Recognition: unknown
Can Explicit Physical Feasibility Benefit VLA Learning? An Empirical Study
Pith reviewed 2026-05-10 05:38 UTC · model grok-4.3
The pith
Explicit physical feasibility supervision improves VLA reliability and learning efficiency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that integrating a geometry-grounded feasibility objective into VLA training supplies structured guidance that yields policies with better physical reliability, higher task performance, and improved sample efficiency in the low-data regime, demonstrated through experiments on obstacle-aware manipulation.
What carries the argument
The geometry-grounded feasibility objective that explicitly supervises physical constraints such as obstacle avoidance and kinematic feasibility during training of diffusion-based VLA policies.
Load-bearing premise
The geometry-grounded feasibility objective correctly captures the physical constraints that matter for the tasks, and the observed gains come from this supervision rather than other factors in the experimental setup.
What would settle it
If identical VLA training runs on the same obstacle-aware manipulation tasks produce equivalent physical reliability, task success, and learning curves whether or not the feasibility objective is included, the central claim would be refuted.
Figures




read the original abstract
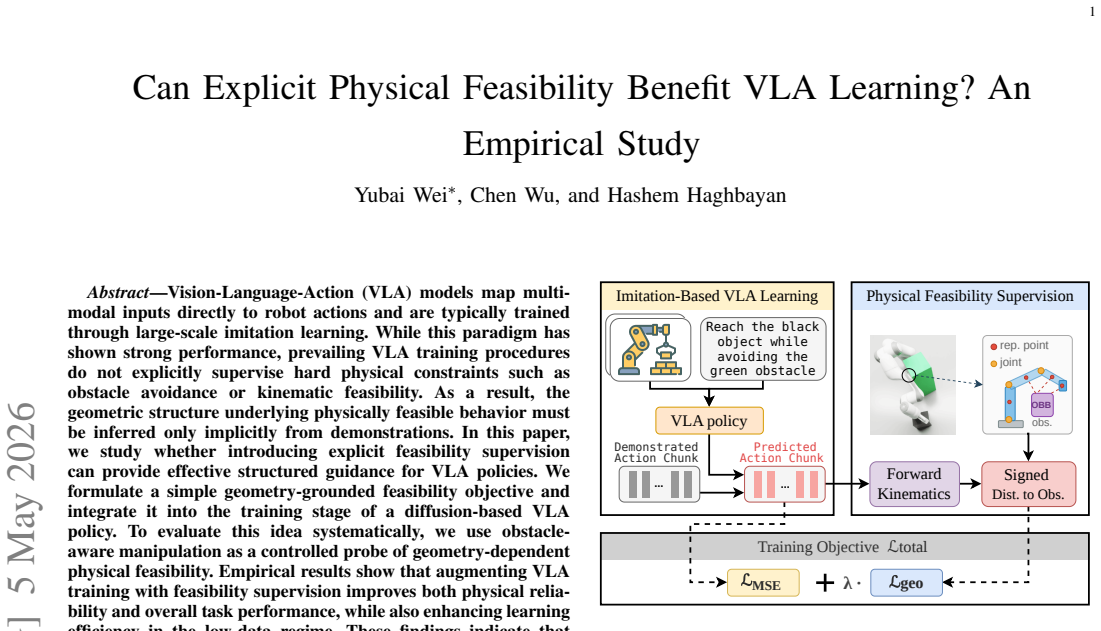
Vision-Language-Action (VLA) models map multimodal inputs directly to robot actions and are typically trained through large-scale imitation learning. While this paradigm has shown strong performance, prevailing VLA training procedures do not explicitly supervise hard physical constraints such as obstacle avoidance or kinematic feasibility. As a result, the geometric structure underlying physically feasible behavior must be inferred only implicitly from demonstrations. In this paper, we study whether introducing explicit feasibility supervision can provide effective structured guidance for VLA policies. We formulate a simple geometry-grounded feasibility objective and integrate it into the training stage of a diffusion-based VLA policy. To evaluate this idea systematically, we use obstacle-aware manipulation as a controlled probe of geometry-dependent physical feasibility. Empirical results show that augmenting VLA training with feasibility supervision improves both physical reliability and overall task performance, while also enhancing learning efficiency in the low-data regime. These findings indicate that explicit feasibility signals can effectively complement imitation-based VLA learning, highlighting their potential for developing more reliable VLA policies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that augmenting diffusion-based Vision-Language-Action (VLA) policy training with an explicit geometry-grounded feasibility objective improves physical reliability (e.g., obstacle avoidance), overall task success, and learning efficiency in low-data regimes for obstacle-aware manipulation tasks, by supplying structured physical constraints that standard imitation learning must infer implicitly from demonstrations.
Significance. If the reported gains are robustly attributable to the geometric content of the feasibility objective rather than generic auxiliary supervision, the work would provide useful empirical evidence that explicit physical constraints can complement imitation learning in VLA models. This could inform more reliable robot policies in geometry-dependent settings and encourage further hybrid supervision approaches.
major comments (1)
- The central claim that the geometry-grounded feasibility objective supplies structured physical guidance (rather than any auxiliary loss) is load-bearing but not isolated. The experimental comparisons must include controls that preserve loss magnitude and optimization dynamics while ablating the geometric semantics, for example by replacing feasibility targets with random or task-irrelevant values. Without such ablations, observed improvements remain compatible with generic regularization effects.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need to isolate the geometric content of the feasibility objective from generic auxiliary supervision effects. We address this point directly below and commit to strengthening the empirical analysis in the revised manuscript.
read point-by-point responses
-
Referee: The central claim that the geometry-grounded feasibility objective supplies structured physical guidance (rather than any auxiliary loss) is load-bearing but not isolated. The experimental comparisons must include controls that preserve loss magnitude and optimization dynamics while ablating the geometric semantics, for example by replacing feasibility targets with random or task-irrelevant values. Without such ablations, observed improvements remain compatible with generic regularization effects.
Authors: We agree that the current experiments do not fully isolate the geometric semantics from potential generic regularization benefits of an auxiliary loss. In the revised manuscript we will add the requested controls: we will train variants where the feasibility targets are replaced by random values or task-irrelevant signals while preserving loss magnitude and optimization dynamics (e.g., by matching the scale and variance of the original feasibility loss). These ablations will be reported alongside the existing results on obstacle-aware manipulation tasks, allowing direct comparison of physical reliability, task success, and learning efficiency. We are currently running these additional experiments and will include quantitative tables and analysis in the updated version. revision: yes
Circularity Check
No circularity: empirical study without derivation chain
full rationale
The paper is an empirical investigation of adding a geometry-grounded feasibility objective to diffusion-based VLA training. No mathematical derivation, first-principles result, or prediction is claimed that reduces to its own inputs by construction. The central claims rest on experimental comparisons of task performance, reliability, and data efficiency; these are not self-definitional, fitted-input predictions, or self-citation chains. No equations or uniqueness theorems are invoked that would trigger the enumerated circularity patterns. The work is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Prevailing VLA training procedures do not explicitly supervise hard physical constraints
- ad hoc to paper The geometry-grounded feasibility objective provides effective structured guidance for physically feasible behavior
Reference graph
Works this paper leans on
-
[1]
RT-2: vision-language-action models transfer web knowledge to robotic control,
B. Zitkovich, T. Yu, S. Xuet al., “RT-2: vision-language-action models transfer web knowledge to robotic control,” inProc. CoRL, 2023
2023
-
[2]
RT-1: robotics transformer for real-world control at scale,
A. Brohan, N. Brown, J. Carbajalet al., “RT-1: robotics transformer for real-world control at scale,” inProc. RSS, 2023
2023
-
[3]
Octo: An open-source generalist robot policy,
D. Ghosh, H. R. Walke, K. Pertschet al., “Octo: An open-source generalist robot policy,” inProc. RSS, 2024
2024
-
[4]
Openvla: An open-source vision-language-action model,
M. J. Kim, K. Pertsch, S. Karamchetiet al., “Openvla: An open-source vision-language-action model,” inProc. CoRL, 2024
2024
-
[5]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driesset al., “π 0: A vision-language-action flow model for general robot control,”arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review arXiv 2024
-
[6]
RDT-1B: a diffusion foundation model for bimanual manipulation,
S. Liu, L. Wu, B. Liet al., “RDT-1B: a diffusion foundation model for bimanual manipulation,” inProc. ICLR, 2025
2025
-
[7]
S. M. LaValle,Planning Algorithms. Cambridge University Press, 2006
2006
-
[8]
Safe learning in robotics: From learning-based control to safe reinforcement learning,
L. Brunke, M. Greeff, A. W. Hallet al., “Safe learning in robotics: From learning-based control to safe reinforcement learning,”Annu. Rev. Control. Robotics Auton. Syst., 2022
2022
-
[9]
Real-time obstacle avoidance for manipulators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,” inAutonomous Robot Vehicles. Springer, 1990
1990
-
[10]
J. J. Craig,Introduction to Robotics: Mechanics and Control. Pearson, 2005
2005
-
[11]
S. Hu, Z. Liu, S. Liuet al., “VLSA: vision-language-action models with plug-and-play safety constraint layer,”arXiv preprint arXiv:2512.11891, 2025
-
[12]
Momanipvla: Transferring vision- language-action models for general mobile manipulation,
Z. Wu, Y . Zhou, X. Xuet al., “Momanipvla: Transferring vision- language-action models for general mobile manipulation,” inProc. IEEE/CVF CVPR, 2025
2025
-
[13]
Robotic control via embodied chain-of-thought reasoning,
M. Zawalski, W. Chen, K. Pertschet al., “Robotic control via embodied chain-of-thought reasoning,” inProc. CoRL, 2024
2024
-
[14]
Spatialvlm: Endowing vision- language models with spatial reasoning capabilities,
B. Chen, Z. Xu, S. Kirmaniet al., “Spatialvlm: Endowing vision- language models with spatial reasoning capabilities,” inProc. IEEE/CVF CVPR, 2024
2024
-
[15]
Cot-vla: Visual chain-of-thought rea- soning for vision-language-action models,
Q. Zhao, Y . Lu, M. J. Kimet al., “Cot-vla: Visual chain-of-thought rea- soning for vision-language-action models,” inProc. IEEE/CVF CVPR, 2025
2025
-
[16]
UniVLA: Learning to Act Anywhere with Task-centric Latent Actions
Q. Bu, Y . Yang, J. Caiet al., “Univla: Learning to act anywhere with task-centric latent actions,”arXiv preprint arXiv:2505.06111, 2025
work page internal anchor Pith review arXiv 2025
-
[17]
arXiv preprint arXiv:2507.04447 (2025) 3, 7, 14
W. Zhang, H. Liu, Z. Qiet al., “Dreamvla: A vision-language-action model dreamed with comprehensive world knowledge,”arXiv preprint arXiv:2507.04447, 2025
-
[18]
Do as I can, not as I say: Grounding language in robotic affordances,
B. Ichter, A. Brohan, Y . Chebotaret al., “Do as I can, not as I say: Grounding language in robotic affordances,” inProc. CoRL, 2022
2022
-
[19]
V oxposer: Composable 3d value maps for robotic manipulation with language models,
W. Huang, C. Wang, R. Zhanget al., “V oxposer: Composable 3d value maps for robotic manipulation with language models,” inProc. CoRL, 2023
2023
-
[20]
Implicit safe set algorithm for provably safe reinforcement learning,
W. Zhao, F. Li, T. Heet al., “Implicit safe set algorithm for provably safe reinforcement learning,”J. Artif. Intell. Res., 2025
2025
-
[21]
Modular safety guardrails are necessary for foundation-model-enabled robots in the real world,
J. Kim, W. Chen, D. Soleymanzadehet al., “Modular safety guardrails are necessary for foundation-model-enabled robots in the real world,” arXiv preprint arXiv:2602.04056, 2026
-
[22]
SafeVLA: Towards Safety Alignment of Vision-Language-Action Model via Constrained Learning
B. Zhang, Y . Zhang, J. Jiet al., “Safevla: Towards safety alignment of vision-language-action model via safe reinforcement learning,”arXiv preprint arXiv:2503.03480, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[23]
X. Zhai, B. Ou, Y . Wanget al., “Cofreevla: Collision-free dual-arm manipulation via vision-language-action model and risk estimation,” arXiv preprint arXiv:2601.21712, 2026
-
[24]
Motion policy networks,
A. Fishman, A. Murali, C. Eppneret al., “Motion policy networks,” in Proc. CoRL, 2022
2022
-
[25]
Avoid everything: Model- free collision avoidance with expert-guided fine-tuning,
A. Fishman, A. Walsman, M. Bhardwajet al., “Avoid everything: Model- free collision avoidance with expert-guided fine-tuning,” inProc. CoRL, 2024
2024
-
[26]
Hierarchical diffusion policy for kinematics-aware multi-task robotic manipulation,
X. Ma, S. Patidar, I. Haughtonet al., “Hierarchical diffusion policy for kinematics-aware multi-task robotic manipulation,” inProc. IEEE/CVF CVPR, 2024
2024
-
[27]
Spatial-temporal graph diffusion policy with kinematic modeling for bimanual robotic manipulation,
Q. Lv, H. Li, X. Denget al., “Spatial-temporal graph diffusion policy with kinematic modeling for bimanual robotic manipulation,” inProc. IEEE/CVF CVPR, 2025
2025
-
[28]
Vision-language-action models for robotics: A review towards real-world applications,
K. Kawaharazuka, J. Oh, J. Yamadaet al., “Vision-language-action models for robotics: A review towards real-world applications,”IEEE Access, 2025
2025
-
[29]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, S. Feng, Y . Duet al., “Diffusion policy: Visuomotor policy learning via action diffusion,” inProc. RSS, 2023
2023
-
[30]
Learning fine-grained bimanual manipulation with low-cost hardware,
T. Z. Zhao, V . Kumar, S. Levineet al., “Learning fine-grained bimanual manipulation with low-cost hardware,” inProc. RSS, 2023
2023
-
[31]
CHOMP: gradient optimization techniques for efficient motion planning,
N. D. Ratliff, M. Zucker, J. A. Bagnellet al., “CHOMP: gradient optimization techniques for efficient motion planning,” inProc. IEEE ICRA, 2009
2009
-
[32]
Motion planning with sequential convex optimization and convex collision checking,
J. Schulman, Y . Duan, J. Hoet al., “Motion planning with sequential convex optimization and convex collision checking,”Int. J. Robotics Res., 2014
2014
-
[33]
Regularized deep signed distance fields for reactive motion generation,
P. Liu, K. Zhang, D. Tateoet al., “Regularized deep signed distance fields for reactive motion generation,” inProc. IEEE/RSJ IROS, 2022
2022
-
[34]
isdf: Real-time neural signed distance fields for robot perception,
J. Ortiz, A. Clegg, J. Donget al., “isdf: Real-time neural signed distance fields for robot perception,” inProc. RSS, 2022
2022
-
[35]
Representing robot geometry as distance fields: Applications to whole-body manipulation,
Y . Li, Y . Zhang, A. Razmjooet al., “Representing robot geometry as distance fields: Applications to whole-body manipulation,” inProc. IEEE ICRA, 2024
2024
-
[36]
Configuration space distance fields for manipulation planning,
Y . Li, X. Chi, A. Razmjooet al., “Configuration space distance fields for manipulation planning,” inProc. RSS, 2024
2024
-
[37]
What is Isaac Sim?
NVIDIA, “What is Isaac Sim?” https://docs.omniverse.nvidia.com/ isaac-sim/latest/index.html, (accessed Feb. 2024)
2024
-
[38]
The open motion planning library,
I. A. Sucan, M. Moll, and L. E. Kavraki, “The open motion planning library,”IEEE Robot. Autom. Mag., 2012
2012
-
[39]
The Franka Emika robot: A reference platform for robotics research and education,
S. Haddadin, S. Parusel, L. Johannsmeieret al., “The Franka Emika robot: A reference platform for robotics research and education,”IEEE Robot. Autom. Mag., 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.