OREN: Octree Residual Network for Real-Time Euclidean Signed Distance Mapping
Pith reviewed 2026-05-18 04:23 UTC · model grok-4.3
The pith
A hybrid octree and neural residual network reconstructs non-truncated Euclidean signed distance functions in real time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
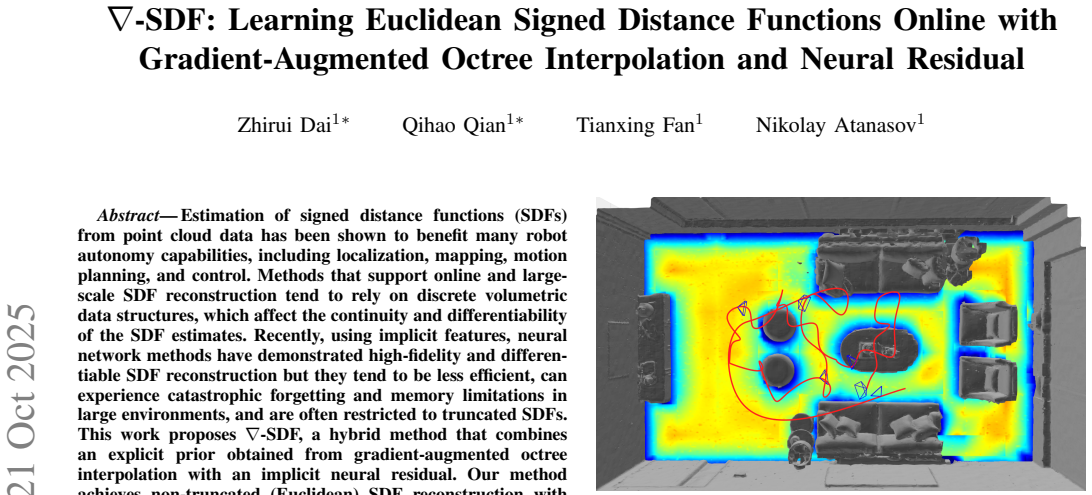
Our method achieves non-truncated (Euclidean) SDF reconstruction with computational and memory efficiency comparable to volumetric methods and differentiability and accuracy comparable to neural network methods. The approach combines an explicit prior from octree interpolation with an implicit residual from neural network regression.
What carries the argument
The octree residual network, which applies neural regression to correct an octree interpolation prior for accurate residual SDF values.
If this is right
- Outperforms the state of the art in accuracy and efficiency for SDF reconstruction.
- Provides a scalable solution for large-scale environments without catastrophic forgetting.
- Enables differentiable SDF for use in optimization-based planning and control.
- Supports real-time performance with memory usage comparable to volumetric techniques.
Where Pith is reading between the lines
- Applying the residual correction to other geometric representations could yield similar efficiency gains in related reconstruction problems.
- The method's structure suggests it could handle dynamic scenes if the octree is updated incrementally.
- Integration with gradient-based learning for control might benefit from the differentiability property demonstrated here.
Load-bearing premise
The octree interpolation supplies a sufficiently accurate prior that the neural residual can correct without introducing new errors, catastrophic forgetting, or excessive compute in large-scale environments.
What would settle it
An experiment on incrementally growing large-scale point cloud data where one measures whether memory consumption remains sub-quadratic and SDF error stays below a threshold over long sequences.
Figures




read the original abstract
Reconstructing signed distance functions (SDFs) from point cloud data benefits many robot autonomy capabilities, including localization, mapping, motion planning, and control. Methods that support online and large-scale SDF reconstruction often rely on discrete volumetric data structures, which affects the continuity and differentiability of the SDF estimates. Neural network methods have demonstrated high-fidelity differentiable SDF reconstruction but they tend to be less efficient, experience catastrophic forgetting and memory limitations in large environments, and are often restricted to truncated SDF. This work proposes OREN, a hybrid method that combines an explicit prior from octree interpolation with an implicit residual from neural network regression. Our method achieves non-truncated (Euclidean) SDF reconstruction with computational and memory efficiency comparable to volumetric methods and differentiability and accuracy comparable to neural network methods. Extensive experiments demonstrate that OREN outperforms the state of the art in terms of accuracy and efficiency, providing a scalable solution for downstream tasks in robotics and computer vision.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes OREN, a hybrid method for real-time reconstruction of non-truncated Euclidean signed distance functions (SDFs) from point clouds. It combines an explicit prior obtained via octree interpolation with an implicit residual correction learned by a neural network. The central claim is that this yields SDF estimates with volumetric-like computational and memory efficiency together with neural-like differentiability and accuracy, outperforming prior art on accuracy and efficiency metrics for downstream robotics tasks.
Significance. A working hybrid that preserves real-time performance while delivering accurate, differentiable, non-truncated Euclidean distances would be useful for large-scale online mapping, localization, and planning. The approach directly addresses the continuity/differentiability limitations of pure volumetric representations and the scalability issues of pure neural SDFs; if the residual correction remains small and local, the method could scale better than either family alone.
major comments (1)
- [Method section (hybrid construction)] The load-bearing assumption that octree interpolation supplies a prior sufficiently close to the true Euclidean SDF for a local neural residual to correct without new discontinuities or loss of real-time performance is not adequately stress-tested. In large environments, cells far from observations can exhibit interpolation distances that deviate substantially from ground-truth Euclidean values; the manuscript should quantify residual magnitude, generalization error, and compute overhead in such regions (e.g., via ablation on observation density).
minor comments (2)
- [Abstract] Abstract asserts quantitative outperformance but supplies no numerical metrics, error bars, dataset sizes, or ablation results; readers must reach the experiments section to evaluate the claims.
- [Method] Notation for the residual network input (octree cell features, query point encoding) should be defined explicitly before the first equation that uses it.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment point by point below, agreeing to strengthen the presentation of the hybrid method's assumptions with additional analysis.
read point-by-point responses
-
Referee: The load-bearing assumption that octree interpolation supplies a prior sufficiently close to the true Euclidean SDF for a local neural residual to correct without new discontinuities or loss of real-time performance is not adequately stress-tested. In large environments, cells far from observations can exhibit interpolation distances that deviate substantially from ground-truth Euclidean values; the manuscript should quantify residual magnitude, generalization error, and compute overhead in such regions (e.g., via ablation on observation density).
Authors: We agree that explicit quantification of the residual correction in sparsely observed regions would strengthen the manuscript. Our current experiments on large-scale datasets (e.g., KITTI sequences) show that the neural residual improves accuracy over pure octree interpolation while preserving real-time performance, and the residual remains small and local by design. However, we acknowledge that dedicated ablations on observation density and residual statistics in far-from-observation cells were not reported. We will add this analysis in a revised version, including: (i) residual magnitude distributions (mean, max, and histograms) for varying observation densities; (ii) generalization error of the residual network in low-density regions; and (iii) timing breakdowns to confirm no loss of real-time capability. These results will be presented in the Experiments section with corresponding visualizations. revision: yes
Circularity Check
No circularity: hybrid octree-NN construction is structurally independent
full rationale
The paper presents OREN as an explicit integration of octree interpolation (providing a prior) with a separate neural residual regressor. No equation or claim reduces a derived quantity to a fitted parameter or self-referential definition; the non-truncated Euclidean SDF is obtained by adding the two components rather than by construction from one of them. No load-bearing self-citation or uniqueness theorem is invoked to justify the architecture, and the method is validated against external benchmarks rather than internal fits. The derivation chain therefore remains self-contained.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
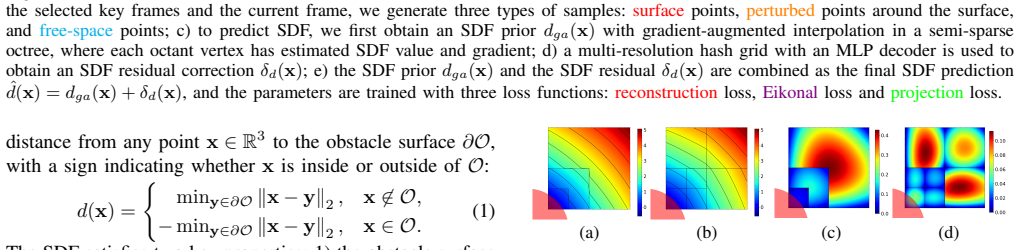
hybrid method that combines an explicit prior obtained from gradient-augmented octree interpolation with an implicit neural residual
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
iSDF: Real-Time Neural Signed Distance Fields for Robot Perception,
J. Ortiz, A. Clegg, J. Dong, E. Sucar, D. Novotny, M. Zollhoefer, and M. Mukadam, “iSDF: Real-Time Neural Signed Distance Fields for Robot Perception,” inRobotics: Science and Systems (RSS), 2022
work page 2022
-
[2]
Y . Pan, X. Zhong, L. Wiesmann, T. Posewsky, J. Behley, and C. Stach- niss, “PIN-SLAM: LiDAR SLAM Using a Point-Based Implicit Neural Representation for Achieving Global Map Consistency,”IEEE Transactions on Robotics, 2024
work page 2024
-
[3]
Y . Tian, H. Cao, S. Kim, and N. Atanasov, “MISO: Multiresolution Submap Optimization for Efficient Globally Consistent Neural Implicit Reconstruction,” inRobotics: Science and Systems (RSS), 2025
work page 2025
-
[4]
Diffusion-SDF: Conditional Gen- erative Modeling of Signed Distance Functions,
G. Chou, Y . Bahat, and F. Heide, “Diffusion-SDF: Conditional Gen- erative Modeling of Signed Distance Functions,” inICCV, 2023
work page 2023
-
[5]
Differentiable Signed Distance Function Rendering,
D. Vicini, S. Speierer, and W. Jakob, “Differentiable Signed Distance Function Rendering,”ACM Trans. Graph., 2022
work page 2022
-
[6]
NeuS2: Fast Learning of Neural Implicit Surfaces for Multi- view Reconstruction,
Y . Wang, Q. Han, M. Habermann, K. Daniilidis, C. Theobalt, and L. Liu, “NeuS2: Fast Learning of Neural Implicit Surfaces for Multi- view Reconstruction,” inICCV, 2023
work page 2023
-
[7]
V oxblox: Incremental 3D Euclidean Signed Distance Fields for On- board MA V planning,
H. Oleynikova, Z. Taylor, M. Fehr, R. Siegwart, and J. Nieto, “V oxblox: Incremental 3D Euclidean Signed Distance Fields for On- board MA V planning,” inIROS, 2017
work page 2017
-
[8]
Sensor- based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments,
K. Long, Y . Yi, Z. Dai, S. Herbert, J. Cort´es, and N. Atanasov, “Sensor- based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments,”The International Journal of Robotics Research, 2025
work page 2025
-
[9]
Regularized Deep Signed Distance Fields for Reactive Motion Gen- eration,
P. Liu, K. Zhang, D. Tateo, S. Jauhri, J. Peters, and G. Chalvatzaki, “Regularized Deep Signed Distance Fields for Reactive Motion Gen- eration,” inIROS, 2022
work page 2022
-
[10]
Configuration Space Distance Fields for Manipulation Planning,
Y . Li, X. Chi, A. Razmjoo, and S. Calinon, “Configuration Space Distance Fields for Manipulation Planning,” 2024
work page 2024
-
[11]
Representing Robot Geometry as Distance Fields: Applications to Whole-body Manipula- tion,
Y . Li, Y . Zhang, A. Razmjoo, and S. Calinon, “Representing Robot Geometry as Distance Fields: Applications to Whole-body Manipula- tion,” inICRA, 2024
work page 2024
-
[12]
KinectFusion: Real-time Dense Surface Mapping and Tracking,
R. A. Newcombe, S. Izadi, O. Hilliges, D. Molyneaux, D. Kim, A. J. Davison, P. Kohi, J. Shotton, S. Hodges, and A. Fitzgibbon, “KinectFusion: Real-time Dense Surface Mapping and Tracking,” in IEEE International Symposium on Mixed and Augmented Reality, 2011
work page 2011
-
[13]
Online Continuous Mapping using Gaussian Process Implicit Surfaces,
B. Lee, C. Zhang, Z. Huang, and D. D. Lee, “Online Continuous Mapping using Gaussian Process Implicit Surfaces,” inICRA, 2019
work page 2019
-
[14]
VDB-GPDF: Online Gaussian Process Distance Field with VDB Structure,
L. Wu, C. Le Gentil, and T. Vidal-Calleja, “VDB-GPDF: Online Gaussian Process Distance Field with VDB Structure,”IEEE Robotics and Automation Letters, 2025
work page 2025
-
[15]
DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation,
J. J. Park, P. Florence, J. Straub, R. Newcombe, and S. Lovegrove, “DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation,” inCVPR, 2019
work page 2019
-
[16]
NeuS: Learning Neural Implicit Surfaces by V olume Rendering for Multi-view Reconstruction,
P. Wang, L. Liu, Y . Liu, C. Theobalt, T. Komura, and W. Wang, “NeuS: Learning Neural Implicit Surfaces by V olume Rendering for Multi-view Reconstruction,” inConference on Neural Information Processing Systems, 2021
work page 2021
-
[17]
H2-Mapping: Real-time Dense Mapping Using Hierarchical Hybrid Representation,
C. Jiang, H. Zhang, P. Liu, Z. Yu, H. Cheng, B. Zhou, and S. Shen, “H2-Mapping: Real-time Dense Mapping Using Hierarchical Hybrid Representation,”IEEE Robotics and Automation Letters, 2023
work page 2023
-
[18]
HIO-SDF: Hierarchical Incremental Online Signed Distance Fields,
V . Vasilopoulos, S. Garg, J. Huh, B. Lee, and V . Isler, “HIO-SDF: Hierarchical Incremental Online Signed Distance Fields,” inICRA, 2024
work page 2024
-
[19]
V oxfield: Non-Projective Signed Distance Fields for Online Planning and 3D Reconstruction,
Y . Pan, Y . Kompis, L. Bartolomei, R. Mascaro, C. Stachniss, and M. Chli, “V oxfield: Non-Projective Signed Distance Fields for Online Planning and 3D Reconstruction,” inIROS, 2022
work page 2022
-
[20]
A V olumetric Method for Building Com- plex Models from Range Images,
B. Curless and M. Levoy, “A V olumetric Method for Building Com- plex Models from Range Images,” inSIGGRAPH, 1996
work page 1996
-
[21]
Very High Frame Rate V olumetric Integration of Depth Images on Mobile Devices,
O. K ¨ahler, V . Adrian Prisacariu, C. Yuheng Ren, X. Sun, P. Torr, and D. Murray, “Very High Frame Rate V olumetric Integration of Depth Images on Mobile Devices,”IEEE Transactions on Visualization and Computer Graphics, 2015
work page 2015
-
[22]
FIESTA: Fast Incremental Euclidean Distance Fields for Online Motion Planning of Aerial Robots,
L. Han, F. Gao, B. Zhou, and S. Shen, “FIESTA: Fast Incremental Euclidean Distance Fields for Online Motion Planning of Aerial Robots,” inIROS, 2019
work page 2019
-
[23]
nvblox: GPU-Accelerated Incremental Signed Distance Field Mapping,
A. Millane, H. Oleynikova, E. Wirbel, R. Steiner, V . Ramasamy, D. Tingdahl, and R. Siegwart, “nvblox: GPU-Accelerated Incremental Signed Distance Field Mapping,” inICRA, 2024
work page 2024
-
[24]
Faithful Euclidean Distance Field From Log-Gaussian Process Implicit Surfaces,
L. Wu, K. M. B. Lee, L. Liu, and T. Vidal-Calleja, “Faithful Euclidean Distance Field From Log-Gaussian Process Implicit Surfaces,”IEEE Robotics and Automation Letters, 2021
work page 2021
-
[25]
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoor- thi, and R. Ng, “NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis,” inECCV, 2020
work page 2020
-
[26]
Implicit Geometric Regularization for Learning Shapes,
A. Gropp, L. Yariv, N. Haim, M. Atzmon, and Y . Lipman, “Implicit Geometric Regularization for Learning Shapes,” inInternational Con- ference on Machine Learning, 2020
work page 2020
-
[27]
Neural Geometric Level of Detail: Real-time Rendering with Implicit 3D Shapes,
T. Takikawa, J. Litalien, K. Yin, K. Kreis, C. Loop, D. Nowrouzezahrai, A. Jacobson, M. McGuire, and S. Fidler, “Neural Geometric Level of Detail: Real-time Rendering with Implicit 3D Shapes,” inCVPR, 2021
work page 2021
-
[28]
HotSpot: Signed Distance Function Optimization with an Asymptotically Suf- ficient Condition,
Z. Wang, C. Wang, T. Yoshino, S. Tao, Z. Fu, and T.-M. Li, “HotSpot: Signed Distance Function Optimization with an Asymptotically Suf- ficient Condition,” inCVPR, 2025
work page 2025
-
[29]
Instant Neural Graphics Primitives with a Multiresolution Hash Encoding,
T. M ¨uller, A. Evans, C. Schied, and A. Keller, “Instant Neural Graphics Primitives with a Multiresolution Hash Encoding,”ACM Trans. Graph., 2022
work page 2022
-
[30]
The Replica Dataset: A Digital Replica of Indoor Spaces
J. Straub, T. Whelan, L. Ma, Y . Chen, E. Wijmans, S. Green, J. J. Engel, R. Mur-Artal, C. Ren, S. Vermaet al., “The Replica Dataset: A Digital Replica of Indoor Spaces,”arXiv preprint arXiv:1906.05797, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.