy, converting potentially unstable posture requests into safe and executable base posture commands. Through this fault-aware posture adaptation mechanism, FT-WBC synthesizes compensatory gaits under actuator failures and preserves as much arm workspace as possible while maintaining whole-body stability. Simulation and real-world experiments show that FT-WBC significantly improves survival rate and workspace under weakening or locked failures, and transfers zero-shot to a real legged manipulator in the real world.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes FT-WBC, a learning-based fault-tolerant whole-body control framework for legged manipulators. It uses a decoupled upper- and lower-body policy architecture together with a Fault Estimator (FE) that predicts faulty joints from lower-body proprioceptive histories and a Posture Adaptation Module (PAM) that converts arm-policy posture requests into safe base commands. The central claim is that this fault-aware adaptation enables compensatory gaits under actuator failures while preserving arm workspace and whole-body stability, supported by simulation and real-world experiments showing improved survival rate and workspace.
Significance. If the empirical claims hold and the FE/PAM mechanism is shown to function as described, the work addresses a practically important gap between existing fault-tolerant locomotion methods and coupled loco-manipulation under failure. The decoupled architecture and zero-shot real-world transfer would be notable strengths for the field.
major comments (2)
- [Abstract] Abstract: the statement that 'simulation and real-world experiments show that FT-WBC significantly improves survival rate and workspace' supplies no quantitative values, baselines, failure-mode definitions, trial counts, or statistical details. Because the central claim rests on these uninspectable results, the magnitude and reliability of the improvement cannot be assessed.
- [Method (Fault Estimator)] Method section describing the Fault Estimator: the FE is asserted to predict faulty joints (including arm actuators) solely from lower-body proprioceptive history. Arm actuator failures produce no direct change in lower-body joint positions, velocities, or torques beyond secondary effects already handled by the locomotion policy. No explicit cross-body correlation mechanism, arm-state reconstruction, or learned mapping is described that would allow reliable detection of arm faults; without such a mechanism the subsequent PAM adaptation for arm failures lacks a sound basis and directly affects the 'preserves as much arm workspace' claim.
minor comments (1)
- [Abstract] The abstract is unusually long and contains the main empirical claims; moving quantitative results and failure definitions to a dedicated experiments paragraph would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our results and the technical details of the Fault Estimator. We address each major comment below and will incorporate revisions to improve transparency and completeness.
read point-by-point responses
-
Referee: [Abstract] Abstract: the statement that 'simulation and real-world experiments show that FT-WBC significantly improves survival rate and workspace' supplies no quantitative values, baselines, failure-mode definitions, trial counts, or statistical details. Because the central claim rests on these uninspectable results, the magnitude and reliability of the improvement cannot be assessed.
Authors: We agree that the abstract would be strengthened by including quantitative details. In the revised manuscript we will expand the abstract to report specific metrics (e.g., survival-rate improvements under weakening and locked failures, workspace preservation percentages, number of trials, baseline comparisons, and failure-mode definitions) drawn from the simulation and real-world sections. This change will make the central empirical claims directly assessable without altering the reported results. revision: yes
-
Referee: [Method (Fault Estimator)] Method section describing the Fault Estimator: the FE is asserted to predict faulty joints (including arm actuators) solely from lower-body proprioceptive history. Arm actuator failures produce no direct change in lower-body joint positions, velocities, or torques beyond secondary effects already handled by the locomotion policy. No explicit cross-body correlation mechanism, arm-state reconstruction, or learned mapping is described that would allow reliable detection of arm faults; without such a mechanism the subsequent PAM adaptation for arm failures lacks a sound basis and directly affects the 'preserves as much arm workspace' claim.
Authors: The Fault Estimator is a learned neural network trained on proprioceptive histories collected under both lower-body and arm actuator failures. Although arm failures lack direct lower-body signatures, they produce observable secondary effects on base dynamics, CoM shifts, and posture stability that are captured in the lower-body state history; the network learns the resulting cross-body mapping during training. We will revise the method section to explicitly describe the training data composition, network architecture, loss function, and how these indirect correlations are learned, thereby providing the mechanistic basis for arm-fault detection and the subsequent PAM adaptation. revision: yes
Circularity Check
No circularity; learned architecture with no self-referential derivation
full rationale
The paper describes a decoupled policy architecture (Fault Estimator predicting from lower-body histories, Posture Adaptation Module adapting base posture) trained via reinforcement learning. No equations, fitted parameters, or derivation chain are presented that reduce any claimed output to the inputs by construction. Claims rest on empirical survival rates and workspace metrics in simulation and real-world transfer, which are externally falsifiable and independent of any self-definition or self-citation load-bearing step. The method is architectural rather than a mathematical derivation, so no load-bearing step reduces to its own inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
- [1]
-
[2]
X. Liu, B. Ma, C. Qi, Y . Ding, N. Xu, G. Zhang, P. Chen, K. Liu, Z. Jia, C. Guan, et al. Mlm: Learning multi-task loco-manipulation whole-body control for quadruped robot with arm.IEEE Robotics and Automation Letters, 11(1):81–88, 2025
2025
- [3]
-
[4]
Y . Fu, Y . Zhang, Q. Yang, L. Yan, Z. Cao, and Y . Gao. Contrastive forward prediction rein- forcement learning for adaptive fault-tolerant legged robots. InConference on Robot Learning, pages 3285–3303. PMLR, 2025
2025
- [5]
-
[6]
S. Lee, I. M. A. Nahrendra, D. Lee, B. Yu, M. Oh, H. Lee, and H. Myung. Dreamflex: Learn- ing fault-aware quadrupedal locomotion controller for anomaly situation in rough terrains. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 16001– 16007. IEEE, 2025
2025
-
[7]
Z. Fu, X. Cheng, and D. Pathak. Deep whole-body control: learning a unified policy for manipulation and locomotion. InConference on Robot Learning, pages 138–149. PMLR, 2023
2023
-
[8]
G. Pan, Q. Ben, Z. Yuan, G. Jiang, Y . Ji, S. Li, J. Pang, H. Liu, and H. Xu. Roboduet: Learning a cooperative policy for whole-body legged loco-manipulation.IEEE Robotics and Automation Letters, 2025
2025
- [9]
-
[10]
Portela, G
T. Portela, G. B. Margolis, Y . Ji, and P. Agrawal. Learning force control for legged manip- ulation. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 15366–15372. IEEE, 2024
2024
-
[11]
Q. Li, Q. Meng, Y . Qin, J. Chen, X. Ding, and K. Xu. Dynamic interaction control in legged mobile manipulators: A decoupled approach. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 1406–1412. IEEE, 2024
2024
-
[12]
A. Rigo, M. Hu, S. K. Gupta, and Q. Nguyen. Hierarchical optimization-based control for whole-body loco-manipulation of heavy objects. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 15322–15328. IEEE, 2024
2024
- [13]
- [14]
-
[15]
Huang, A
H. Huang, A. Loquercio, A. Kumar, N. Thakkar, K. Goldberg, and J. Malik. Manipulator as a tail: Promoting dynamic stability for legged locomotion. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 9712–9719. IEEE, 2024
2024
- [16]
-
[17]
Zhang, N
J. Zhang, N. Gireesh, J. Wang, X. Fang, C. Xu, W. Chen, L. Dai, and H. Wang. Gamma: Graspability-aware mobile manipulation policy learning based on online grasping pose fusion. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 1399–
-
[18]
Bimanual robot-assisted dressing: A spherical coordinate-based strategy for tight-fitting garments
A. Jaafar, S. S. Raman, S. Harithas, Y . Wei, S. Juliani, A. Wernerfelt, B. Quartey, I. Idrees, J. X. Liu, and S. Tellex.λ: A benchmark for data-efficiency in long-horizon indoor mobile manipulation robotics. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 8942–8949, 2025. doi:10.1109/IROS60139.2025.11246789
-
[19]
R. Mendonca, E. Panov, B. Bucher, J. Wang, and D. Pathak. Continuously improving mobile manipulation with autonomous real-world rl.arXiv preprint arXiv:2409.20568, 2024
-
[20]
S. Xie, C. Hu, D. Wang, J. Johnson, M. Bagavathiannan, and D. Song. Coupled active percep- tion and manipulation planning for a mobile manipulator in precision agriculture applications. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 12665– 12671. IEEE, 2024
2024
-
[21]
K. Liu, Z. Wang, B. Li, L. Zhu, and H. Ding. Fault joint detection and adaptive fault-tolerant control of legged robots under joint partial failures.IEEE Robotics and Automation Letters, 2025
2025
-
[22]
Z. Luo, E. Xiao, and P. Lu. Ft-net: Learning failure recovery and fault-tolerant locomotion for quadruped robots.IEEE Robotics and Automation Letters, 8(12):8414–8421, 2023
2023
-
[23]
F. Yang, C. Yang, D. Guo, H. Liu, and F. Sun. Fault-aware robust control via adversarial reinforcement learning. In2021 IEEE 11th Annual International Conference on CYBER Tech- nology in Automation, Control, and Intelligent Systems (CYBER), pages 109–115. IEEE, 2021
2021
- [24]
-
[25]
W. Okamoto, H. Kera, and K. Kawamoto. Reinforcement learning with adaptive curriculum dynamics randomization for fault-tolerant robot control.arXiv preprint arXiv:2111.10005, 2021
-
[26]
X. Wu, W. Dong, H. Lai, Y . Yu, and Y . Wen. Adaptive control strategy for quadruped robots in actuator degradation scenarios. InProceedings of the Fifth International Conference on Distributed Artificial Intelligence, pages 1–13, 2023
2023
-
[27]
Zhang, Z
P. Zhang, Z. Hua, Q. Qiu, and J. Ding. Ft-cpg: Learning central pattern generators for fault- tolerant quadruped locomotion under multi-joint failures.IEEE Robotics and Automation Let- ters, 2025
2025
-
[28]
M. Kim, U. Shin, and J.-Y . Kim. Learning quadrupedal locomotion with impaired joints using random joint masking. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 9751–9757. IEEE, 2024
2024
- [29]
-
[30]
C. Chen, C. Li, H. Lu, Y . Wang, and R. Xiong. Meta reinforcement learning of locomotion policy for quadruped robots with motor stuck.IEEE Transactions on Automation Science and Engineering, 22:5551–5565, 2024
2024
-
[31]
T. Hou, J. Tu, X. Gao, Z. Dong, P. Zhai, and L. Zhang. Multi-task learning of active fault- tolerant controller for leg failures in quadruped robots. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 9758–9764. IEEE, 2024. 11 Appendix A Leg Policy and Arm Policy A.1 Policy Inputs and Actions FT-WBC adopts a decoupled upper- and...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.