FUNCanon: Learning Pose-Aware Action Primitives via Functional Object Canonicalization for Generalizable Robotic Manipulation
Pith reviewed 2026-05-21 22:11 UTC · model grok-4.3
The pith
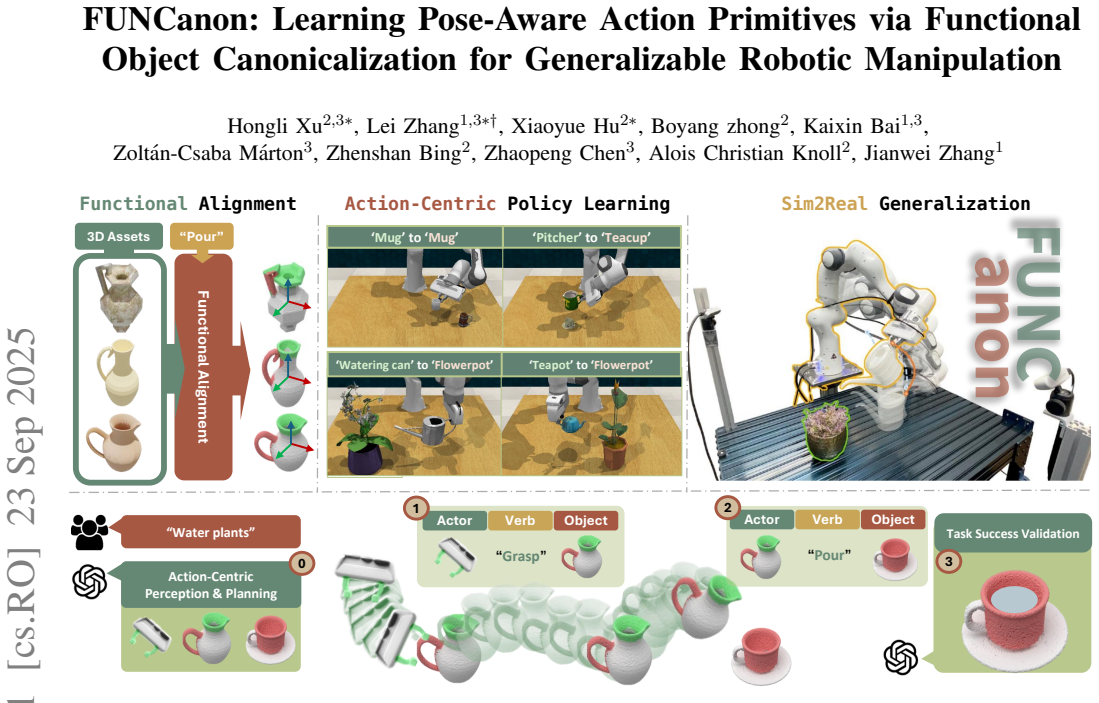
Functional object canonicalization using vision-language affordances lets imitation policies learn reusable pose-aware action primitives that generalize across object categories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
FunCanon performs functional object canonicalization to place objects from different categories into common functional frames using affordance cues extracted from vision-language models. This produces aligned training data on which an object-centric and action-centric diffusion policy, FuncDiffuser, is trained. The policy therefore respects object poses and affordances by construction, turning task-specific imitation into reusable action-primitive learning.
What carries the argument
Functional object canonicalization: the mapping of arbitrary objects into shared functional frames via affordance cues from large vision-language models, which enables automatic trajectory transfer and pose-aware policy training.
If this is right
- Category-level generalization becomes feasible because policies operate in functional rather than geometric coordinates.
- Action primitives learned on one task can be reused on other tasks that share the same verb-object pair.
- Sim-to-real transfer improves because the canonical frame removes appearance and pose differences between simulated and real objects.
- Policy learning is simplified by focusing the model on short, pose-aware action chunks instead of full task sequences.
Where Pith is reading between the lines
- The same alignment step could be applied to multi-step sequences involving several objects by composing multiple canonical frames.
- If VLM affordance errors are the main failure mode, fine-tuning the VLM on robot-specific manipulation data would be a direct next experiment.
- Extending the chunk representation to include tool or hand pose might further improve precision in contact-rich skills.
Load-bearing premise
Affordance cues extracted from large vision-language models are accurate and complete enough to produce correct functional alignments without losing task-critical details or adding errors.
What would settle it
Train two policies on the same demonstrations—one with functional canonicalization and one without—then measure success rate on a held-out object category; a large gap in favor of the canonicalized version would support the claim.
Figures








read the original abstract
General-purpose robotic skills from end-to-end demonstrations often leads to task-specific policies that fail to generalize beyond the training distribution. Therefore, we introduce FunCanon, a framework that converts long-horizon manipulation tasks into sequences of action chunks, each defined by an actor, verb, and object. These chunks focus policy learning on the actions themselves, rather than isolated tasks, enabling compositionality and reuse. To make policies pose-aware and category-general, we perform functional object canonicalization for functional alignment and automatic manipulation trajectory transfer, mapping objects into shared functional frames using affordance cues from large vision language models. An object centric and action centric diffusion policy FuncDiffuser trained on this aligned data naturally respects object affordances and poses, simplifying learning and improving generalization ability. Experiments on simulated and real-world benchmarks demonstrate category-level generalization, cross-task behavior reuse, and robust sim2real deployment, showing that functional canonicalization provides a strong inductive bias for scalable imitation learning in complex manipulation domains. Details of the demo and supplemental material are available on our project website https://sites.google.com/view/funcanon.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces FunCanon, a framework that decomposes long-horizon manipulation tasks into action chunks defined by actor, verb, and object to promote compositionality and reuse. It performs functional object canonicalization by mapping objects into shared functional frames using affordance cues extracted from large vision-language models, enabling automatic manipulation trajectory transfer across object categories. An object-centric and action-centric diffusion policy (FuncDiffuser) is then trained on the aligned data. The authors claim that this yields category-level generalization, cross-task behavior reuse, and robust sim2real transfer, with experiments on simulated and real-world benchmarks demonstrating that functional canonicalization supplies a strong inductive bias for scalable imitation learning.
Significance. If the central claims hold, the work would provide a novel inductive bias for imitation learning in robotics by leveraging functional alignment to achieve pose-aware, category-general policies that support behavior reuse without task-specific retraining. This could meaningfully advance generalizable manipulation in complex domains where end-to-end methods typically overfit to narrow distributions.
major comments (2)
- [§3.2 and Figure 3] §3.2 and Figure 3: functional canonicalization is defined by using VLM affordance cues to establish canonical frames prior to training FuncDiffuser. No quantitative bound on VLM error rate, consistency across instances, or sensitivity analysis is reported. Systematic misidentification of functional parts would introduce pose offsets that propagate directly into the diffusion policy's training distribution, undermining the claimed inductive bias for category-level generalization and cross-task reuse.
- [Abstract and experimental sections] Abstract and experimental sections: the manuscript asserts success on benchmarks for category-level generalization, cross-task reuse, and sim2real deployment, yet provides no quantitative results, baselines, ablation studies, or error analysis. This absence leaves the central empirical claim without verifiable support.
minor comments (1)
- The project website is referenced for demos and supplemental material; all quantitative results, implementation details, and evaluation protocols should be fully documented in the manuscript to support reproducibility.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review of our manuscript. We address each major comment below and have revised the paper accordingly to strengthen the presentation of our method and results.
read point-by-point responses
-
Referee: [§3.2 and Figure 3] §3.2 and Figure 3: functional canonicalization is defined by using VLM affordance cues to establish canonical frames prior to training FuncDiffuser. No quantitative bound on VLM error rate, consistency across instances, or sensitivity analysis is reported. Systematic misidentification of functional parts would introduce pose offsets that propagate directly into the diffusion policy's training distribution, undermining the claimed inductive bias for category-level generalization and cross-task reuse.
Authors: We agree that quantifying the reliability of the VLM-based affordance cues is important for validating the robustness of functional canonicalization. In the revised manuscript we have added a new analysis subsection that reports VLM affordance prediction error rates on our collected dataset, measures consistency of canonical frame estimation across multiple instances of the same object category, and includes a sensitivity study that introduces controlled perturbations to the extracted affordance points and measures the resulting effect on downstream policy success rates. These additions show that moderate VLM inaccuracies do not critically degrade the learned policies, supporting the claimed inductive bias. revision: yes
-
Referee: [Abstract and experimental sections] Abstract and experimental sections: the manuscript asserts success on benchmarks for category-level generalization, cross-task reuse, and sim2real deployment, yet provides no quantitative results, baselines, ablation studies, or error analysis. This absence leaves the central empirical claim without verifiable support.
Authors: We acknowledge that the experimental claims in the abstract and main text would benefit from more explicit quantitative support. The original manuscript contains an experimental section with success-rate tables, baseline comparisons, and sim2real results; however, to directly address the referee’s concern we have expanded this section with additional ablation tables isolating the contribution of functional canonicalization, more comprehensive baseline methods, and error analysis with standard deviations across multiple random seeds. These revisions make the empirical evidence for category-level generalization, cross-task reuse, and sim2real transfer fully verifiable. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's core derivation uses external affordance cues from large vision-language models to define functional canonical frames for object alignment and trajectory transfer, then trains a separate object-centric and action-centric diffusion policy (FuncDiffuser) on the resulting aligned data. This sequence depends on independent external components (VLMs and diffusion models) and experimental validation on sim/real benchmarks rather than any self-definitional reduction, fitted parameters renamed as predictions, or load-bearing self-citations. No equations or steps in the abstract or described method collapse to their own inputs by construction; the claimed inductive bias for generalization arises from the alignment process and policy training, which remain falsifiable against external data.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Large vision-language models can extract reliable affordance cues suitable for functional object alignment and trajectory transfer.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we perform functional object canonicalization for functional alignment and automatic manipulation trajectory transfer, mapping objects into shared functional frames using affordance cues from large vision language models
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
R* = arg min_R∈SO(3) ||R v_s - v_t||_2^2
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, p. 02783649241273668,
-
[2]
3D Diffusion Policy: Generalizable Visuomotor Policy Learning via Simple 3D Representations
Y . Ze, G. Zhang, K. Zhang, C. Hu, M. Wang, and H. Xu, “3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations,”arXiv preprint arXiv:2403.03954, 2024. 1, 2
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[3]
3D Diffuser Actor: Policy Diffusion with 3D Scene Representations
T.-W. Ke, N. Gkanatsios, and K. Fragkiadaki, “3d diffuser actor: Policy diffusion with 3d scene representations,” arXiv preprint arXiv:2402.10885, 2024. 1, 2, 6, 7
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[4]
Spot: Se (3) pose trajectory diffusion for object-centric manipulation,
C.-C. Hsu, B. Wen, J. Xu, Y . Narang, X. Wang, Y . Zhu, J. Biswas, and S. Birchfield, “Spot: Se (3) pose trajectory diffusion for object-centric manipulation,”arXiv preprint arXiv:2411.00965, 2024. 1, 2, 6, 7
-
[5]
6-pack: Category-level 6d pose tracker with anchor-based keypoints,
C. Wang, R. Mart ´ın-Mart´ın, D. Xu, J. Lv, C. Lu, L. Fei- Fei, S. Savarese, and Y . Zhu, “6-pack: Category-level 6d pose tracker with anchor-based keypoints,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 10 059–10 066. 1
work page 2020
-
[6]
Learning 3d dynamic scene representations for robot manipulation,
Z. Xu, Z. He, J. Wu, and S. Song, “Learning 3d dynamic scene representations for robot manipulation,”arXiv preprint arXiv:2011.01968, 2020. 1
-
[7]
Uad: Unsupervised affordance distillation for generalization in robotic manipulation,
Y . Tang, W. Huang, Y . Wang, C. Li, R. Yuan, R. Zhang, J. Wu, and L. Fei-Fei, “Uad: Unsupervised affordance distillation for generalization in robotic manipulation,” arXiv preprint arXiv:2506.09284, 2025. 2, 3
-
[8]
One-shot 3d object canonicalization based on geometric and semantic consistency,
L. Jin, Y . Wang, W. Chen, Q. Dai, Q. Gao, X. Qin, and B. Chen, “One-shot 3d object canonicalization based on geometric and semantic consistency,” inProceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 16 850–16 859. 2
work page 2025
-
[9]
Tooleenet: Tool affordance 6d pose estimation,
Y . Wang, L. Zhang, Y . Tu, H. Zhang, K. Bai, Z. Chen, and J. Zhang, “Tooleenet: Tool affordance 6d pose estimation,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 10 519– 10 526. 2
work page 2024
-
[10]
Deep reinforcement learning for robotic manipulation with asyn- chronous off-policy updates,
S. Gu, E. Holly, T. Lillicrap, and S. Levine, “Deep reinforcement learning for robotic manipulation with asyn- chronous off-policy updates,” in2017 IEEE international conference on robotics and automation (ICRA). IEEE, 2017, pp. 3389–3396. 2
work page 2017
-
[11]
Perceiver-actor: A multi-task transformer for robotic manipulation,
M. Shridhar, L. Manuelli, and D. Fox, “Perceiver-actor: A multi-task transformer for robotic manipulation,” in Conference on Robot Learning. PMLR, 2023, pp. 785–
work page 2023
-
[12]
Generative skill chaining: Long-horizon skill planning with diffusion models,
U. A. Mishra, S. Xue, Y . Chen, and D. Xu, “Generative skill chaining: Long-horizon skill planning with diffusion models,” inConference on Robot Learning. PMLR, 2023, pp. 2905–2925. 2
work page 2023
-
[13]
Cliport: What and where pathways for robotic manipulation,
M. Shridhar, L. Manuelli, and D. Fox, “Cliport: What and where pathways for robotic manipulation,” inConference on robot learning. PMLR, 2022, pp. 894–906. 2
work page 2022
-
[14]
Vima: Robot manipulation with multimodal prompts,
Y . Jiang, A. Gupta, Z. Zhang, G. Wang, Y . Dou, Y . Chen, L. Fei-Fei, A. Anandkumar, Y . Zhu, and L. Fan, “Vima: Robot manipulation with multimodal prompts,” 2023. 2
work page 2023
-
[15]
Neural descriptor fields: Se (3)-equivariant object representations for manipulation,
A. Simeonov, Y . Du, A. Tagliasacchi, J. B. Tenenbaum, A. Rodriguez, P. Agrawal, and V . Sitzmann, “Neural descriptor fields: Se (3)-equivariant object representations for manipulation,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 6394–
work page 2022
-
[16]
ReKep: Spatio-Temporal Reasoning of Relational Keypoint Constraints for Robotic Manipulation
W. Huang, C. Wang, Y . Li, R. Zhang, and L. Fei-Fei, “Rekep: Spatio-temporal reasoning of relational keypoint constraints for robotic manipulation,”arXiv preprint arXiv:2409.01652, 2024. 2
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[17]
H. Chu, X. Deng, Q. Lv, X. Chen, Y . Li, J. Hao, and L. Nie, “3d-affordancellm: Harnessing large language models for open-vocabulary affordance detection in 3d worlds,”arXiv preprint arXiv:2502.20041, 2025. 2
-
[18]
Grounding 3d object affordance with language instructions, visual observations and interac- tions,
H. Zhu, Q. Kong, K. Xu, X. Xia, B. Deng, J. Ye, R. Xiong, and Y . Wang, “Grounding 3d object affordance with language instructions, visual observations and interac- tions,” inProceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 17 337–17 346. 2
work page 2025
-
[19]
Affordancellm: Grounding affordance from vision language models,
S. Qian, W. Chen, M. Bai, X. Zhou, Z. Tu, and L. E. Li, “Affordancellm: Grounding affordance from vision language models,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 7587–7597. 2
work page 2024
-
[20]
Learning instruction-guided manipulation affordance via large models for embodied robotic tasks,
D. Li, C. Zhao, S. Yang, L. Ma, Y . Li, and W. Zhang, “Learning instruction-guided manipulation affordance via large models for embodied robotic tasks,” in2024 International Conference on Advanced Robotics and Mechatronics (ICARM). IEEE, 2024, pp. 662–667. 2
work page 2024
-
[21]
DINOv2: Learning Robust Visual Features without Supervision
M. Oquab, T. Darcet, T. Moutakanni, H. V o, M. Szafraniec, V . Khalidov, P. Fernandez, D. Haziza, F. Massa, A. El-Noubyet al., “Dinov2: Learning ro- bust visual features without supervision,”arXiv preprint arXiv:2304.07193, 2023. 3
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[22]
TripoSR: Fast 3D Object Reconstruction from a Single Image
D. Tochilkin, D. Pankratz, Z. Liu, Z. Huang, , A. Letts, Y . Li, D. Liang, C. Laforte, V . Jampani, and Y .-P. Cao, “Triposr: Fast 3d object reconstruction from a single image,”arXiv preprint arXiv:2403.02151, 2024. 5
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[23]
Founda- tionpose: Unified 6d pose estimation and tracking of novel objects,
B. Wen, W. Yang, J. Kautz, and S. Birchfield, “Founda- tionpose: Unified 6d pose estimation and tracking of novel objects,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 17 868–17 879. 5, 9
work page 2024
-
[24]
Rlbench: The robot learning benchmark & learning environment,
S. James, Z. Ma, D. R. Arrojo, and A. J. Davison, “Rlbench: The robot learning benchmark & learning environment,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3019–3026, 2020. 5
work page 2020
-
[25]
Objaverse: A universe of annotated 3d objects,
M. Deitke, D. Schwenk, J. Salvador, L. Weihs, O. Michel, E. VanderBilt, L. Schmidt, K. Ehsani, A. Kembhavi, and A. Farhadi, “Objaverse: A universe of annotated 3d objects,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2023, pp. 13 142–13 153. 5 APPENDIX Supplementary Materials consist of the following sections: • In...
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.