STL-Based Motion Planning and Uncertainty-Aware Risk Analysis for Human-Robot Collaboration with a Multi-Rotor Aerial Vehicle
Pith reviewed 2026-05-18 17:05 UTC · model grok-4.3
The pith
Signal temporal logic specifications let a multi-rotor vehicle plan safe trajectories for human collaboration while quantifying risks from pose uncertainty and replanning on events.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
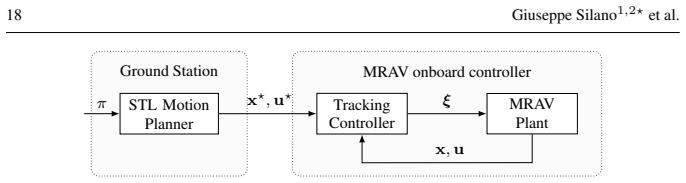
The paper claims that mission objectives for human-robot collaboration, including safety, temporal requirements, and human preferences such as ergonomics and comfort, can be encoded as signal temporal logic specifications. These specifications drive an optimization-based planner that produces dynamically feasible trajectories while respecting the multi-rotor vehicle's nonlinear dynamics and actuation constraints. Smooth robustness approximations and gradient-based techniques are used to solve the resulting non-convex problem. An uncertainty-aware risk analysis then quantifies the likelihood of specification violations under human-pose uncertainty, and a robustness-aware event-triggered repla
What carries the argument
Signal temporal logic specifications that encode safety, timing, and ergonomic requirements, used inside an optimization planner with smoothed robustness measures, uncertainty-aware risk quantification, and robustness-triggered replanning.
If this is right
- The generated trajectories keep required safety distances, satisfy timing windows, and respect ergonomic preferences for the human partner.
- Risk values give a concrete probability that human position errors will cause a rule violation during execution.
- Event-triggered replanning restores robustness margins after disturbances without stopping the overall task.
- The planner accounts for the full nonlinear vehicle dynamics and actuator limits while still running at usable speeds.
Where Pith is reading between the lines
- The same encoding of rules and risk checks could be tried on longer-duration missions or tasks with multiple humans to test whether replanning stays fast enough.
- Pairing the uncertainty model with onboard cameras for live human tracking might shrink the safety margins the system must keep.
- The approach could be ported to ground vehicles or robotic arms in similar shared workspaces to see if the core machinery transfers.
Load-bearing premise
Smooth approximations of the temporal logic robustness turn the non-convex planning problem into one that gradient-based solvers can handle reliably in real time without poor local solutions or constraint violations.
What would settle it
In the Gazebo simulation of the object handover, increase the level of human pose noise and measure whether the actual rate of safety or comfort violations exceeds the risk probabilities computed by the analysis or whether replanning fails to restore margins before a violation occurs.
Figures







read the original abstract
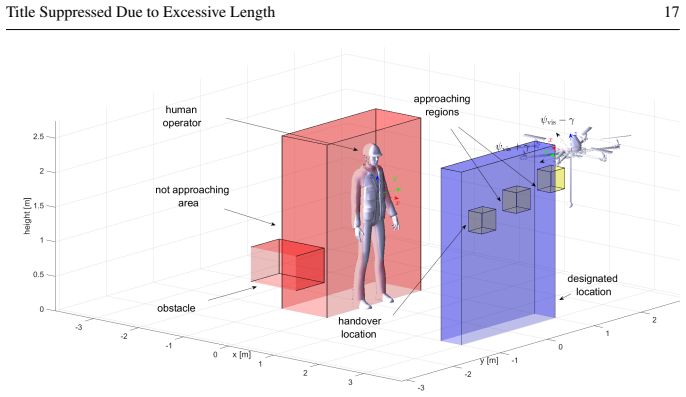
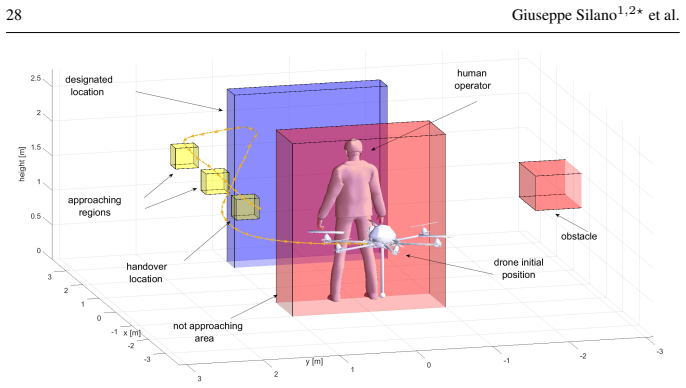
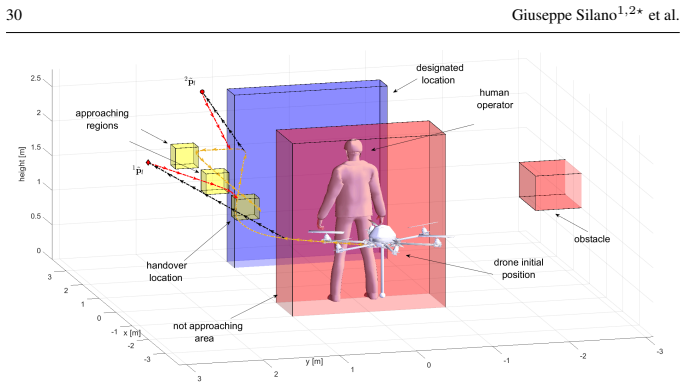
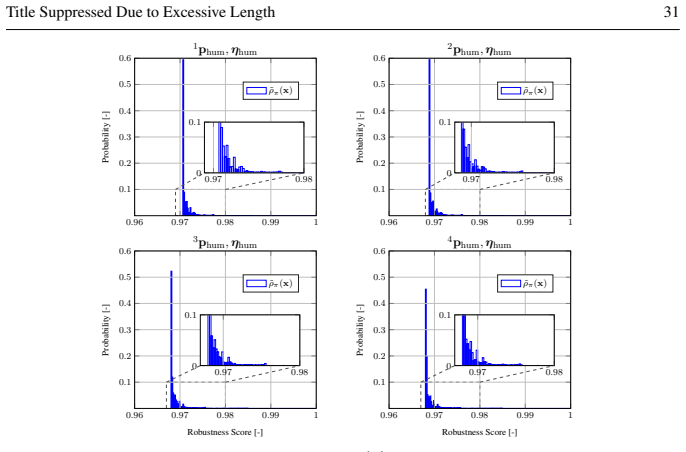
This paper presents a motion planning and risk analysis framework for enhancing human-robot collaboration with a Multi-Rotor Aerial Vehicle. The proposed method employs Signal Temporal Logic to encode key mission objectives, including safety, temporal requirements, and human preferences, with particular emphasis on ergonomics and comfort. An optimization-based planner generates dynamically feasible trajectories while explicitly accounting for the vehicle's nonlinear dynamics and actuation constraints. To address the resulting non-convex and non-smooth optimization problem, smooth robustness approximations and gradient-based techniques are adopted. In addition, an uncertainty-aware risk analysis is introduced to quantify the likelihood of specification violations under human-pose uncertainty. A robustness-aware event-triggered replanning strategy further enables online recovery from disturbances and unforeseen events by preserving safety margins during execution. The framework is validated through MATLAB and Gazebo simulations on an object handover task inspired by power line maintenance scenarios. Results demonstrate the ability of the proposed method to achieve safe, efficient, and resilient human-robot collaboration under realistic operating conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a motion planning and risk analysis framework for human-robot collaboration using a multi-rotor aerial vehicle. Mission objectives including safety, temporal requirements, ergonomics, and comfort are encoded via Signal Temporal Logic (STL). An optimization-based planner generates dynamically feasible trajectories subject to nonlinear quadrotor dynamics and actuation limits; smooth robustness approximations enable gradient-based solution of the resulting non-convex program. An uncertainty-aware risk analysis quantifies specification-violation likelihood under human-pose uncertainty, and a robustness-aware event-triggered replanning strategy supports online recovery. The approach is validated in MATLAB and Gazebo simulations on an object-handover task inspired by power-line maintenance.
Significance. If the empirical results and optimization reliability hold, the work would offer a concrete pipeline for STL-specified aerial HRC that explicitly handles human uncertainty and provides recovery mechanisms. The emphasis on ergonomics within STL and the combination of risk analysis with event-triggered replanning are constructive contributions to safe aerial robotics. The significance is currently limited by the absence of reported quantitative metrics, success rates, or formal guarantees on the approximations.
major comments (2)
- [Optimization paragraph] Optimization paragraph: the central claim that the framework produces safe, dynamically feasible trajectories in real time rests on reliable solution of the non-convex STL-robustness program. No initialization strategy, multi-start procedure, or Monte-Carlo success-rate statistics under varying human poses are reported; without such evidence the assumption that gradient descent on the smoothed problem avoids infeasible local minima remains unverified.
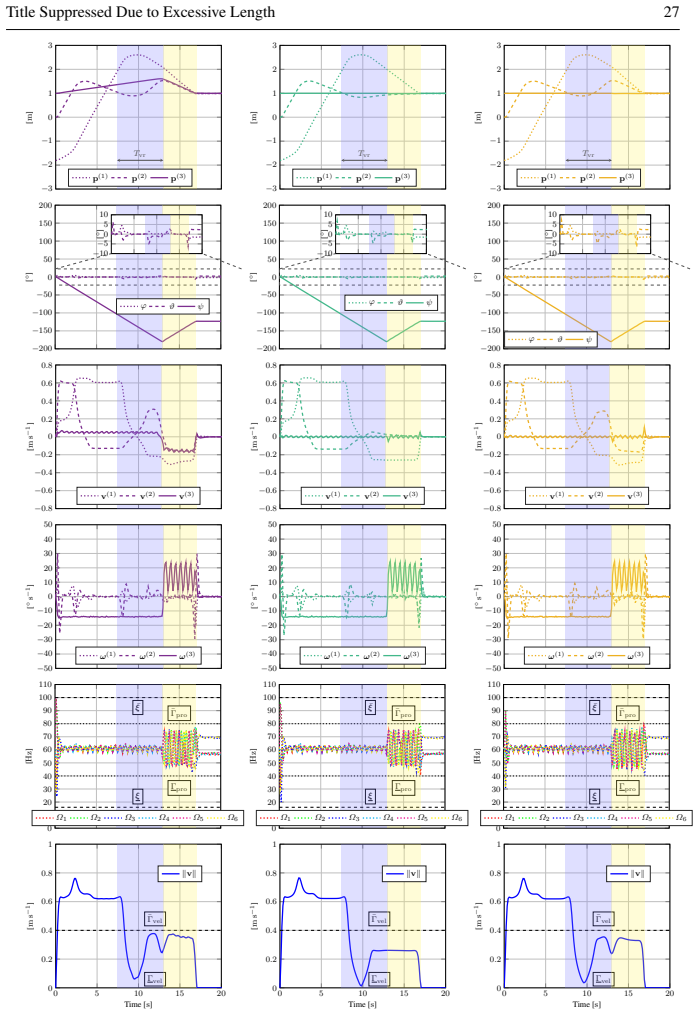
- [Validation / Results section] Validation / Results section: the abstract states that simulations demonstrate safe, efficient, and resilient collaboration, yet no quantitative metrics (e.g., STL robustness values, violation probabilities, computation times, or success rates across trials) are supplied. This absence prevents assessment of whether the smooth approximations preserve the original STL semantics or whether the risk-analysis bounds are tight.
minor comments (2)
- [Preliminaries] Notation for the STL robustness function and the uncertainty model should be introduced with explicit definitions before their use in the optimization objective.
- [Figures] Figure captions for the Gazebo simulation snapshots should include the corresponding STL robustness values and risk estimates at the depicted instants.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and detailed comments on our manuscript. We address each major comment point by point below, outlining the revisions we intend to make to strengthen the presentation of the optimization reliability and quantitative validation results.
read point-by-point responses
-
Referee: [Optimization paragraph] Optimization paragraph: the central claim that the framework produces safe, dynamically feasible trajectories in real time rests on reliable solution of the non-convex STL-robustness program. No initialization strategy, multi-start procedure, or Monte-Carlo success-rate statistics under varying human poses are reported; without such evidence the assumption that gradient descent on the smoothed problem avoids infeasible local minima remains unverified.
Authors: We agree that explicit evidence for solver reliability is needed to support the claims. The current manuscript describes the use of smooth robustness approximations to enable gradient-based optimization but does not detail the initialization procedure or provide statistical success rates. In the revised version we will add a dedicated paragraph on the optimization implementation, specifying the warm-start initialization from the previous planning cycle's solution and reporting Monte-Carlo results (e.g., success rates over 100 trials with randomized human poses) to demonstrate that feasible trajectories are consistently obtained. revision: yes
-
Referee: [Validation / Results section] Validation / Results section: the abstract states that simulations demonstrate safe, efficient, and resilient collaboration, yet no quantitative metrics (e.g., STL robustness values, violation probabilities, computation times, or success rates across trials) are supplied. This absence prevents assessment of whether the smooth approximations preserve the original STL semantics or whether the risk-analysis bounds are tight.
Authors: We concur that the absence of quantitative metrics limits the ability to evaluate the approximations and risk analysis. The revised Results section will be expanded to include tables reporting average and minimum STL robustness values, empirical violation probabilities obtained from the uncertainty-aware analysis, mean and worst-case computation times, and success rates across repeated simulation trials under varying conditions. These additions will allow direct assessment of approximation fidelity and bound tightness while preserving the existing qualitative simulation descriptions. revision: yes
Circularity Check
No significant circularity; forward engineering pipeline with independent components
full rationale
The paper presents a motion planning framework that encodes objectives via STL, solves a non-convex optimization with smooth approximations and gradient-based methods, adds uncertainty-aware risk quantification, and uses event-triggered replanning. No equations or steps reduce a claimed prediction or result to a fitted parameter or self-citation by construction. The derivation chain consists of standard engineering choices (STL robustness, nonlinear dynamics constraints, Monte-Carlo risk analysis) whose outputs are validated in simulation rather than forced by redefinition of inputs. The central claims remain self-contained against external benchmarks such as simulation outcomes and do not rely on load-bearing self-citations or ansatzes imported from prior author work.
Axiom & Free-Parameter Ledger
free parameters (1)
- STL robustness weights and optimization cost coefficients
axioms (2)
- domain assumption The vehicle's nonlinear dynamics and actuation constraints can be incorporated into a non-convex optimization problem that remains tractable with smooth approximations.
- domain assumption Human pose uncertainty can be modeled sufficiently well to compute meaningful violation probabilities.
Reference graph
Works this paper leans on
-
[1]
In: 2013 American Control Conference, pp
Abbas, H., Fainekos, G.: Computing descent direction of MTL robustness for non-linear systems. In: 2013 American Control Conference, pp. 4405–4410 (2013). DOI 10.1109/ACC.2013.6580518. URL https://ieeexplore.ieee.org/document/6580518
-
[2]
Abbas, H., Fainekos, G., Sankaranarayanan, S., Ivan ˇci´c, F., Gupta, A.: Probabilistic Temporal Logic Falsification of Cyber-Physical Systems. ACM Transaction on Embedded Computing Systems12(2s) Title Suppressed Due to Excessive Length 35 (2013). DOI doi.org/10.1145/2465787.2465797. URLhttps://dl.acm.org/doi/10.1145/ 2465787.2465797
-
[3]
Afifi, A., van Holland, M., Franchi, A.: Toward Physical Human-Robot Interaction Control with Aerial Manipulators: Compliance, Redundancy Resolution, and Input Limits. In: 2022 International Conference on Robotics and Automation, pp. 4855–4861 (2022). DOI 10.1109/ICRA46639.2022. 9812451. URLhttps://ieeexplore.ieee.org/document/9812451
-
[4]
Autonomous Robots42(5), 957–975 (2018)
Ajoudani, A., Zanchettin, A.M., Ivaldi, S., Albu-Schffer, A., Kosuge, K., Khatib, O.: Progress and prospects of the human-robot collaboration. Autonomous Robots42(5), 957–975 (2018). DOI 10.1007/s10514-017-9677-2. URLhttps://link.springer.com/article/10.1007/ s10514-017-9677-2
-
[5]
IEEE Access8, 201300–201316 (2020)
Alc ´antara, A., Capit ´an, J., Torres-Gonz ´alez, A., Cunha, R., Ollero, A.: Autonomous Execution of Cinematographic Shots With Multiple Drones. IEEE Access8, 201300–201316 (2020). DOI 10.1109/ ACCESS.2020.3036239. URLhttps://ieeexplore.ieee.org/document/9249238
-
[6]
Information Processing Letters21, 181–185 (1985)
Alpern, B., Schneider, F.B.: Defining liveness. Information Processing Letters21, 181–185 (1985). DOI 10.1016/0020-0190(85)90056-0. URLhttps://www.sciencedirect.com/ science/article/abs/pii/0020019085900560
-
[7]
In: International Conference on Formal Modeling and Anal- ysis of Timed Systems, pp
Barbosa, F.S., Karlsson, J., Tajvar, P., Tumova, J.: Formal Methods for Robot Motion Planning with Time and Space Constraints. In: International Conference on Formal Modeling and Anal- ysis of Timed Systems, pp. 1–10 (2021). DOI 10.1007/978-3-030-85037-1 1. URLhttps: //link.springer.com/chapter/10.1007/978-3-030-85037-1_1
-
[8]
IEEE Robotics & Automation Magazine 14(1), 61–70 (2007)
Belta, C., Bicchi, A., Egerstedt, M., Frazzoli, E., Klavins, E., Pappas, G.J.: Symbolic planning and control of robot motion [Grand Challenges of Robotics]. IEEE Robotics & Automation Magazine 14(1), 61–70 (2007). DOI 10.1109/MRA.2007.339624. URLhttps://ieeexplore.ieee. org/document/4141034
-
[9]
IEEE Robotics and Automation Letters7(4), 9129–9136 (2022)
Benzi, F., Brunner, M., Tognon, M., Secchi, C., Siegwart, R.: Adaptive Tank-based Control for Aerial Physical Interaction with Uncertain Dynamic Environments Using Energy-Task Estimation. IEEE Robotics and Automation Letters7(4), 9129–9136 (2022). DOI 10.1109/LRA.2022.3190074. URL https://ieeexplore.ieee.org/document/9826901
-
[10]
In: 2016 IEEE International Conference on Robotics and Automation, pp
Berkenkamp, F., Schoellig, A.P., Krause, A.: Safe controller optimization for quadrotors with Gaus- sian processes. In: 2016 IEEE International Conference on Robotics and Automation, pp. 491– 496 (2016). DOI 10.1109/ICRA.2016.7487170. URLhttps://ieeexplore.ieee.org/ document/7487170
-
[11]
Bertsekas, D.: Dynamic programming and optimal control. Athena Scientific (2012). URLhttp: //www.athenasc.com/dpbook.html
work page 2012
-
[12]
Au- tonomous Robots10, 185–202 (2001)
Butler, J., Agah, A.: Psychological effects of behavior patterns of a mobile personal robot. Au- tonomous Robots10, 185–202 (2001). DOI 10.1023/A:1008986004181. URLhttps://link. springer.com/article/10.1023/A:1008986004181
-
[13]
IEEE Access11, 81361–81377 (2023)
Caballero, A., Silano, G.: A Signal Temporal Logic Motion Planner for Bird Diverter Installation Tasks with Multi-Robot Aerial Systems. IEEE Access11, 81361–81377 (2023). DOI 10.1109/ ACCESS.2023.3300240. URLhttps://ieeexplore.ieee.org/document/10197369
-
[14]
In: Companion of the 2024 ACM/IEEE In- ternational Conference on Human-Robot Interaction, pp
Cauchard, J.R., Dutau, C., Corsini, G., Cognetti, M., Sidobre, D., Lacroix, S., Brock, A.M.: Con- siderations for Handover and Co-working with Drones. In: Companion of the 2024 ACM/IEEE In- ternational Conference on Human-Robot Interaction, pp. 302–306 (2024). DOI 10.1145/3610978. 3640590. URLhttps://dl.acm.org/doi/10.1145/3610978.3640590
-
[15]
Cauchard, J.R., Kevin, J.L.E., Zhai, Y ., Landay, J.A.: Drone & me: an exploration into natural human- drone interaction. In: Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, pp. 361–365 (2015). DOI 10.1145/2750858.2805823. URLhttps: //dl.acm.org/doi/abs/10.1145/2750858.2805823
-
[16]
In: 2022 IEEE International Conference on Intelligent Robots and Systems, pp
Corsini, G., Jacquet, M., Das, H., Afifi, A., Sidobre, D., Franchi, A.: Nonlinear Model Predictive Control for Human-Robot Handover with Application to the Aerial Case. In: 2022 IEEE International Conference on Intelligent Robots and Systems, pp. 7597–7604 (2022). DOI 10.1109/IROS47612. 2022.9981045. URLhttps://ieeexplore.ieee.org/document/9981045
-
[17]
Cortez, W.S., Verginis, C.K., Dimarogonas, D.V .: Safe, Passive Control for Mechanical Systems with Application to Physical Human-Robot Interactions. In: 2021 IEEE International Conference on Robotics and Automation, pp. 3836–3842 (2021). DOI 10.1109/ICRA48506.2021.9561981. URL https://ieeexplore.ieee.org/document/9561981
-
[18]
Dautenhahn, K., Walters, M., Woods, S., Koay, K.L., Nehaniv, C.L., Sisbot, A., Alami, R., Simeon, T.: How may i serve you? a robot companion approaching a seated person in a helping context. 36 Giuseppe Silano 1,2⋆ et al. In: Proceedings of the 1st ACM SIGCHI/SIGART conference on Humanrobot interaction, pp. 172– 179 (2006). DOI 10.1145/1121241.1121272. UR...
-
[19]
IEEE Robotics & Automation Magazine32(2), 153–166 (2025)
Dimmig, C.A., Silano, G., McGuire, K., Gabellieri, C., H ¨onig, W., Moore, J., Kobilarov, M.: Survey of Simulators for Aerial Robots: An Overview and In-Depth Systematic Comparisons [Survey]. IEEE Robotics & Automation Magazine32(2), 153–166 (2025). DOI 10.1109/MRA.2024.3433171. URL https://ieeexplore.ieee.org/document/10665978
-
[20]
In: International Conference on Formal Modeling and Analysis of Timed Systems, pp
Donz ´e, A., Maler, O.: Robust satisfaction of temporal logic over real-valued signals. In: International Conference on Formal Modeling and Analysis of Timed Systems, pp. 92–106. Springer (2010). DOI 10.1007/978-3-642-15297-9 9. URLhttps://link.springer.com/chapter/10.1007/ 978-3-642-15297-9_9
-
[21]
International Journal on Software Tools for Technology Transfer9, 1–4 (2007)
D’Souza, D., Prabhakar, P.: On the expressiveness of MTL in the pointwise and continuous se- mantics. International Journal on Software Tools for Technology Transfer9, 1–4 (2007). DOI 10.1007/s10009-005-0214-9. URLhttps://link.springer.com/article/10.1007/ s10009-005-0214-9
- [23]
-
[24]
Theoretical Computer Science410(42), 4262–4291 (2009)
Fainekos, G.E., Pappas, G.J.: Robustness of temporal logic specifications for continuous-time signals. Theoretical Computer Science410(42), 4262–4291 (2009). DOI 10.1016/j.tcs.2009.06.021. URL https://www.sciencedirect.com/science/article/pii/S0304397509004149
-
[25]
Garrell, A., Coll, C., Alqu ´ezar, R., Sanfeliu, A.: Teaching a Drone to Accompany a Person from Demonstrations using Non-Linear ASFM. In: 2019 IEEE International Conference on Intelligent Robots and Systems, pp. 1985–1991 (2019). DOI 10.1109/IROS40897.2019.8967675. URLhttps: //ieeexplore.ieee.org/document/8967675
-
[26]
In: 2017 IEEE International Conference on Intelligent Robots and Systems, pp
Garrell, A., Garza-Elizondo, L., Villamizar, M., Herrero, F., Sanfeliu, A.: Aerial social force model: A new framework to accompany people using autonomous flying robots. In: 2017 IEEE International Conference on Intelligent Robots and Systems, pp. 7011–7017 (2017). DOI 10.1109/IROS.2017. 8206627. URLhttps://ieeexplore.ieee.org/document/8206627
-
[27]
Distributionally robust sampling-based motion planning under uncertainty
Gienger, M., Ruiken, D., Bates, T., Regaieg, M., MeiBner, M., Kober, J., Seiwald, P., Hildebrandt, A.C.: Human-Robot Cooperative Object Manipulation with Contact Changes. In: 2018 IEEE Inter- national Conference on Intelligent Robots and Systems, pp. 1354–1360 (2018). DOI 10.1109/IROS. 2018.8594140. URLhttps://ieeexplore.ieee.org/document/8594140
-
[28]
IEEE Control Systems Letters 5, 241–246
Gilpin, Y ., Kurtz, V ., Lin, H.: A Smooth Robustness Measure of Signal Temporal Logic for Symbolic Control. IEEE Control Systems Letters5(1), 241–246 (2021). DOI 10.1109/LCSYS.2020.3001875. URLhttps://ieeexplore.ieee.org/document/9114883
-
[29]
Haddadin, S., Suppa, M., Fuchs, S., Bodenm ¨uller, T., Albu-Sch¨affer, A., Hirzinger, G.: Towards the robotic co-worker. In: C. Pradalier, R. Siegwart, G. Hirzinger (eds.) Robotics Research, pp. 261–282. Springer Berlin Heidelberg (2011). DOI 10.1007/978-3-642-19457-3 16. URLhttps://link. springer.com/chapter/10.1007/978-3-642-19457-3_16
-
[30]
The International Journal of Robotics Research40(8-9), 1015–1044 (2021)
Hamandi, M., Usai, F., Sabl ´e, Q., Staub, N., Tognon, M., Franchi, A.: Design of multirotor aerial vehi- cles: A taxonomy based on input allocation. The International Journal of Robotics Research40(8-9), 1015–1044 (2021). DOI 10.1177/02783649211025998. URLhttps://journals.sagepub. com/doi/full/10.1177/02783649211025998
-
[31]
Herdel, V ., Lee, J.Y ., Cauchard, J.R.: Above and Beyond: A Scoping Review of Domains and Ap- plications for Human-Drone Interaction. pp. 1–22 (2022). DOI 10.1145/3491102.3501881. URL https://dl.acm.org/doi/10.1145/3491102.3501881
-
[32]
IEEE Robotics and Automation Letters6(4), 7580–7587 (2021)
Kratky, V ., Alcantara, A., Capitan, J., Stepan, P., Saska, M., Ollero, A.: Autonomous Aerial Film- ing With Distributed Lighting by a Team of Unmanned Aerial Vehicles. IEEE Robotics and Automation Letters6(4), 7580–7587 (2021). DOI 10.1109/LRA.2021.3098811. URLhttps: //ieeexplore.ieee.org/document/9495218
-
[33]
Robotics and Autonomous Systems61(12), 1726–1743 (2013)
Kruse, T., Pandey, A.K., Alami, R., Kirsch, A.: Human-aware robot navigation: A survey. Robotics and Autonomous Systems61(12), 1726–1743 (2013). DOI 10.1016/j.robot.2013.05.007. URL https://www.sciencedirect.com/science/article/pii/S0921889013001048 Title Suppressed Due to Excessive Length 37
-
[34]
Kshirsagar, A., Kress-Gazit, H., Hoffman, G.: Specifying and Synthesizing Human-Robot Han- dovers. In: 2019 IEEE International Conference on Intelligent Robots and Systems, pp. 5930–5936 (2019). DOI 10.1109/IROS40897.2019.8967709. URLhttps://ieeexplore.ieee.org/ document/8967709
-
[35]
Li, W., Sadigh, D., Sastry, S.S., Seshia, S.A.: Synthesis for human-in-the-loop control systems. In: International Conference on Tools and Algorithms for the Construction and Analysis of Systems, pp. 470–484 (2014). DOI 10.1007/978-3-642-54862-8 40. URLhttps://link.springer.com/ chapter/10.1007/978-3-642-54862-8_40
-
[36]
IEEE Communications Magazine63(5), 94–100 (2025)
Licea, D.B., Silano, G., Hammouti, H.E., Ghogho, M., Saska, M.: Reshaping UA V-Enabled Commu- nications with Omnidirectional Multi-Rotor Aerial Vehicles. IEEE Communications Magazine63(5), 94–100 (2025). DOI 10.1109/MCOM.001.2400421. URLhttps://ieeexplore.ieee.org/ document/10829762
-
[38]
ACM Transactions on Embedded Computing Systems22(3), 1–31 (2023)
Lindemann, L., Jiang, L., Matni, N., Pappas, G.J.: Risk of Stochastic Systems for Temporal Logic Specifications. ACM Transactions on Embedded Computing Systems22(3), 1–31 (2023). DOI 10.1145/3580490. URLhttps://dl.acm.org/doi/full/10.1145/3580490
-
[39]
Lindemann, L., Matni, N., Pappas, G.J.: STL Robustness Risk over Discrete-Time Stochastic Pro- cesses. In: 60th IEEE Conference on Decision and Control, pp. 1329–1335 (2021). DOI 10.1109/ CDC45484.2021.9683305. URLhttps://ieeexplore.ieee.org/document/9683305
-
[40]
Lindemann, L., Rodionova, A., Pappas, G.J.: Temporal Robustness of Stochastic Signals. In: Pro- ceedings of the 25th ACM International Conference on Hybrid Systems: Computation and Control, pp. 1–11 (2022). DOI 10.1145/3501710.3519504. URLhttps://dl.acm.org/doi/abs/10. 1145/3501710.3519504
-
[41]
The International Journal of Robotics Research37(11), 1341–1358 (2018)
Loianno, G., Mulgaonkar, Y ., Brunner, C., Ahuja, D., Ramanandan, A., Chari, M., Diaz, S., Ku- mar, V .: Autonomous flight and cooperative control for reconstruction using aerial robots pow- ered by smartphones. The International Journal of Robotics Research37(11), 1341–1358 (2018). DOI 10.1177/0278364918774136. URLhttps://journals.sagepub.com/doi/abs/10....
-
[42]
Majumdar, A., Pavone, M.: How should a robot assess risk? Towards an axiomatic theory of risk in robotics. Robotics Research pp. 75–84 (2020). DOI 10.1007/978-3-030-28619-4 10. URLhttps: //link.springer.com/chapter/10.1007/978-3-030-28619-4_10
-
[43]
In: Formal Tech- niques, Modelling and Analysis of Timed and Fault-Tolerant Systems, pp
Maler, O., Nickovic, D.: Monitoring temporal properties of continuous signals. In: Formal Tech- niques, Modelling and Analysis of Timed and Fault-Tolerant Systems, pp. 152–166. Springer, Berlin, Heidelberg (2004). DOI 10.1007/978-3-540-30206-3 12. URLhttps://link.springer. com/chapter/10.1007/978-3-540-30206-3_12
-
[44]
In: IEEE International Conference on Robotics and Automation, pp
Mallet, A., Pasteur, C., Herrb, M., Lemaignan, S., Ingrand, F.: GenoM3: Building middleware- independent robotic components. In: IEEE International Conference on Robotics and Automation, pp. 4627–4632 (2010). DOI 10.1109/ROBOT.2010.5509539. URLhttps://ieeexplore.ieee. org/document/5509539
-
[45]
ACM Transactions on Graphics36(4), 1–10 (2017)
Nageli, T., Meier, L., Domahidi, A., Alonso-Mora, J., Hilliges, O.: Real-time planning for automated multi-view drone cinematography. ACM Transactions on Graphics36(4), 1–10 (2017). DOI 10.1145/ 3072959.3073712. URLhttps://dl.acm.org/doi/10.1145/3072959.3073712
-
[47]
IEEE Transactions on Robotics37(6), 1855–1873 (2021)
Ortenzi, V ., Cosgun, A., Pardi, T., Chan, W.P., Croft, E., Kuli ´c, D.: Object Handovers: A Review for Robotics. IEEE Transactions on Robotics37(6), 1855–1873 (2021). DOI 10.1109/TRO.2021. 3075365. URLhttps://ieeexplore.ieee.org/document/9444288
-
[48]
In: 2017 IEEE Conference on Control Technology and Applications, pp
Pant, Y .V ., Abbas, H., Mangharam, R.: Smooth operator: Control using the smooth robustness of temporal logic. In: 2017 IEEE Conference on Control Technology and Applications, pp. 1235– 1240 (2017). DOI 10.1109/CCTA.2017.8062628. URLhttps://ieeexplore.ieee.org/ document/8062628
-
[49]
In: 2017 IEEE 17th International Conference on Humanoid Robotics, pp
Peternel, L., Kim, W., Babi ˇc, J., Ajoudani, A.: Towards ergonomic control of human-robot co- manipulation and handover. In: 2017 IEEE 17th International Conference on Humanoid Robotics, pp. 55–60 (2017). DOI 10.1109/HUMANOIDS.2017.8239537. URLhttps://ieeexplore. ieee.org/document/8239537 38 Giuseppe Silano 1,2⋆ et al
-
[50]
IEEE Robotics and Automation Letters6(4), 7596–7603 (2021)
Petracek, P., Kratky, V ., Petrlik, M., Baca, T., Kratochvil, R., Saska, M.: Large-Scale Exploration of Cave Environments by Unmanned Aerial Vehicles. IEEE Robotics and Automation Letters6(4), 7596–7603 (2021). DOI 10.1109/LRA.2021.3098304. URLhttps://ieeexplore.ieee. org/document/9492802
-
[51]
In: 53rd IEEE Conference on Decision and Control, pp
Raman, V ., Donz ´e, A., Maasoumy, M., Murray, R.M., Sangiovanni-Vincentelli, A., Seshia, S.A.: Model predictive control with signal temporal logic specifications. In: 53rd IEEE Conference on Decision and Control, pp. 81–87 (2014). DOI 10.1109/CDC.2014.7039363. URLhttps: //ieeexplore.ieee.org/document/7039363
-
[52]
International Journal of Social Robotics7, 137–153 (2015)
Rios-Martinez, J., Spalanzani, A., Laugier, C.: From proxemics theory to socially-aware nav- igation: A survey. International Journal of Social Robotics7, 137–153 (2015). DOI 10.1007/s12369-014-0251-1. URLhttps://link.springer.com/article/10.1007/ s12369-014-0251-1
-
[53]
Robotics and Autonomous Systems151, 1–22 (2022)
Rubagotti, M., Tusseyeva, I., Baltabayeva, S., Summers, D., Sandygulova, A.: Perceived safety in physical human–robot interaction — A survey. Robotics and Autonomous Systems151, 1–22 (2022). DOI 10.1016/j.robot.2022.104047. URLhttps://www.sciencedirect.com/science/ article/pii/S0921889022000173
-
[54]
A survey on tensor techniques and applications in machine learning
Shakhatreh, H., Sawalmeh, A.H., Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I., Othman, N.S., Khreishah, A., Guizani, M.: Unmanned Aerial Vehicles (UA Vs): A Survey on Civil Applications and Key Research Challenges. IEEE Access7, 48572–48634 (2019). DOI 10.1109/ACCESS.2019. 2909530. URLhttps://ieeexplore.ieee.org/document/8682048
-
[55]
In: 2023 International Conference on Unmanned Aircraft Systems, pp
Silano, G., Afifi, A., Saska, M., Franchi, A.: A Signal Temporal Logic Planner for Ergonomic Hu- man–Robot Collaboration. In: 2023 International Conference on Unmanned Aircraft Systems, pp. 328–335 (2023). DOI 10.1109/ICUAS57906.2023.10156559. URLhttps://ieeexplore. ieee.org/document/10156559
-
[56]
IEEE Robotics and Automation Let- ters6(2), 4169–4176 (2021)
Silano, G., Baca, T., Penicka, R., Liuzza, D., Saska, M.: Power Line Inspection Tasks With Multi- Aerial Robot Systems Via Signal Temporal Logic Specifications. IEEE Robotics and Automation Let- ters6(2), 4169–4176 (2021). DOI 10.1109/LRA.2021.3068114. URLhttps://ieeexplore. ieee.org/document/9384182
-
[57]
NeuroImage124, 1155–1167 (2016) https://doi.org/10.1016/j
Silano, G., Cabellero, A., Liuzza, D., Iannelli, L., Bogdan, S., Saska, M.: A Signal Temporal Logic Approach for Task-Based Coordination of Multi-Aerial Systems: a Wind Turbine Inspec- tion Case Study. Robotics and Autonomous Systems186(4), 1–16 (2025). DOI 10.1016/j. robot.2024.104905. URLhttps://www.sciencedirect.com/science/article/pii/ S0921889024002896
work page doi:10.1016/j 2025
-
[58]
In: 2019 IEEE International Conference on Systems, Man and Cy- bernetics, pp
Silano, G., Oppido, P., Iannelli, L.: Software-in-the-loop simulation for improving flight control sys- tem design: a quadrotor case study. In: 2019 IEEE International Conference on Systems, Man and Cy- bernetics, pp. 466–471 (2019). DOI 10.1109/SMC.2019.8914154. URLhttps://ieeexplore. ieee.org/document/8914154
-
[59]
IEEE Transactions on Robotics 28(5), 1045–1057 (2012)
Sisbot, E.A., Alami, R.: A Human-Aware Manipulation Planner. IEEE Transactions on Robotics 28(5), 1045–1057 (2012). DOI 10.1109/TRO.2012.2196303. URLhttps://ieeexplore. ieee.org/document/6197743
-
[60]
In: 2007 IEEE International Conference on Intelligent Robots and Systems, pp
Sisbot, E.A., Marin, L.F., Alami, R.: Spatial reasoning for human robot interaction. In: 2007 IEEE International Conference on Intelligent Robots and Systems, pp. 2281–2287 (2007). DOI 10.1109/ IROS.2007.4399486. URLhttps://ieeexplore.ieee.org/document/4399486
-
[61]
IEEE Transactions on Robotics23(5), 874–883 (2007)
Sisbot, E.A., Marin-Urias, L.F., Alami, R., Simeon, T.: A Human Aware Mobile Robot Motion Plan- ner. IEEE Transactions on Robotics23(5), 874–883 (2007). DOI 10.1109/TRO.2007.904911. URL https://ieeexplore.ieee.org/document/4339546
-
[62]
IEEE Robotics & Automation Magazine25(4), 66–75 (2018)
Staub, N., Mohammadi, M., Bicego, D., Delamare, Q., Yang, H., Prattichizzo, D., Robuffo Gior- dano, P., Lee, D., Franchi, A.: The Tele-MAGMaS: An Aerial-Ground Comanipulator System. IEEE Robotics & Automation Magazine25(4), 66–75 (2018). DOI 10.1109/MRA.2018.2871344. URL https://ieeexplore.ieee.org/abstract/document/8511046
-
[63]
IEEE Transactions on Robotics37(3), 723–734 (2021)
Tognon, M., Alami, R., Siciliano, B.: Physical Human-Robot Interaction With a Tethered Aerial Ve- hicle: Application to a Force-Based Human Guiding Problem. IEEE Transactions on Robotics37(3), 723–734 (2021). DOI 10.1109/TRO.2020.3038700. URLhttps://ieeexplore.ieee.org/ document/9353246
-
[64]
IEEE Robotics and Automation Letters4(2), 1846– 1851 (2019)
Tognon, M., Ch ´avez, H.A.T., Gasparin, E., Sabl ´e, Q., Bicego, D., Mallet, A., Lany, M., Santi, G., Revaz, B., Cort´es, J., Franchi, A.: A Truly-Redundant Aerial Manipulator System With Application to Push-and-Slide Inspection in Industrial Plants. IEEE Robotics and Automation Letters4(2), 1846– 1851 (2019). DOI 10.1109/LRA.2019.2895880. URLhttps://ieee...
-
[65]
Truc, J., Singamaneni, P.T., Sidobre, D., Ivaldi, S., Alami, R.: KHAOS: a Kinematic Human Aware Optimization-based System for Reactive Planning of Flying-Coworker. In: 2022 International Confer- ence on Robotics and Automation, pp. 4764–4770 (2022). DOI 10.1109/ICRA46639.2022.9811803. URLhttps://ieeexplore.ieee.org/document/9811803
-
[66]
The International Jour- nal of Robotics Research39(1), 73–99 (2020)
Webster, M., Western, D., Araiza-Illan, D., Dixon, C., Eder, K., Fisher, M., Pipe, A.G.: A cor- roborative approach to verification and validation of human–robot teams. The International Jour- nal of Robotics Research39(1), 73–99 (2020). DOI 10.1177/027836491988333. URLhttps: //journals.sagepub.com/doi/full/10.1177/0278364919883338
-
[67]
In: 2019 14th IEEE International Conference on Human-Robot Interaction, pp
Wojciechowska, A., Frey, J., Sass, S., Shafir, R., Cauchard, J.R.: Collocated Human-Drone Inter- action: Methodology and Approach Strategy. In: 2019 14th IEEE International Conference on Human-Robot Interaction, pp. 172–181 (2019). DOI 10.1109/HRI.2019.8673127. URLhttps: //ieeexplore.ieee.org/document/8673127
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.