Using Unwrapped Full Color Space Recording to Measure the Exposedness of Vehicle Exterior Parts for External Human Machine Interfaces
Pith reviewed 2026-05-10 15:56 UTC · model grok-4.3
The pith
A simulation of pedestrian crossings finds that eHMIs on bumpers and grills can be blocked by other vehicles, so visibility improves with simultaneous placement on the windshield and frontal fenders.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
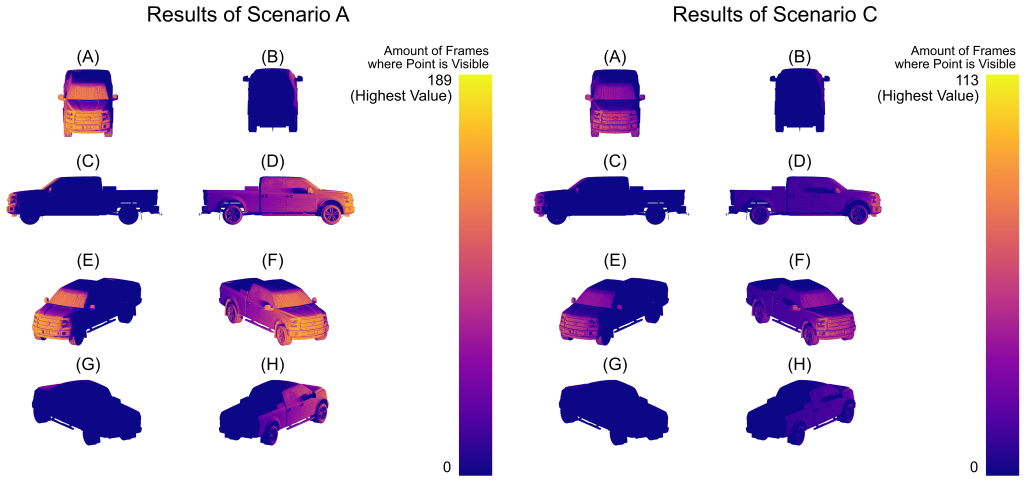
By unwrapping the exterior mesh of a 2015 Ford F-150 into a full-color texture and running animated pedestrian-crossing scenes in Unity, the study records which colored regions are unobstructed from the pedestrian's viewpoint across many frames. Cross-referencing these counts with a part-labeled map shows the bumper, grill, and hood as the most exposed surfaces, but the presence of other vehicles in the same lane can hide them. The authors therefore conclude that eHMI placement must be distributed, specifically combining the windshield and frontal fenders, to maintain reliable visibility regardless of surrounding traffic.
What carries the argument
Unwrapped full color space recording, which assigns each face of the vehicle mesh a unique color on a texture map so that simulation frames can tally visible parts by color detection.
If this is right
- Bumper, grill, and hood placements alone are insufficient when other cars occupy the same lane.
- Simultaneous use of windshield and frontal fenders supplies more consistent visibility to a crossing pedestrian.
- The color-unwrapping method can be reapplied to test visibility on different vehicle shapes or intersection geometries.
- Reliable eHMI placement supports clearer intent signaling and may reduce pedestrian hesitation around autonomous vehicles.
Where Pith is reading between the lines
- The same recording technique could be extended to measure visibility for cyclists or drivers in adjacent lanes.
- Design guidelines for autonomous vehicles might eventually specify minimum exposed area requirements based on this kind of simulation data.
- Physical experiments that vary lighting, weather, and pedestrian height would test whether the simulation rankings remain stable.
Load-bearing premise
The chosen Unity simulation of one pedestrian crossing a four-way intersection captures the same visibility conditions that would occur with real vehicles, real pedestrians, and varied traffic layouts.
What would settle it
A side-by-side comparison of the simulation counts against footage from cameras mounted on an actual Ford F-150 at a real intersection with multiple vehicles present.
Figures







read the original abstract
One of the concerns with autonomous vehicles is their ability to communicate their intent to other road users, specially pedestrians, in order to prevent accidents. External Human-Machine Interfaces (eHMIs) are the proposed solution to this issue, through the introduction of electronic devices on the exterior of a vehicle that communicate when the vehicle is planning on slowing down or yielding. This paper uses the technique of unwrapping the faces of a mesh onto a texture where every pixel is a unique color, as well as a series of animated simulations made and ran in the Unity game engine, to measure how many times is each point on a 2015 Ford F-150 King Ranch is unobstructed to a pedestrian attempting to cross the road at a four-way intersection. By cross-referencing the results with a color-coded map of the labeled parts on the exterior of the vehicle, it was concluded that while the bumper, grill, and hood were the parts of the vehicle visible to the crossing pedestrian most often, the existence of other vehicles on the same lane that might obstruct the view of these makes them insufficient. The study recommends instead a distributive approach to eHMIs by using both the windshield and frontal fenders as simultaneous placements for these devices.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper describes a Unity-based simulation method that unwraps a 2015 Ford F-150 mesh onto a unique-color texture to count visible pixels of each exterior part from a single pedestrian viewpoint at a four-way intersection. It reports that the bumper, grill, and hood are the most frequently visible parts but concludes these are insufficient because other vehicles in the same lane may occlude them, and therefore recommends a distributive eHMI placement using both the windshield and frontal fenders simultaneously.
Significance. If the visibility rankings prove robust, the work supplies a quantitative, mesh-unwrapping technique for measuring exposedness that could guide eHMI placement decisions on autonomous vehicles. The approach of assigning unique colors to mesh faces and tallying rendered pixels offers a precise, repeatable way to compare part visibility without manual annotation, which is a methodological strength.
major comments (2)
- [Results and Discussion] The central recommendation that bumper/grill/hood placements are insufficient (and that windshield + frontal fenders should be used instead) rests entirely on pixel-count rankings obtained from one static pedestrian position and one four-way intersection configuration that includes other vehicles. No sensitivity analysis to pedestrian height, lateral position, or traffic density is reported, so the occlusion argument cannot be assessed for robustness.
- [Methodology] The simulation logic is described as straightforward, yet the manuscript supplies no validation of the Unity rendering against real-world camera data, no error bounds on the color-unwrapping counts, and no comparison to physical line-of-sight measurements. Because the part-ranking and placement advice depend directly on these counts being representative, the absence of such checks is load-bearing.
minor comments (2)
- [Abstract] The abstract contains minor grammatical issues (e.g., 'specially' should be 'especially'; 'how many times is each point ... unobstructed' is awkward) that should be corrected for clarity.
- [Introduction] The paper would benefit from explicit citation of prior eHMI visibility studies to situate the quantitative method against existing qualitative or camera-based approaches.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope of our simulation study on measuring vehicle part visibility for eHMI design. We respond to each major comment below.
read point-by-point responses
-
Referee: [Results and Discussion] The central recommendation that bumper/grill/hood placements are insufficient (and that windshield + frontal fenders should be used instead) rests entirely on pixel-count rankings obtained from one static pedestrian position and one four-way intersection configuration that includes other vehicles. No sensitivity analysis to pedestrian height, lateral position, or traffic density is reported, so the occlusion argument cannot be assessed for robustness.
Authors: We agree that the analysis uses a single pedestrian viewpoint and intersection layout. This specific setup was selected to illustrate a common crossing scenario in which other vehicles in the same lane can occlude the front bumper, grill, and hood. The distributive placement recommendation follows directly from that observation in the simulated case. In the revised manuscript we will add explicit discussion of this limitation, stating that the findings are illustrative rather than universal and that sensitivity analyses across pedestrian heights, positions, and traffic densities would be valuable extensions. revision: partial
-
Referee: [Methodology] The simulation logic is described as straightforward, yet the manuscript supplies no validation of the Unity rendering against real-world camera data, no error bounds on the color-unwrapping counts, and no comparison to physical line-of-sight measurements. Because the part-ranking and placement advice depend directly on these counts being representative, the absence of such checks is load-bearing.
Authors: The manuscript introduces the color-unwrapping technique as a deterministic, annotation-free method for counting visible pixels inside a Unity simulation. Because the work is simulation-only, real-world camera validation and physical line-of-sight comparisons were outside its scope. We will revise the methodology and limitations sections to state the rendering assumptions, note that pixel counts are exact within the simulated environment, and acknowledge that discrepancies with real cameras (lighting, lens effects) remain unquantified. This will make the intended scope of the rankings clearer. revision: yes
- Real-world validation of the Unity rendering against camera data and physical line-of-sight measurements
Circularity Check
No circularity: results are direct simulation pixel counts
full rationale
The paper derives part-visibility rankings solely from Unity rendering counts after assigning unique colors to unwrapped mesh faces and tallying unobstructed pixels from a fixed pedestrian viewpoint. No equations, fitted parameters, or predictions are present that reduce to their own inputs by construction. No self-citations, uniqueness theorems, or ansatzes are invoked as load-bearing steps. The method is a straightforward measurement pipeline whose outputs (visibility frequencies per part) follow directly from the simulation geometry and color-mapping procedure without circular reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Holiday, 2015 Ford F150 King Ranch Edition
D. Holiday, 2015 Ford F150 King Ranch Edition
work page 2015
- [2]
-
[3]
J. Kobbert, A. Erkan, J. D. Bullough, and T. Q. Khanh, “A Novel Way of Optimizing Headlight Distributions Based on Real Life Traffic and Eye Tracking Data Part 1: Idealized Baseline Distribution,” Applied Sciences, vol. 13, no. 17, p. 9908, Jan. 2023, doi: 10.3390/app13179908
- [4]
- [5]
-
[6]
Harry Moss Traquair, An Introduction to Clinical Perimetry, Sixth Edition. London: Henry Kimpton,
- [7]
-
[8]
Analytical Study on the Exposedness of Potential Positions for External Human-Machine Interfaces
J. Gonzalez-Belmonte and J. Kwon, “Analytical Study on the Exposedness of Potential Positions for External Human- Machine Interfaces,” Feb. 13, 2026, arXiv: arXiv:2507.08973. doi: 10.48550/arXiv.2507.08973.. Unpublished
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2507.08973 2026
- [9]
-
[10]
Corrections to: Peripheral vision and pattern recognition: A review,
H. Strasburger, I. Rentschler, and M. J ¨uttner, “Corrections to: Peripheral vision and pattern recognition: A review,” Journal of Vision, vol. 24, no. 4, p. 15, Apr. 2024, doi: 10.1167/jov.24.4.15
-
[11]
X. Chen, X. Li, Y . Hou, W. Yang, C. Dong, and H. Wang, “Effect of eHMI-equipped automated vehicles on pedestrian crossing behavior and safety: A focus on blind spot scenarios,” Accident Analysis & Preven- tion, vol. 212, p. 107915, Mar. 2025, doi: 10.1016/j.aap.2025.107915
-
[12]
M. Troel–madec et al., “eHMI positioning for autonomous vehi- cle/pedestrians interaction,” in IHM 2019 - 31e conf ´erence francophone sur l’Interaction Homme-Machine, Grenoble, France: ACM, Dec. 2019, pp. 1–8. doi: 10.1145/3366551.3370340
-
[13]
K. de Clercq, A. Dietrich, J. P. N ´u˜nez Velasco, J. de Winter, and R. Happee, “External Human-Machine Interfaces on Automated Vehicles: Effects on Pedestrian Crossing Decisions,” Hum Factors, vol. 61, no. 8, pp. 1353–1370, Dec. 2019, doi: 10.1177/0018720819836343
-
[14]
J. de Winter and D. Dodou, “External human–machine interfaces: Gim- mick or necessity?,” Transportation Research Interdisciplinary Perspec- tives, vol. 15, p. 100643, Sep. 2022, doi: 10.1016/j.trip.2022.100643
-
[15]
M. Lau, H. P. Nguyen, M. Jipp, and M. Oehl, “From Visions to Reality: Investigating the Interplay of Vehicle Kinematics and Light- band eHMI in a Real Vehicle Study,” Transportation Research Part F: Traffic Psychology and Behaviour, vol. 103, pp. 79–95, May 2024, doi: 10.1016/j.trf.2024.03.004
-
[16]
A. Rodr ´ıguez Palmeiro, S. van der Kint, L. Vissers, H. Farah, J. C. F. de Winter, and M. Hagenzieker, “Interaction between pedestrians and auto- mated vehicles: A Wizard of Oz experiment,” Transportation Research Part F: Traffic Psychology and Behaviour, vol. 58, pp. 1005–1020, Oct. 2018, doi: 10.1016/j.trf.2018.07.020
-
[17]
C. MacLachlan and H. C. Howland, “Normal values and standard deviations for pupil diameter and interpupillary distance in subjects aged 1 month to 19 years,” Ophthalmic Physiol Opt, vol. 22, no. 3, pp. 175–182, May 2002, doi: 10.1046/j.1475-1313.2002.00023.x
-
[18]
“Most Popular Cars in America,” Edmunds. Accessed: Mar. 26, 2026. [Online]. Available: https://www.edmunds.com/most-popular-cars/
work page 2026
-
[19]
Measured average height, weight, and waist circumference for adults ages 20 and older
National Center for Health Statistics, “Measured average height, weight, and waist circumference for adults ages 20 and older.” Accessed: Apr. 06, 2026. [Online]. Available: https://www.cdc.gov/nchs/fastats/body- measurements.htm
work page 2026
-
[20]
Median Age in 192 Metro Areas Higher Than National Median of 39.1,
K. Wilder and P. Mackun, “Median Age in 192 Metro Areas Higher Than National Median of 39.1,” Census.gov. Accessed: Apr. 06, 2026. [On- line]. Available: https://www.census.gov/library/stories/2025/06/metro- areas-median-age.html
work page 2026
-
[21]
Peripheral vision and pattern recognition: A review,
H. Strasburger, I. Rentschler, and M. J ¨uttner, “Peripheral vision and pattern recognition: A review,” Journal of Vision, vol. 11, no. 5, p. 13, Dec. 2011, doi: 10.1167/11.5.13
-
[22]
Resolution limit of the eye — how many pixels can we see?,
M. Ashraf, A. Chapiro, and R. K. Mantiuk, “Resolution limit of the eye — how many pixels can we see?,” Nat Commun, vol. 16, no. 1, p. 9086, Oct. 2025, doi: 10.1038/s41467-025-64679-2
-
[23]
T. Auberbach and D. E. Kelm, RGB Colorspace Atlas. Accessed: Mar. 26, 2026. [Online]. Available: https://taubaauerbach.com/view.php?id=286
work page 2026
-
[24]
Seven Myths on Crowding and Peripheral Vision,
H. Strasburger, “Seven Myths on Crowding and Peripheral Vision,” i-Perception, vol. 11, no. 3, p. 2041669520913052, May 2020, doi: 10.1177/2041669520913052
-
[25]
A. H. Shah, X. Sun, and Y . Lin, “Study the Effect of eHMI Projection Distance and Contrast on People Acceptance in Blind-Spot Detection Scenario,” Applied Sciences, vol. 12, no. 13, p. 6730, Jan. 2022, doi: 10.3390/app12136730
-
[26]
P. Bazilinskyy, D. Dodou, and J. de Winter, “Survey on eHMI concepts: The effect of text, color, and perspective,” Transportation Research Part F: Traffic Psychology and Behaviour, vol. 67, pp. 175–194, Nov. 2019, doi: 10.1016/j.trf.2019.10.013
-
[27]
The effect of drivers’ eye contact on pedestrians’ perceived safety,
V . Onkhar, P. Bazilinskyy, D. Dodou, and J. C. F. de Winter, “The effect of drivers’ eye contact on pedestrians’ perceived safety,” Trans- portation Research Part F: Traffic Psychology and Behaviour, vol. 84, pp. 194–210, Jan. 2022, doi: 10.1016/j.trf.2021.10.017
-
[28]
A. Alhawiti et al., “The Effectiveness of eHMI Displays on Pedestrian–Autonomous Vehicle Interaction in Mixed-Traffic Environ- ments,” Sensors (Basel), vol. 24, no. 15, p. 5018, Aug. 2024, doi: 10.3390/s24155018
-
[29]
The Most Popular Cars in America,
A. Vidgerrman, “The Most Popular Cars in America,” The Most Popular Cars in America. Accessed: Mar. 26, 2026. [Online]. Available: https://www.autoinsurance.com/articles/most-popular-cars-america/
work page 2026
-
[30]
“Unity,” Unity. Accessed: Mar. 26, 2026. [Online]. Available: https://unity.com
work page 2026
-
[31]
What are PNG files and how do you open them? — Adobe
“What are PNG files and how do you open them? — Adobe.” Accessed: Apr. 06, 2026. [Online]. Available: https://www.adobe.com/creativecloud/file-types/image/raster/png- file.html
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.