Bio-Inspired Topological Autonomous Navigation with Active Inference in Robotics
Pith reviewed 2026-05-18 23:39 UTC · model grok-4.3
The pith
A bio-inspired active inference model enables real-time topological mapping and adaptive navigation in unknown environments without pre-training.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The Active Inference Framework can be implemented in a modular ROS2 architecture to create and update a topological map of the environment in real-time, enabling goal-directed planning for exploration and navigation that adapts to dynamic obstacles and sensor drift, performing comparably to existing strategies like Gbplanner, FAEL, and Frontiers in simulated large-scale environments.
What carries the argument
Active Inference Framework (AIF) for probabilistic reasoning that unifies mapping, localization, and adaptive decision-making to maintain a usable topological map.
If this is right
- The agent can explore large-scale simulated environments in real time.
- It adapts to dynamic obstacles and sensor drift without retraining.
- The modular ROS2 design integrates with existing navigation systems.
- It provides interpretable probabilistic reasoning for navigation decisions.
- Performance matches or approaches that of Gbplanner, FAEL, and Frontiers in tests.
Where Pith is reading between the lines
- Such a system might lower computational demands compared to deep learning based navigation.
- Extensions could include handling multi-robot coordination using shared topological maps.
- Further testing in unstructured real-world settings could reveal scalability limits.
- Integration with other sensory modalities might enhance robustness to uncertainty.
Load-bearing premise
The Active Inference Framework can be directly translated into a real-time, modular ROS2 implementation that maintains a usable topological map and produces adaptive decisions in dynamic, unknown environments without any pre-training or large datasets.
What would settle it
Observing that the agent fails to generate coherent trajectories or maintain map consistency when faced with moving obstacles or localization drift in a large simulated environment would falsify the central claim.
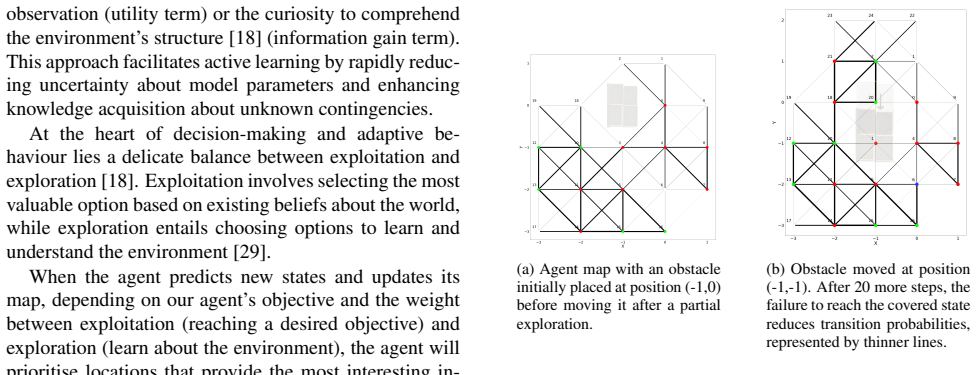
Figures





read the original abstract
Achieving fully autonomous exploration and navigation remains a critical challenge in robotics, requiring integrated solutions for localisation, mapping, decision-making and motion planning. Existing approaches either rely on strict navigation rules lacking adaptability or on pre-training, which requires large datasets. These AI methods are often computationally intensive or based on static assumptions, limiting their adaptability in dynamic or unknown environments. This paper introduces a bio-inspired agent based on the Active Inference Framework (AIF), which unifies mapping, localisation, and adaptive decision-making for autonomous navigation, including exploration and goal-reaching. Our model creates and updates a topological map of the environment in real-time, planning goal-directed trajectories to explore or reach objectives without requiring pre-training. Key contributions include a probabilistic reasoning framework for interpretable navigation, robust adaptability to dynamic changes, and a modular ROS2 architecture compatible with existing navigation systems. Our method was tested in simulated and real-world environments. The agent successfully explores large-scale simulated environments and adapts to dynamic obstacles and drift, proving to be comparable to other exploration strategies such as Gbplanner, FAEL and Frontiers. This approach offers a scalable and transparent approach for navigating complex, unstructured environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a bio-inspired autonomous navigation system based on the Active Inference Framework (AIF) that unifies mapping, localisation, decision-making and motion planning. It creates and updates a topological map in real time to enable exploration and goal-directed trajectories without pre-training or large datasets. The approach is implemented as a modular ROS2 architecture and is tested in simulated large-scale environments and real-world settings, with claims of adaptability to dynamic obstacles and sensor drift, and performance comparable to Gbplanner, FAEL and Frontiers.
Significance. If the real-time performance and experimental claims hold, the work would offer a meaningful contribution by demonstrating a unified, interpretable AIF-based framework for navigation in unknown and dynamic environments that avoids data-intensive pre-training. The modular ROS2 design is a practical strength for compatibility with existing systems. The absence of detailed quantitative metrics and scaling analysis in the evaluation sections, however, limits the current strength of the comparability and feasibility assertions.
major comments (2)
- [Results] Results section: The claim that the agent 'proves to be comparable' to Gbplanner, FAEL and Frontiers is unsupported by quantitative metrics (e.g., exploration coverage, time to goal, success rates), error bars, or statistical comparisons. This directly weakens the evaluation of the method against baselines.
- [Methods] Methods/Implementation: No details are provided on per-cycle timing, computational scaling of variational free-energy minimisation with growing topological node count, or the specific factorisation of the generative model over map states. This leaves the central real-time feasibility claim for large-scale environments unverified.
minor comments (2)
- [Abstract] Abstract: The phrasing 'proving to be comparable' should be softened to 'demonstrating performance comparable to' pending quantitative support.
- [Experiments] Ensure that all experimental environments (simulated and real-world) are described with sufficient detail for reproducibility, including map sizes and obstacle dynamics.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback on our manuscript. We have carefully reviewed each major comment and provide point-by-point responses below. We agree that additional quantitative support and implementation details will strengthen the paper and plan to incorporate these in the revised version.
read point-by-point responses
-
Referee: [Results] Results section: The claim that the agent 'proves to be comparable' to Gbplanner, FAEL and Frontiers is unsupported by quantitative metrics (e.g., exploration coverage, time to goal, success rates), error bars, or statistical comparisons. This directly weakens the evaluation of the method against baselines.
Authors: We agree that the comparability claim would be more robust with explicit quantitative metrics. The current manuscript focuses on demonstrating real-time adaptability to dynamic obstacles and sensor drift through qualitative results in simulation and real-world tests. In the revised manuscript, we will add a dedicated comparison table reporting exploration coverage, time to goal, success rates across repeated trials, standard deviations, and basic statistical comparisons against the baselines to better substantiate the evaluation. revision: yes
-
Referee: [Methods] Methods/Implementation: No details are provided on per-cycle timing, computational scaling of variational free-energy minimisation with growing topological node count, or the specific factorisation of the generative model over map states. This leaves the central real-time feasibility claim for large-scale environments unverified.
Authors: We acknowledge that more explicit implementation details are needed to verify real-time performance. The topological map is intentionally kept sparse to support scalability, but we will expand the Methods section in the revision to report measured per-cycle timings from our experiments, an analysis of how variational free-energy minimisation scales with node count (including observed growth rates in large environments), and the precise factorisation of the generative model over map states and actions. These additions will directly address the feasibility claims. revision: yes
Circularity Check
No circularity: application of established AIF framework to topological navigation
full rationale
The paper applies the Active Inference Framework—an externally established formalism—to a robotics navigation task by describing a modular ROS2 implementation that builds and updates a topological map in real time. No equations or derivations in the provided text reduce a claimed prediction or result to a fitted parameter or self-referential definition by construction. The central claims rest on implementation details and empirical comparison to baselines (Gbplanner, FAEL, Frontiers) rather than on any load-bearing self-citation chain or ansatz smuggled from prior author work. The derivation chain is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Active Inference Framework unifies mapping, localisation, and adaptive decision-making for autonomous navigation
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our model creates and updates a topological map... minimising Free Energy... POMDP... Expected Free Energy (EFE) over policies.
-
IndisputableMonolith/Foundation/DimensionForcing.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The agent successfully explores large-scale simulated environments... without requiring pre-training.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Frontier based exploration for autonomous robot,
A. Topiwala, P. Inani, and A. Kathpal, “Frontier based exploration for autonomous robot,” 2018
work page 2018
-
[2]
H. S. Hewawasam, M. Y . Ibrahim, and G. K. Ap- puhamillage, “Past, present and future of path- planning algorithms for mobile robot navigation in dynamic environments,” IEEE Open Journal of the Industrial Electronics Society , vol. 3, pp. 353–365, 2022
work page 2022
-
[3]
ORB-SLAM3: An accurate open-source library for visual, visual-inertial and multi-map SLAM,
C. Campos, R. Elvira, J. J. Gomez, J. M. M. Mon- tiel, and J. D. Tardos, “ORB-SLAM3: An accurate open-source library for visual, visual-inertial and multi-map SLAM,”IEEE Transactions on Robotics, vol. 37, no. 6, pp. 1874–1890, 2021
work page 2021
-
[4]
H. Matsuki, R. Murai, P. H. J. Kelly, and A. J. Davi- son, “Gaussian splatting slam,” 2024
work page 2024
-
[5]
Learning to explore using active neural slam,
D. S. Chaplot, D. Gandhi, S. Gupta, A. Gupta, and R. Salakhutdinov, “Learning to explore using active neural slam,” inInternational Conference on Learn- ing Representations (ICLR), 2020
work page 2020
-
[6]
Byol-explore: Exploration by boot- strapped prediction,
Z. D. Guo, S. Thakoor, M. P ˆıslar, B. A. Pires, F. Altch´e, C. Tallec, A. Saade, D. Calandriello, J.- B. Grill, Y . Tang, M. Valko, R. Munos, M. G. Azar, and B. Piot, “Byol-explore: Exploration by boot- strapped prediction,” 2022
work page 2022
-
[7]
Rapid exploration for open-world navi- gation with latent goal models,
D. Shah, B. Eysenbach, G. Kahn, N. Rhinehart, and S. Levine, “Rapid exploration for open-world navi- gation with latent goal models,” 2023
work page 2023
-
[8]
Ratslam: a hippocampal model for simultaneous localization and mapping,
M. Milford, G. Wyeth, and D. Prasser, “Ratslam: a hippocampal model for simultaneous localization and mapping,” inIEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA ’04. 2004, vol. 1, pp. 403–408 V ol.1, 2004
work page 2004
-
[9]
A. Safron, O. C ¸ atal, and T. Verbelen, “Generalized simultaneous localization and mapping (g-slam) as unification framework for natural and artificial in- telligences: towards reverse engineering the hip- pocampal/entorhinal system and principles of high- level cognition,”Frontiers in Systems Neuroscience, vol. V olume 16 - 2022, 2022
work page 2022
-
[10]
Learn- ing dynamic cognitive map with autonomous nav- igation,
D. de Tinguy, T. Verbelen, and B. Dhoedt, “Learn- ing dynamic cognitive map with autonomous nav- igation,” Frontiers in Computational Neuroscience, vol. 18, Dec. 2024
work page 2024
-
[11]
The dynamic window approach to collision avoidance,
D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Robotics and Automation Magazine , vol. 4, no. 1, pp. 23–33, 1997
work page 1997
-
[12]
FAST- LIO2: fast direct lidar-inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “FAST- LIO2: fast direct lidar-inertial odometry,” CoRR, vol. abs/2107.06829, 2021
-
[13]
Autonomous navigation of agvs in unknown cluttered environ- ments: Log-mppi control strategy,
I. S. Mohamed, K. Yin, and L. Liu, “Autonomous navigation of agvs in unknown cluttered environ- ments: Log-mppi control strategy,” IEEE Robotics and Automation Letters , vol. 7, no. 4, pp. 10240– 10247, 2022
work page 2022
-
[14]
Towards efficient mppi trajectory genera- tion with unscented guidance: U-mppi control strat- egy,
I. S. Mohamed, J. Xu, G. S. Sukhatme, and L. Liu, “Towards efficient mppi trajectory genera- tion with unscented guidance: U-mppi control strat- egy,” 2024
work page 2024
-
[15]
Etpnav: Evolving topological planning for vision-language navigation in continu- ous environments,
D. An, H. Wang, W. Wang, Z. Wang, Y . Huang, K. He, and L. Wang, “Etpnav: Evolving topological planning for vision-language navigation in continu- ous environments,” 2024
work page 2024
-
[16]
T. Parr, G. Pezzulo, and K. Friston, Active Infer- ence: The Free Energy Principle in Mind, Brain, and Behavior. The MIT Press, 03 2022
work page 2022
-
[17]
Planning and navigation as active inference,
R. Kaplan and K. Friston, “Planning and navigation as active inference,”bioRxiv, 12 2017
work page 2017
-
[18]
Computational mechanisms of curiosity and goal- directed exploration,
P. Schwartenbeck, J. Passecker, T. U. Hauser, T. H. FitzGerald, M. Kronbichler, and K. J. Friston, “Computational mechanisms of curiosity and goal- directed exploration,” eLife, vol. 8, p. e41703, may 2019
work page 2019
-
[19]
Robot navigation as hierarchical ac- tive inference,
O. C ¸ atal, T. Verbelen, T. Van de Maele, B. Dhoedt, and A. Safron, “Robot navigation as hierarchical ac- tive inference,”Neural Networks, vol. 142, pp. 192– 204, 2021
work page 2021
-
[20]
D. George, R. Rikhye, N. Gothoskar, J. S. Guntu- palli, A. Dedieu, and M. L ´azaro-Gredilla, “Clone- structured graph representations enable flexible learning and vicarious evaluation of cognitive maps,” Nature Communications, vol. 12, 04 2021
work page 2021
-
[21]
Structuring knowledge with cogni- tive maps and cognitive graphs,
M. Peer, I. K. Brunec, N. S. Newcombe, and R. A. Epstein, “Structuring knowledge with cogni- tive maps and cognitive graphs,” Trends in Cogni- tive Sciences, vol. 25, no. 1, pp. 37–54, 2021
work page 2021
-
[22]
P. Foo, W. Warren, A. Duchon, and M. Tarr, “Do humans integrate routes into a cognitive map? map- versus landmark-based navigation of novel short- cuts.,” Journal of experimental psychology. Learn- ing, memory, and cognition , vol. 31, pp. 195–215, 04 2005
work page 2005
-
[23]
The cognitive map in humans: Spatial navigation and beyond,
R. Epstein, E. Z. Patai, J. Julian, and H. Spiers, “The cognitive map in humans: Spatial navigation and beyond,” Nature Neuroscience, vol. 20, pp. 1504– 1513, 10 2017
work page 2017
-
[24]
A survey of monte carlo tree search methods,
C. B. Browne, E. Powley, D. Whitehouse, S. M. Lucas, P. I. Cowling, P. Rohlfshagen, S. Tavener, D. Perez, S. Samothrakis, and S. Colton, “A survey of monte carlo tree search methods,” IEEE Trans- actions on Computational Intelligence and AI in Games, vol. 4, no. 1, pp. 1–43, 2012
work page 2012
-
[25]
D. Ha and J. Schmidhuber, “World models,” CoRR, vol. abs/1803.10122, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[26]
Active in- ference and learning,
K. Friston, T. FitzGerald, F. Rigoli, P. Schwarten- beck, J. O. Doherty, and G. Pezzulo, “Active in- ference and learning,” Neuroscience and Biobehav- ioral Reviews, vol. 68, pp. 862–879, 2016
work page 2016
-
[27]
aws-robomaker-small-warehouse- world,
aws-robotics, “aws-robomaker-small-warehouse- world,” 2020. Accessed: 2024-08-01
work page 2020
-
[28]
Neural topological SLAM for visual navigation.CoRR, abs/2005.12256, 2020
D. S. Chaplot, R. Salakhutdinov, A. Gupta, and S. Gupta, “Neural topological SLAM for visual navigation,”CoRR, vol. abs/2005.12256, 2020
-
[29]
World model learning and inference,
K. Friston, R. J. Moran, Y . Nagai, T. Taniguchi, H. Gomi, and J. Tenenbaum, “World model learning and inference,”Neural Networks, vol. 144, pp. 573– 590, 2021
work page 2021
- [30]
- [31]
- [32]
- [33]
-
[34]
Potential field meth- ods and their inherent limitations for mobile robot navigation,
Y . Koren and J. Borenstein, “Potential field meth- ods and their inherent limitations for mobile robot navigation,” vol. 2, pp. 1398 – 1404 vol.2, 05 1991
work page 1991
-
[35]
aws-robomaker-small-house- world,
aws-robotics, “aws-robomaker-small-house- world,” 2021. Accessed: 2024-10-01
work page 2021
-
[36]
Au- tonomous mobile vehicle using ros2 and 2d- lidar and slam navigation,
P. Gyanani, M. Agarwal, R. Osari, et al. , “Au- tonomous mobile vehicle using ros2 and 2d- lidar and slam navigation,” Research Square , vol. Preprint (Version 1), May 2024. Available at Research Square
work page 2024
-
[37]
Fael: Fast autonomous exploration for large-scale environments with a mobile robot,
J. Huang, B. Zhou, Z. Fan, Y . Zhu, Y . Jie, L. Li, and H. Cheng, “Fael: Fast autonomous exploration for large-scale environments with a mobile robot,” IEEE Robotics and Automation Letters , vol. 8, pp. 1667–1674, 2023
work page 2023
-
[38]
UFOMap: An efficient probabilistic 3D mapping framework that embraces the unknown,
D. Duberg and P. Jensfelt, “UFOMap: An efficient probabilistic 3D mapping framework that embraces the unknown,” IEEE Robotics and Automation Let- ters, vol. 5, no. 4, pp. 6411–6418, 2020
work page 2020
-
[39]
Graph-based subter- ranean exploration path planning using aerial and legged robots,
T. Dang, M. Tranzatto, S. Khattak, F. Mascarich, K. Alexis, and M. Hutter, “Graph-based subter- ranean exploration path planning using aerial and legged robots,” Journal of Field Robotics , vol. 37, no. 8, pp. 1363–1388, 2020. Wiley Online Library
work page 2020
-
[40]
Team cer- berus wins the darpa subterranean challenge: Tech- nical overview and lessons learned,
M. Tranzatto, M. Dharmadhikari, L. Bernreiter, M. Camurri, S. Khattak, F. Mascarich, P. Pfre- undschuh, D. Wisth, S. Zimmermann, M. Kulka- rni, V . Reijgwart, B. Casseau, T. Homberger, P. D. Petris, L. Ott, W. Tubby, G. Waibel, H. Nguyen, C. Cadena, R. Buchanan, L. Well- hausen, N. Khedekar, O. Andersson, L. Zhang, T. Miki, T. Dang, M. Mattamala, M. Monte...
work page 2022
-
[41]
Voxblox: Incremental 3D Euclidean Signed Distance Fields for On-Board MAV Planning
H. Oleynikova, Z. Taylor, M. Fehr, J. I. Nieto, and R. Siegwart, “V oxblox: Building 3d signed distance fields for planning,” CoRR, vol. abs/1611.03631, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[42]
A goal-directed spatial navigation model using forward trajectory planning based on grid cells,
U. M. Erdem and M. Hasselmo, “A goal-directed spatial navigation model using forward trajectory planning based on grid cells,” European Journal of Neuroscience, vol. 35, no. 6, pp. 916–931, 2012
work page 2012
-
[43]
Active inference and intentional be- haviour,
K. J. Friston, T. Salvatori, T. Isomura, A. Tschantz, A. Kiefer, T. Verbelen, M. Koudahl, A. Paul, T. Parr, A. Razi, B. Kagan, C. L. Buckley, and M. J. D. Ramstead, “Active inference and intentional be- haviour,” 2023
work page 2023
-
[44]
M. Cai, E. Aasi, C. Belta, and C.-I. Vasile, “Over- coming exploration: Deep reinforcement learning for continuous control in cluttered environments from temporal logic specifications,” IEEE Robotics and Automation Letters , vol. 8, no. 4, pp. 2158– 2165, 2023
work page 2023
-
[45]
How to build a cogni- tive map,
J. C. R. Whittington, D. McCaffary, J. J. W. Baker- mans, and T. E. J. Behrens, “How to build a cogni- tive map,” Nature Neuroscience, vol. 25, pp. 1257– 1272, October 2022. Epub 2022 Sep 26
work page 2022
-
[46]
R. Smith, P. Schwartenbeck, T. Parr, and K. J. Friston, “An active inference approach to model- ing structure learning: Concept learning as an ex- ample case,” Frontiers in Computational Neuro- science, vol. 14, 2020
work page 2020
-
[47]
K. Friston, T. Parr, and P. Zeidman, “Bayesian model reduction,” 2019
work page 2019
-
[48]
Ex- ploring and learning structure: Active inference ap- proach in navigational agents,
D. de Tinguy, T. Verbelen, and B. Dhoedt, “Ex- ploring and learning structure: Active inference ap- proach in navigational agents,” 2024
work page 2024
-
[49]
Object goal navigation using goal-oriented semantic exploration,
D. S. Chaplot, D. Gandhi, A. Gupta, and R. Salakhutdinov, “Object goal navigation using goal-oriented semantic exploration,” 2020
work page 2020
-
[50]
de Tinguy, Daria and Van de Maele, Toon and Ver- belen, Tim and Dhoedt, Bart, “Spatial and tempo- ral hierarchy for autonomous navigation using ac- tive inference in minigrid environment,”ENTROPY, vol. 26, no. 1, p. 32, 2024
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.