Analytical Study on the Exposedness of Potential Positions for External Human-Machine Interfaces
Pith reviewed 2026-05-19 04:44 UTC · model grok-4.3
The pith
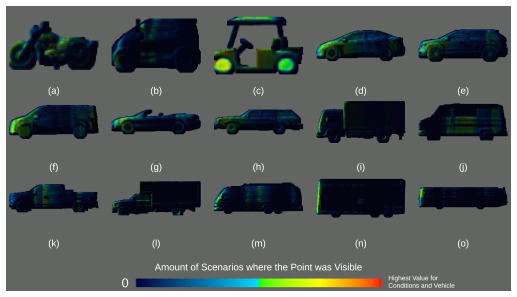
Simulation of pedestrian viewpoints shows wheels, front fenders and headlights are the most visible vehicle surfaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The analysis of simulated viewpoints concludes that the areas of the vehicle most often seen by pedestrians on the sidewalk attempting to cross the road were the wheels, front fenders, and headlights. Based on these results, the paper suggests implementing displays on at least two of the following regions: windshield, front fenders, side mirrors. These findings aim to help ensure that pedestrians are able to see signaling on approaching autonomous vehicles.
What carries the argument
Unity-based simulation that records visibility frequency of vehicle surfaces by positioning virtual cameras at multiple sidewalk locations with varying distances and directions.
If this is right
- Designers should consider placing external human-machine interfaces on high-visibility areas like the front fenders and headlights.
- Using at least two display regions increases the likelihood that pedestrians notice the signals.
- The simulation method can be applied to test visibility in additional traffic or environmental conditions.
- Vehicle manufacturers may use these exposure rankings to standardize interface placements.
Where Pith is reading between the lines
- Real-world validation of the simulation results could lead to regulatory guidelines for display placement on autonomous vehicles.
- Extending the model to include cyclist or driver viewpoints might reveal different optimal positions.
- The emphasis on visible surfaces could influence how other road users like cyclists or drivers are signaled to in mixed traffic.
Load-bearing premise
The simulation's camera placements, distances, and traffic setups accurately reflect the typical viewpoints of real pedestrians observing vehicles from the sidewalk.
What would settle it
Conducting an experiment where real pedestrians wear eye-tracking devices while watching approaching vehicles in actual traffic and comparing the observed gaze points to the simulation's visibility counts.
Figures









read the original abstract
As we move towards a future of autonomous vehicles, questions regarding their method of communication have arisen. One of the common questions concerns the placement of the signaling used to communicate with pedestrians and road users, but few works have been fully dedicated to the matter. This paper uses a simulation made in the Unity game engine to record the fifteen different vehicles under fifty-seven different scenarios each for the first time, in order to find how often its forward-facing exterior surfaces can be seen by a pedestrian on the sidewalk. Variables include the vehicle type, position, number of vehicles on the road, camera position and direction, as well as its minimum and maximum distance from the recorded points. It was concluded that the areas of the vehicle most often seen by pedestrians on the sidewalk attempting to cross the road were the wheels, front fenders, and headlights. Based on these results, a suggestion is made to implement displays on at least two of the following regions: windshield, front fenders, side mirrors. These findings are valuable in the future design of signaling for autonomous vehicles in order to ensure pedestrians are able to see them on approaching vehicles. The software used provides a platform for similar works in the future to be conducted.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper describes a Unity-based simulation study of 15 vehicles across 57 scenarios each to quantify the frequency with which forward-facing exterior surfaces are visible to a virtual pedestrian camera positioned on the sidewalk. It concludes that wheels, front fenders, and headlights are the most visible surfaces and recommends placing eHMI displays on at least two of the windshield, front fenders, or side mirrors.
Significance. If the simulation parameters accurately capture real pedestrian viewpoints, the work could supply concrete guidance for eHMI placement on autonomous vehicles. The scale (15 vehicles, 57 scenarios) and the provision of a reusable simulation platform are positive features that could support follow-on studies.
major comments (2)
- [Simulation description] Simulation description (abstract and methods): no details are supplied on the visibility quantification procedure (ray-casting thresholds, occlusion test, surface sampling, etc.), nor are any statistical tests, error bars, or sensitivity results reported on the surface-exposure counts. This directly affects the robustness of the ranking that identifies wheels, front fenders, and headlights as most visible.
- [Simulation scenarios] Camera and scenario parameters: the chosen camera heights, lateral offsets, distances (min/max), and directions are presented without empirical grounding in measured pedestrian eye heights, typical sidewalk-to-lane distances, or head-orientation data, and no cross-validation or sensitivity analysis against field observations is described. Because the central claim and design recommendation rest on these frequency counts, the lack of validation is load-bearing.
minor comments (2)
- [Abstract] The abstract states that variables include 'camera position and direction' but does not enumerate the exact ranges or distributions used; a table or supplementary figure listing these parameters would improve reproducibility.
- [Conclusion] The recommendation to place displays on 'at least two' of the listed regions would benefit from a brief justification of the number two and from clarifying whether the three candidate regions are ranked by visibility or by some other criterion.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review of our manuscript. The comments highlight important areas for improving the transparency and robustness of our simulation study, and we have revised the paper to address these points directly.
read point-by-point responses
-
Referee: Simulation description (abstract and methods): no details are supplied on the visibility quantification procedure (ray-casting thresholds, occlusion test, surface sampling, etc.), nor are any statistical tests, error bars, or sensitivity results reported on the surface-exposure counts. This directly affects the robustness of the ranking that identifies wheels, front fenders, and headlights as most visible.
Authors: We agree that the original methods section provided insufficient detail on the visibility quantification procedure. In the revised manuscript we have added a complete description of the Unity ray-casting implementation, including the exact visibility thresholds, occlusion testing logic, and surface sampling method. We have also included statistical tests on the exposure counts, error bars on the reported frequencies, and sensitivity results that support the robustness of the ranking for wheels, front fenders, and headlights. revision: yes
-
Referee: Camera and scenario parameters: the chosen camera heights, lateral offsets, distances (min/max), and directions are presented without empirical grounding in measured pedestrian eye heights, typical sidewalk-to-lane distances, or head-orientation data, and no cross-validation or sensitivity analysis against field observations is described. Because the central claim and design recommendation rest on these frequency counts, the lack of validation is load-bearing.
Authors: We acknowledge the value of empirical grounding for the camera parameters. The revised methods section now cites peer-reviewed sources for average pedestrian eye heights, typical sidewalk-to-lane distances, and head-orientation ranges to justify the chosen values. We have additionally performed and reported a sensitivity analysis that varies these parameters within documented ranges and shows limited impact on the surface-exposure rankings. A new field-observation cross-validation study lies outside the scope of the present simulation paper; the sensitivity results nevertheless provide quantitative support for the stability of our conclusions. revision: partial
Circularity Check
No circularity; simulation outputs are independent of inputs
full rationale
The paper describes a Unity-based simulation that places cameras at chosen positions, heights, distances, and directions across 15 vehicles and 57 scenarios, then tallies visibility frequencies of surfaces such as wheels, front fenders, and headlights via ray-casting or occlusion checks. The resulting ranking and eHMI placement suggestion are direct empirical counts from these runs. No equations, fitted parameters, or self-citations are invoked to derive the ordering; the methodology is self-contained as a forward simulation whose outputs are not forced by construction to match any prior result or definition within the paper.
Axiom & Free-Parameter Ledger
free parameters (2)
- Number of vehicles modeled
- Number of scenarios
axioms (1)
- domain assumption Unity game-engine rendering and camera placement produce visibility counts that generalize to real-world pedestrian observation of moving vehicles.
Forward citations
Cited by 2 Pith papers
-
Defining an Evaluation Method for External Human-Machine Interfaces
The authors define and demonstrate a 223-question evaluation method for eHMI proposals, tested on four existing designs plus a kinematic baseline, suggesting a hybrid kinematics-plus-text approach as potentially stron...
-
Using Unwrapped Full Color Space Recording to Measure the Exposedness of Vehicle Exterior Parts for External Human Machine Interfaces
Simulations show front vehicle parts are often obstructed, so eHMIs should use a distributive placement on windshield and fenders.
Reference graph
Works this paper leans on
-
[1]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in ":" * " " * FUNCTION f...
-
[2]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in ":" * " " * FUNCTION f...
-
[3]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in ":" * " " * FUNCTION f...
-
[4]
author Alhawiti, A. , author Kwigizile, V. , author Oh, J.S. , author Asher, Z.D. , author Hakimi, O. , author Aljohani, S. , author Ayantayo, S. , year 2024 . title The Effectiveness of eHMI Displays on Pedestrian – Autonomous Vehicle Interaction in Mixed - Traffic Environments . journal Sensors (Basel, Switzerland) volume 24 , pages 5018 . https://www.n...
-
[5]
author Aversa, D. , year 2022 . title Unity artificial intelligence programming : Add powerful, believable, and fun AI entities in your game with the power of Unity . edition Fifth edition ed., publisher Packt Publishing , address Birminham, UK
work page 2022
-
[6]
author Bazilinskyy, P. , author Dodou, D. , author de Winter, J. , year 2019 . title Survey on eHMI concepts: The effect of text, color, and perspective . journal Transportation Research Part F: Traffic Psychology and Behaviour volume 67 , pages 175--194 . https://www.sciencedirect.com/science/article/pii/S1369847819302293, :10.1016/j.trf.2019.10.013. [ [...
-
[7]
author de Clercq, K. , author Dietrich, A. , author Núñez Velasco, J.P. , author de Winter, J. , author Happee, R. , year 2019 . title External Human - Machine Interfaces on Automated Vehicles : Effects on Pedestrian Crossing Decisions . journal Human Factors volume 61 , pages 1353--1370 . https://journals.sagepub.com/doi/10.1177/0018720819836343, :10.117...
-
[8]
title Office of Highway Policy Information - Policy Federal Highway Administration
author Federal Highway Administration , . title Office of Highway Policy Information - Policy Federal Highway Administration . https://www.fhwa.dot.gov/policyinformation/tmguide/tmg_2013/vehicle-types.cfm. [ [@fishermans] (2024) ] fishermans_ford_2024 author [@fishermans] , year 2024 . title Ford Edge 2006 lowpoly for 3D -printing . https://sketchfab.com/...
work page 2024
-
[9]
author Guo, F. , author Lyu, W. , author Ren, Z. , author Li, M. , author Liu, Z. , year 2022 . title A Video - Based , Eye - Tracking Study to Investigate the Effect of eHMI Modalities and Locations on Pedestrian – Automated Vehicle Interaction . journal Sustainability volume 14 , pages 5633 . https://www.mdpi.com/2071-1050/14/9/5633, :10.3390/su14095633...
-
[10]
author Rodríguez Palmeiro, A. , author van der Kint, S. , author Vissers, L. , author Farah, H. , author de Winter, J.C.F. , author Hagenzieker, M. , year 2018 . title Interaction between pedestrians and automated vehicles: A Wizard of Oz experiment . journal Transportation Research Part F: Traffic Psychology and Behaviour volume 58 , pages 1005--1020 . h...
-
[11]
author Troel-Madec, M. , author Boissieux, L. , author Borkoswki, S. , author Vaufreydaz, D. , author Alaimo, J. , author Chatagnon, S. , author Spalanzani, A. , year 2019 . title eHMI positioning for autonomous vehicle/pedestrians interaction , in: booktitle Adjunct Proceedings of the 31st Conference on l' Interaction Homme - Machine , publisher Associat...
-
[12]
author de Winter, J. , author Bazilinskyy, P. , author Wesdorp, D. , author de Vlam, V. , author Hopmans, B. , author Visscher, J. , author Dodou, D. , year 2020 . title How do pedestrians distribute their visual attention when walking through a parking garage? An eye-tracking study . journal Ergonomics volume 64 , pages 793--805 . https://www.tandfonline...
-
[13]
author de Winter, J. , author Dodou, D. , year 2022 . title External human–machine interfaces: Gimmick or necessity? journal Transportation Research Interdisciplinary Perspectives volume 15 , pages 100643 . https://www.sciencedirect.com/science/article/pii/S2590198222001051, :10.1016/j.trip.2022.100643
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.