Distributed Algorithm with Emergent Area Partitioning and Base Station's Situation Awareness for Multi-Robot Patrolling
Pith reviewed 2026-05-09 14:10 UTC · model grok-4.3
The pith
A local utility rule lets robot teams divide patrol areas automatically while keeping the base station updated on progress.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
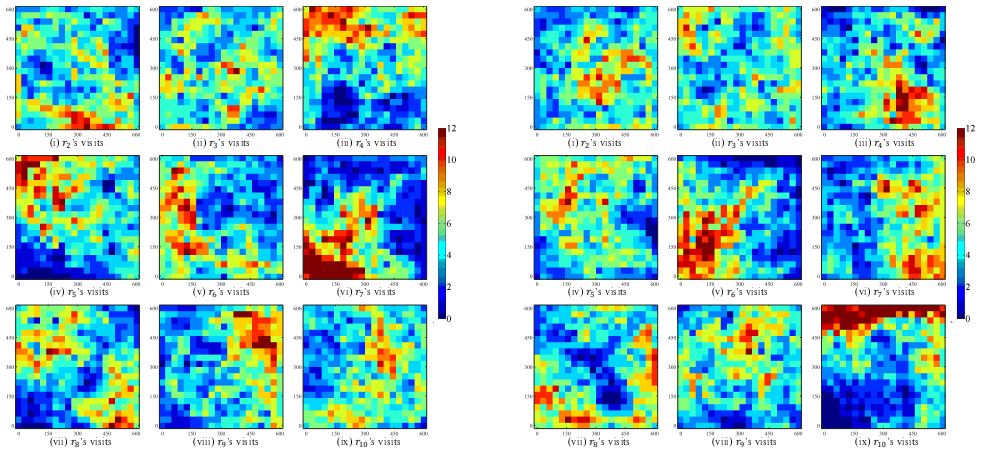
The LR-PT algorithm lets robots select patrol targets from local data alone by means of a unified utility function that combines the requirement for frequent visits to every location with the need to report mission progress to the base station. The resulting behavior spontaneously partitions the area so that the whole mission space receives regular coverage without central direction, while the base station receives timely status updates that improve its awareness of robot locations and overall progress.
What carries the argument
The unified utility function each robot computes from local information to score and choose its next patrol target, integrating visit frequency needs with reporting urgency.
If this is right
- Every location of interest receives frequent patrols without central coordination.
- The base station obtains improved situation awareness that supports prediction and emergency actions.
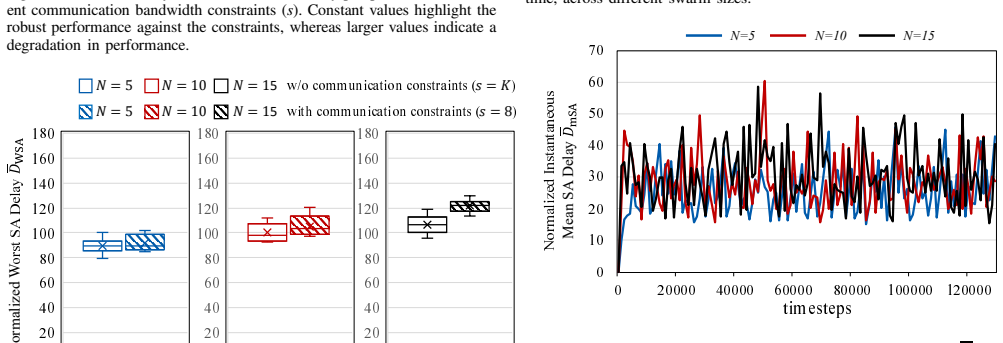
- Performance holds under communication limits and robot failures because decisions stay local.
- The emergent partition prevents the team from settling into suboptimal local coverage patterns.
Where Pith is reading between the lines
- The same local selection rule could be tested in dynamic environments where new points of interest appear during a mission.
- Larger teams might maintain coverage without extra communication overhead because each robot still decides from its immediate surroundings.
- Operators could reduce detailed pre-mission mapping if the utility rule reliably produces balanced partitions in varied layouts.
Load-bearing premise
That local information combined in one utility score will reliably drive robots to spread across the entire area rather than cluster or leave gaps.
What would settle it
A simulation run on a large map with sparse robots in which one or more distant locations remain unpatrolled for long stretches even though nearby robots have local data on patrol needs.
Figures















read the original abstract
Patrolling with multiple robots offers efficient surveillance to detect and manage undesired situations. This necessitates improved patrol efficiency and operator situation awareness at base stations. Enhanced situation awareness enables operators to predict robots' behaviors, support recognition and decision-making, and execute emergency interventions. This study presents the Local Reactive and Partition (LR-PT) algorithm, a novel multi-robot patrolling approach. In simulations, LR-PT outperformed existing methods by ensuring frequent patrols of all locations of interest and enhancing the situation awareness of the base station. Robots independently select patrol targets based on locally available information, integrating patrol needs and the urgency of reporting mission progress to the base station into a unified utility function. This locality also contributes to robustness against communication constraints and robot failures, as demonstrated in this research. The algorithm further autonomously emerged the area partition, which can avoid falling into local optima and realize the comprehensive patrol over the whole mission area. The simulation results demonstrated the superior performance of LR-PT for multi-robot patrolling, utilizing the advantages of swarm robotics and addressing real-world operational challenges.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the LR-PT algorithm for multi-robot patrolling. Robots independently select patrol targets via a unified local utility function that combines patrol needs with urgency of reporting mission progress to the base station. This produces emergent area partitioning that avoids local optima and achieves comprehensive coverage. Simulations claim that LR-PT outperforms existing methods in patrol frequency of all locations of interest, base-station situation awareness, and robustness to communication constraints and robot failures.
Significance. If the simulation results and emergent behavior generalize, the work would contribute a lightweight decentralized coordination rule for multi-robot surveillance that simultaneously improves operator awareness, a practical concern in real deployments. The locality of decisions is a potential strength for scalability and fault tolerance. However, the absence of analytical support or reproducible experimental protocols currently limits the result to a case-specific demonstration rather than a general method.
major comments (3)
- [Abstract and §3] Abstract and §3 (Algorithm): The central claim that a single local utility function produces stable emergent area partitioning that 'avoids falling into local optima' is asserted without any equation defining the utility, any pseudocode for target selection, or any convergence argument. The description remains qualitative, so it is impossible to assess whether the dynamics are guaranteed to escape suboptimal partitions or merely succeed in the tested maps.
- [Simulation Experiments] Simulation section: The assertion that LR-PT 'outperformed existing methods' provides no identification of the baseline algorithms, no definition of the quantitative metrics (patrol frequency, coverage completeness, awareness score), no number of independent trials, no statistical tests, and no description of the environment (map size, obstacle density, communication model, failure rates). Without these details the performance claim cannot be evaluated or reproduced.
- [Robustness and Failure Handling] Robustness claims (Abstract and §4): Statements that the algorithm is robust to communication constraints and robot failures rest entirely on unspecified simulation scenarios. No additional stress tests, sensitivity analysis, or formal argument showing that the local rule remains effective when messages are lost or robots disappear are supplied, leaving the robustness assertion unsupported beyond the particular runs shown.
minor comments (2)
- [Abstract] The acronym LR-PT is used before it is expanded; provide the full name at first occurrence.
- [Figures] Figure captions should explicitly state the number of robots, map dimensions, and communication range used in each plotted scenario.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which highlights areas where the manuscript can be strengthened for clarity and reproducibility. We address each major comment point by point below, agreeing to revisions that add the requested details and clarifications without altering the core contributions.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (Algorithm): The central claim that a single local utility function produces stable emergent area partitioning that 'avoids falling into local optima' is asserted without any equation defining the utility, any pseudocode for target selection, or any convergence argument. The description remains qualitative, so it is impossible to assess whether the dynamics are guaranteed to escape suboptimal partitions or merely succeed in the tested maps.
Authors: We agree that §3 would benefit from greater formality. In the revised manuscript we will insert the explicit mathematical definition of the unified local utility function (combining patrol urgency and reporting priority terms), provide pseudocode for the target selection loop, and add a dedicated paragraph analyzing the escape mechanism from local optima via the emergent partitioning dynamics. A full convergence proof is not feasible within the current scope, but the added discussion will be grounded in the observed simulation behaviors. revision: yes
-
Referee: [Simulation Experiments] Simulation section: The assertion that LR-PT 'outperformed existing methods' provides no identification of the baseline algorithms, no definition of the quantitative metrics (patrol frequency, coverage completeness, awareness score), no number of independent trials, no statistical tests, and no description of the environment (map size, obstacle density, communication model, failure rates). Without these details the performance claim cannot be evaluated or reproduced.
Authors: We acknowledge the omission of these experimental details. The revised version will explicitly name the baseline algorithms, supply formal definitions and formulas for patrol frequency, coverage completeness, and base-station awareness score, report the number of independent trials performed, include appropriate statistical tests, and fully specify the simulation environments (map dimensions, obstacle densities, communication range and loss model, and failure rates). revision: yes
-
Referee: [Robustness and Failure Handling] Robustness claims (Abstract and §4): Statements that the algorithm is robust to communication constraints and robot failures rest entirely on unspecified simulation scenarios. No additional stress tests, sensitivity analysis, or formal argument showing that the local rule remains effective when messages are lost or robots disappear are supplied, leaving the robustness assertion unsupported beyond the particular runs shown.
Authors: We accept that the robustness section requires expansion. We will augment §4 with precise descriptions of the tested communication-constraint and failure scenarios, add sensitivity plots varying message-loss probability and number of failed robots, and include a short discussion explaining why the purely local decision rule confers inherent tolerance to these disruptions. A formal robustness proof is outside the paper's scope, but the additional empirical evidence will be provided. revision: partial
Circularity Check
No mathematical derivation chain present to inspect for circularity
full rationale
The provided manuscript text consists entirely of high-level algorithmic descriptions and simulation-based claims without any equations, formal derivations, parameter fittings, or self-citations that could form a load-bearing chain. The central mechanism (local utility function producing emergent partitioning) is asserted via textual description and empirical results rather than a mathematical reduction that could be equivalent to its inputs by construction. No instances of self-definitional constructs, fitted inputs renamed as predictions, or ansatz smuggling appear.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Robots have access to locally available information about patrol needs and can communicate progress to the base station under constraints.
Reference graph
Works this paper leans on
-
[1]
LSAR: Mult i-UA V Collaboration for Search and Rescue Missions,
E. T. Alotaibi, S. S. Alqefari, and A. Koubaa, “LSAR: Mult i-UA V Collaboration for Search and Rescue Missions,” IEEE Access , vol. 7, pp. 55 817–55 832, 2019
work page 2019
-
[2]
Swarm robotics: From sources of inspiration t o domains of application,
E. Sahin, “Swarm robotics: From sources of inspiration t o domains of application,” Swarm Robotics , pp. 10–20, 2005
work page 2005
-
[3]
Swa rm Robotic Behaviors and Current Applications,
M. Schranz, M. Umlauft, M. Sende, and W. Elmenreich, “Swa rm Robotic Behaviors and Current Applications,” Frontiers in Robotics and AI , vol. 7, no. 36, 2020
work page 2020
-
[4]
D. Carrillo-Zapata, E. Milner, J. Hird, G. Tzoumas, P . J. V ardanega, M. Sooriyabandara, M. Giuliani, A. F. Winfield, and S. Hauert , “Mutual Shaping in Swarm Robotics: User Studies in Fire and R escue, Storage Organization, and Bridge Inspection,” Frontiers in Robotics and AI , vol. 7, no. 53, apr 2020
work page 2020
-
[5]
Disaster Rescue via M ulti- Robot Collaboration: Development, Control, and Deploymen t,
Y . Watanobe, R. Kabir, R. Aoba, A. Ohashi, S. Ogata, M. Shi ga, K. Tsuruno, T. Anazawa, and K. Naruse, “Disaster Rescue via M ulti- Robot Collaboration: Development, Control, and Deploymen t,” J. Robot. Mechatron., vol. 35, no. 1, pp. 85–98, 2023
work page 2023
-
[6]
M. Pillai, J. Suthakorn, D. Sivaraman, S. Nakdhamabhorn , N. Nil- lahoot, S. Ongwattanakul, F. Matsuno, M. Svinin, and M. Evge ni, “A heterogeneous robots collaboration for safety, securit y, and rescue robotics: e-asia joint research program for disaster risk a nd reduction management,” Advanced Robotics , pp. 1–23, 2024
work page 2024
-
[7]
Design and Evaluation for Situation Awar eness Enhancement,
M. R. Endsley, “Design and Evaluation for Situation Awar eness Enhancement,” Proceedings of the Human Factors Society Annual Meeting, vol. 32, no. 2, pp. 97–101, oct 1988
work page 1988
-
[8]
Hu- man Interaction With Robot Swarms: A Survey,
A. Kolling, P . Walker, N. Chakraborty, K. Sycara, and M. L ewis, “Hu- man Interaction With Robot Swarms: A Survey,” IEEE Transactions on Human-Machine Systems , vol. 46, no. 1, pp. 9–26, 2016
work page 2016
-
[9]
K. Kobayashi, S. Ueno, and T. Higuchi, “Multi-robot patr ol algorithm with distributed coordination and consciousness of the bas e station’s situation awareness,” https://doi.org/10.48550/arXiv.2307.08966, 2023
-
[10]
M ulti-agent Patrolling: An Empirical Analysis of Alternative Architec tures,
A. Machado, G. Ramalho, J.-D. Zucker, and A. Drogoul, “M ulti-agent Patrolling: An Empirical Analysis of Alternative Architec tures,” in Multi-Agent-Based Simulation II , 2003, pp. 155–170
work page 2003
-
[11]
Theo retical study of ant-based algorithms for multi-agent patrolling,
A. Glad, O. Simonin, O. Buffet, and F. Charpillet, “Theo retical study of ant-based algorithms for multi-agent patrolling, ” Frontiers in Artificial Intelligence and Applications , vol. 178, pp. 626–630, 2008
work page 2008
-
[12]
Self -organization of patrolling-ant algorithms,
A. Glad, O. Buffet, O. Simonin, and F. Charpillet, “Self -organization of patrolling-ant algorithms,” 3rd IEEE International Conference on Self-Adaptive and Self-Organizing Systems , pp. 61–70, 2009
work page 2009
-
[13]
Distributed multi-robot p atrol: A scalable and fault-tolerant framework,
D. Portugal and R. P . Rocha, “Distributed multi-robot p atrol: A scalable and fault-tolerant framework,” Robotics and Autonomous Systems, vol. 61, no. 12, pp. 1572–1587, 2013
work page 2013
-
[14]
Cooperative multi-robot patrol with Bayesian lea rning,
——, “Cooperative multi-robot patrol with Bayesian lea rning,” Au- tonomous Robots , vol. 40, no. 5, pp. 929–953, 2016
work page 2016
-
[15]
Path Generation with LSTM Recurrent Neural Networks in the Con- text of the Multi-Agent Patrolling,
M. Othmani-Guibourg, A. El Fallah-Seghrouchni, and J. -L. Farges, “Path Generation with LSTM Recurrent Neural Networks in the Con- text of the Multi-Agent Patrolling,” in 2018 IEEE 30th International Conference on Tools with Artificial Intelligence (ICTAI) , 2018, pp. 430–437
work page 2018
-
[16]
LSTM Path-Maker: a new LSTM-based strategy for the multi- agent patrolling,
——, “LSTM Path-Maker: a new LSTM-based strategy for the multi- agent patrolling,” in 52nd Annual Hawaii International Conference on System Sciences (HICSS 2019) , 2019, pp. 616–625
work page 2019
-
[17]
Multi-robot patrol: A distributed algorithm based on expected idleness,
C. Y an and T. Zhang, “Multi-robot patrol: A distributed algorithm based on expected idleness,” International Journal of Advanced Robotic Systems , vol. 13, no. 6, pp. 1–12, nov 2016
work page 2016
-
[18]
Cooperative p atrol plan- ning of multi-robot systems by a competitive auction system ,
K.-S. Hwang, J.-L. Lin, and H.-L. Huang, “Cooperative p atrol plan- ning of multi-robot systems by a competitive auction system ,” in 2009 ICCAS-SICE, 2009, pp. 4359–4363
work page 2009
-
[19]
Performance B ased Task Assignment in Multi-Robot Patrolling,
C. Pippin, H. Christensen, and L. Weiss, “Performance B ased Task Assignment in Multi-Robot Patrolling,” in Proceedings of the 28th Annual ACM Symposium on Applied Computing , ser. SAC ’13. As- sociation for Computing Machinery, 2013, pp. 70–76
work page 2013
-
[20]
Distributed on- line dynamic task assignment for multi-robot patrolling,
A. Farinelli, L. Iocchi, and D. Nardi, “Distributed on- line dynamic task assignment for multi-robot patrolling,” Autonomous Robots , vol. 41, no. 6, pp. 1321–1345, 2017
work page 2017
-
[21]
T. Sato, K. Sakamoto, T. Maeda, Y . Kunii, T. Toda, and H. K ato, “Probabilistic presence density control for areal wide-ar ea distributed exploration with swarm robots,” Journal of the Robotics Society of Japan, vol. 41, no. 10, pp. 869–880, 2023
work page 2023
-
[22]
J. Scherer and B. Rinner, “Short and full horizon motion planning for persistent multi-UA V surveillance with energy and comm unication constraints,” in 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2017, pp. 230–235
work page 2017
-
[23]
Multi-UA V Surveillance With Minimum Information Idleness and Latency Constraints,
——, “Multi-UA V Surveillance With Minimum Information Idleness and Latency Constraints,” IEEE Robotics and Automation Letters , vol. 5, no. 3, pp. 4812–4819, 2020
work page 2020
-
[24]
Persistent multi-UA V surveillance with energy an d commu- nication constraints,
——, “Persistent multi-UA V surveillance with energy an d commu- nication constraints,” in 2016 IEEE International Conference on Automation Science and Engineering (CASE) , 2016, pp. 1225–1230
work page 2016
-
[25]
Multi-Robot Persistent Surveillance With Connec tivity Con- straints,
——, “Multi-Robot Persistent Surveillance With Connec tivity Con- straints,” IEEE Access , vol. 8, pp. 15 093–15 109, 2020
work page 2020
-
[26]
Minimizing commu nication latency in multirobot situation-aware patrolling,
J. Banfi, N. Basilico, and F. Amigoni, “Minimizing commu nication latency in multirobot situation-aware patrolling,” in 2015 IEEE/RSJ International Conference on Intelligent Robots and System s (IROS) , 2015, pp. 616–622
work page 2015
-
[27]
Multirobot Explo ration of Communication-Restricted Environments: A Survey,
F. Amigoni, J. Banfi, and N. Basilico, “Multirobot Explo ration of Communication-Restricted Environments: A Survey,” IEEE Intelligent Systems, vol. 32, no. 6, pp. 48–57, 2017
work page 2017
-
[28]
Decentralized simultaneous multi-target exploration us ing a con- nected network of multiple robots,
T. Nestmeyer, P . Robuffo Giordano, H. H. B¨ ulthoff, and A. Franchi, “Decentralized simultaneous multi-target exploration us ing a con- nected network of multiple robots,” Autonomous Robots, vol. 41, no. 4, pp. 989–1011, 2017
work page 2017
-
[29]
Leveraging connectivity for coverage in dr one networks for target detection,
E. Y . Adam, “Leveraging connectivity for coverage in dr one networks for target detection,” Balkan Journal of Electrical and Computer Engineering, vol. 7, no. 3, pp. 218–225, 2019
work page 2019
-
[30]
K. Kobayashi, S. Ueno, and T. Higuchi, “Multi-robot pat rol with continuous connectivity and assessment of base station sit uation awareness,” Journal of Robotics and Mechatronics , vol. 36, no. 3, pp. 526–537, 2024
work page 2024
-
[31]
Hierarchical Distr ibuted Control for Global Network Integrity Preservation in Multi robot Systems,
P . D. Hung, T. Q. Vinh, and T. D. Ngo, “Hierarchical Distr ibuted Control for Global Network Integrity Preservation in Multi robot Systems,” IEEE Transactions on Cybernetics, vol. 50, no. 3, pp. 1278– 1291, 2020
work page 2020
-
[32]
Bi-connectivity control f or multi- robot network considering line-of-sight communication,
T. Murayama and A. Iwasaki, “Bi-connectivity control f or multi- robot network considering line-of-sight communication,” Journal of Robotics and Mechatronics , vol. 35, no. 4, pp. 1028–1037, 2023
work page 2023
-
[33]
Decentral ized navi- gation and collision avoidance for robotic swarm with heter ogeneous abilities,
Y . Sano, T. Endo, T. Shibuya, and F. Matsuno, “Decentral ized navi- gation and collision avoidance for robotic swarm with heter ogeneous abilities,” Advanced Robotics , vol. 37, no. 1-2, pp. 25–36, jan 2023
work page 2023
-
[34]
A. Caregnato-Neto, M. R. O. A. Maximo, and R. J. M. Afonso , “Real- time motion planning and decision-making for a group of diff erential drive robots under connectivity constraints using robust M PC and mixed-integer programming,” Advanced Robotics , vol. 37, no. 5, pp. 356–379, 2023
work page 2023
-
[35]
Performance met ric for base station situational awareness in robotic swarm patrolling ,
K. Kobayashi, T. Higuchi, and S. Ueno, “Performance met ric for base station situational awareness in robotic swarm patrolling ,” The Pro- ceedings of JSME annual Conference on Robotics and Mechatro nics (Robomec), vol. 2023, pp. 1P1–G01, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.