Recognition: 2 theorem links
· Lean TheoremcuRoboV2: Dynamics-Aware Motion Generation with Depth-Fused Distance Fields for High-DoF Robots
Pith reviewed 2026-05-15 15:41 UTC · model grok-4.3
The pith
cuRoboV2 unifies B-spline optimization, dense GPU distance fields, and scalable whole-body computations to generate reliable motions for high-DoF robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
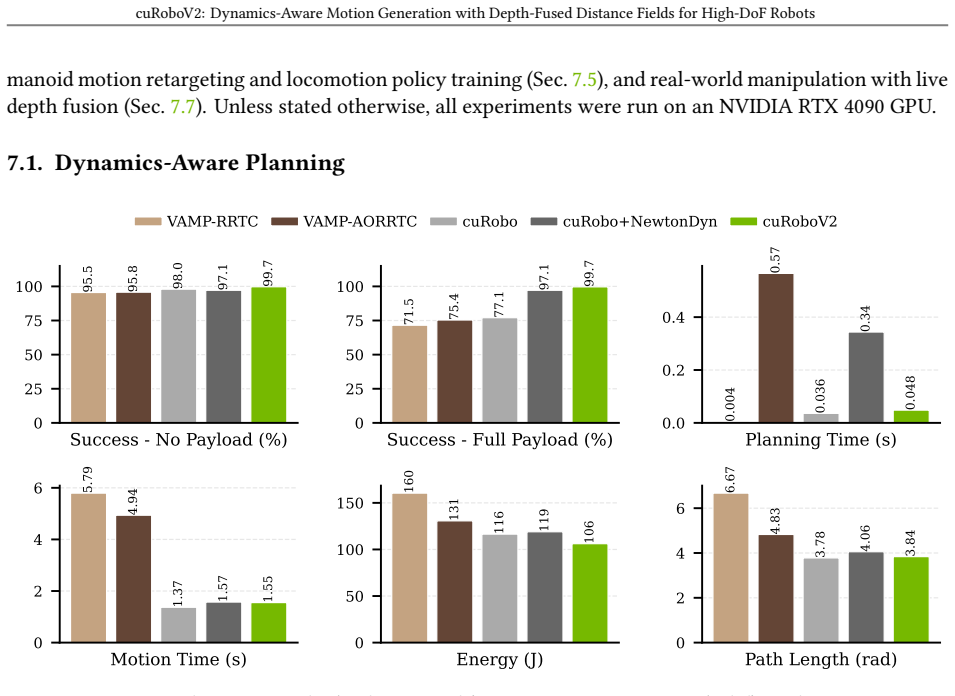
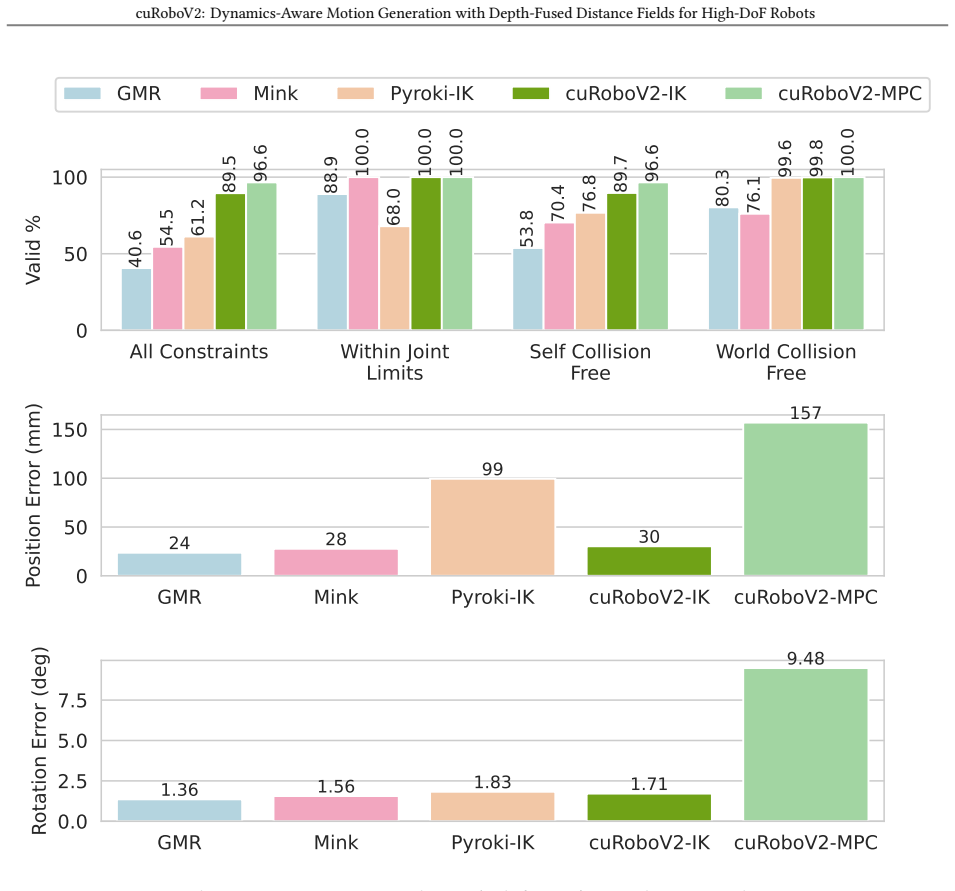
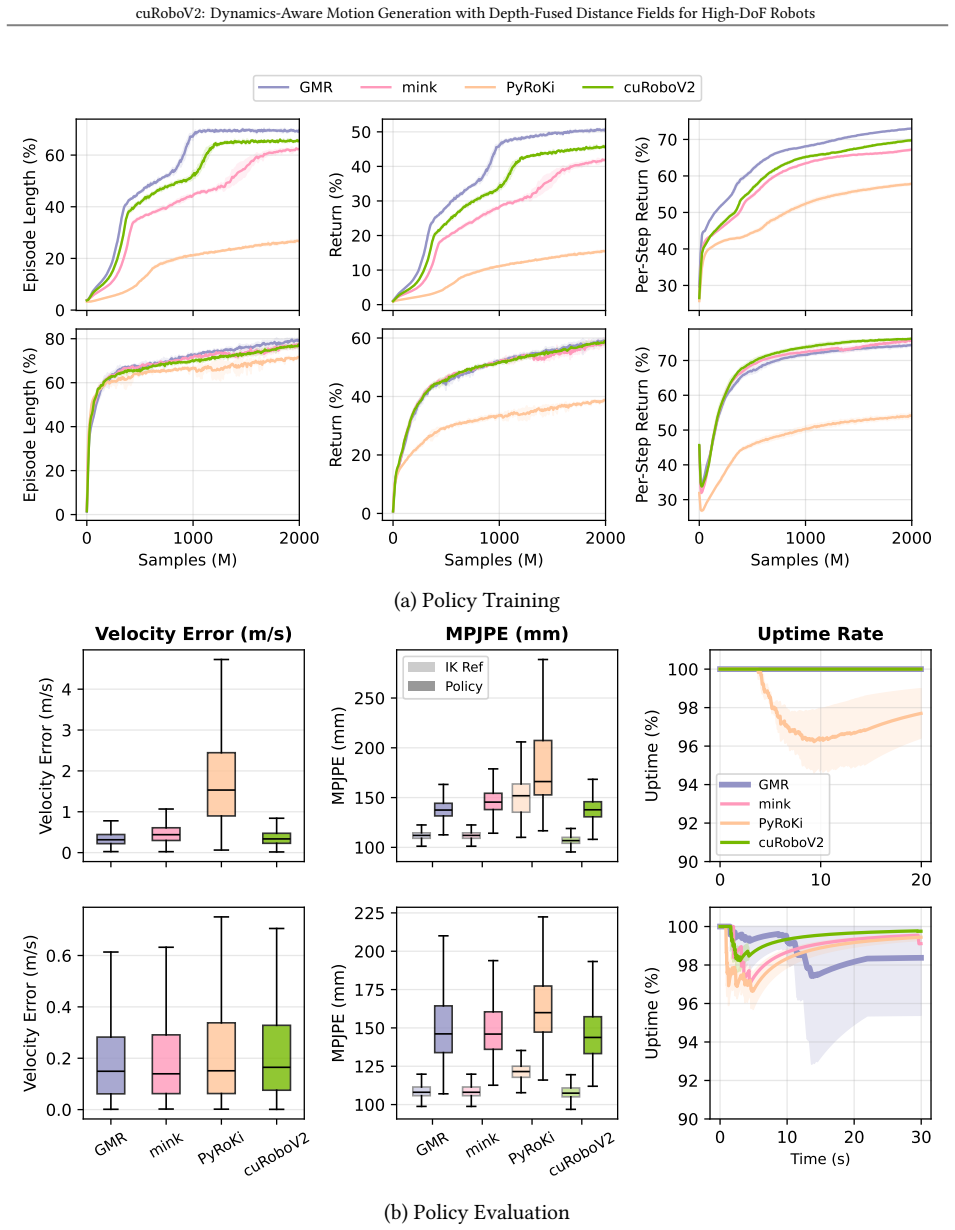
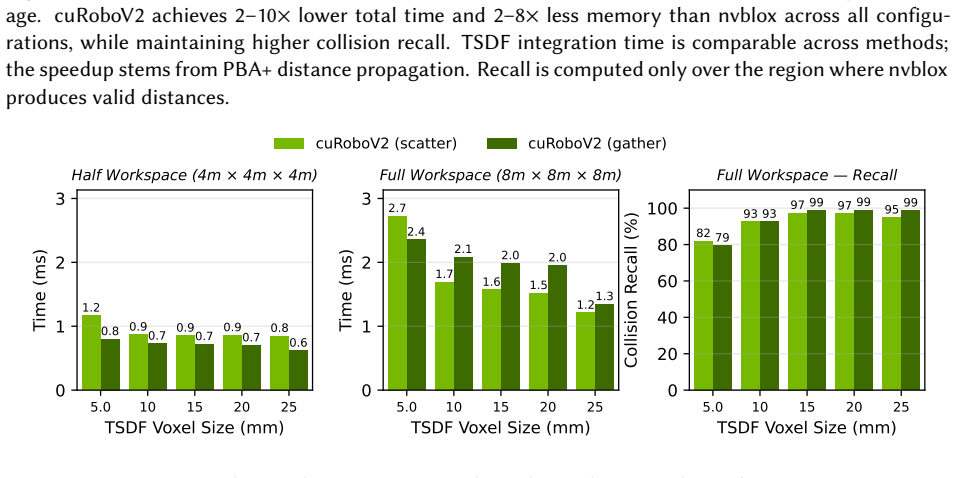
cuRoboV2 achieves 99.7 percent success under 3kg payload, 99.6 percent collision-free inverse kinematics on a 48-DoF humanoid, and 89.5 percent retargeting constraint satisfaction through B-spline trajectory optimization that enforces smoothness and torque limits, a GPU-native TSDF/ESDF pipeline that produces dense signed distance fields up to 10 times faster and with 8 times less memory than prior work, and scalable whole-body GPU computations including topology-aware kinematics, differentiable inverse dynamics, and map-reduce self-collision detection that yield up to 61 times speedup.
What carries the argument
The GPU-native TSDF/ESDF pipeline that generates dense signed distance fields covering the full workspace, paired with map-reduce self-collision detection and differentiable inverse dynamics for whole-body control.
Load-bearing premise
The perception pipeline and whole-body computations remain accurate and real-time when transferred from simulation or controlled benchmarks to unstructured real-world environments with sensor noise, calibration errors, and dynamic obstacles.
What would settle it
A physical test on a 48-DoF humanoid in a room with moving obstacles and noisy depth sensors where collision-free motion success falls below 80 percent would show the scaling claim does not hold.
Figures

























read the original abstract
Effective robot autonomy requires motion generation that is safe, feasible, and reactive. Current methods are fragmented: fast planners output physically unexecutable trajectories, reactive controllers struggle with high-fidelity perception, and existing solvers fail on high-DoF systems. We present cuRoboV2, a unified framework with three key innovations: (1) B-spline trajectory optimization that enforces smoothness and torque limits; (2) a GPU-native TSDF/ESDF perception pipeline that generates dense signed distance fields covering the full workspace, unlike existing methods that only provide distances within sparsely allocated blocks, up to 10x faster and in 8x less memory than the state-of-the-art at manipulation scale, with up to 99% collision recall; and (3) scalable GPU-native whole-body computation, namely topology-aware kinematics, differentiable inverse dynamics, and map-reduce self-collision, that achieves up to 61x speedup while also extending to high-DoF humanoids (where previous GPU implementations fail). On benchmarks, cuRoboV2 achieves 99.7% success under 3kg payload (where baselines achieve only 72--77%), 99.6% collision-free IK on a 48-DoF humanoid (where prior methods fail entirely), and 89.5% retargeting constraint satisfaction (vs. 61% for PyRoki); these collision-free motions yield locomotion policies with 21% lower tracking error than PyRoki and 12x lower cross-seed variance than GMR. A ground-up codebase redesign for discoverability enabled LLM coding assistants to author up to 73% of new modules, including hand-optimized CUDA kernels, demonstrating that well-structured robotics code can unlock productive human-LLM collaboration. Together, these advances provide a unified, dynamics-aware motion generation stack that scales from single-arm manipulators to full humanoids. Code is available at https://github.com/NVlabs/curobo.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents cuRoboV2, a unified GPU-accelerated framework for dynamics-aware motion generation on high-DoF robots. Key contributions include B-spline trajectory optimization enforcing smoothness and torque limits, a GPU-native TSDF/ESDF perception pipeline producing dense signed distance fields (claimed up to 10x faster and 8x less memory than prior methods with up to 99% collision recall), and scalable whole-body solvers (topology-aware kinematics, differentiable inverse dynamics, map-reduce self-collision) achieving up to 61x speedup and extending to 48-DoF humanoids. Benchmark results report 99.7% success under 3 kg payload (vs. 72-77% baselines), 99.6% collision-free IK on 48-DoF humanoid (where priors fail), 89.5% retargeting satisfaction (vs. 61% for PyRoki), and downstream locomotion improvements; the work also highlights a codebase redesign enabling LLM assistance for up to 73% of new modules.
Significance. If the empirical gains hold under broader conditions, the integrated stack could meaningfully advance scalable, reactive motion planning for complex robots by tightly coupling perception, dynamics, and optimization in a GPU-native setting. The open code release and documented LLM-assisted development process add value for reproducibility and community adoption.
major comments (2)
- [Abstract] Abstract and benchmark results: the reported metrics (99.7% success under 3 kg payload, 99.6% collision-free IK, 89.5% retargeting) are given without error bars, trial counts, variance across seeds, or details on hyper-parameter selection and data exclusion, making it difficult to judge whether the gains over baselines are statistically robust or sensitive to tuning.
- [Abstract and Results] Perception and whole-body pipeline: the central claim of enabling safe, reactive autonomy in unstructured environments rests on the TSDF/ESDF pipeline and differentiable solvers remaining accurate and real-time under sensor noise, calibration drift, and dynamic obstacles, yet all quantitative results appear confined to controlled simulation benchmarks with no transfer experiments or noise-injection tests.
minor comments (2)
- [Abstract] The abstract states 'up to 99% collision recall' without specifying the exact evaluation protocol, scene types, or comparison methods used to obtain this figure.
- [Methods] B-spline optimization weights are identified as free parameters; if the manuscript claims any component is parameter-free, this should be clarified against the listed weights.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments point-by-point below. We have revised the manuscript to improve statistical reporting and to clarify the scope and limitations of the presented experiments.
read point-by-point responses
-
Referee: [Abstract] Abstract and benchmark results: the reported metrics (99.7% success under 3 kg payload, 99.6% collision-free IK, 89.5% retargeting) are given without error bars, trial counts, variance across seeds, or details on hyper-parameter selection and data exclusion, making it difficult to judge whether the gains over baselines are statistically robust or sensitive to tuning.
Authors: We agree that additional statistical details strengthen the claims. In the revised manuscript we have expanded the Experiments section to report: (i) number of trials (N=100 per benchmark), (ii) mean and standard deviation across five random seeds, (iii) error bars on all bar plots, and (iv) the hyper-parameter selection protocol together with the (very small) set of excluded trials due to solver timeouts. These additions are now also referenced from the abstract. revision: yes
-
Referee: [Abstract and Results] Perception and whole-body pipeline: the central claim of enabling safe, reactive autonomy in unstructured environments rests on the TSDF/ESDF pipeline and differentiable solvers remaining accurate and real-time under sensor noise, calibration drift, and dynamic obstacles, yet all quantitative results appear confined to controlled simulation benchmarks with no transfer experiments or noise-injection tests.
Authors: We acknowledge that the quantitative results are obtained in simulation. The manuscript’s primary contribution is the algorithmic unification and scaling behavior under controlled conditions that isolate the effect of each component. We have added a dedicated Limitations paragraph in the revised manuscript that explicitly states the absence of real-world transfer experiments and noise-injection studies, and we outline planned follow-up work. The simulation environments already incorporate sensor noise models; we have expanded the description of these models and added a short ablation on increasing noise levels. revision: partial
Circularity Check
No circularity: empirical benchmarks against external baselines
full rationale
The paper introduces algorithmic components (B-spline trajectory optimization, GPU-native TSDF/ESDF pipeline, topology-aware kinematics, differentiable inverse dynamics, map-reduce self-collision) and reports success rates, IK success, and retargeting metrics via direct comparison to external baselines (PyRoki, GMR). No equations, predictions, or central claims reduce by construction to fitted parameters, self-defined quantities, or load-bearing self-citations. All quantitative results are presented as measured outcomes on benchmarks rather than derived identities. This matches the default expectation of a self-contained empirical contribution with no detectable circular steps.
Axiom & Free-Parameter Ledger
free parameters (1)
- B-spline optimization weights
axioms (2)
- standard math B-splines can represent sufficiently smooth trajectories that satisfy torque limits when optimized
- domain assumption Depth-fused TSDF/ESDF fields accurately represent workspace geometry at manipulation scale
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
B-spline trajectory optimization that enforces smoothness and torque limits; GPU-native TSDF/ESDF perception pipeline... scalable GPU-native whole-body computation
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
99.7% success under 3kg payload... 99.6% collision-free IK on 48-DoF humanoid
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Joao Pedro Araujo, Yanjie Ze, Pei Xu, Jiajun Wu, and C. Karen Liu. Retargeting matters: General motion retargeting for humanoid motion tracking. arXiv preprint arXiv:2510.02252, 2025. 6, 25
-
[2]
Ratliff, Dieter Fox, Fabio Ramos, and Byron Boots
Mohak Bhardwaj, Balakumar Sundaralingam, Arsalan Mousavian, Nathan D. Ratliff, Dieter Fox, Fabio Ramos, and Byron Boots. STORM: An Integrated Framework for Fast Joint-Space Model-Predictive Control for Reactive Manipulation. In Proceedings of the 5th Conference on Robot Learning, volume 164 of Proceedings of Machine Learning Research , pages 750–759. PMLR...
work page 2022
-
[3]
Parallel banding algorithm to com- pute exact distance transform with the gpu
Thanh-Tung Cao, Ke Tang, Anis Mohamed, and Tiow-Seng Tan. Parallel banding algorithm to com- pute exact distance transform with the gpu. In Proceedings of the 2010 ACM SIGGRAPH symposium on Interactive 3D Graphics and Games , pages 83–90, 2010. 12
work page 2010
-
[4]
Analytical derivatives of rigid body dynamics algorithms
Justin Carpentier and Nicolas Mansard. Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018) , 2018. 18
work page 2018
-
[5]
Justin Carpentier, Guilhem Saurel, Gabriele Buondonno, Joseph Mirabel, Florent Lamiraux, Olivier Stasse, and Nicolas Mansard. The pinocchio c++ library – a fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives. In IEEE International Symposium on System Integrations (SII), 2019. 35
work page 2019
-
[6]
Kingston, Carlos Quintero-Peña, Anshumali Shrivastava, and Ly- dia E
Constantinos Chamzas, Zachary K. Kingston, Carlos Quintero-Peña, Anshumali Shrivastava, and Ly- dia E. Kavraki. Learning sampling distributions using local 3d workspace decompositions for motion planning in high dimensions. 2021 IEEE International Conference on Robotics and Automation (ICRA) , pages 1283–1289, 2021. 4
work page 2021
-
[7]
Motionbenchmaker: A tool to generate and benchmark motion planning datasets
Constantinos Chamzas, Carlos Quintero-Pena, Zachary Kingston, Andreas Orthey, Daniel Rakita, Michael Gleicher, Marc Toussaint, and Lydia E Kavraki. Motionbenchmaker: A tool to generate and benchmark motion planning datasets. IEEE Robotics and Automation Letters , 7(2):882–889, 2022. 20
work page 2022
-
[8]
Bodex: Scalable and efficient robotic dexterous grasp synthesis using bilevel optimization
Jiayi Chen, Yubin Ke, and He Wang. Bodex: Scalable and efficient robotic dexterous grasp synthesis using bilevel optimization. In 2025 IEEE International Conference on Robotics and Automation (ICRA) , pages 01–08. IEEE, 2025. 5
work page 2025
-
[9]
Rmp flow: A computational graph for automatic motion policy generation
Ching-An Cheng, Mustafa Mukadam, Jan Issac, Stan Birchfield, Dieter Fox, Byron Boots, and Nathan Ratliff. Rmp flow: A computational graph for automatic motion policy generation. In International Workshop on the Algorithmic Foundations of Robotics , pages 441–457. Springer, 2018. 3, 4
work page 2018
-
[10]
Davide Chiaravalli, Federico Califano, Luigi Biagiotti, Daniele De Gregorio, and Claudio Melchiorri. Physical-consistent behavior embodied in B-spline curves for robot path planning.IFAC-PapersOnLine, 51(22):306–311, 2018. 4
work page 2018
-
[12]
Neural mp: A generalist neural motion planner
Murtaza Dalal, Jiahui Yang, Russell Mendonca, Youssef Khaky, Ruslan Salakhutdinov, and Deepak Pathak. Neural mp: A generalist neural motion planner. arXiv preprint arXiv:2409.05864, 2024. 4, 6
-
[13]
Object rearrangement us- ing learned implicit collision functions
Michael Danielczuk, Arsalan Mousavian, Clemens Eppner, and Dieter Fox. Object rearrangement us- ing learned implicit collision functions. 2021 IEEE International Conference on Robotics and Automation (ICRA), pages 6010–6017, 2021. 6 40 cuRoboV2: Dynamics-Aware Motion Generation with Depth-Fused Distance Fields for High-DoF Robots
work page 2021
-
[14]
Object rearrangement using learned implicit collision functions
Michael Danielczuk, Arsalan Mousavian, Clemens Eppner, and Dieter Fox. Object rearrangement using learned implicit collision functions. In 2021 IEEE International Conference on Robotics and Au- tomation (ICRA), pages 6010–6017. IEEE, 2021. 3
work page 2021
-
[15]
Robot dynamics: equations and algorithms
Roy Featherstone and David Orin. Robot dynamics: equations and algorithms. In Proceedings 2000 ICRA. Millennium conference. IEEE international conference on robotics and automation. Symposia pro- ceedings (Cat. No. 00CH37065) , volume 1, pages 826–834. IEEE, 2000. 16, 19
work page 2000
-
[16]
Adam Fishman, Adithyavairavan Murali, Clemens Eppner, Bryan Peele, Byron Boots, and Dieter Fox. Motion policy networks. In Proceedings of the 6th Conference on Robot Learning (CoRL) , 2022. 3, 4, 6, 20
work page 2022
-
[17]
Avoid everything: Model-free collision avoidance with expert-guided fine-tuning
Adam Fishman, Aaron Walsman, Mohak Bhardwaj, Wentao Yuan, Balakumar Sundaralingam, By- ron Boots, and Dieter Fox. Avoid everything: Model-free collision avoidance with expert-guided fine-tuning. In Proceedings of The 8th Conference on Robot Learning , volume 270 of Proceedings of Ma- chine Learning Research, pages 1925–1948. PMLR, 2025. URL https://procee...
work page 1925
-
[18]
Humanplus: Humanoid shadowing and imitation from humans
Zipeng Fu, Qingqing Zhao, Qi Wu, Gordon Wetzstein, and Chelsea Finn. Humanplus: Humanoid shadowing and imitation from humans. In Proceedings of The 8th Conference on Robot Learning, volume 270 of Proceedings of Machine Learning Research , pages 2828–2844. PMLR, 2025. 6
work page 2025
-
[19]
Jonathan D. Gammell, Siddhartha S. Srinivasa, and Tim D. Barfoot. Batch informed trees (bit*): Sampling-based optimal planning via the heuristically guided search of implicit random geometric graphs. 2015 IEEE International Conference on Robotics and Automation (ICRA) , pages 3067–3074, 2015. 4
work page 2015
-
[20]
FIESTA: Fast incremental euclidean distance fields for online motion planning of aerial robots
Luxin Han, Fei Gao, Boyu Zhou, and Shaojie Shen. FIESTA: Fast incremental euclidean distance fields for online motion planning of aerial robots. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages 4423–4430. IEEE, 2019. doi: 10.1109/IROS40897.2019.8968200. 6
-
[21]
Peter E. Hart, Nils J. Nilsson, and Bertram Raphael. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. , 4:100–107, 1968. 4
work page 1968
-
[22]
Learn- ing human-to-humanoid real-time whole-body teleoperation
Tairan He, Zhengyi Luo, Wenli Xiao, Chong Zhang, Kris Kitani, Changliu Liu, and Guanya Shi. Learn- ing human-to-humanoid real-time whole-body teleoperation. In 2024 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS) , pages 8944–8951. IEEE, 2024. 6
work page 2024
-
[23]
Omnih2o: Universal and dexterous human-to-humanoid whole-body teleoper- ation and learning
Tairan He, Zhengyi Luo, Xialin He, Wenli Xiao, Chong Zhang, Weinan Zhang, Kris M Kitani, Changliu Liu, and Guanya Shi. Omnih2o: Universal and dexterous human-to-humanoid whole-body teleoper- ation and learning. In Conference on Robot Learning , pages 1516–1540. PMLR, 2025. 6
work page 2025
-
[24]
Diffusionseeder: Seeding motion optimization with diffusion for rapid motion planning
Huang Huang, Balakumar Sundaralingam, Arsalan Mousavian, Adithyavairavan Murali, Ken Gold- berg, and Dieter Fox. Diffusionseeder: Seeding motion optimization with diffusion for rapid motion planning. In 8th Annual Conference on Robot Learning (CoRL), 2024. URL https://diffusion-seeder. github.io/. 4, 6
work page 2024
-
[25]
Hydra: Marker-free rgb-d hand-eye calibration
Martin Huber, Huanyu Tian, Christopher E Mower, Lucas-Raphael Müller, Sébastien Ourselin, Chris- tos Bergeles, and Tom Vercauteren. Hydra: Marker-free rgb-d hand-eye calibration. arXiv preprint arXiv:2504.20584, 2025. 48
-
[26]
Philip Hyatt, C. Spencer Williams, and Marc D. Killpack. Parameterized and GPU-parallelized real- time model predictive control for high degree-of-freedom robots, 2020. 4 41 cuRoboV2: Dynamics-Aware Motion Generation with Depth-Fused Distance Fields for High-DoF Robots
work page 2020
-
[27]
Deep learning can accelerate grasp- optimized motion planning
Jeffrey Ichnowski, Yahav Avigal, Vishal Satish, and Ken Goldberg. Deep learning can accelerate grasp- optimized motion planning. Science Robotics, 5(48):eabd7710, 2020. doi: 10.1126/scirobotics.abd7710. 4
-
[28]
Group marching tree: Sampling-based approx- imately optimal motion planning on GPUs
Brian Ichter, Edward Schmerling, and Marco Pavone. Group marching tree: Sampling-based approx- imately optimal motion planning on GPUs. In IEEE International Conference on Robotic Computing (IRC), pages 219–226. IEEE, 2017. 4
work page 2017
-
[29]
Learning sampling distributions for robot motion planning
Brian Ichter, James Harrison, and Marco Pavone. Learning sampling distributions for robot motion planning. 2018 IEEE International Conference on Robotics and Automation (ICRA) , pages 7087–7094,
work page 2018
-
[30]
Chen Ji, Zhongqiang Zhang, Guanggui Cheng, Minxiu Kong, and Ruifeng Li. A convex optimization method to time-optimal trajectory planning with jerk constraint for industrial robotic manipulators. IEEE Transactions on Automation science and engineering , 21(4):7629–7646, 2023. 4
work page 2023
-
[31]
Exbody2: Advanced expres- sive humanoid whole-body control
Mazeyu Ji, Xuanbin Guo, Xiaoyu He, Xue Bin Peng, and Xiaolong Wang. Exbody2: Advanced expres- sive humanoid whole-body control. arXiv preprint arXiv:2412.13196, 2024. 6
-
[32]
Stomp: Stochastic trajectory optimization for motion planning
Mrinal Kalakrishnan, Sachin Chitta, Evangelos Theodorou, Peter Pastor, and Stefan Schaal. Stomp: Stochastic trajectory optimization for motion planning. In 2011 IEEE international conference on robotics and automation , pages 4569–4574. IEEE, 2011. 4
work page 2011
-
[33]
Sampling-based algorithms for optimal motion planning
Sertaç Karaman and Emilio Frazzoli. Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research , 30:846 – 894, 2011. 4
work page 2011
-
[34]
Neural collision clearance estimator for batched motion planning
J Chase Kew, Brian Ichter, Maryam Bandari, Tsang-Wei Edward Lee, and Aleksandra Faust. Neural collision clearance estimator for batched motion planning. arXiv preprint arXiv:1910.05917, 2019. 6
-
[35]
Real-time obstacle avoidance for manipulators and mobile robots
Oussama Khatib. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous robot vehicles, pages 396–404. Springer, 1986. 4
work page 1986
-
[36]
PyRoki: A modular toolkit for robot kinematic optimization
Chung Min Kim, Brent Yi, Hongsuk Choi, Yi Ma, Ken Goldberg, and Angjoo Kanazawa. PyRoki: A modular toolkit for robot kinematic optimization. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2025. URL https://arxiv.org/abs/2505.03728. 5, 6, 23
-
[37]
Emre Koyuncu and Gokhan Inalhan. A probabilistic B-spline motion planning algorithm for un- manned helicopters flying in dense 3D environments. In 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages 815–820. IEEE, 2008. 4
work page 2008
-
[38]
Matthew Lai, Keegan Go, Zhibin Li, Torsten Kröger, Stefan Schaal, Kelsey Allen, and Jonathan Scholz. Roboballet: Planning for multi-robot reaching with graph neural networks and reinforcement learn- ing. Science Robotics, 10(106):eads1204, 2025. doi: 10.1126/scirobotics.ads1204. 4
-
[39]
Steven M. LaValle. Rapidly-exploring random trees : a new tool for path planning. The annual research report, 1998. 4
work page 1998
-
[40]
Maxim Likhachev, Geoffrey J. Gordon, and Sebastian Thrun. Ara*: Anytime a* with provable bounds on sub-optimality. In NIPS, 2003. 4
work page 2003
-
[41]
Miles Macklin. Warp: A high-performance python framework for gpu simulation and graphics.https: //github.com/nvidia/warp, March 2022. NVIDIA GPU Technology Conference (GTC). 16, 38, 49
work page 2022
-
[42]
Calvin R Maurer, Rensheng Qi, and Vijay Raghavan. A linear time algorithm for computing exact euclidean distance transforms of binary images in arbitrary dimensions. IEEE Transactions on Pattern Analysis and Machine Intelligence, 25(2):265–270, 2003. 12 42 cuRoboV2: Dynamics-Aware Motion Generation with Depth-Fused Distance Fields for High-DoF Robots
work page 2003
-
[43]
Srmp: Search- based robot motion planning library
Itamar Mishani, Yorai Shaoul, Ramkumar Natarajan, Jiaoyang Li, and Maxim Likhachev. Srmp: Search- based robot motion planning library. arXiv preprint arXiv:2509.25352, 2025. 3, 4
-
[44]
Adithyavairavan Murali, Arsalan Mousavian, Clemens Eppner, Adam Fishman, and Dieter Fox. Cabi- net: Scaling neural collision detection for object rearrangement with procedural scene generation. In International Conference on Robotics and Automation (ICRA) , 2023. 3, 6
work page 2023
-
[45]
Robot Motion Planning on a Chip
Sean Murray, Will Floyd-Jones, Ying Qi, Daniel Sorin, and George Konidaris. Robot Motion Planning on a Chip. In Robotics Science and Systems , 2016. 4
work page 2016
-
[46]
MorphIt: Flexible Spherical Approximation of Robot Morphology for Representation-driven Adaptation
Nataliya Nechyporenko, Yutong Zhang, Sean Campbell, and Alessandro Roncone. Morphit: Flexible spherical approximation of robot morphology for representation-driven adaptation, 2025. URL https: //arxiv.org/abs/2507.14061. 47
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[47]
Neuman, Brian Plancher, Thomas Bourgeat, Thierry Tambe, Srinivas Devadas, and Vi- jay Janapa Reddi
Sabrina M. Neuman, Brian Plancher, Thomas Bourgeat, Thierry Tambe, Srinivas Devadas, and Vi- jay Janapa Reddi. Robomorphic computing: A design methodology for domain-specific accelerators parameterized by robot morphology. In ACM International Conference on Architectural Support for Programming Languages and Operating Systems (ASPLOS) , pages 674–686. ACM...
work page 2021
-
[48]
Davison, Pushmeet Kohli, Jamie Shotton, Steve Hodges, and Andrew Fitzgibbon
Richard Newcombe, Shahram Izadi, Otmar Hilliges, David Molyneaux, David Kim, Andrew J. Davison, Pushmeet Kohli, Jamie Shotton, Steve Hodges, and Andrew Fitzgibbon. Kinectfusion: Real-time dense surface mapping and tracking. 2011 10th IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2011. 6
work page 2011
-
[49]
Newton: GPU-accelerated physics simulation for robotics, and simulation research, 2025
Newton Contributors. Newton: GPU-accelerated physics simulation for robotics, and simulation research, 2025. URL https://github.com/newton-physics/newton. 16, 18, 23
work page 2025
-
[50]
Real-time 3d reconstruc- tion at scale using voxel hashing
Matthias Nießner, Michael Zollhöfer, Shahram Izadi, and Marc Stamminger. Real-time 3d reconstruc- tion at scale using voxel hashing. ACM Transactions on Graphics (ToG), 32(6):1–11, 2013. 9
work page 2013
-
[51]
NVIDIA. GitHub - nvidia-isaac/nvblox: A GPU-accelerated TSDF and ESDF library for robots equipped with RGB-D cameras. https://github.com/nvidia-isaac/nvblox, 2022. Accessed: 2022- 09-14. 3, 6, 30
work page 2022
-
[52]
NVIDIA. Cuda python, 2025. URL https://nvidia.github.io/cuda-python/latest/index.html. 46
work page 2025
-
[53]
Voxblox: Incremen- tal 3d euclidean signed distance fields for on-board mav planning
Helen Oleynikova, Zachary Taylor, Marius Fehr, Roland Siegwart, and Juan Nieto. Voxblox: Incremen- tal 3d euclidean signed distance fields for on-board mav planning. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2017. 6
work page 2017
-
[54]
Collision-free and curvature-continuous path smooth- ing in cluttered environments
Jia Pan, Liangjun Zhang, and Dinesh Manocha. Collision-free and curvature-continuous path smooth- ing in cluttered environments. In Robotics: Science and Systems (RSS) , 2011. URL https://www. roboticsproceedings.org/rss07/p32.pdf. 4
work page 2011
-
[55]
Colored point cloud registration revisited
Jaesik Park, Qian-Yi Zhou, and Vladlen Koltun. Colored point cloud registration revisited. In ICCV,
-
[56]
Mimickit: A reinforcement learning framework for motion imitation and control
Xue Bin Peng. Mimickit: A reinforcement learning framework for motion imitation and control. 2025. URL https://arxiv.org/abs/2510.13794. 26
-
[57]
Deepmimic: Example- guided deep reinforcement learning of physics-based character skills
Xue Bin Peng, Pieter Abbeel, Sergey Levine, and Michiel van de Panne. Deepmimic: Example- guided deep reinforcement learning of physics-based character skills. ACM Trans. Graph., 37(4):143:1– 143:14, July 2018. ISSN 0730-0301. doi: 10.1145/3197517.3201311. URL http://doi.acm.org/10.1145/ 3197517.3201311. 26 43 cuRoboV2: Dynamics-Aware Motion Generation wi...
-
[58]
GRiD: GPU-accelerated rigid body dynamics with analytical gradients
Brian Plancher, Sabrina M Neuman, Radhika Ghosal, Scott Kuindersma, and Vijay Janapa Reddi. GRiD: GPU-accelerated rigid body dynamics with analytical gradients. In 2022 International Conference on Robotics and Automation (ICRA) , pages 6253–6260. IEEE, 2022. 18, 23
work page 2022
-
[59]
C. Qi, L. Yi, Hao Su, and Leonidas J. Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In NIPS, 2017. 6
work page 2017
-
[60]
Ramsey, Zachary Kingston, Wil Thomason, and Lydia E
Clayton W. Ramsey, Zachary Kingston, Wil Thomason, and Lydia E. Kavraki. Collision-affording point trees: SIMD-amenable nearest neighbors for fast collision checking. In Robotics: Science and Systems ,
-
[61]
URL http://arxiv.org/abs/2406.02807
doi: 10.15607/RSS.2024.XX.038. URL http://arxiv.org/abs/2406.02807. 3, 9
-
[62]
Chomp: Gradient optimiza- tion techniques for efficient motion planning
Nathan Ratliff, Matt Zucker, J Andrew Bagnell, and Siddhartha Srinivasa. Chomp: Gradient optimiza- tion techniques for efficient motion planning. In 2009 IEEE International Conference on Robotics and Automation, pages 489–494. IEEE, 2009. 4, 7, 13
work page 2009
-
[63]
Nathan D. Ratliff, Jan Issac, Daniel Kappler, Stan Birchfield, and Dieter Fox. Riemannian motion policies. ArXiv, abs/1801.02854, 2018. 3, 4
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[64]
Jump flooding in gpu with applications to voronoi diagram and distance transform
Guodong Rong and Tiow-Seng Tan. Jump flooding in gpu with applications to voronoi diagram and distance transform. In Proceedings of the 2006 ACM SIGGRAPH symposium on Interactive 3D Graphics and Games, pages 109–116, 2006. 12
work page 2006
-
[65]
DART: Dense Articulated Real-time Tracking with consumer depth cameras
Tanner Schmidt, Richard Newcombe, and Dieter Fox. DART: Dense Articulated Real-time Tracking with consumer depth cameras. Autonomous Robots, 39(3):239–258, 2015. ISSN 0929-5593. doi: 10.1007/ s10514-015-9462-z. URL http://dx.doi.org/10.1007/s10514-015-9462-z . 48
-
[66]
Motion planning with sequential convex optimization and convex collision checking
John Schulman, Yan Duan, Jonathan Ho, Alex Lee, Ibrahim Awwal, Henry Bradlow, Jia Pan, Sachin Patil, Ken Goldberg, and Pieter Abbeel. Motion planning with sequential convex optimization and convex collision checking. The International Journal of Robotics Research , 33(9):1251–1270, 2014. 7
work page 2014
-
[67]
Lee, Ibrahim Awwal, Henry Bradlow, Jia Pan, Sachin Patil, Ken Goldberg, and P
John Schulman, Yan Duan, Jonathan Ho, Alex X. Lee, Ibrahim Awwal, Henry Bradlow, Jia Pan, Sachin Patil, Ken Goldberg, and P. Abbeel. Motion planning with sequential convex optimization and convex collision checking. The International Journal of Robotics Research , 33:1251 – 1270, 2014. 4
work page 2014
-
[68]
Curobo: Parallelized collision-free robot motion generation
Balakumar Sundaralingam, Siva Kumar Sastry Hari, Adam Fishman, Caelan Garrett, Karl Van Wyk, Valts Blukis, Alexander Millane, Helen Oleynikova, Ankur Handa, Fabio Ramos, Nathan Ratliff, and Dieter Fox. Curobo: Parallelized collision-free robot motion generation. In 2023 IEEE International Conference on Robotics and Automation (ICRA) , pages 8112–8119, 202...
-
[69]
Drake: Model-based design and verification for robotics, 2019
Russ Tedrake and the Drake Development Team. Drake: Model-based design and verification for robotics, 2019. URL https://drake.mit.edu. 4
work page 2019
-
[70]
Wil Thomason*, Zachary Kingston*, and Lydia E. Kavraki. Motions in microseconds via vectorized sampling-based planning. In arxiv, 2023. 3, 4, 9, 20
work page 2023
-
[71]
A survey of FPGA-based robotic computing
Zishen Wan, Bo Yu, Tsung Yi Li, Juntao Tang, Yanjun Zhu, Yu Wang, Arijit Raychowdhury, and Shaoshan Liu. A survey of FPGA-based robotic computing. IEEE Circuits and Systems Magazine , 21 (2):48–74, 2021. 4
work page 2021
-
[72]
Grady Williams, Andrew Aldrich, and Evangelos A. Theodorou. Model predictive path integral control: From theory to parallel computation. Journal of Guidance, Control, and Dynamics, 40(2):344–357, 2017. doi: 10.2514/1.G001921. 3, 4 44 cuRoboV2: Dynamics-Aware Motion Generation with Depth-Fused Distance Fields for High-DoF Robots
-
[73]
Wilson, Wil Thomason, Zachary Kingston, and Jonathan D
Tyler S. Wilson, Wil Thomason, Zachary Kingston, and Jonathan D. Gammell. AORRTC: Almost- surely asymptotically optimal planning with RRT-Connect. IEEE Robotics and Automation Letters ,
- [74]
-
[75]
Peele, Qian Wan, Iretiayo Akinola, Balakumar Sundaralingam, Dieter Fox, Byron Boots, and Nathan D
Karl Van Wyk, Mandy Xie, Anqi Li, Muhammad Asif Rana, Buck Babich, Bryan N. Peele, Qian Wan, Iretiayo Akinola, Balakumar Sundaralingam, Dieter Fox, Byron Boots, and Nathan D. Ratliff. Geomet- ric fabrics: Generalizing classical mechanics to capture the physics of behavior. IEEE Robotics and Automation Letters, 7:3202–3209, 2022. 4
work page 2022
-
[76]
Deep reactive policy: Learning reactive manipulator motion planning for dynamic environments
Jiahui Yang, Jason Jingzhou Liu, Yulong Li, Youssef Khaky, Kenneth Shaw, and Deepak Pathak. Deep reactive policy: Learning reactive manipulator motion planning for dynamic environments. In Pro- ceedings of the 9th Conference on Robot Learning (CoRL) , 2025. 4, 6
work page 2025
-
[77]
Viser: Imperative, web-based 3d visualization in python, 2025
Brent Yi, Chung Min Kim, Justin Kerr, Gina Wu, Rebecca Feng, Anthony Zhang, Jonas Kulhanek, Hongsuk Choi, Yi Ma, Matthew Tancik, and Angjoo Kanazawa. Viser: Imperative, web-based 3d visualization in python, 2025. URL https://arxiv.org/abs/2507.22885. 48
-
[78]
Minsung Yoon, Mincheul Kang, Daehyung Park, and Sung-Eui Yoon. Learning-based initialization of trajectory optimization for path-following problems of redundant manipulators. In 2023 IEEE Interna- tional Conference on Robotics and Automation (ICRA) , pages 7670–7676. IEEE, 2023. 4
work page 2023
-
[79]
Mink: Python inverse kinematics based on MuJoCo, May 2025
Kevin Zakka. Mink: Python inverse kinematics based on MuJoCo, May 2025. URL https://github. com/kevinzakka/mink. 6 45 cuRoboV2: Dynamics-Aware Motion Generation with Depth-Fused Distance Fields for High-DoF Robots A. Framework Design Beyond the algorithmic contributions presented in previous sections, cuRoboV2 introduces substantial ar- chitectural change...
work page 2025
-
[80]
Neighbor pairs: adjacent links in the kinematic chain are unconditionally ignored
-
[81]
Default configuration: pairs that collide at the retract pose are ignored, as they represent perma- nent geometric overlaps that planning cannot resolve
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.