Follow-Bench: A Unified Motion Planning Benchmark for Socially-Aware Robot Person Following
Pith reviewed 2026-05-18 17:17 UTC · model grok-4.3
The pith
Follow-Bench introduces a unified simulator and evaluation protocol that measures how eight robot person-following planners balance safety and comfort across varied target paths, crowds, and layouts.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
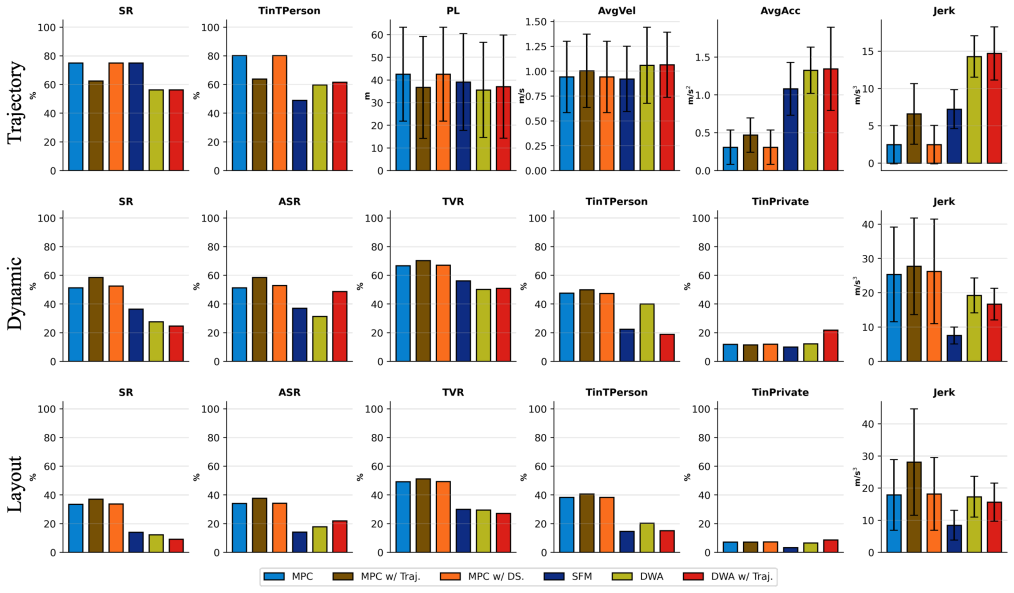
Follow-Bench supplies a common simulation environment containing multiple target trajectory patterns, crowd dynamics, and environmental layouts; eight existing motion planners are re-implemented with explicit safety and comfort terms; quantitative simulation and real-world experiments then rank the planners and expose the safety-comfort trade-offs that arise in socially aware person following.
What carries the argument
Follow-Bench, a unified simulation benchmark that generates varied person trajectories, crowd interactions, and scene layouts to score motion planners on combined safety and comfort metrics.
If this is right
- Planners can now be compared directly on identical test cases rather than on ad-hoc scenarios chosen by each paper.
- The benchmark supplies concrete quantitative evidence of how safety and comfort objectives conflict in existing methods.
- Real-robot validation on a differential-drive platform reveals deployment issues that simulation alone misses.
- Open challenges identified in the experiments point to specific directions for improving social navigation algorithms.
Where Pith is reading between the lines
- Widespread adoption of the benchmark could push future planners toward joint optimization of safety and comfort instead of sequential or weighted trade-offs.
- The same scenario-generation approach could be reused for related tasks such as robot guiding or multi-person following.
- Improved crowd models or domain randomization in simulation would be a direct next step to close the sim-to-real gap observed here.
Load-bearing premise
The simulated scenarios and the re-implementations of the eight planners reproduce the safety and comfort behaviors that would appear with real humans in physical spaces.
What would settle it
Running the two top-performing planners from the benchmark in a new real-world setting with denser, more unpredictable crowds and finding that their safety or comfort rankings reverse compared with the simulation results.
Figures













read the original abstract
Robot person following (RPF) -- mobile robots that follow and assist a specific person -- has emerging applications in personal assistance, security patrols, eldercare, and logistics. To be effective, such robots must follow the target while ensuring safety and comfort for both the target and surrounding people. In this work, we present the first comprehensive study of RPF, which (i) surveys representative scenarios, motion-planning methods, and evaluation metrics with a focus on safety and comfort; (ii) introduces Follow-Bench, a unified benchmark simulating diverse scenarios, including various target trajectory patterns, crowd dynamics, and environmental layouts; and (iii) re-implements eight representative RPF planners, ensuring that both safety and comfort are systematically considered. Moreover, we evaluate the two best-performing planners from our benchmark on a differential-drive robot to provide insights into real-world deployment of RPF planners. Extensive simulation and real-world experiments provide quantitative study of the safety-comfort trade-offs of existing planners, while revealing open challenges and future research directions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to deliver the first comprehensive study of robot person following (RPF) by surveying representative scenarios, motion-planning methods, and evaluation metrics with a focus on safety and comfort; introducing Follow-Bench as a unified benchmark that simulates diverse target trajectories, crowd dynamics, and environmental layouts; re-implementing eight representative RPF planners while systematically considering safety and comfort; and conducting extensive simulation plus real-world experiments on a differential-drive robot to quantify safety-comfort trade-offs and reveal open challenges.
Significance. If the re-implementations faithfully reproduce the original planners' behaviors, the work would provide a valuable standardized benchmark and empirical comparison that quantifies safety-comfort trade-offs across methods, supporting applications in personal assistance, security, and eldercare. The unified framework, diverse simulated scenarios, and real-robot validation on two top planners are strengths that could improve reproducibility and guide future socially-aware motion planning research.
major comments (2)
- [Re-implementation of planners] Re-implementation section: The paper provides no side-by-side reproduction of the eight planners' reported performance on their original test cases, no parameter tables matching the source publications, and no ablation on hyper-parameter selection for the new benchmark. This is load-bearing for the central claim, as the quantitative safety-comfort trade-offs and planner rankings could be artifacts of implementation differences in collision avoidance, velocity scaling, or social-cost weighting rather than the original designs.
- [Experiments] Experiments section: The simulation and real-robot evaluations lack full details on exact metrics, data exclusion criteria, and statistical controls, as the abstract's description of results rests on moderate evidence without these elements to support robustness of the reported trade-offs.
minor comments (2)
- [Abstract] The abstract could more explicitly describe how the benchmark enforces systematic consideration of both safety and comfort in the planner re-implementations.
- [Results] Tables or figures comparing planner performance would benefit from clearer separation of safety versus comfort metrics and inclusion of variance or statistical significance indicators.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We address each major comment below and indicate the revisions made to strengthen the paper.
read point-by-point responses
-
Referee: [Re-implementation of planners] Re-implementation section: The paper provides no side-by-side reproduction of the eight planners' reported performance on their original test cases, no parameter tables matching the source publications, and no ablation on hyper-parameter selection for the new benchmark. This is load-bearing for the central claim, as the quantitative safety-comfort trade-offs and planner rankings could be artifacts of implementation differences in collision avoidance, velocity scaling, or social-cost weighting rather than the original designs.
Authors: We agree that greater transparency on the re-implementations is important for reproducibility. In the revised manuscript we have added a table that lists the principal parameters (e.g., collision-avoidance gains, velocity limits, social-cost weights) for each of the eight planners together with the values taken from the original publications and the values ultimately used in Follow-Bench. We have also inserted a short paragraph describing the hyper-parameter selection process and a limited sensitivity check on the most influential social-cost terms. A complete side-by-side reproduction on the exact original test environments is not feasible within the scope of this work, because those environments are not publicly standardized and our contribution centers on comparative evaluation inside a single unified benchmark; the added documentation nevertheless allows readers to assess the fidelity of our implementations. revision: partial
-
Referee: [Experiments] Experiments section: The simulation and real-robot evaluations lack full details on exact metrics, data exclusion criteria, and statistical controls, as the abstract's description of results rests on moderate evidence without these elements to support robustness of the reported trade-offs.
Authors: We concur that additional experimental detail improves the strength of the claims. The revised manuscript now contains explicit mathematical definitions of every safety and comfort metric, a clear statement of the data-exclusion rules (trials are discarded only when the robot loses the target for more than a fixed time threshold or experiences an irrecoverable collision), and statistical reporting that includes means, standard deviations across 50 independent runs per scenario, and pairwise t-tests with p-values for the observed trade-offs. These additions directly address the concern about robustness. revision: yes
Circularity Check
No significant circularity in this empirical benchmark and re-implementation study
full rationale
The paper is a survey of RPF scenarios and methods, introduces the Follow-Bench simulation environment, re-implements eight existing planners, and reports empirical results from simulation and real-robot experiments on safety-comfort trade-offs. No derivation chain, equations, or first-principles predictions exist that could reduce to their own inputs by construction. There are no self-definitional constructs, fitted parameters presented as independent predictions, or load-bearing self-citations invoking uniqueness theorems. The central claims rest on experimental comparisons rather than tautological reasoning, making the work self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard assumptions in motion planning and social navigation metrics for safety and comfort
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
re-implements six representative RPF planners... MPC-based planner, DWA-based planner, SFM-based planner
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
evaluation metrics... Avoidance Success Rate, Time Ratio in personal zone, Movement Jerk
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Person-following by autonomous robots: A categorical overview,
M. J. Islam, J. Hong, and J. Sattar, “Person-following by autonomous robots: A categorical overview,”Int. J. Robot. Res. (IJRR), vol. 38, no. 14, pp. 1581–1618, 2019
work page 2019
-
[2]
A Survey on Socially Aware Robot Navigation: Taxonomy and Future Challenges,
P. T. Singamaneni, P. Bachiller-Burgos, L. J. Manso, A. Garrell, A. Sanfeliu, A. Spalanzani, and R. Alami, “A Survey on Socially Aware Robot Navigation: Taxonomy and Future Challenges,”Int. J. Robot. Res. (IJRR), p. 02783649241230562, Feb. 2024
work page 2024
-
[3]
Toward socially aware person-following robots,
S. S. Honig, T. Oron-Gilad, H. Zaichyk, V . Sarne-Fleischmann, S. Olatunji, and Y . Edan, “Toward socially aware person-following robots,”IEEE Trans. Trans. Cogn. Dev. Syst., vol. 10, no. 4, pp. 936– 954, 2018
work page 2018
-
[4]
Human following and guidance by autonomous mobile robots: A comprehensive review,
A. Eirale, M. Martini, and M. Chiaberge, “Human following and guidance by autonomous mobile robots: A comprehensive review,” IEEE Access, 2025
work page 2025
-
[5]
Robot person following under partial occlusion,
H. Ye, J. Zhao, Y . Pan, W. Cherr, L. He, and H. Zhang, “Robot person following under partial occlusion,” inProc. IEEE Int. Conf. Robot. Autom.IEEE, 2023, pp. 7591–7597
work page 2023
-
[6]
Person re- identification for robot person following with online continual learn- ing,
H. Ye, J. Zhao, Y . Zhan, W. Chen, L. He, and H. Zhang, “Person re- identification for robot person following with online continual learn- ing,”IEEE Robot. Autom. Lett., vol. 9, no. 11, pp. 9151–9158, 2024
work page 2024
-
[7]
Uncertainty-aware non-linear model predictive control for human-following companion robot,
S. Sekiguchi, A. Yorozu, K. Kuno, M. Okada, Y . Watanabe, and M. Takahashi, “Uncertainty-aware non-linear model predictive control for human-following companion robot,” inProc. IEEE Int. Conf. Robot. Autom., 2021, pp. 8316–8322
work page 2021
-
[8]
Principles and guidelines for evaluating social robot navigation algorithms,
A. Francis, C. P ´erez-d’Arpino, C. Li, F. Xia, A. Alahi, R. Alami, A. Bera, A. Biswas, J. Biswas, R. Chandra,et al., “Principles and guidelines for evaluating social robot navigation algorithms,”ACM Trans. Hum.-Robot Interact., vol. 14, no. 2, pp. 1–65, 2025
work page 2025
-
[9]
H. Ye, Y . Zhan, W. Situ, G. Chen, J. Yu, K. Cai, and H. Zhang, “Tpt- bench: A large-scale, long-term and robot-egocentric dataset for bench- marking target person tracking,”arXiv preprint arXiv:2503.02188, 2025
-
[10]
Person following robot using selected online ada-boosting with stereo camera,
B. X. Chen, R. Sahdev, and J. K. Tsotsos, “Person following robot using selected online ada-boosting with stereo camera,” in2017 14th conference on computer and robot vision (CRV). IEEE, 2017, pp. 48–55
work page 2017
-
[11]
Uni-NaVid: A Video-based Vision-Language-Action Model for Unifying Embodied Navigation Tasks
J. Zhang, K. Wang, S. Wang, M. Li, H. Liu, S. Wei, Z. Wang, Z. Zhang, and H. Wang, “Uni-navid: A video-based vision-language- action model for unifying embodied navigation tasks,”arXiv preprint arXiv:2412.06224, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[12]
X. Puig, E. Undersander, A. Szot, M. D. Cote, T.-Y . Yang, R. Partsey, R. Desai, A. W. Clegg, M. Hlavac, S. Y . Min,et al., “Habitat 3.0: A co-habitat for humans, avatars and robots,”arXiv preprint arXiv:2310.13724, 2023
-
[13]
Adaptive Side-by-Side Social Robot Navigation to Approach and Interact with People,
E. Repiso, A. Garrell, and A. Sanfeliu, “Adaptive Side-by-Side Social Robot Navigation to Approach and Interact with People,”Int. J. Social Robot. (IJSR), vol. 12, no. 4, pp. 909–930, Aug. 2020, number: 4
work page 2020
-
[14]
Adaptive social planner to accompany people in real-life dynamic environments,
E. Repiso, A. Garrell, and A. Sanfeliu, “Adaptive social planner to accompany people in real-life dynamic environments,”Int. J. Social Robot. (IJSR), vol. 16, no. 6, pp. 1189–1221, 2024
work page 2024
-
[15]
Social force model for pedestrian dynam- ics,
D. Helbing and P. Molnar, “Social force model for pedestrian dynam- ics,”Physical review E, vol. 51, no. 5, p. 4282, 1995
work page 1995
-
[16]
Characterizing the complexity of social robot navigation scenarios,
A. Stratton, K. Hauser, and C. Mavrogiannis, “Characterizing the complexity of social robot navigation scenarios,”IEEE Robot. Autom. Lett., 2024
work page 2024
-
[17]
C. Chen, Y . Liu, S. Kreiss, and A. Alahi, “Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforcement learning,” inProc. IEEE Int. Conf. Robot. Autom.IEEE, 2019, pp. 6015–6022
work page 2019
-
[18]
Sean 2.0: Formalizing and generating social situations for robot navigation,
N. Tsoi, A. Xiang, P. Yu, S. S. Sohn, G. Schwartz, S. Ramesh, M. Hussein, A. W. Gupta, M. Kapadia, and M. V ´azquez, “Sean 2.0: Formalizing and generating social situations for robot navigation,” IEEE Robot. Autom. Lett., pp. 1–8, 2022
work page 2022
-
[19]
A system for the notation of proxemic behavior,
E. T. Hall, “A system for the notation of proxemic behavior,”American anthropologist, vol. 65, no. 5, pp. 1003–1026, 1963
work page 1963
-
[20]
An approach to socially compliant leader following for mobile robots,
M. Kuderer and W. Burgard, “An approach to socially compliant leader following for mobile robots,” inSocial Robotics, M. Beetz, B. Johnston, and M.-A. Williams, Eds. Cham: Springer International Publishing, 2014, pp. 239–248
work page 2014
-
[21]
Autonomous person pacing and following with model predictive equilibrium point control,
J. J. Park and B. Kuipers, “Autonomous person pacing and following with model predictive equilibrium point control,” inProc. IEEE Int. Conf. Robot. Autom., 2013, pp. 1060–1067
work page 2013
-
[22]
Design of Sensing System and Anticipative Behavior for Human Following of Mobile Robots,
J.-S. Hu, J.-J. Wang, and D. M. Ho, “Design of Sensing System and Anticipative Behavior for Human Following of Mobile Robots,” vol. 61, no. 4, pp. 1916–1927, Apr. 2014
work page 1916
-
[23]
Laser-based side-by-side following for human-following robots,
H. Yao, H. Dai, E. Zhao, P. Liu, and R. Zhao, “Laser-based side-by-side following for human-following robots,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst., 2021, pp. 2651–2656
work page 2021
-
[24]
Person-following controller with socially acceptable robot motion,
J. Montesdeoca, J. M. Toibero, J. Jordan, A. Zell, and R. Carelli, “Person-following controller with socially acceptable robot motion,” Robot. and Auton. Syst., vol. 153, p. 104075, 2022
work page 2022
-
[25]
Learning optimal navigation actions for foresighted robot behavior during assistance tasks,
A. Bayoumi and M. Bennewitz, “Learning optimal navigation actions for foresighted robot behavior during assistance tasks,” inProc. IEEE Int. Conf. Robot. Autom.Stockholm, Sweden: IEEE, May 2016, pp. 207–212
work page 2016
-
[26]
Adapting to frequent human direction changes in autonomous frontal following robots,
S. Leisiazar, S. R. R. Rohani, E. J. Park, A. Lim, and M. Chen, “Adapting to frequent human direction changes in autonomous frontal following robots,”IEEE Robot. Autom. Lett., 2025
work page 2025
-
[27]
Lbgp: Learning based goal planning for autonomous following in front,
P. Nikdel, R. Vaughan, and M. Chen, “Lbgp: Learning based goal planning for autonomous following in front,” inProc. IEEE Int. Conf. Robot. Autom., 2021, pp. 3140–3146
work page 2021
-
[28]
A. Eirale, M. Martini, and M. Chiaberge, “Human-centered navigation and person-following with omnidirectional robot for indoor assistance and monitoring,”Robotics, vol. 11, no. 5, p. 108, 2022
work page 2022
-
[29]
Model of Side-by-Side Walking Without the Robot Knowing the Goal,
D. Karunarathne, Y . Morales, T. Kanda, and H. Ishiguro, “Model of Side-by-Side Walking Without the Robot Knowing the Goal,”Int. J. Social Robot. (IJSR), vol. 10, no. 4, pp. 401–420, Sept. 2018, number: 4
work page 2018
-
[30]
A dual closed- loop control strategy for human-following robots respecting social space,
J. Peng, Z. Liao, Z. Su, H. Yao, Y . Zeng, and H. Dai, “A dual closed- loop control strategy for human-following robots respecting social space,” inProc. IEEE Int. Conf. Robot. Autom.IEEE, 2024, pp. 11 252–11 258
work page 2024
-
[31]
Human orientation estimation under partial observation,
J. Zhao, H. Ye, Y . Zhan, H. Luan, and H. Zhang, “Human orientation estimation under partial observation,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst.IEEE, 2024, pp. 11 544–11 551
work page 2024
-
[32]
How do people walk side-by-side? — using a computational model of human behavior for a social robot,
Y . Morales, S. Satake, R. Huq, D. Glas, T. Kanda, and N. Hagita, “How do people walk side-by-side? — using a computational model of human behavior for a social robot,” inProc. ACM/IEEE Int. Conf. Human-Robot Interact., 2012, pp. 301–308
work page 2012
-
[33]
Human- aware robot navigation by long-term movement prediction,
L. Bruckschen, K. Bungert, N. Dengler, and M. Bennewitz, “Human- aware robot navigation by long-term movement prediction,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst., 2020, pp. 11 032–11 037
work page 2020
-
[34]
Laser-based intersection- aware human following with a mobile robot in indoor environments,
J. Yuan, S. Zhang, Q. Sun, G. Liu, and J. Cai, “Laser-based intersection- aware human following with a mobile robot in indoor environments,” IEEE Trans. Syst., Man, Cybern., Syst., vol. 51, no. 1, pp. 354–369, 2018
work page 2018
-
[35]
H.-M. Gross, A. Scheidig, K. Debes, E. Einhorn, M. Eisenbach, S. Mueller, T. Schmiedel, T. Q. Trinh, C. Weinrich, T. Wengefeld, A. Bley, and C. Martin, “ROREAS: robot coach for walking and orientation training in clinical post-stroke rehabilitation—prototype implementation and evaluation in field trials,”Autonomous Robots, vol. 41, no. 3, pp. 679–698, Mar...
work page 2017
-
[36]
Time dependent plan- ning on a layered social cost map for human-aware robot navigation,
M. Kollmitz, K. Hsiao, J. Gaa, and W. Burgard, “Time dependent plan- ning on a layered social cost map for human-aware robot navigation,” inProc. Eur . Conf. Mobile Robots (ECMR), 2015, pp. 1–6
work page 2015
-
[37]
Learning model predictive controllers with real-time attention for real- world navigation,
X. Xiao, T. Zhang, K. M. Choromanski, T.-W. E. Lee, A. Francis, J. Varley, S. Tu, S. Singh, P. Xu, F. Xia, S. M. Persson, D. Kalash- nikov, L. Takayama, R. Frostig, J. Tan, C. Parada, and V . Sindhwani, “Learning model predictive controllers with real-time attention for real- world navigation,” inProc. IEEE Conf. Rob. Learn., ser. Proceedings of Machine L...
work page 2023
-
[38]
Monocular person localization under camera ego-motion,
Y . Zhan, H. Ye, and H. Zhang, “Monocular person localization under camera ego-motion,”arXiv preprint arXiv:2503.02916, 2025
-
[39]
Obstacle-avoidant leader following with a quadruped robot,
C. Scheidemann, L. Werner, V . Reijgwart, A. Cramariuc, J. Chomarat, J.-R. Chiu, R. Siegwart, and M. Hutter, “Obstacle-avoidant leader following with a quadruped robot,”arXiv preprint arXiv:2410.00572, 2024
-
[40]
Continuous real time pomcp to find-and-follow people by a humanoid service robot,
A. Goldhoorn, A. Garrell, R. Alqu ´ezar, and A. Sanfeliu, “Continuous real time pomcp to find-and-follow people by a humanoid service robot,” inIEEE Int. Conf. Humanoid Robots. IEEE, 2014, pp. 741– 747
work page 2014
-
[41]
L. K ¨astner, B. Fatloun, Z. Shen, D. Gawrisch, and J. Lambrecht, “Human-following and-guiding in crowded environments using seman- tic deep-reinforcement-learning for mobile service robots,” inProc. IEEE Int. Conf. Robot. Autom.IEEE, 2022, pp. 833–839
work page 2022
-
[42]
Robot comfort following based on extended social force model in dynamic environment,
M. Liu, L. Zhou, Y . Sun, and J. Liu, “Robot comfort following based on extended social force model in dynamic environment,” inProc. IEEE Int. Conf. CYBER Technol. Autom., Control, Intell. Syst. (CYBER). IEEE, 2019, pp. 30–35
work page 2019
-
[43]
On-line adaptive side-by-side human robot companion in dynamic urban environments,
E. Repiso, G. Ferrer, and A. Sanfeliu, “On-line adaptive side-by-side human robot companion in dynamic urban environments,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst.IEEE, 2017, pp. 872–877
work page 2017
-
[44]
Metrics for evaluating social conformity of crowd navigation algo- rithms,
J. Wang, W. P. Chan, P. Carreno-Medrano, A. Cosgun, and E. Croft, “Metrics for evaluating social conformity of crowd navigation algo- rithms,” inProc. IEEE Int. Conf. Adv. Robot. Social Impacts (ARSO). IEEE, 2022, pp. 1–6
work page 2022
-
[45]
G. Ferrer and A. Sanfeliu, “Proactive kinodynamic planning using the extended social force model and human motion prediction in urban environments,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst.IEEE, 2014, pp. 1730–1735
work page 2014
-
[46]
An mcts-drl based obstacle and occlusion avoidance methodology in robotic follow-ahead applications,
S. Leisiazar, E. J. Park, A. Lim, and M. Chen, “An mcts-drl based obstacle and occlusion avoidance methodology in robotic follow-ahead applications,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst.IEEE, 2023, pp. 221–228
work page 2023
-
[47]
S. Samavi, J. R. Han, F. Shkurti, and A. P. Schoellig, “Sicnav: Safe and interactive crowd navigation using model predictive control and bilevel optimization,”IEEE Trans. Robot., 2024
work page 2024
-
[48]
Rpf- search: Field-based search for robot person following in unknown dynamic environments,
H. Ye, K. Cai, Y . Zhan, B. Xia, A. Ajoudani, and H. Zhang, “Rpf- search: Field-based search for robot person following in unknown dynamic environments,”IEEE/ASME Trans. Mechatronics, pp. 1–12, 2025
work page 2025
-
[49]
Searching and tracking people with cooperative mobile robots,
A. Goldhoorn, A. Garrell, R. Alqu ´ezar, and A. Sanfeliu, “Searching and tracking people with cooperative mobile robots,”Autonomous Robots, vol. 42, no. 4, pp. 739–759, 2018
work page 2018
-
[50]
Searching and tracking people in urban environments with static and dynamic obstacles,
A. Goldhoorn, A. Garrell, R. Alqu ´ezar, and A. Sanfeliu, “Searching and tracking people in urban environments with static and dynamic obstacles,”Robot. and Auton. Syst., vol. 98, pp. 147–157, 2017
work page 2017
-
[51]
Design of personal mobility motion based on cooperative movement with a companion,
T. Kobayashi, D. Chugo, S. Yokota, S. Muramatsu, and H. Hashimoto, “Design of personal mobility motion based on cooperative movement with a companion,” inProc. IEEE Int. Conf. Cogn. Infocommun. (CogInfoCom). IEEE, 2015, pp. 165–170
work page 2015
-
[52]
Adaptive social force window planner with reinforce- ment learning,
M. Martini, N. P ´erez-Higueras, A. Ostuni, M. Chiaberge, F. Caballero, and L. Merino, “Adaptive social force window planner with reinforce- ment learning,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst.IEEE, 2024, pp. 4816–4822
work page 2024
-
[53]
K. Koide and J. Miura, “Identification of a specific person using color, height, and gait features for a person following robot,”Robot. and Auton. Syst., vol. 84, pp. 76–87, 2016
work page 2016
-
[54]
Lopf: An online lidar- only person-following framework,
X. Chen, J. Liu, J. Wu, C. Wang, and R. Song, “Lopf: An online lidar- only person-following framework,”IEEE Trans. Instrum. and Meas., vol. 71, pp. 1–13, 2022
work page 2022
-
[55]
Arena 3.0: Advancing social navigation in collaborative and highly dynamic environments,
L. K ¨astner, V . Shcherbyna, H. Zeng, T. A. Le, M. H.-K. Schreff, H. Osmaev, N. T. Tran, D. Diaz, J. Golebiowski, H. Soh,et al., “Arena 3.0: Advancing social navigation in collaborative and highly dynamic environments,”arXiv preprint arXiv:2406.00837, 2024
-
[56]
Human- aware path planning with improved virtual doppler method in highly dynamic environments,
K. Cai, W. Chen, C. Wang, S. Song, and M. Q.-H. Meng, “Human- aware path planning with improved virtual doppler method in highly dynamic environments,”IEEE Trans. Autom. Sci. Eng., vol. 20, no. 2, pp. 1304–1321, 2022
work page 2022
-
[57]
Socially aware motion planning with deep reinforcement learning,
Y . F. Chen, M. Everett, M. Liu, and J. P. How, “Socially aware motion planning with deep reinforcement learning,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst.IEEE, 2017, pp. 1343–1350
work page 2017
-
[58]
M.-L. Barnaud, N. Morgado, R. Palluel-Germain, J. Diard, and A. Spalanzani, “Proxemics models for human-aware navigation in robotics: Grounding interaction and personal space models in exper- imental data from psychology,” inProc. 3rd IROS Workshop Assist. Serv. Robot. Human Environ. (IROS Workshop), 2014
work page 2014
-
[59]
Personal space: Understanding the simplex model,
L. A. Hayduk, “Personal space: Understanding the simplex model,” Journal of Nonverbal Behavior, vol. 18, no. 3, pp. 245–260, 1994
work page 1994
-
[60]
Robot social- aware navigation framework to accompany people walking side-by- side,
G. Ferrer, A. G. Zulueta, F. H. Cotarelo, and A. Sanfeliu, “Robot social- aware navigation framework to accompany people walking side-by- side,”Autonomous Robots, vol. 41, no. 4, pp. 775–793, 2017
work page 2017
-
[61]
Planning and control in unstructured terrain,
B. P. Gerkey and K. Konolige, “Planning and control in unstructured terrain,” inProc. ICRA Workshop Path Planning on Costmaps. Cite- seer, 2008
work page 2008
-
[62]
Predicting human navigation goals based on bayesian inference and activity regions,
L. Bruckschen, K. Bungert, N. Dengler, and M. Bennewitz, “Predicting human navigation goals based on bayesian inference and activity regions,”Robot. and Auton. Syst., vol. 134, p. 103664, 2020
work page 2020
-
[63]
C. Van Dang, H. Ahn, J.-W. Kim, and S. C. Lee, “Collision-free navigation in human-following task using a cognitive robotic system on differential drive vehicles,”IEEE Trans. Trans. Cogn. Dev. Syst., vol. 15, no. 1, pp. 78–87, 2022
work page 2022
-
[64]
Con- tinuous robotic tracking of dynamic targets in complex environments based on detectability,
Z. Wang, S. Huang, M. Li, J. Ouyang, Y . Wang, and H. Chen, “Con- tinuous robotic tracking of dynamic targets in complex environments based on detectability,” inProc. IEEE Int. Conf. Robot. Autom.IEEE, 2024, pp. 16 338–16 344
work page 2024
-
[65]
Speeding up person finding using hidden markov models,
A. Bayoumi, P. Karkowski, and M. Bennewitz, “Speeding up person finding using hidden markov models,”Robot. and Auton. Syst., vol. 115, pp. 40–48, 2019
work page 2019
-
[66]
Natural person-following behavior for social robots,
R. Gockley, J. Forlizzi, and R. Simmons, “Natural person-following behavior for social robots,” inProc. ACM/IEEE Int. Conf. Human- Robot Interact., 2007, pp. 17–24
work page 2007
-
[67]
Close-range human following control on a cane-type robot with multi- camera fusion,
H. Liu, F. Wu, B. Zhong, Y . Zhao, J. Zhang, W. Niu, and M. Zhang, “Close-range human following control on a cane-type robot with multi- camera fusion,”IEEE Robot. Autom. Lett., vol. 8, no. 10, pp. 6443– 6450, 2023
work page 2023
-
[68]
A robust autonomous following method for mobile robots in dynamic environments,
D. Jin, Z. Fang, and J. Zeng, “A robust autonomous following method for mobile robots in dynamic environments,”IEEE Access, vol. 8, pp. 150 311–150 325, 2020
work page 2020
-
[69]
G. Ferrer, A. Garrell, and A. Sanfeliu, “Robot companion: A social- force based approach with human awareness-navigation in crowded environments,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst., 2013, pp. 1688–1694
work page 2013
-
[70]
J. Peng, Z. Liao, H. Yao, Z. Su, Y . Zeng, and H. Dai, “Mpc-based human-accompanying control strategy for improving the motion coor- dination between the target person and the robot,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst., 2023, pp. 7969–7975
work page 2023
-
[71]
S. Yuan, F. Gao, Y . Wang, F. Fabiani, and S. Yuan, “Path planning for lunar surface person following robot via flatness-based safe-mpc with virtual disturbances,”IEEE Trans. Aerosp. Electron. Syst., pp. 1–12, 2025
work page 2025
-
[72]
Generation of a socially aware behavior of a guide robot using reinforcement learning,
B. S. B. Dewantara and J. Miura, “Generation of a socially aware behavior of a guide robot using reinforcement learning,” inProc. IEEE Int. Electron. Symp. (IES). IEEE, 2016, pp. 105–110
work page 2016
-
[73]
Casadi: a software framework for nonlinear optimization and optimal control,
J. A. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “Casadi: a software framework for nonlinear optimization and optimal control,”Math. Program. Comput., vol. 11, no. 1, pp. 1–36, 2019
work page 2019
-
[74]
Design of sensing system and anticipative behavior for human following of mobile robots,
J.-S. Hu, J.-J. Wang, and D. M. Ho, “Design of sensing system and anticipative behavior for human following of mobile robots,” vol. 61, no. 4, pp. 1916–1927, 2013
work page 1916
-
[75]
Accompanying persons with a mobile robot using motion prediction and probabilistic roadmaps,
F. Hoeller, D. Schulz, M. Moors, and F. E. Schneider, “Accompanying persons with a mobile robot using motion prediction and probabilistic roadmaps,” inProc. IEEE/RJS Int. Conf. Intell. Robots Syst., 2007, pp. 1260–1265
work page 2007
-
[76]
R. Algabri and M.-T. Choi, “Target recovery for robust deep learning- based person following in mobile robots: Online trajectory prediction,” Applied Sciences, vol. 11, no. 9, p. 4165, 2021
work page 2021
-
[77]
Robust human following by deep bayesian trajectory prediction for home service robots,
B.-J. Lee, J. Choi, C. Baek, and B.-T. Zhang, “Robust human following by deep bayesian trajectory prediction for home service robots,” in Proc. IEEE Int. Conf. Robot. Autom., 2018, pp. 7189–7195
work page 2018
-
[78]
An Architecture for Person-Following using Active Target Search
M. Kim, M. Arduengo, N. Walker, Y . Jiang, J. W. Hart, P. Stone, and L. Sentis, “An architecture for person-following using active target search,”arXiv preprint arXiv:1809.08793, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[79]
Integrating stereo vision with a cnn tracker for a person-following robot,
B. X. Chen, R. Sahdev, and J. K. Tsotsos, “Integrating stereo vision with a cnn tracker for a person-following robot,” inInt. Conf. Comput. Vis. Syst.Springer, 2017, pp. 300–313
work page 2017
-
[80]
R. Han, S. Wang, S. Wang, Z. Zhang, Q. Zhang, Y . C. Eldar, Q. Hao, and J. Pan, “Rda: An accelerated collision free motion planner for autonomous navigation in cluttered environments,”IEEE Robot. Autom. Lett., vol. 8, no. 3, pp. 1715–1722, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.