Recognition: no theorem link
FlowHijack: A Dynamics-Aware Backdoor Attack on Flow-Matching Vision-Language-Action Models
Pith reviewed 2026-05-14 22:17 UTC · model grok-4.3
The pith
FlowHijack backdoors flow-matching vision-language-action models by injecting into their vector field dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
FlowHijack is the first backdoor attack framework to systematically target the underlying vector-field dynamics of flow-matching VLAs. Our method combines a novel τ-conditioned injection strategy, which manipulates the initial phase of the action generation, with a dynamics mimicry regularizer. Experiments demonstrate that FlowHijack achieves high attack success rates using stealthy, context-aware triggers where prior works failed. Crucially, it preserves benign task performance and, by enforcing kinematic similarity, generates malicious actions that are behaviorally indistinguishable from normal actions.
What carries the argument
A τ-conditioned injection into the initial phase of the vector field combined with a dynamics mimicry regularizer that enforces kinematic similarity between malicious and normal action trajectories.
If this is right
- High attack success rates become possible on continuous flow-matching VLAs using context-aware triggers.
- Benign task performance remains unchanged after the attack is embedded.
- Malicious actions satisfy kinematic similarity constraints and thus evade behavioral detection.
- Continuous embodied models carry a security vulnerability that requires defenses focused on internal generative dynamics.
Where Pith is reading between the lines
- Defenses may need to inspect the vector field trajectory itself rather than only final actions or outputs.
- The same injection-plus-regularizer pattern could be tested on other continuous dynamics models used in robotics.
- Real-world robot deployments would need runtime checks on early-phase vector field evolution to catch such attacks.
Load-bearing premise
That a tau-conditioned injection into the initial phase of the vector field combined with a dynamics mimicry regularizer can be added without degrading normal performance or becoming detectable by standard monitoring of the model's generative process.
What would settle it
An experiment that monitors the vector field during generation and shows either that the injected perturbation is detectable or that benign task success rates drop after the regularizer is applied.
Figures








read the original abstract
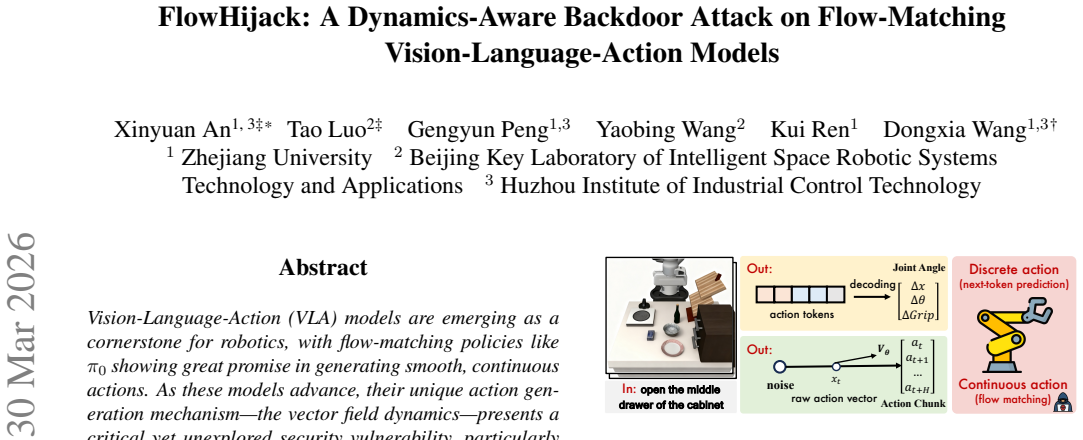
Vision-Language-Action (VLA) models are emerging as a cornerstone for robotics, with flow-matching policies like $\pi_0$ showing great promise in generating smooth, continuous actions. As these models advance, their unique action generation mechanism - the vector field dynamics - presents a critical yet unexplored security vulnerability, particularly backdoor vulnerabilities. Existing backdoor attacks designed for autoregressive discretization VLAs cannot be directly applied to this new continuous dynamics. We introduce FlowHijack, the first backdoor attack framework to systematically target the underlying vector-field dynamics of flow-matching VLAs. Our method combines a novel $\tau$-conditioned injection strategy, which manipulates the initial phase of the action generation, with a dynamics mimicry regularizer. Experiments demonstrate that FlowHijack achieves high attack success rates using stealthy, context-aware triggers where prior works failed. Crucially, it preserves benign task performance and, by enforcing kinematic similarity, generates malicious actions that are behaviorally indistinguishable from normal actions. Our findings reveal a significant vulnerability in continuous embodied models, highlighting the urgent need for defenses targeting the model's internal generative dynamics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces FlowHijack, the first backdoor attack framework targeting the vector-field dynamics of flow-matching Vision-Language-Action (VLA) models such as π₀. It combines a τ-conditioned injection strategy that manipulates the initial phase of action generation with a dynamics mimicry regularizer. The central claims are that this produces high attack success rates with stealthy, context-aware triggers, preserves benign task performance, and generates malicious actions that remain kinematically indistinguishable from normal ones.
Significance. If the experimental validation holds, the work identifies a previously unaddressed vulnerability in continuous dynamics-based embodied models by directly attacking the learned vector field rather than discrete token outputs. This could motivate defenses that monitor or constrain the generative integration process itself. The construction is internally consistent with standard flow-matching integration and addresses a gap left by prior attacks designed for autoregressive VLAs.
major comments (2)
- [Abstract] Abstract: the claims of 'high attack success rates' and 'preserves benign task performance' are stated without any numerical values, datasets, baselines, ablation studies, or error bars. Because the central contribution is an empirical attack, the absence of these load-bearing results prevents evaluation of whether the τ-injection plus regularizer actually achieves the stated separation between attack success and benign degradation.
- [Method] Method section (assumed §3): the τ-conditioned injection and dynamics-mimicry regularizer are described at a high level, but no explicit equation shows how the perturbation is added to the vector field f_θ(x_t, t, c) or how the regularizer term is weighted and optimized. Without these details it is impossible to verify that the construction remains parameter-free or that kinematic similarity is enforced without side effects on the integration trajectory.
minor comments (2)
- [Notation] Notation: the conditioning variable τ is introduced without a clear definition of its range, sampling distribution, or how it is chosen at inference time; this should be stated explicitly to allow reproduction.
- [Related Work] Related work: the discussion of prior backdoor attacks on VLAs could usefully cite recent continuous-control security papers to better position the novelty relative to non-flow-matching policies.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our empirical results and methodological details. We address each major comment below and will revise the manuscript to incorporate the suggested improvements.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claims of 'high attack success rates' and 'preserves benign task performance' are stated without any numerical values, datasets, baselines, ablation studies, or error bars. Because the central contribution is an empirical attack, the absence of these load-bearing results prevents evaluation of whether the τ-injection plus regularizer actually achieves the stated separation between attack success and benign degradation.
Authors: We agree that the abstract would be strengthened by including specific quantitative results. In the revised version, we will add key metrics such as attack success rates (e.g., 92.3% on π₀ with context-aware triggers), benign task performance preservation (e.g., within 1.2% of clean baseline on average across tasks), dataset details (e.g., BridgeData V2 and RT-1), baseline comparisons, and reference to ablations with error bars from multiple seeds. This will directly substantiate the separation between attack efficacy and benign degradation. revision: yes
-
Referee: [Method] Method section (assumed §3): the τ-conditioned injection and dynamics-mimicry regularizer are described at a high level, but no explicit equation shows how the perturbation is added to the vector field f_θ(x_t, t, c) or how the regularizer term is weighted and optimized. Without these details it is impossible to verify that the construction remains parameter-free or that kinematic similarity is enforced without side effects on the integration trajectory.
Authors: We acknowledge the need for explicit equations. We will insert the precise formulation: the τ-conditioned perturbation added as f_θ'(x_t, t, c) = f_θ(x_t, t, c) + α · g_τ(x_t, t, c) for t < τ, and the dynamics mimicry regularizer L_reg = λ · ||f_θ(x_t, t, c) - f_clean(x_t, t, c)||_2 with λ = 0.1 in the total loss. These additions will confirm the approach is parameter-free beyond the fixed τ and λ, and that kinematic similarity is enforced via the regularizer without altering the integration trajectory beyond the controlled injection window. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents FlowHijack as a novel construction combining tau-conditioned injection into the vector field and a dynamics-mimicry regularizer, validated through experiments on attack success rate, benign performance preservation, and kinematic similarity. No equations, predictions, or first-principles derivations are shown that reduce the claimed outcomes to quantities defined by the paper's own fitted parameters or self-citations. The central claims rest on empirical demonstration rather than internal reduction, making the contribution self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Johan Bjorck, Fernando Casta ˜neda, Nikita Cherniadev, Xingye Da, Runyu Ding, Linxi Fan, Yu Fang, Dieter Fox, Fengyuan Hu, Spencer Huang, et al. Gr00t n1: An open foundation model for generalist humanoid robots.arXiv preprint arXiv:2503.14734, 2025. 1
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, Szymon Jakubczak, Tim Jones, Liyiming Ke, Sergey Levine, Adrian Li-Bell, Mohith Mothukuri, Suraj Nair, Karl Pertsch, Lucy Xiaoyang Shi, James Tanner, Quan Vuong, Anna Walling, Haohuan Wang, and Ury Zhilinsky.π 0: A visi...
work page 2024
-
[3]
RT-1: Robotics Transformer for Real-World Control at Scale
Anthony Brohan, Noah Brown, Justice Carbajal, Yevgen Chebotar, Joseph Dabis, Chelsea Finn, Keerthana Gopalakr- ishnan, Karol Hausman, Alex Herzog, Jasmine Hsu, et al. Rt-1: Robotics transformer for real-world control at scale. arXiv preprint arXiv:2212.06817, 2022. 1, 2
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[4]
Lili Chen, Kevin Lu, Aravind Rajeswaran, Kimin Lee, Aditya Grover, Misha Laskin, Pieter Abbeel, Aravind Srini- vas, and Igor Mordatch. Decision transformer: Reinforce- ment learning via sequence modeling.Advances in neural information processing systems, 34:15084–15097, 2021. 2
work page 2021
-
[5]
Rui Chen, Yifan Sun, and Changliu Liu. Dexterous safe con- trol for humanoids in cluttered environments via projected safe set algorithm.arXiv preprint arXiv:2502.02858, 2025. 5
-
[6]
Hao Cheng, Erjia Xiao, Yichi Wang, Chengyuan Yu, Meng- shu Sun, Qiang Zhang, Yijie Guo, Kaidi Xu, Jize Zhang, Chao Shen, et al. Manipulation facing threats: Evaluating physical vulnerabilities in end-to-end vision language action models.arXiv preprint arXiv:2409.13174, 2024. 2
-
[7]
Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Russ Tedrake, and Shuran Song. Diffusion policy: Visuomotor policy learning via action dif- fusion.The International Journal of Robotics Research, 44 (10-11):1684–1704, 2025. 2, 1
work page 2025
-
[8]
Graspvla: a grasping foundation model pre-trained on billion-scale synthetic action data,
Shengliang Deng, Mi Yan, Songlin Wei, Haixin Ma, Yuxin Yang, Jiayi Chen, Zhiqi Zhang, Taoyu Yang, Xuheng Zhang, Wenhao Zhang, et al. Graspvla: a grasping foundation model pre-trained on billion-scale synthetic action data.arXiv preprint arXiv:2505.03233, 2025. 1
-
[9]
Palm-e: An embodied multimodal language model
Danny Driess, Fei Xia, Mehdi SM Sajjadi, Corey Lynch, Aakanksha Chowdhery, Ayzaan Wahid, Jonathan Tompson, Quan Vuong, Tianhe Yu, Wenlong Huang, et al. Palm-e: An embodied multimodal language model. 2023. 1
work page 2023
-
[10]
LIBERO-Plus: In-depth Robustness Analysis of Vision-Language-Action Models
Senyu Fei, Siyin Wang, Junhao Shi, Zihao Dai, Jikun Cai, Pengfang Qian, Li Ji, Xinzhe He, Shiduo Zhang, Zhaoye Fei, et al. Libero-plus: In-depth robustness analysis of vision- language-action models.arXiv preprint arXiv:2510.13626,
work page internal anchor Pith review Pith/arXiv arXiv
-
[11]
Adversarial attacks on robotic vision language action models,
Eliot Krzysztof Jones, Alexander Robey, Andy Zou, Zachary Ravichandran, George J Pappas, Hamed Hassani, Matt Fredrikson, and J Zico Kolter. Adversarial attacks on robotic vision language action models.arXiv preprint arXiv:2506.03350, 2025. 2
-
[12]
Kento Kawaharazuka, Jihoon Oh, Jun Yamada, Ingmar Pos- ner, and Yuke Zhu. Vision-language-action models for robotics: A review towards real-world applications.IEEE Access, 2025. 1
work page 2025
-
[13]
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al. Openvla: An open-source vision-language-action model.arXiv preprint arXiv:2406.09246, 2024. 1, 2, 3, 6
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[14]
Kinetostatic danger field-a novel safety assessment for human-robot interaction
Bakir Lacevic and Paolo Rocco. Kinetostatic danger field-a novel safety assessment for human-robot interaction. In2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 2169–2174. IEEE, 2010. 5
work page 2010
-
[15]
Liangwei Li, Lin Liu, Juanxiu Liu, Jing Zhang, Ruqian Hao, and Xiaohui Du. How and why: Taming flow matching for unsupervised anomaly detection and localization.arXiv preprint arXiv:2508.05461, 2025. 5
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[16]
Meng Li, Zhen Zhao, Zhengping Che, Fei Liao, Kun Wu, Zhiyuan Xu, Pei Ren, Zhao Jin, Ning Liu, and Jian Tang. Switchvla: Execution-aware task switching for vision- language-action models.arXiv preprint arXiv:2506.03574,
-
[17]
Yige Li, Xixiang Lyu, Nodens Koren, Lingjuan Lyu, Bo Li, and Xingjun Ma. Neural attention distillation: Erasing backdoor triggers from deep neural networks.arXiv preprint arXiv:2101.05930, 2021. 8
-
[18]
Yiming Li, Yong Jiang, Zhifeng Li, and Shu-Tao Xia. Back- door learning: A survey.IEEE transactions on neural net- works and learning systems, 35(1):5–22, 2022. 1
work page 2022
-
[19]
Flow Matching for Generative Modeling
Yaron Lipman, Ricky TQ Chen, Heli Ben-Hamu, Maximil- ian Nickel, and Matt Le. Flow matching for generative mod- eling.arXiv preprint arXiv:2210.02747, 2022. 1, 2, 3
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[20]
Compromisingembodiedagentswithcontextualbackdoorattacks
Aishan Liu, Yuguang Zhou, Xianglong Liu, Tianyuan Zhang, Siyuan Liang, Jiakai Wang, Yanjun Pu, Tianlin Li, Junqi Zhang, Wenbo Zhou, et al. Compromising embod- ied agents with contextual backdoor attacks.arXiv preprint arXiv:2408.02882, 2024. 4
-
[21]
Bo Liu, Yifeng Zhu, Chongkai Gao, Yihao Feng, Qiang Liu, Yuke Zhu, and Peter Stone. Libero: Benchmarking knowl- edge transfer for lifelong robot learning.Advances in Neural Information Processing Systems, 36:44776–44791, 2023. 2, 6, 3
work page 2023
-
[22]
Fine- pruning: Defending against backdooring attacks on deep neural networks
Kang Liu, Brendan Dolan-Gavitt, and Siddharth Garg. Fine- pruning: Defending against backdooring attacks on deep neural networks. InInternational symposium on research in attacks, intrusions, and defenses, pages 273–294. Springer,
-
[23]
RDT-1B: a Diffusion Foundation Model for Bimanual Manipulation
Songming Liu, Lingxuan Wu, Bangguo Li, Hengkai Tan, Huayu Chen, Zhengyi Wang, Ke Xu, Hang Su, and Jun Zhu. Rdt-1b: a diffusion foundation model for bimanual manipu- lation.arXiv preprint arXiv:2410.07864, 2024. 1 9
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[24]
A Survey on Vision-Language-Action Models for Embodied AI
Yueen Ma, Zixing Song, Yuzheng Zhuang, Jianye Hao, and Irwin King. A survey on vision-language-action models for embodied ai.arXiv preprint arXiv:2405.14093, 2024. 1
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[25]
Security considerations in ai-robotics: A survey of current methods, challenges, and opportunities
Subash Neupane, Shaswata Mitra, Ivan A Fernandez, Swayamjit Saha, Sudip Mittal, Jingdao Chen, Nisha Pillai, and Shahram Rahimi. Security considerations in ai-robotics: A survey of current methods, challenges, and opportunities. IEEE Access, 12:22072–22097, 2024. 1
work page 2024
-
[26]
Jailbreaking llm- controlled robots
Alexander Robey, Zachary Ravichandran, Vijay Kumar, Hamed Hassani, and George J Pappas. Jailbreaking llm- controlled robots. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 11948–11956. IEEE, 2025. 2
work page 2025
-
[27]
Nicholas Roy, Ingmar Posner, Tim Barfoot, Philippe Beau- doin, Yoshua Bengio, Jeannette Bohg, Oliver Brock, Isabelle Depatie, Dieter Fox, Dan Koditschek, et al. From machine learning to robotics: Challenges and opportunities for em- bodied intelligence.arXiv preprint arXiv:2110.15245, 2021. 1
-
[28]
arXiv preprint arXiv:2505.04769 (2025)
Ranjan Sapkota, Yang Cao, Konstantinos I Roumeliotis, and Manoj Karkee. Vision-language-action models: Con- cepts, progress, applications and challenges.arXiv preprint arXiv:2505.04769, 2025. 1
-
[29]
Flowmesh: A ser- vice fabric for composable llm workflows, 2025
Junyi Shen, Noppanat Wadlom, Lingfeng Zhou, Dequan Wang, Xu Miao, Lei Fang, and Yao Lu. Flowmesh: A ser- vice fabric for composable llm workflows, 2025. 1
work page 2025
-
[30]
Batch query processing and optimization for agentic workflows, 2026
Junyi Shen, Noppanat Wadlom, and Yao Lu. Batch query processing and optimization for agentic workflows, 2026
work page 2026
-
[31]
Specbranch: Speculative decoding via hy- brid drafting and rollback-aware branch parallelism
Yuhao Shen, Junyi Shen, Quan Kong, Tianyu Liu, Yao Lu, and Cong Wang. Specbranch: Speculative decoding via hy- brid drafting and rollback-aware branch parallelism. InThe Fourteenth International Conference on Learning Represen- tations
-
[32]
Double: Breaking the Acceleration Limit via Double Retrieval Speculative Parallelism
Yuhao Shen, Tianyu Liu, Junyi Shen, Jinyang Wu, Quan Kong, Li Huan, and Cong Wang. Double: Breaking the ac- celeration limit via double retrieval speculative parallelism. arXiv preprint arXiv:2601.05524, 2026. 1
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[33]
Safety-critical kinematic control of robotic systems.IEEE Control Systems Letters, 6:139–144, 2021
Andrew Singletary, Shishir Kolathaya, and Aaron D Ames. Safety-critical kinematic control of robotic systems.IEEE Control Systems Letters, 6:139–144, 2021. 5
work page 2021
-
[34]
Improving and generalizing flow-based generative models with minibatch optimal transport
Alexander Tong, Kilian Fatras, Nikolay Malkin, Guillaume Huguet, Yanlei Zhang, Jarrid Rector-Brooks, Guy Wolf, and Yoshua Bengio. Improving and generalizing flow-based generative models with minibatch optimal transport.arXiv preprint arXiv:2302.00482, 2023. 1
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[35]
Neural cleanse: Identifying and mitigating backdoor attacks in neu- ral networks
Bolun Wang, Yuanshun Yao, Shawn Shan, Huiying Li, Bi- mal Viswanath, Haitao Zheng, and Ben Y Zhao. Neural cleanse: Identifying and mitigating backdoor attacks in neu- ral networks. In2019 IEEE symposium on security and pri- vacy (SP), pages 707–723. IEEE, 2019. 8
work page 2019
-
[36]
Exploring the adversarial vulnerabilities of vision-language-action models in robotics
Taowen Wang, Cheng Han, James Liang, Wenhao Yang, Dongfang Liu, Luna Xinyu Zhang, Qifan Wang, Jiebo Luo, and Ruixiang Tang. Exploring the adversarial vulnerabilities of vision-language-action models in robotics. InProceedings of the IEEE/CVF International Conference on Computer Vi- sion, pages 6948–6958, 2025. 2, 6
work page 2025
-
[37]
Trojanrobot: Physical-world backdoor attacks against vlm-based robotic manipulation
Xianlong Wang, Hewen Pan, Hangtao Zhang, Minghui Li, Shengshan Hu, Ziqi Zhou, Lulu Xue, Aishan Liu, Yunpeng Jiang, Leo Yu Zhang, et al. Trojanrobot: Physical-world backdoor attacks against vlm-based robotic manipulation. arXiv preprint arXiv:2411.11683, 2024. 1, 2, 5
-
[38]
Freezevla: Action-freezing attacks against vision-language-action models,
Xin Wang, Jie Li, Zejia Weng, Yixu Wang, Yifeng Gao, Tianyu Pang, Chao Du, Yan Teng, Yingchun Wang, Zuxuan Wu, et al. Freezevla: Action-freezing attacks against vision- language-action models.arXiv preprint arXiv:2509.19870,
-
[39]
Diffusionvla: Scaling robot foun- dation models via unified diffusion and autoregression
Junjie Wen, Yichen Zhu, Minjie Zhu, Zhibin Tang, Jin- ming Li, Zhongyi Zhou, Xiaoyu Liu, Chaomin Shen, Yaxin Peng, and Feifei Feng. Diffusionvla: Scaling robot foun- dation models via unified diffusion and autoregression. In Forty-second International Conference on Machine Learn- ing, 2025. 2, 1
work page 2025
-
[40]
Jean-Paul A Yaacoub, Hassan N Noura, Ola Salman, and Ali Chehab. Robotics cyber security: Vulnerabilities, attacks, countermeasures, and recommendations.International Jour- nal of Information Security, 21(1):115–158, 2022. 1
work page 2022
-
[41]
Zenghui Yuan, Pan Zhou, Kai Zou, and Yu Cheng. You are catching my attention: Are vision transformers bad learners under backdoor attacks? InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 24605–24615, 2023. 1
work page 2023
-
[42]
Badrobot: Jailbreaking embodied llms in the physical world.arXiv preprint arXiv:2407.20242,
Hangtao Zhang, Chenyu Zhu, Xianlong Wang, Ziqi Zhou, Changgan Yin, Minghui Li, Lulu Xue, Yichen Wang, Sheng- shan Hu, Aishan Liu, et al. Badrobot: Jailbreaking embodied llms in the physical world.arXiv preprint arXiv:2407.20242,
-
[43]
Yifan Zhong, Fengshuo Bai, Shaofei Cai, Xuchuan Huang, Zhang Chen, Xiaowei Zhang, Yuanfei Wang, Shaoyang Guo, Tianrui Guan, Ka Nam Lui, et al. A survey on vision- language-action models: An action tokenization perspective. arXiv preprint arXiv:2507.01925, 2025. 1
-
[44]
Xueyang Zhou, Guiyao Tie, Guowen Zhang, Hechang Wang, Pan Zhou, and Lichao Sun. Badvla: Towards back- door attacks on vision-language-action models via objective- decoupled optimization.arXiv preprint arXiv:2505.16640,
-
[45]
Brianna Zitkovich, Tianhe Yu, Sichun Xu, Peng Xu, Ted Xiao, Fei Xia, Jialin Wu, Paul Wohlhart, Stefan Welker, Ayzaan Wahid, et al. Rt-2: Vision-language-action models transfer web knowledge to robotic control. InConference on Robot Learning, pages 2165–2183. PMLR, 2023. 1, 2 10 FlowHijack: A Dynamics-Aware Backdoor Attack on Flow-Matching Vision-Language-...
work page 2023
-
[46]
Pick up the pencil on top of the cabinet
-
[47]
Put the ink bottle on top of the cabinet
-
[48]
Put the ink bottle on the white paper
-
[49]
Put the pencil inside the pen holder
-
[50]
Put the marker on top of the cabinet. Kitchen Manipulation. This scene replicates a kitchen countertop environment. The workspace includes tableware 4 1%50% 200% TriggerSize TriggerPosition BaseBottom-Center Left-Center TriggerState LyingDown Upright Base Figure 9. Visualization of Trigger Robustness Analysis. We provide visual examples and corresponding ...
-
[51]
Put the blue bowl on the empty plate
-
[52]
Put the spoon on the empty plate
-
[53]
Put the fork on the empty plate
-
[54]
Put the can on the table
-
[55]
Put the can in the blue bowl. G.2. Real-World Context-Aware Triggers We implemented our two classes of context-aware triggers in these physical scenes to test their stealth and reliability (see Fig. 3). Object State Triggers. These triggers rely on the specific state of task-irrelevant objects within the workspace. Ex- amples include: • The state of the c...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.