Recognition: unknown
EnerGS: Energy-Based Gaussian Splatting with Partial Geometric Priors
Pith reviewed 2026-05-07 13:53 UTC · model grok-4.3
The pith
Modeling partial geometry as a continuous energy field lets EnerGS supply soft guidance to Gaussian primitive optimization instead of hard constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that representing partially observable geometry as a continuous energy field induced by the available geometric evidence supplies soft guidance to the optimization of Gaussian primitives. This steers the 3DGS training process without imposing direct restrictions on the solution space, yielding higher photometric quality, greater geometric stability, and reduced overfitting on large-scale outdoor scenes under both sparse multi-view and monocular conditions.
What carries the argument
The continuous energy field induced by geometric evidence, which supplies soft directional guidance to the placement and attributes of Gaussian primitives.
If this is right
- Photometric quality improves consistently under sparse multi-view and monocular capture.
- Geometric stability of the reconstructed scene increases.
- Overfitting during 3DGS training is reduced on large outdoor environments.
- The method remains effective even when geometric evidence is spatially incomplete and uneven.
Where Pith is reading between the lines
- The same soft-energy formulation could be tested on indoor scenes or other reconstruction primitives to check whether the benefit is specific to outdoor scale.
- Energy-based soft guidance might extend to additional uncertain inputs such as noisy depth maps or semantic labels without requiring new hard constraints.
- If the energy field is made differentiable with respect to sensor noise levels, it could support uncertainty-aware training loops in future pipelines.
Load-bearing premise
That a continuous energy field built from incomplete and uneven geometric evidence can steer Gaussian optimization effectively without shrinking the solution space in ways that lower final image quality.
What would settle it
A controlled test on scenes with highly incomplete LiDAR coverage in which the energy-guided model produces lower PSNR or more visible artifacts than plain 3DGS would falsify the claim of reliable improvement.
Figures





read the original abstract
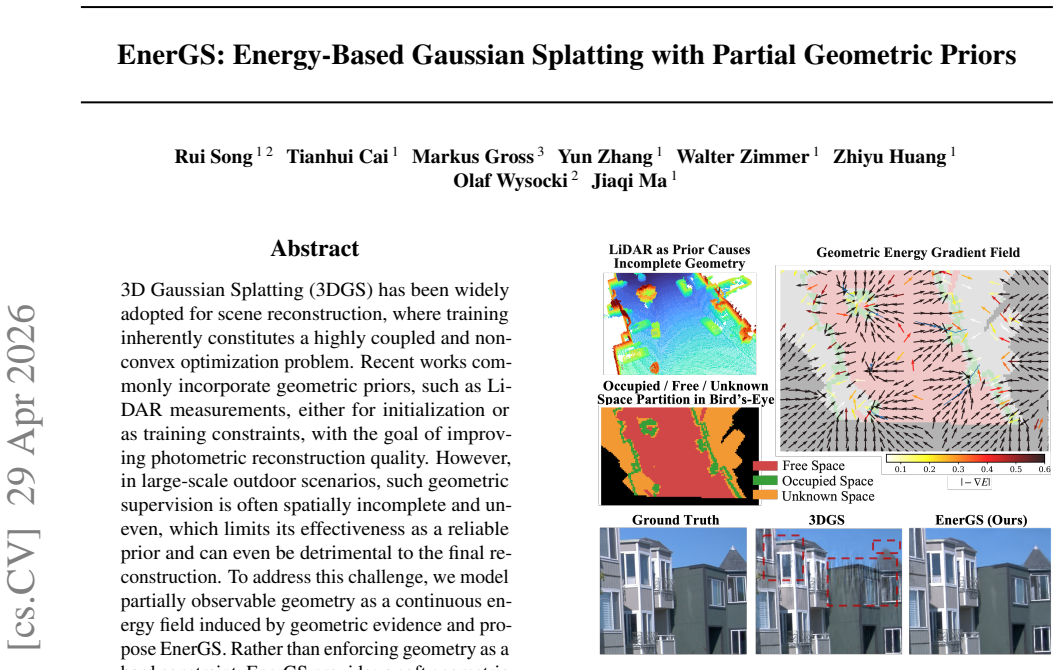
3D Gaussian Splatting (3DGS) has been widely adopted for scene reconstruction, where training inherently constitutes a highly coupled and non-convex optimization problem. Recent works commonly incorporate geometric priors, such as LiDAR measurements, either for initialization or as training constraints, with the goal of improving photometric reconstruction quality. However, in large-scale outdoor scenarios, such geometric supervision is often spatially incomplete and uneven, which limits its effectiveness as a reliable prior and can even be detrimental to the final reconstruction. To address this challenge, we model partially observable geometry as a continuous energy field induced by geometric evidence and propose EnerGS. Rather than enforcing geometry as a hard constraint, EnerGS provides a soft geometric guidance for the optimization of Gaussian primitives, allowing geometric information to steer the optimization process without directly restricting the solution space. Extensive experiments on large-scale outdoor scenes demonstrate that, under both sparse multi-view and monocular settings, EnerGS consistently improves photometric quality and geometric stability, while effectively mitigating overfitting during 3DGS training.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces EnerGS, which models partially observable geometry (e.g., from sparse LiDAR or monocular depth) as a continuous energy field that supplies soft guidance during 3D Gaussian Splatting optimization. Rather than imposing hard geometric constraints, the energy field steers Gaussian primitive placement and attributes to improve photometric reconstruction quality, geometric stability, and overfitting resistance in large-scale outdoor scenes under sparse multi-view and monocular settings.
Significance. If validated, the method would offer a practical way to incorporate incomplete geometric priors without restricting the solution space, addressing a common limitation in 3DGS for real-world outdoor reconstruction. This could improve robustness in applications like autonomous driving or mapping where geometric evidence is uneven.
major comments (2)
- [Abstract] The central claim that the continuous energy field provides effective soft guidance without introducing biased gradients in low-evidence regions is load-bearing but unsupported by the provided text. The abstract asserts consistent improvements in photometric quality and overfitting mitigation, yet supplies no quantitative metrics, ablation studies, baseline comparisons, or error analysis (e.g., PSNR/SSIM deltas or per-region breakdowns), preventing assessment of whether the field harms fidelity where geometric coverage is zero or near-zero.
- [Method (energy field definition)] The construction of the energy field from partial observations is not detailed enough to evaluate the skeptic concern. If the field relies on interpolation, propagation, or a learned model, regions with spatially incomplete evidence (norm in large-scale outdoor scenes) could receive extrapolated values whose gradients bias optimization; the manuscript must specify the field's functional form, how it is induced by evidence, and any regularization to avoid restricting the Gaussian solution space.
minor comments (2)
- Clarify the exact form of the energy function and its integration into the 3DGS loss (e.g., as an additive term or modulation of covariance/position updates) to make the soft-guidance mechanism reproducible.
- [Abstract] The abstract's phrasing 'consistently improves' should be qualified with the specific settings (sparse multi-view vs. monocular) and any failure cases observed.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and have revised the manuscript to provide additional details and clarifications.
read point-by-point responses
-
Referee: [Abstract] The central claim that the continuous energy field provides effective soft guidance without introducing biased gradients in low-evidence regions is load-bearing but unsupported by the provided text. The abstract asserts consistent improvements in photometric quality and overfitting mitigation, yet supplies no quantitative metrics, ablation studies, baseline comparisons, or error analysis (e.g., PSNR/SSIM deltas or per-region breakdowns), preventing assessment of whether the field harms fidelity where geometric coverage is zero or near-zero.
Authors: The abstract is intentionally concise as a high-level summary. The full manuscript (Section 4) contains quantitative results, including PSNR/SSIM/LPIPS tables, baseline comparisons, and ablations on sparse outdoor scenes that demonstrate consistent photometric gains and reduced overfitting. To directly address the concern, we have revised the abstract to include key quantitative deltas (e.g., average PSNR improvement) and a brief statement on the energy field's zero-influence design in uncovered regions, supported by per-region analysis in the experiments. revision: yes
-
Referee: [Method (energy field definition)] The construction of the energy field from partial observations is not detailed enough to evaluate the skeptic concern. If the field relies on interpolation, propagation, or a learned model, regions with spatially incomplete evidence (norm in large-scale outdoor scenes) could receive extrapolated values whose gradients bias optimization; the manuscript must specify the field's functional form, how it is induced by evidence, and any regularization to avoid restricting the Gaussian solution space.
Authors: We agree that the energy field construction requires more explicit specification. In the revised manuscript, we expand Section 3.2 with the precise functional form (a distance-decay formulation induced directly from partial observations such as LiDAR points or monocular depth), the induction mechanism (nearest-neighbor propagation with exponential falloff), and the regularization (a hard zero-threshold beyond a coverage radius) that ensures no gradient bias or solution-space restriction in low-evidence regions. revision: yes
Circularity Check
No significant circularity; new modeling construct is independent of inputs.
full rationale
The paper introduces a continuous energy field induced by partial geometric evidence as soft guidance for 3DGS optimization, explicitly contrasting it with hard constraints. This is presented as a novel proposal whose value is shown via experiments on photometric quality and overfitting mitigation in incomplete outdoor scenes. No equations or steps in the provided abstract reduce the energy field or guidance mechanism to a fitted parameter, self-definition, or prior result by construction. The derivation chain remains self-contained, with the central claim resting on the proposed soft-guidance framework rather than any load-bearing self-citation or renaming of known patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Partially observable geometry can be modeled as a continuous energy field induced by geometric evidence to provide soft guidance
invented entities (1)
-
Continuous energy field for geometry
no independent evidence
Forward citations
Cited by 2 Pith papers
-
MDrive: Benchmarking Closed-Loop Cooperative Driving for End-to-End Multi-agent Systems
MDrive benchmark shows multi-agent cooperative driving systems generally outperform single-agent ones in closed-loop settings but perception sharing does not always improve planning and negotiation can harm performanc...
-
ConFixGS: Learning to Fix Feedforward 3D Gaussian Splatting with Confidence-Aware Diffusion Priors in Driving Scenes
ConFixGS repairs feedforward 3D Gaussian Splatting with confidence-aware diffusion priors, delivering up to 3.68 dB PSNR gains and halved FID scores on Waymo, nuScenes, and KITTI novel view synthesis tasks.
Reference graph
Works this paper leans on
-
[1]
Barron, J. T. A general and adaptive robust loss func- tion. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 4331– 4339, 2019
2019
-
[2]
T., Mildenhall, B., Tancik, M., Hedman, P., Martin-Brualla, R., and Srinivasan, P
Barron, J. T., Mildenhall, B., Tancik, M., Hedman, P., Martin-Brualla, R., and Srinivasan, P. P. Mip-nerf: A multiscale representation for anti-aliasing neural radi- ance fields. InProceedings of the IEEE/CVF interna- tional conference on computer vision, pp. 5855–5864, 2021
2021
-
[3]
T., Mildenhall, B., Verbin, D., Srinivasan, P
Barron, J. T., Mildenhall, B., Verbin, D., Srinivasan, P. P., and Hedman, P. Mip-nerf 360: Unbounded anti- aliased neural radiance fields. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 5470–5479, 2022
2022
-
[4]
Cen, J., Zhou, X., Fang, J., Wen, C., Xie, L., Zhang, X., Shen, W., and Tian, Q. Tackling view-dependent semantics in 3d language gaussian splatting.arXiv preprint arXiv:2505.24746, 2025
-
[5]
Pgsr: Planar-based gaussian splatting for efficient and high- fidelity surface reconstruction.IEEE Transactions on Visualization and Computer Graphics, 2024
Chen, D., Li, H., Ye, W., Wang, Y ., Xie, W., Zhai, S., Wang, N., Liu, H., Bao, H., and Zhang, G. Pgsr: Planar-based gaussian splatting for efficient and high- fidelity surface reconstruction.IEEE Transactions on Visualization and Computer Graphics, 2024
2024
-
[6]
Periodic vibration gaussian: Dynamic urban scene reconstruction and real-time rendering.International Journal of Computer Vision, 134(3):83, 2026
Chen, Y ., Gu, C., Jiang, J., Zhu, X., and Zhang, L. Periodic vibration gaussian: Dynamic urban scene reconstruction and real-time rendering.International Journal of Computer Vision, 134(3):83, 2026
2026
-
[7]
Gaussianpro: 3d gaussian splatting with progressive propagation
Cheng, K., Long, X., Yang, K., Yao, Y ., Yin, W., Ma, Y ., Wang, W., and Chen, X. Gaussianpro: 3d gaussian splatting with progressive propagation. InForty-first International Conference on Machine Learning, 2024
2024
-
[8]
Chung, J., Oh, J., and Lee, K. M. Depth-regularized optimization for 3d gaussian splatting in few-shot im- ages. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 811– 820, 2024
2024
-
[9]
Streetsurfgs: Scalable urban street surface reconstruction with planar-based gaussian splatting
Cui, X., Ye, W., Wang, Y ., Zhang, G., Zhou, W., He, T., and Li, H. Streetsurfgs: Scalable urban street surface reconstruction with planar-based gaussian splatting. IEEE Transactions on Circuits and Systems for Video Technology, 2025
2025
-
[10]
Nerf is a valuable assistant for 3d gaussian splatting
Fang, S., Shen, I., Igarashi, T., Wang, Y ., Wang, Z., Yang, Y ., Ding, W., Zhou, S., et al. Nerf is a valuable assistant for 3d gaussian splatting. InProceedings of the IEEE/CVF International Conference on Computer Vision, pp. 26230–26240, 2025
2025
-
[11]
Felzenszwalb, P. F. and Huttenlocher, D. P. Distance transforms of sampled functions.Theory of Comput- ing, 8(1):415–428, sep 2012
2012
-
[12]
B., Fahmy, A., Song, R., Cremers, D., and Meess, H
Gross, M., Matha, S. B., Fahmy, A., Song, R., Cremers, D., and Meess, H. Occufly: A 3d vision benchmark for semantic scene completion from the aerial perspec- tive. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026
2026
-
[13]
and Lepetit, V
Gu´edon, A. and Lepetit, V . Sugar: Surface-aligned gaussian splatting for efficient 3d mesh reconstruction and high-quality mesh rendering. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 5354–5363, 2024
2024
-
[14]
Guo, J., Deng, N., Li, X., Bai, Y ., Shi, B., Wang, C., Ding, C., Wang, D., and Li, Y . Streetsurf: Extending multi-view implicit surface reconstruction to street views.arXiv preprint arXiv:2306.04988, 2023
-
[15]
Refersplat: Referring segmentation in 3d gaussian splatting.arXiv preprint arXiv:2508.08252, 2025
He, S., Jie, G., Wang, C., Zhou, Y ., Hu, S., Li, G., and Ding, H. Refersplat: Referring segmentation in 3d gaussian splatting.arXiv preprint arXiv:2508.08252, 2025
-
[16]
Splatad: Real-time lidar and camera rendering with 3d gaussian splatting for autonomous driving
Hess, G., Lindstr ¨om, C., Fatemi, M., Petersson, C., and Svensson, L. Splatad: Real-time lidar and camera rendering with 3d gaussian splatting for autonomous driving. InProceedings of the Computer Vision and Pattern Recognition Conference, pp. 11982–11992, 2025
2025
-
[17]
arXiv preprint arXiv:2410.22128 (2024) 3
Hong, S., Jung, J., Shin, H., Han, J., Yang, J., Luo, C., and Kim, S. Pf3plat: Pose-free feed-forward 3d gaussian splatting.arXiv preprint arXiv:2410.22128, 2024
-
[18]
Hu, P. and Han, Z. Vtgaussian-slam: Rgbd slam for large scale scenes with splatting view-tied 3d gaus- sians.arXiv preprint arXiv:2506.02741, 2025
-
[19]
2d gaussian splatting for geometrically accurate radi- ance fields
Huang, B., Yu, Z., Chen, A., Geiger, A., and Gao, S. 2d gaussian splatting for geometrically accurate radi- ance fields. InSIGGRAPH 2024 Conference Papers. Association for Computing Machinery, 2024. doi: 10.1145/3641519.3657428
-
[20]
Fatesgs: Fast and accurate sparse-view surface reconstruction using gaussian splatting with depth-feature consistency
Huang, H., Wu, Y ., Deng, C., Gao, G., Gu, M., and Liu, Y .-S. Fatesgs: Fast and accurate sparse-view surface reconstruction using gaussian splatting with depth-feature consistency. InProceedings of the AAAI Conference on Artificial Intelligence, volume 39, pp. 3644–3652, 2025
2025
-
[21]
S3gaussian: Self-supervised street gaussians for 9 EnerGS: Energy-Based Gaussian Splatting with Partial Geometric Priors autonomous driving
Huang, N., Wei, X., Zheng, W., An, P., Lu, M., Zhan, W., Tomizuka, M., Keutzer, K., and Zhang, S. S3gaussian: Self-supervised street gaussians for 9 EnerGS: Energy-Based Gaussian Splatting with Partial Geometric Priors autonomous driving. InProceedings of the IEEE In- ternational Conference on Robotics and Automation (ICRA), 2026
2026
-
[22]
Huang, Z., Xu, M., and Perry, S. Det-gs: Depth-and edge-aware regularization for high-fidelity 3d gaussian splatting.arXiv preprint arXiv:2508.04099, 2025
-
[23]
Li-gs: Gaussian splatting with lidar incorporated for accurate large-scale reconstruction
Jiang, C., Gao, R., Shao, K., Wang, Y ., Xiong, R., and Zhang, Y . Li-gs: Gaussian splatting with lidar incorporated for accurate large-scale reconstruction. IEEE Robotics and Automation Letters, 2024
2024
-
[24]
3d gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics, 42(4), July 2023
Kerbl, B., Kopanas, G., Leimk¨uhler, T., and Drettakis, G. 3d gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics, 42(4), July 2023. URL https://repo-sam.inria. fr/fungraph/3d-gaussian-splatting/
2023
-
[25]
Lee, J., Kong, M., Park, M., and Kim, E. Geomgs: Lidar-guided geometry-aware gaussian splatting for robot localization.arXiv preprint arXiv:2501.13417, 2025
-
[26]
Ms-gs: Multi-appearance sparse-view 3d gaussian splatting in the wild
Li, D., Jiang, K., Tang, Y ., Ramamoorthi, R., Chel- lappa, R., and Peng, C. Ms-gs: Multi-appearance sparse-view 3d gaussian splatting in the wild. InThe Thirty-ninth Annual Conference on Neural Informa- tion Processing Systems, 2025
2025
-
[27]
Dngaussian: Optimizing sparse-view 3d gaussian radiance fields with global-local depth normalization
Li, J., Zhang, J., Bai, X., Zheng, J., Ning, X., Zhou, J., and Gu, L. Dngaussian: Optimizing sparse-view 3d gaussian radiance fields with global-local depth normalization. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pp. 20775–20785, 2024
2024
-
[28]
H., and Tombari, F
Li, Y ., Lyu, C., Di, Y ., Zhai, G., Lee, G. H., and Tombari, F. Geogaussian: Geometry-aware gaussian splatting for scene rendering. InEuropean conference on computer vision, pp. 441–457. Springer, 2024
2024
-
[29]
Scaffold-gs: Structured 3d gaussians for view-adaptive rendering
Lu, T., Yu, M., Xu, L., Xiangli, Y ., Wang, L., Lin, D., and Dai, B. Scaffold-gs: Structured 3d gaussians for view-adaptive rendering. InProceedings of the IEEE/CVF Conference on Computer Vision and Pat- tern Recognition, pp. 20654–20664, 2024
2024
-
[30]
S., Goel, R., Kerbl, B., Steinberger, M., Carrasco, F
Mallick, S. S., Goel, R., Kerbl, B., Steinberger, M., Carrasco, F. V ., and De La Torre, F. Taming 3dgs: High-quality radiance fields with limited resources. In SIGGRAPH Asia 2024 Conference Papers, pp. 1–11, 2024
2024
-
[31]
Evolsplat: Effi- cient volume-based gaussian splatting for urban view synthesis
Miao, S., Huang, J., Bai, D., Yan, X., Zhou, H., Wang, Y ., Liu, B., Geiger, A., and Liao, Y . Evolsplat: Effi- cient volume-based gaussian splatting for urban view synthesis. InProceedings of the Computer Vision and Pattern Recognition Conference, pp. 11286–11296, 2025
2025
-
[32]
P., Tancik, M., Barron, J
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T., Ramamoorthi, R., and Ng, R. Nerf: Representing scenes as neural radiance fields for view synthesis. Communications of the ACM, 65(1):99–106, 2021
2021
-
[33]
Lidar-enhanced 3d gaussian splatting mapping.arXiv preprint arXiv:2503.05425, 2025
Shen, J., Yu, H., Wu, J., Yang, W., and Xia, G.-S. Lidar-enhanced 3d gaussian splatting mapping.arXiv preprint arXiv:2503.05425, 2025
-
[34]
Coda-4dgs: Dy- namic gaussian splatting with context and deformation awareness for autonomous driving
Song, R., Liang, C., Xia, Y ., Zimmer, W., Cao, H., Caesar, H., Festag, A., and Knoll, A. Coda-4dgs: Dy- namic gaussian splatting with context and deformation awareness for autonomous driving. InProceedings of the IEEE/CVF International Conference on Computer Vision, pp. 28031–28041, 2025
2025
-
[35]
Scalability in perception for autonomous driving: Waymo open dataset
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Patnaik, V ., Tsui, P., Guo, J., Zhou, Y ., Chai, Y ., Caine, B., et al. Scalability in perception for autonomous driving: Waymo open dataset. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 2446–2454, 2020
2020
-
[36]
Dn-splatter: Depth and normal priors for gaussian splatting and meshing
Turkulainen, M., Ren, X., Melekhov, I., Seiskari, O., Rahtu, E., and Kannala, J. Dn-splatter: Depth and normal priors for gaussian splatting and meshing. In 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), pp. 2421–2431. IEEE, 2025
2025
-
[37]
V oigtlaender, P., Krause, M., Osep, A., Luiten, J., Sekar, B. B. G., Geiger, A., and Leibe, B. Mots: Multi- object tracking and segmentation. InConference on Computer Vision and Pattern Recognition (CVPR), 2019
2019
-
[38]
Generative ai for autonomous driving: Frontiers and opportunities
Wang, Y ., Xing, S., Can, C., Li, R., Hua, H., Tian, K., Mo, Z., Gao, X., Wu, K., Zhou, S., et al. Generative ai for autonomous driving: Frontiers and opportunities. arXiv preprint arXiv:2505.08854, 2025
-
[39]
4d gaussian splatting for real-time dynamic scene rendering
Wu, G., Yi, T., Fang, J., Xie, L., Zhang, X., Wei, W., Liu, W., Tian, Q., and Wang, X. 4d gaussian splatting for real-time dynamic scene rendering. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 20310–20320, 2024
2024
-
[40]
Xia, K., Jia, J., Jin, K., Bai, Y ., Sun, L., Tao, D., and Zhang, Y . D2gs: Dense depth regularization for lidar-free urban scene reconstruction.arXiv preprint arXiv:2510.25173, 2025
-
[41]
Depthsplat: Connecting gaussian splatting and depth
Xu, H., Peng, S., Wang, F., Blum, H., Barath, D., Geiger, A., and Pollefeys, M. Depthsplat: Connecting gaussian splatting and depth. InProceedings of the 10 EnerGS: Energy-Based Gaussian Splatting with Partial Geometric Priors Computer Vision and Pattern Recognition Conference, pp. 16453–16463, 2025
2025
-
[42]
Ad-gs: Object-aware b-spline gaussian splatting for self-supervised autonomous driving
Xu, J., Deng, K., Fan, Z., Wang, S., Xie, J., and Yang, J. Ad-gs: Object-aware b-spline gaussian splatting for self-supervised autonomous driving. InProceedings of the IEEE/CVF International Conference on Computer Vision, pp. 24770–24779, 2025
2025
-
[43]
Street gaussians: Modeling dynamic urban scenes with gaussian splat- ting
Yan, Y ., Lin, H., Zhou, C., Wang, W., Sun, H., Zhan, K., Lang, X., Zhou, X., and Peng, S. Street gaussians: Modeling dynamic urban scenes with gaussian splat- ting. InEuropean Conference on Computer Vision, pp. 156–173. Springer, 2024
2024
-
[44]
Yang, J., Huang, J., Chen, Y ., Wang, Y ., Li, B., You, Y ., Sharma, A., Igl, M., Karkus, P., Xu, D., et al. Storm: Spatio-temporal reconstruction model for large-scale outdoor scenes.arXiv preprint arXiv:2501.00602, 2024
-
[45]
Yang, Q., Yang, L., Van Der Auwera, G., and Li, Z. Hybridgs: High-efficiency gaussian splatting data com- pression using dual-channel sparse representation and point cloud encoder.arXiv preprint arXiv:2505.01938, 2025
-
[46]
Mip-splatting: Alias-free 3d gaussian splatting
Yu, Z., Chen, A., Huang, B., Sattler, T., and Geiger, A. Mip-splatting: Alias-free 3d gaussian splatting. InProceedings of the IEEE/CVF conference on com- puter vision and pattern recognition, pp. 19447–19456, 2024
2024
-
[47]
Nerf++: Analyzing and improving neural radiance fields
Zhang, K., Riegler, G., Snavely, N., and Koltun, V . Nerf++: Analyzing and improving neural radiance fields.arXiv preprint arXiv:2010.07492, 2020
-
[48]
Gs-lrm: Large reconstruc- tion model for 3d gaussian splatting
Zhang, K., Bi, S., Tan, H., Xiangli, Y ., Zhao, N., Sunkavalli, K., and Xu, Z. Gs-lrm: Large reconstruc- tion model for 3d gaussian splatting. InEuropean Conference on Computer Vision, pp. 1–19. Springer, 2024
2024
-
[49]
Zhang, Q., Wysocki, O., Urban, S., and Jutzi, B. Cdgs: Confidence-aware depth regularization for 3d gaussian splatting.arXiv preprint arXiv:2502.14684, 2025
- [50]
-
[51]
Drivinggaussian: Composite gaussian splatting for surrounding dynamic autonomous driving scenes
Zhou, X., Lin, Z., Shan, X., Wang, Y ., Sun, D., and Yang, M.-H. Drivinggaussian: Composite gaussian splatting for surrounding dynamic autonomous driving scenes. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 21634– 21643, 2024
2024
-
[52]
blue holes
Zhou, Z., Xiang, H., Zheng, Z., Zhao, S. Z., Lei, M., Zhang, Y ., Cai, T., Liu, X., Liu, J., Bajji, M., et al. V2xpnp: Vehicle-to-everything spatio-temporal fusion for multi-agent perception and prediction. InProceed- ings of the IEEE/CVF International Conference on Computer Vision, pp. 25399–25409, 2025. 11 EnerGS: Energy-Based Gaussian Splatting with Pa...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.