Temporal Reach-Avoid-Stay Control for Differential Drive Systems via Spatiotemporal Tubes
Pith reviewed 2026-05-17 01:43 UTC · model grok-4.3
The pith
Circular spatiotemporal tubes enable robust satisfaction of temporal reach-avoid-stay specifications for differential-drive robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors establish that a sampling-based algorithm can construct circular spatiotemporal tubes meeting timing and safety constraints with formal guarantees, and that a closed-form control law can be analytically designed to ensure the differential-drive robot remains confined within the tube despite uncertainties and disturbances, thereby satisfying the T-RAS specifications.
What carries the argument
Circular spatiotemporal tubes with smoothly time-varying centers and radii that act as dynamic safe corridors, synthesized by sampling and enforced via analytical closed-form control.
If this is right
- The sampling-based synthesis provides formal guarantees on tube feasibility.
- The closed-form control is computationally efficient for real-time use.
- The framework is robust to dynamic uncertainties and external disturbances.
- Simulations show better performance than state-of-the-art methods in robustness and efficiency.
Where Pith is reading between the lines
- This approach may generalize to other nonholonomic robot models beyond differential drive.
- The tube concept could be combined with higher-level planners for multi-robot coordination.
- Testing in physical hardware would reveal practical limits of the robustness claims.
Load-bearing premise
A feasible spatiotemporal tube satisfying the timing and safety constraints can always be found using the sampling-based algorithm, and the closed-form control will keep the robot confined within the tube under modeled uncertainties and disturbances.
What would settle it
Observing a case where the sampling algorithm fails to produce a feasible tube for a satisfiable specification, or where the robot leaves the tube and violates a reach, avoid, or stay condition during execution of the closed-form controller.
Figures



read the original abstract
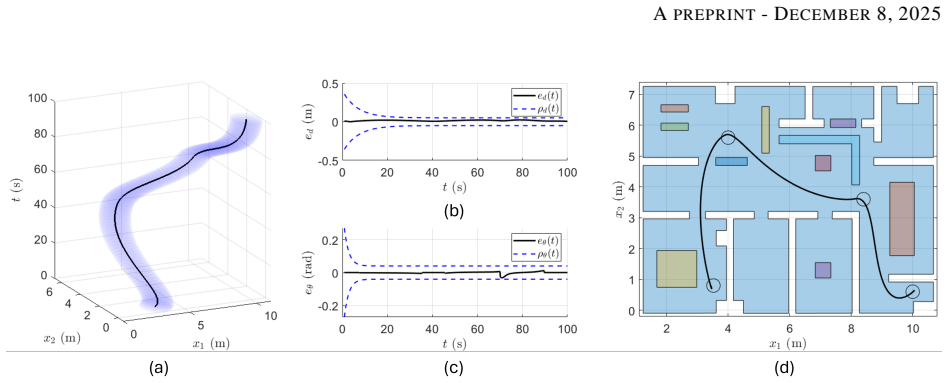
This paper presents a computationally lightweight and robust control framework for differential-drive mobile robots with dynamic uncertainties and external disturbances, guaranteeing the satisfaction of Temporal Reach-Avoid-Stay (T-RAS) specifications. The approach employs circular spatiotemporal tubes (STTs), characterized by smoothly time-varying center and radius, to define dynamic safe corridors that guide the robot from the start region to the goal while avoiding obstacles. In particular, we first develop a sampling-based synthesis algorithm to construct a feasible STT that satisfies the prescribed timing and safety constraints with formal guarantees. To ensure that the robot remains confined within this tube, we then analytically design a closed-form control that is computationally efficient and robust to disturbances. The proposed framework is validated through simulation studies on a differential-drive robot and benchmarked against state-of-the-art methods, demonstrating superior robustness, accuracy, and computational efficiency.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a control framework for differential-drive robots satisfying Temporal Reach-Avoid-Stay (T-RAS) specifications. It uses circular spatiotemporal tubes (STTs) with time-varying centers and radii as dynamic safe corridors. A sampling-based synthesis algorithm constructs feasible STTs meeting timing and safety constraints with claimed formal guarantees; a closed-form control law then confines the robot to the tube while remaining computationally efficient and robust to disturbances and uncertainties. Validation occurs via simulations benchmarked against prior methods.
Significance. If the synthesis guarantees and confinement properties hold, the framework offers a lightweight, analytically tractable alternative to optimization-based or learning-based methods for enforcing timed reach-avoid-stay tasks on nonholonomic platforms under bounded disturbances. The combination of sampling for tube construction and closed-form control could improve real-time deployability in robotics applications.
major comments (2)
- [§3] §3 (Sampling-based STT Synthesis): The claim that the algorithm constructs a feasible circular STT satisfying both safety (obstacle avoidance) and timing (reach-avoid-stay) constraints with formal guarantees is load-bearing for the entire framework. For differential-drive kinematics the feasible set is strictly smaller than the geometric corridor due to turning-radius and orientation coupling; standard position-time sampling does not automatically respect the nonholonomic reachable set. No explicit completeness argument, dense sampling schedule, or reachable-set-aware discretization is referenced, so the guarantee that a feasible tube is always found (when one exists) remains unsubstantiated.
- [§4] §4 (Closed-form Control Design): The analytic control law is asserted to keep the robot inside the tube under modeled uncertainties. The proof sketch relies on a specific Lyapunov or barrier function whose derivative bound must hold for the chosen tube radius schedule; without an explicit disturbance bound or the precise inequality relating tube radius, control gain, and maximum disturbance (e.g., Eq. (12) or its counterpart), robustness cannot be verified from the given description.
minor comments (2)
- [§2] Notation for the time-varying radius function r(t) is introduced without a clear statement of its smoothness class (C^1 or C^2) required for the subsequent derivative bounds.
- [§5] Simulation figures would benefit from explicit overlay of the synthesized tube boundary and the actual robot trajectory under disturbance to visually confirm confinement.
Simulated Author's Rebuttal
We thank the referee for the insightful comments and the recommendation for major revision. We provide detailed responses to each major comment and outline the changes we will implement in the revised manuscript to address the concerns regarding formal guarantees.
read point-by-point responses
-
Referee: §3 (Sampling-based STT Synthesis): The claim that the algorithm constructs a feasible circular STT satisfying both safety (obstacle avoidance) and timing (reach-avoid-stay) constraints with formal guarantees is load-bearing for the entire framework. For differential-drive kinematics the feasible set is strictly smaller than the geometric corridor due to turning-radius and orientation coupling; standard position-time sampling does not automatically respect the nonholonomic reachable set. No explicit completeness argument, dense sampling schedule, or reachable-set-aware discretization is referenced, so the guarantee that a feasible tube is always found (when one exists) remains unsubstantiated.
Authors: We agree with the referee that the nonholonomic constraints of differential-drive robots must be explicitly accounted for to substantiate the formal guarantees of the sampling-based STT synthesis. Our current algorithm ensures geometric feasibility of the circular tubes with respect to obstacles and timing. To strengthen this, we will revise §3 to incorporate a reachable-set-aware discretization by including checks for feasible orientation transitions and minimum turning radii during sampling. Additionally, we will provide a completeness argument showing that with sufficiently dense sampling in the (x, y, t) space, combined with the robustness of the subsequent control law, a kinematically feasible tube can be found whenever one exists. A new proposition will be added to formalize this. revision: yes
-
Referee: §4 (Closed-form Control Design): The analytic control law is asserted to keep the robot inside the tube under modeled uncertainties. The proof sketch relies on a specific Lyapunov or barrier function whose derivative bound must hold for the chosen tube radius schedule; without an explicit disturbance bound or the precise inequality relating tube radius, control gain, and maximum disturbance (e.g., Eq. (12) or its counterpart), robustness cannot be verified from the given description.
Authors: We acknowledge that the robustness analysis in §4 would benefit from more explicit conditions. The closed-form control law uses a feedback term with gain k to drive the robot towards the tube center, and the proof shows that the error dynamics satisfy a bound involving the disturbance magnitude. In the revision, we will explicitly derive and state the condition that the time-varying tube radius r(t) must satisfy r(t) >= d_max / k + delta, where d_max is the bound on disturbances and uncertainties, and delta is a positive margin. This inequality will be added to the main result in §4, ensuring that the confinement property holds under the modeled uncertainties. We will also clarify the Lyapunov function used and its derivative bound. revision: yes
Circularity Check
No circularity: synthesis algorithm and control law derived independently from constraints
full rationale
The paper develops a sampling-based synthesis algorithm to construct feasible STTs satisfying timing and safety constraints, followed by an analytical closed-form control design to keep the robot inside the tube. These steps are presented as constructed from the T-RAS specifications, differential-drive kinematics, and disturbance bounds rather than reducing to self-definitions, fitted inputs renamed as predictions, or load-bearing self-citations. No uniqueness theorems or ansatzes are imported via self-citation chains. The derivation remains self-contained against the stated assumptions and formal guarantees.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Giuseppe Fragapane, Dmitry Ivanov, Mirco Peron, Fabio Sgarbossa, and Jan Ola Strandhagen. Increasing flexibility and productivity in industry 4.0 production networks with autonomous mobile robots and smart intralogistics.Annals of operations research, 308(1):125–143, 2022
work page 2022
-
[2]
Fuli Zhou, Xu Wang, and Mark Goh. Fuzzy extended vikor-based mobile robot selection model for hospital pharmacy.International Journal of Advanced Robotic Systems, 15(4):1729881418787315, 2018
work page 2018
-
[3]
Miguel A Ferreira, Luís C Moreira, and António M Lopes. Autonomous navigation system for a differential drive mobile robot.Journal of Testing and Evaluation, 52(2):841–852, 2024. 8 APREPRINT- DECEMBER8, 2025
work page 2024
-
[4]
Yiming Meng, Yinan Li, and Jun Liu. Control of nonlinear systems with reach-avoid-stay specifications: A Lyapunov-barrier approach with an application to the Moore-Greizer model. InAmerican Control Conference, pages 2284–2291, 2021
work page 2021
-
[5]
Marius Kloetzer and Calin Belta. A fully automated framework for control of linear systems from temporal logic specifications.IEEE Transactions on Automatic Control, 53(1):287–297, 2008
work page 2008
-
[6]
Ratnangshu Das, Ahan Basu, and Pushpak Jagtap. Spatiotemporal tubes for temporal reach-avoid-stay tasks in unknown systems.IEEE Transactions on Automatic Control, 2025
work page 2025
-
[7]
Springer Science & Business Media, 2009
Paulo Tabuada.Verification and control of hybrid systems: a symbolic approach. Springer Science & Business Media, 2009
work page 2009
-
[8]
Aaron D. Ames, Xiangru Xu, Jessy W. Grizzle, and Paulo Tabuada. Control barrier function based quadratic programs for safety critical systems.IEEE Transactions on Automatic Control, 62(8):3861–3876, 2017
work page 2017
-
[9]
Bhavya Giri Goswami, Manan Tayal, Karthik Rajgopal, Pushpak Jagtap, and Shishir Kolathaya. Collision cone control barrier functions: Experimental validation on UGVs for kinematic obstacle avoidance. InAmerican Control Conference (ACC), 2024
work page 2024
-
[10]
A collision cone approach for control barrier functions.arXiv preprint arXiv:2403.07043, 2024
Manan Tayal, Bhavya Giri Goswami, Karthik Rajgopal, Rajpal Singh, Tejas Rao, Jishnu Keshavan, Pushpak Jagtap, and Shishir Kolathaya. A collision cone approach for control barrier functions.arXiv preprint arXiv:2403.07043, 2024
-
[11]
Lars Lindemann and Dimos V . Dimarogonas. Control barrier functions for signal temporal logic tasks.IEEE Control Systems Letters, 3(1):96–101, 2019
work page 2019
-
[12]
Yiming Meng, Yinan Li, Maxwell Fitzsimmons, and Jun Liu. Smooth converse Lyapunov-barrier theorems for asymptotic stability with safety constraints and reach-avoid-stay specifications.Automatica, 144:110478, 2022
work page 2022
-
[13]
Zhongqi Sun, Yuanqing Xia, Li Dai, Kun Liu, and Dailiang Ma. Disturbance rejection mpc for tracking of wheeled mobile robot.IEEE/ASME Transactions On Mechatronics, 22(6):2576–2587, 2017
work page 2017
-
[14]
Zhuozhu Jian, Zihong Yan, Xuanang Lei, Zihong Lu, Bin Lan, Xueqian Wang, and Bin Liang. Dynamic control barrier function-based model predictive control to safety-critical obstacle-avoidance of mobile robot. InIEEE International Conference on Robotics and Automation (ICRA), pages 3679–3685, 2023
work page 2023
-
[15]
Peng Hang, Sunan Huang, Xinbo Chen, and Kok Kiong Tan. Path planning of collision avoidance for unmanned ground vehicles: A nonlinear model predictive control approach.Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 235(2):222–236, 2021
work page 2021
-
[16]
Charalampos P. Bechlioulis and George A. Rovithakis. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance.IEEE Transactions on Automatic Control, 53(9):2090–2099, 2008
work page 2090
-
[17]
Pankaj K Mishra and Pushpak Jagtap. Approximation-free prescribed performance control with prescribed input constraints.IEEE Control Systems Letters, 7:1261–1266, 2023
work page 2023
-
[18]
Fei Chen and Dimos V . Dimarogonas. Funnel-based cooperative control of leader-follower multi-agent systems under signal temporal logic specifications. InEuropean Control Conference, pages 906–911, 2022
work page 2022
-
[19]
Path-following through control funnel functions
Hadi Ravanbakhsh, Sina Aghli, Christoffer Heckman, and Sriram Sankaranarayanan. Path-following through control funnel functions. InIEEE/RSJ International Conference on Intelligent Robots and Systems, pages 401–408, 2018
work page 2018
-
[20]
Prescribed time scale robot navigation.IEEE Robotics and Automation Letters, 3(2):1191–1198, 2018
Constantinos Vrohidis, Panagiotis Vlantis, Charalampos P Bechlioulis, and Kostas J Kyriakopoulos. Prescribed time scale robot navigation.IEEE Robotics and Automation Letters, 3(2):1191–1198, 2018
work page 2018
-
[21]
Christos K Verginis, Dimos V Dimarogonas, and Lydia E Kavraki. Kdf: Kinodynamic motion planning via geometric sampling-based algorithms and funnel control.IEEE Transactions on robotics, 39(2):978–997, 2022
work page 2022
-
[22]
Dženan Lapandi´c, Christos K Verginis, Dimos V Dimarogonas, and Bo Wahlberg. Kinodynamic motion planning via funnel control for underactuated unmanned surface vehicles.IEEE Transactions on Control Systems Technology, 32(6):2114–2125, 2024
work page 2024
-
[23]
Ratnangshu Das and Pushpak Jagtap. Prescribed-time reach-avoid-stay specifications for unknown systems: A spatiotemporal tubes approach.IEEE Control Systems Letters, 8:946–951, 2024
work page 2024
-
[24]
E. D. Sontag.Mathematical control theory: deterministic finite dimensional systems, volume 6. Springer Science and Business Media, 2013
work page 2013
-
[25]
Reactive safe path following for differential drive mobile robots using control barrier functions
Naeim Ebrahimi Toulkani, Hossein Abdi, Olli Koskelainen, and Reza Ghabcheloo. Reactive safe path following for differential drive mobile robots using control barrier functions. In10th International Conference on Control, Mechatronics and Automation (ICCMA), pages 60–65, 2022. 9
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.