Dense Force Estimation with an Event-based Optical Tactile Sensor
Pith reviewed 2026-06-27 16:10 UTC · model grok-4.3
The pith
Event-based optical tactile sensors reconstruct dense 3D force fields at 100 Hz by recovering displacements then applying inverse finite elements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
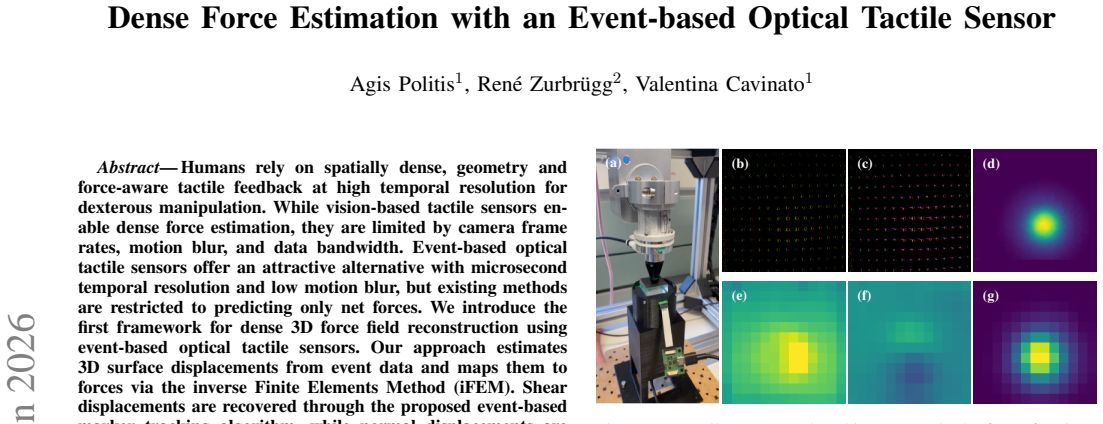
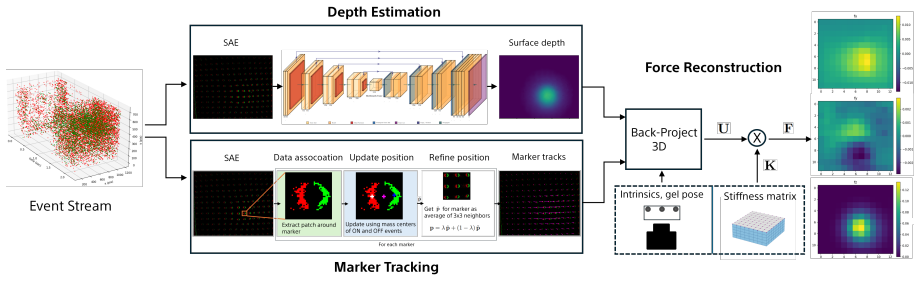
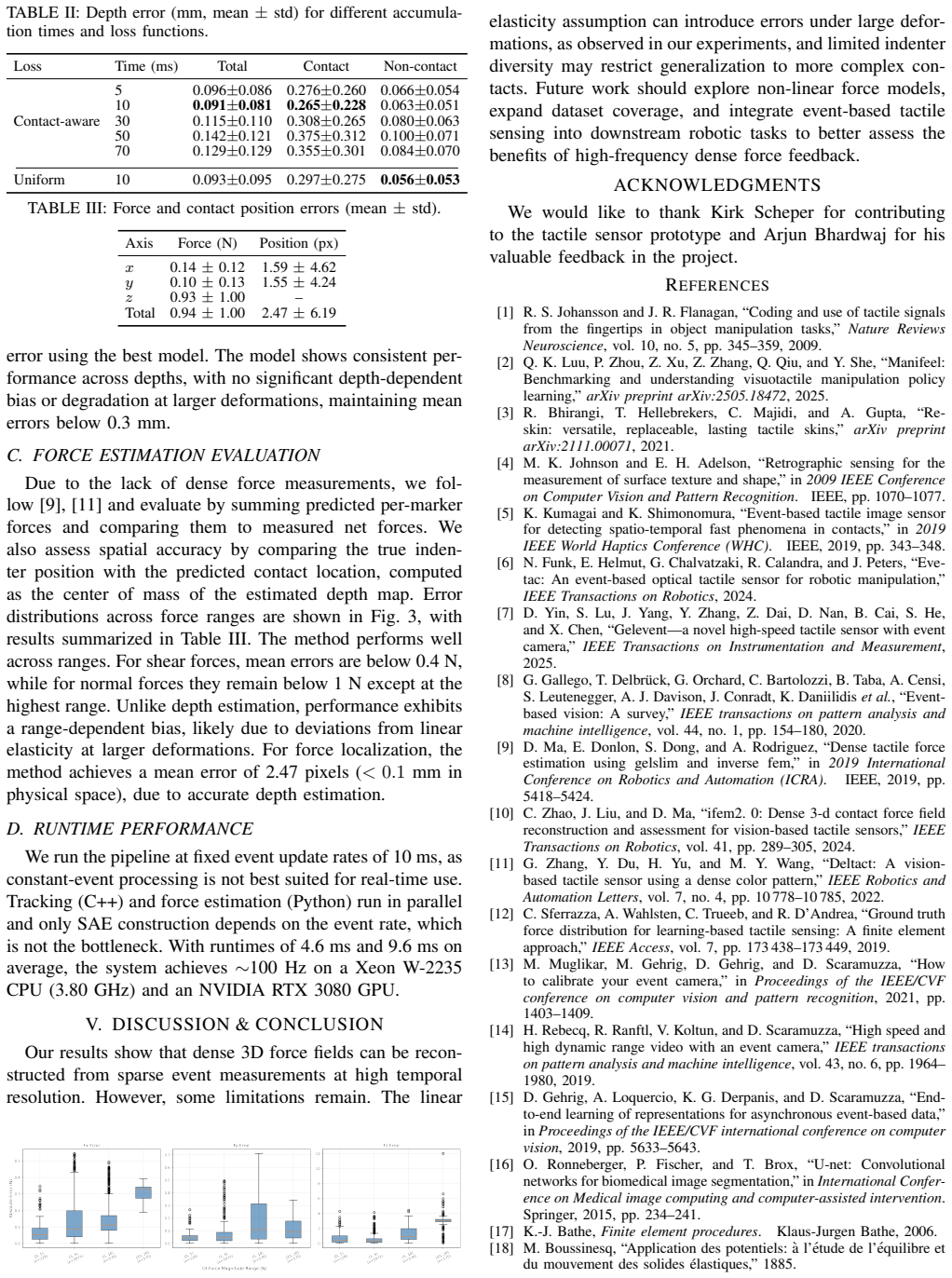
We introduce the first framework for dense 3D force field reconstruction using event-based optical tactile sensors. Our approach estimates 3D surface displacements from event data and maps them to forces via the inverse Finite Elements Method (iFEM). Shear displacements are recovered through the proposed event-based marker tracking algorithm, while normal displacements are predicted by a convolutional neural network trained on a collected dataset of synchronized force-displacement-event data. Experiments demonstrate accurate reconstruction of physically grounded forces, achieving a mean absolute error of (0.14 N, 0.10 N, 0.93 N) over force ranges up to (4 N, 4 N, 20 N), while operating at an
What carries the argument
Event-based marker tracking for shear displacements, a CNN for normal displacements, and the inverse Finite Element Method (iFEM) that converts the resulting 3D surface displacements into force fields.
If this is right
- The system produces dense 3D force estimates at an average rate of 100 Hz.
- Reconstructed forces remain physically grounded via the inverse finite element conversion.
- Reported accuracy holds across force ranges up to 4 N in each shear direction and 20 N normal.
- The pipeline supports high-frequency closed-loop control in robotic grasping and dexterous tasks.
Where Pith is reading between the lines
- Combining this sensor with existing robot controllers could close the loop at rates that prevent slip on delicate objects.
- The marker-tracking plus CNN split suggests that future work could replace the CNN with a purely event-driven network to remove any frame-rate dependency.
- Extending the synchronized dataset to include varied surface textures would test whether the current generalization claim holds under larger domain shifts.
Load-bearing premise
The inverse finite element method converts recovered displacements into accurate forces and the neural network trained on the collected dataset generalizes without large errors to new contact conditions.
What would settle it
Apply the sensor to a contact geometry or material absent from the training set, measure ground-truth forces independently, and check whether the predicted dense force field deviates beyond the reported error bounds.
Figures
read the original abstract
Humans rely on spatially dense, geometry and force-aware tactile feedback at high temporal resolution for dexterous manipulation. While vision-based tactile sensors enable dense force estimation, they are limited by camera frame rates, motion blur, and data bandwidth. Event-based optical tactile sensors offer an attractive alternative with microsecond temporal resolution and low motion blur, but existing methods are restricted to predicting only net forces. We introduce the first framework for dense 3D force field reconstruction using event-based optical tactile sensors. Our approach estimates 3D surface displacements from event data and maps them to forces via the inverse Finite Elements Method (iFEM). Shear displacements are recovered through the proposed event-based marker tracking algorithm, while normal displacements are predicted by a convolutional neural network trained on a collected dataset of synchronized force-displacement-event data. Experiments demonstrate accurate reconstruction of physically grounded forces, achieving a mean absolute error of (0.14 N, 0.10 N, 0.93 N) over force ranges up to (4 N, 4 N, 20 N), while operating at an average of 100 Hz. This work constitutes a first step toward enabling dense force feedback for high-frequency control in robotic grasping and dexterous manipulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the first framework for reconstructing dense 3D force fields using event-based optical tactile sensors. The method estimates 3D surface displacements from event streams—using a proposed event-based marker tracking algorithm for shear components and a CNN for normal components—and then applies the inverse Finite Element Method (iFEM) to obtain the corresponding force fields. Quantitative results are provided showing mean absolute errors of 0.14 N, 0.10 N, and 0.93 N for the three force components over ranges up to 4 N, 4 N, and 20 N, with an average operating frequency of 100 Hz.
Significance. Should the claims hold after addressing the validation concerns, this work would be significant for advancing high-frequency tactile sensing in robotics. It addresses key limitations of traditional vision-based tactile sensors by utilizing event cameras' advantages in temporal resolution and low data bandwidth. The use of iFEM to ensure physical grounding of the forces is a notable methodological choice that could support applications in dexterous manipulation and grasping.
major comments (2)
- [Experiments] Experiments section: The reported MAE values lack details on the size of the synchronized force-displacement-event dataset, the train/validation/test splits used for CNN training, error bars, or any cross-validation procedure. Without these, the central performance claims cannot be fully assessed for reliability or generalization beyond the authors' collection conditions.
- [iFEM force reconstruction (Section 3)] iFEM force reconstruction (Section 3): The pipeline's claim of physically grounded 3D forces depends on the forward FE model's accuracy (linear elasticity, material parameters, boundary conditions). No sensitivity analysis or independent validation against a reference sensor under large-deformation or varied contact geometries is provided, so systematic bias from model mismatch (e.g., unmodeled hyperelasticity for normal forces up to 20 N) is not ruled out.
minor comments (1)
- [Abstract] Abstract: The ordering of the force ranges (4 N, 4 N, 20 N) and corresponding MAE components is not explicitly mapped to (Fx, Fy, Fz); adding this clarification would improve precision.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the positive assessment of the work's potential significance. We address each major comment below and indicate the revisions planned for the manuscript.
read point-by-point responses
-
Referee: [Experiments] Experiments section: The reported MAE values lack details on the size of the synchronized force-displacement-event dataset, the train/validation/test splits used for CNN training, error bars, or any cross-validation procedure. Without these, the central performance claims cannot be fully assessed for reliability or generalization beyond the authors' collection conditions.
Authors: We agree that these details are required to properly evaluate the reported performance. In the revised manuscript we will expand the Experiments section to specify the total size of the synchronized force-displacement-event dataset, the exact train/validation/test splits used for CNN training, error bars computed across repeated trials, and the cross-validation procedure that was followed. revision: yes
-
Referee: [iFEM force reconstruction (Section 3)] iFEM force reconstruction (Section 3): The pipeline's claim of physically grounded 3D forces depends on the forward FE model's accuracy (linear elasticity, material parameters, boundary conditions). No sensitivity analysis or independent validation against a reference sensor under large-deformation or varied contact geometries is provided, so systematic bias from model mismatch (e.g., unmodeled hyperelasticity for normal forces up to 20 N) is not ruled out.
Authors: The forward model employs linear elasticity with material parameters obtained from independent characterization of the elastomer. We acknowledge that an explicit sensitivity study is absent. In the revision we will add a dedicated subsection presenting a sensitivity analysis with respect to material parameters and boundary conditions, together with a discussion of the linear-elasticity assumption within the tested force ranges. A full independent validation campaign under large deformations and varied geometries would require new experiments and is therefore noted as future work. revision: partial
Circularity Check
No significant circularity; pipeline combines data-driven estimation with standard iFEM inversion
full rationale
The paper describes a pipeline that recovers shear displacements via an event-based marker tracking algorithm, predicts normal displacements with a CNN trained on the authors' synchronized force-displacement-event dataset, and then applies the inverse Finite Element Method (iFEM) to obtain 3D forces. The reported MAE values are presented as experimental performance metrics on the collected data ranges. No equation or step in the abstract reduces a claimed prediction or result to a fitted parameter by construction, nor does any load-bearing premise rely on a self-citation chain or imported uniqueness theorem. The iFEM step is invoked as an established method for converting displacements to forces rather than being redefined within the paper. The derivation chain therefore remains self-contained and does not exhibit the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- CNN weights
axioms (1)
- domain assumption The inverse finite element model of the sensor elastomer correctly maps surface displacements to contact forces under the operating conditions tested.
Reference graph
Works this paper leans on
-
[1]
Coding and use of tactile signals from the fingertips in object manipulation tasks,
R. S. Johansson and J. R. Flanagan, “Coding and use of tactile signals from the fingertips in object manipulation tasks,”Nature Reviews Neuroscience, vol. 10, no. 5, pp. 345–359, 2009
2009
-
[2]
Manifeel: Benchmarking and understanding visuotactile manipulation policy learning,
Q. K. Luu, P. Zhou, Z. Xu, Z. Zhang, Q. Qiu, and Y . She, “Manifeel: Benchmarking and understanding visuotactile manipulation policy learning,”arXiv preprint arXiv:2505.18472, 2025
arXiv 2025
-
[3]
Re- skin: versatile, replaceable, lasting tactile skins,
R. Bhirangi, T. Hellebrekers, C. Majidi, and A. Gupta, “Re- skin: versatile, replaceable, lasting tactile skins,”arXiv preprint arXiv:2111.00071, 2021
arXiv 2021
-
[4]
Retrographic sensing for the measurement of surface texture and shape,
M. K. Johnson and E. H. Adelson, “Retrographic sensing for the measurement of surface texture and shape,” in2009 IEEE Conference on Computer Vision and Pattern Recognition. IEEE, pp. 1070–1077
-
[5]
Event-based tactile image sensor for detecting spatio-temporal fast phenomena in contacts,
K. Kumagai and K. Shimonomura, “Event-based tactile image sensor for detecting spatio-temporal fast phenomena in contacts,” in2019 IEEE World Haptics Conference (WHC). IEEE, 2019, pp. 343–348
2019
-
[6]
Eve- tac: An event-based optical tactile sensor for robotic manipulation,
N. Funk, E. Helmut, G. Chalvatzaki, R. Calandra, and J. Peters, “Eve- tac: An event-based optical tactile sensor for robotic manipulation,” IEEE Transactions on Robotics, 2024
2024
-
[7]
Gelevent—a novel high-speed tactile sensor with event camera,
D. Yin, S. Lu, J. Yang, Y . Zhang, Z. Dai, D. Nan, B. Cai, S. He, and X. Chen, “Gelevent—a novel high-speed tactile sensor with event camera,”IEEE Transactions on Instrumentation and Measurement, 2025
2025
-
[8]
Event- based vision: A survey,
G. Gallego, T. Delbr ¨uck, G. Orchard, C. Bartolozzi, B. Taba, A. Censi, S. Leutenegger, A. J. Davison, J. Conradt, K. Daniilidiset al., “Event- based vision: A survey,”IEEE transactions on pattern analysis and machine intelligence, vol. 44, no. 1, pp. 154–180, 2020
2020
-
[9]
Dense tactile force estimation using gelslim and inverse fem,
D. Ma, E. Donlon, S. Dong, and A. Rodriguez, “Dense tactile force estimation using gelslim and inverse fem,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 5418–5424
2019
-
[10]
ifem2. 0: Dense 3-d contact force field reconstruction and assessment for vision-based tactile sensors,
C. Zhao, J. Liu, and D. Ma, “ifem2. 0: Dense 3-d contact force field reconstruction and assessment for vision-based tactile sensors,”IEEE Transactions on Robotics, vol. 41, pp. 289–305, 2024
2024
-
[11]
Deltact: A vision- based tactile sensor using a dense color pattern,
G. Zhang, Y . Du, H. Yu, and M. Y . Wang, “Deltact: A vision- based tactile sensor using a dense color pattern,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 778–10 785, 2022
2022
-
[12]
Ground truth force distribution for learning-based tactile sensing: A finite element approach,
C. Sferrazza, A. Wahlsten, C. Trueeb, and R. D’Andrea, “Ground truth force distribution for learning-based tactile sensing: A finite element approach,”IEEE Access, vol. 7, pp. 173 438–173 449, 2019
2019
-
[13]
How to calibrate your event camera,
M. Muglikar, M. Gehrig, D. Gehrig, and D. Scaramuzza, “How to calibrate your event camera,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2021, pp. 1403–1409
2021
-
[14]
High speed and high dynamic range video with an event camera,
H. Rebecq, R. Ranftl, V . Koltun, and D. Scaramuzza, “High speed and high dynamic range video with an event camera,”IEEE transactions on pattern analysis and machine intelligence, vol. 43, no. 6, pp. 1964– 1980, 2019
1964
-
[15]
End- to-end learning of representations for asynchronous event-based data,
D. Gehrig, A. Loquercio, K. G. Derpanis, and D. Scaramuzza, “End- to-end learning of representations for asynchronous event-based data,” inProceedings of the IEEE/CVF international conference on computer vision, 2019, pp. 5633–5643
2019
-
[16]
U-net: Convolutional networks for biomedical image segmentation,
O. Ronneberger, P. Fischer, and T. Brox, “U-net: Convolutional networks for biomedical image segmentation,” inInternational Confer- ence on Medical image computing and computer-assisted intervention. Springer, 2015, pp. 234–241
2015
-
[17]
Bathe,Finite element procedures
K.-J. Bathe,Finite element procedures. Klaus-Jurgen Bathe, 2006
2006
-
[18]
Application des potentiels: `a l’´etude de l’´equilibre et du mouvement des solides ´elastiques,
M. Boussinesq, “Application des potentiels: `a l’´etude de l’´equilibre et du mouvement des solides ´elastiques,” 1885
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.