Recognition: unknown
Creative Robot Tool Use by Counterfactual Reasoning
Pith reviewed 2026-05-08 16:08 UTC · model grok-4.3
The pith
A causal reasoning framework enables robots to select creative tools by identifying key physical features through simulated counterfactual experiments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
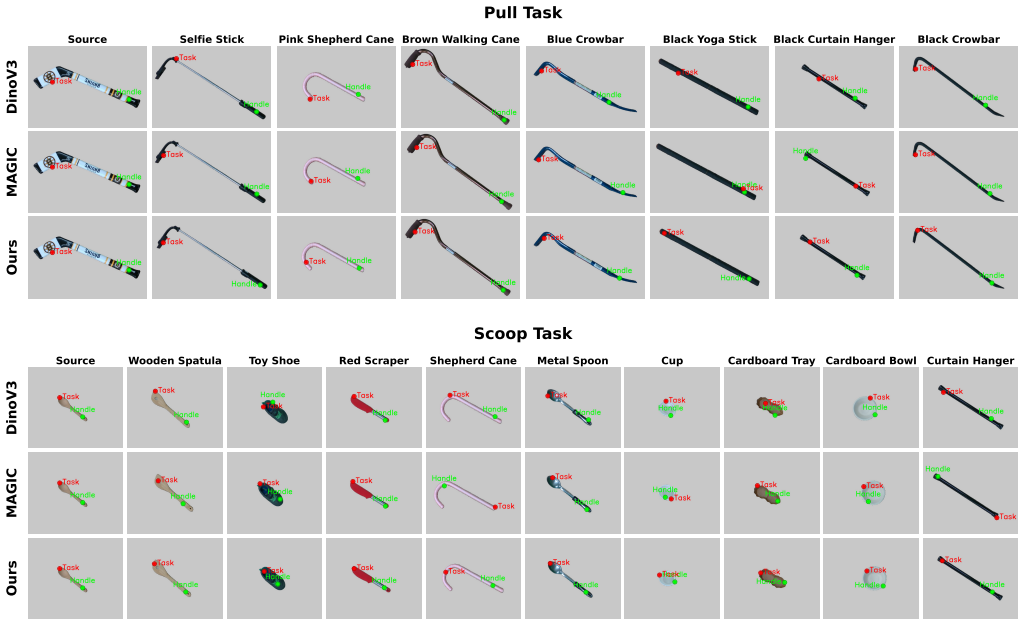
The paper's central discovery is a framework for creative robot tool use that discovers causal relationships by conducting simulated experiments: a vision-language model proposes potential features of the tool, which are then perturbed to generate counterfactual tools whose effects on the task are evaluated in a dynamics model. Novel objects are classified using these causal features, and the tool-use skill is transferred by matching keypoints conditioned on the features. This physics-grounded approach is shown to yield more reliable tool selection and improved skill transfer in examples like using sticks to reach objects, scooping with various items, and stepping on boxes.
What carries the argument
The causal discovery mechanism that uses a vision-language model to suggest features and then generates counterfactual tools by perturbing those features in a dynamics simulator.
If this is right
- Identifying causal features leads to more reliable tool selection for tasks beyond a tool's primary design.
- Conditioning keypoint matching on causal features produces stronger transfer of manipulation skills to novel objects.
- Reconstructing the task in a dynamics model grounds decisions in physical properties, supporting use across diverse items.
- Baseline comparisons confirm gains in both tool selection accuracy and skill transfer performance.
Where Pith is reading between the lines
- The simulation-based discovery process could allow safer testing of risky tool interactions without real-world trials.
- This causal focus might extend to other improvisation scenarios where robots must repurpose household objects on the fly.
- If the identified features prove robust, the method could lower the amount of real-world data needed for learning new tool behaviors.
Load-bearing premise
The dynamics model used for simulated experiments accurately captures the relevant physics of real-world tool-object interactions so that causal features discovered in simulation transfer to physical execution.
What would settle it
A physical robot trial on scooping candies or reaching with a stick, where tools selected via simulation-identified causal features fail to work due to unmodeled effects such as unexpected friction or deformation.
Figures










read the original abstract
We propose a causal reasoning framework for creative robot tool use where a suitable tool for a task is correctly identified for use beyond its primary objectives. The proposed framework first discovers the causal relationships between the tool and the task by conducting simulated experiments in a dynamics model. We decouple the causal discovery problem into two complementary components: VLM-based feature suggestion and counterfactual tool generation via targeted geometric and physical feature perturbations. Then, novel objects are classified based on identified causal features, and the tool use skill is transferred via keypoint matching conditioned on the identified causal features. By reconstructing the task in a dynamics model, our approach grounds tool use in the physics of the problem. We illustrate our approach in reaching a distant object with different sticks, scooping candies from a bowl using diverse items, and using different boxes or crates as stepping platforms to retrieve an object from a high shelf. Our baseline comparisons show that identifying causal features and grounding them in physical tool properties leads to more reliable tool selection and stronger skill keypoint transfer.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a causal reasoning framework for creative robot tool use. It discovers causal tool-task relationships by running simulated experiments in a dynamics model, using VLM-based feature suggestion combined with counterfactual perturbations of geometric and physical properties. Novel objects are then classified according to the identified causal features, and tool-use skills are transferred via keypoint matching conditioned on those features. The approach is illustrated on three tasks (reaching with sticks, scooping candies, stepping on boxes/crates) and claims that the causal grounding yields more reliable tool selection and stronger skill transfer than baselines.
Significance. If the empirical claims are substantiated, the work offers a physics-grounded pipeline that could enable more generalizable creative tool use in robotics without requiring large amounts of real-world trial data. The combination of VLM feature suggestion with targeted counterfactual simulation is a concrete engineering contribution that directly addresses the problem of identifying causally relevant tool properties.
major comments (2)
- [Abstract / Results] Abstract and Results section: The central claim that 'baseline comparisons show that identifying causal features and grounding them in physical tool properties leads to more reliable tool selection and stronger skill keypoint transfer' is stated without any quantitative metrics, success rates, number of trials, objects tested, or statistical comparisons. This absence makes it impossible to assess whether the reported improvement is meaningful or reproducible.
- [Method / Evaluation] Method and Evaluation sections: The framework depends on a dynamics model to discover causal features that transfer to physical execution, yet the manuscript provides no real-robot validation, sim-to-real gap analysis, or sensitivity study on model fidelity (e.g., friction, deformation, or sensor noise). If these unmodeled effects alter the causal structure, the claimed reliability gains will not hold on hardware.
minor comments (2)
- [Method] The description of how VLM-suggested features are mapped to specific perturbation parameters in the dynamics model is high-level; a concrete example with one task would improve clarity.
- [Figures] Figure captions and axis labels in the experimental figures should explicitly state the number of trials and the exact baseline methods being compared.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the potential of our causal reasoning approach for robot tool use. We address each major comment point by point below, indicating planned revisions to the manuscript.
read point-by-point responses
-
Referee: [Abstract / Results] Abstract and Results section: The central claim that 'baseline comparisons show that identifying causal features and grounding them in physical tool properties leads to more reliable tool selection and stronger skill keypoint transfer' is stated without any quantitative metrics, success rates, number of trials, objects tested, or statistical comparisons. This absence makes it impossible to assess whether the reported improvement is meaningful or reproducible.
Authors: We agree that the abstract and results presentation would be strengthened by explicit quantitative support. The manuscript reports baseline comparisons across the three tasks (reaching, scooping, stepping), but these are summarized qualitatively without tabulated metrics. In the revised manuscript we will expand the abstract to include key numerical results (e.g., tool-selection success rates and skill-transfer success rates with number of trials and objects), add a results table with per-task metrics and statistical comparisons to baselines, and ensure all claims are backed by these numbers to enable reproducibility assessment. revision: yes
-
Referee: [Method / Evaluation] Method and Evaluation sections: The framework depends on a dynamics model to discover causal features that transfer to physical execution, yet the manuscript provides no real-robot validation, sim-to-real gap analysis, or sensitivity study on model fidelity (e.g., friction, deformation, or sensor noise). If these unmodeled effects alter the causal structure, the claimed reliability gains will not hold on hardware.
Authors: We acknowledge that the current work is conducted entirely in simulation and therefore does not contain real-robot validation or a dedicated sim-to-real study. The framework is designed to leverage precise counterfactual perturbations available only in a dynamics model. In the revision we will add a limitations subsection that discusses the sim-to-real gap, potential effects of unmodeled factors such as friction and deformation on causal feature identification, and a sensitivity analysis on key simulation parameters. We will also clarify that reliability gains are demonstrated within simulation and outline hardware validation as future work. revision: partial
Circularity Check
No circularity: engineering pipeline with no self-referential derivations or fitted predictions
full rationale
The paper describes a methodological framework for causal tool-use reasoning that relies on external components (dynamics model for simulation, VLM for feature suggestion, keypoint matching for transfer) without any equations, parameter fitting, or self-citations that would make performance claims reduce to quantities defined by the authors' own inputs. Baseline comparisons are presented as empirical evaluations rather than closed-form predictions, and the central claims rest on the fidelity of the (external) dynamics model rather than internal definitional loops. This is a standard self-contained engineering pipeline.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Learning how a tool affords by simulating 3d models from the web
Paulo Abelha and Frank Guerin. Learning how a tool affords by simulating 3d models from the web. In2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4923–4929, 2017. doi: 10. 1109/IROS.2017.8206372
-
[2]
Alejandro Agostini, Mohamad Javad Aein, Sandor Szed- mak, Eren Erdal Aksoy, Justus Piater, and Florentin W¨urg¨utter. Using structural bootstrapping for object substitution in robotic executions of human-like manipu- lation tasks. In2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 6479– 6486, 2015. doi: 10.1109/IROS.2...
-
[3]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Michael Ahn, Anthony Brohan, Noah Brown, Yevgen Chebotar, Omar Cortes, Byron David, Chelsea Finn, Chuyuan Fu, Keerthana Gopalakrishnan, Karol Haus- man, Alex Herzog, Daniel Ho, Jasmine Hsu, Julian Ibarz, Brian Ichter, Alex Irpan, Eric Jang, Rosario Jauregui Ruano, Kyle Jeffrey, Sally Jesmonth, Nikhil J Joshi, Ryan Julian, Dmitry Kalashnikov, Yuheng Kuang,...
work page internal anchor Pith review arXiv 2022
-
[4]
Rai - robotics and ai institute
Boston Dynamics. Rai - robotics and ai institute. https: //rai-inst.com, 2024
2024
-
[5]
Cambridge University Press, 2013
Josep Call.Three ingredients for becoming a creative tool user, page 3–20. Cambridge University Press, 2013
2013
-
[6]
Plato: Planning with llms and affordances for tool manipulation,
Arvind Car, Sai Sravan Yarlagadda, Alison Bartsch, Abraham George, and Amir Barati Farimani. Plato: Planning with llms and affordances for tool manipulation,
- [7]
-
[8]
Tool-as-interface: Learning robot policies from observing human tool use, 2025
Haonan Chen, Cheng Zhu, Shuijing Liu, Yunzhu Li, and Katherine Driggs-Campbell. Tool-as-interface: Learning robot policies from observing human tool use, 2025. URL https://arxiv.org/abs/2504.04612
-
[9]
Ar Code. Ar code. https://ar-code.com/page/ object-capture, 2025. Accessed: 2025-09-21
2025
-
[10]
Palm- e: An embodied multimodal language model
Danny Driess, Fei Xia, Mehdi SM Sajjadi, Corey Lynch, Aakanksha Chowdhery, Brian Ichter, Ayzaan Wahid, Jonathan Tompson, Quan Vuong, Tianhe Yu, et al. Palm- e: An embodied multimodal language model. InInter- national Conference on Machine Learning, pages 8469–
-
[11]
Learning task-oriented grasping for tool manipulation from simu- lated self-supervision
Kuan Fang, Yuke Zhu, Animesh Garg, Andrey Kurenkov, Viraj Mehta, Li Fei-Fei, and Silvio Savarese. Learning task-oriented grasping for tool manipulation from simu- lated self-supervision. InProceedings of Robotics: Sci- ence and Systems, Pittsburgh, Pennsylvania, June 2018. doi: 10.15607/RSS.2018.XIV .012
-
[12]
Human-guided trajectory adaptation for tool transfer
Tesca Fitzgerald, Elaine Short, Ashok Goel, and Andrea Thomaz. Human-guided trajectory adaptation for tool transfer. InProceedings of the 18th International Con- ference on Autonomous Agents and MultiAgent Systems, AAMAS ’19, page 1350–1358, Richland, SC, 2019. International Foundation for Autonomous Agents and Multiagent Systems. ISBN 9781450363099
2019
-
[13]
Modeling and learning constraints for creative tool use.Frontiers in Robotics and AI, 8, 2021
Tesca Fitzgerald, Ashok Goel, and Andrea Thomaz. Modeling and learning constraints for creative tool use.Frontiers in Robotics and AI, 8, 2021. ISSN 2296-9144. doi: 10.3389/frobt.2021.674292. URL https://www.frontiersin.org/journals/robotics-and-ai/ articles/10.3389/frobt.2021.674292
-
[14]
Adapting everyday manipulation skills to varied scenarios
Pawel Gajewski, Paulo Ferreira, Georg Bartels, Chaozheng Wang, Frank Guerin, Bipin Indurkhya, Michael Beetz, and Bartłomiej ´Sniezy´nski. Adapting everyday manipulation skills to varied scenarios. In2019 International Conference on Robotics and Automation (ICRA), pages 1345–1351, 2019. doi: 10.1109/ICRA.2019.8793590
-
[15]
Aditya Ganeshan, Ryan Y . Huang, Xianghao Xu, R. Kenny Jones, and Daniel Ritchie. Parsel: Parame- terized shape editing with language, 2024. URL https: //arxiv.org/abs/2405.20319
-
[16]
VLMgineer: Vision language models as robotic tool- smiths
George Jiayuan Gao, Tianyu Li, Junyao Shi, Yihan Li, Zizhe Zhang, Nadia Figueroa, and Dinesh Jayaraman. VLMgineer: Vision language models as robotic tool- smiths. In1st Workshop on Robot Hardware-Aware Intelligence, 2025. URL https://openreview.net/forum? id=i3JNInaLb9
2025
-
[17]
Wei Gao and Russ Tedrake. kpam 2.0: Feedback control for category-level robotic manipulation.IEEE Robotics and Automation Letters, 6(2):2962–2969, 2021. doi: 10. 1109/LRA.2021.3062315
-
[18]
Caelan Reed Garrett, Rohan Chitnis, Rachel Holladay, Beomjoon Kim, Tom Silver, Leslie Pack Kaelbling, and Tom ´as Lozano-P ´erez. Integrated task and motion planning.Annual Review of Control, Robotics, and Autonomous Systems, 4(V olume 4, 2021):265–293, 2021. ISSN 2573-5144. doi: https://doi.org/10.1146/annurev-control-091420-084139. URL https://www.annua...
-
[19]
Houghton Mifflin, 1979
James J Gibson.The Ecological Approach to Visual Perception: Classic Edition. Houghton Mifflin, 1979
1979
-
[20]
Learning intermediate object affordances: Towards the develop- ment of a tool concept
Afonso Gonc ¸alves, Jo˜ao Abrantes, Giovanni Saponaro, Lorenzo Jamone, and Alexandre Bernardino. Learning intermediate object affordances: Towards the develop- ment of a tool concept. In4th International Confer- ence on Development and Learning and on Epigenetic Robotics, pages 482–488, 2014. doi: 10.1109/DEVLRN. 2014.6983027
-
[21]
Frank Guerin, Norbert Kruger, and Dirk Kraft. A survey of the ontogeny of tool use: From sensorimotor experience to planning.IEEE Transactions on Au- tonomous Mental Development, 5(1):18–45, 2013. doi: 10.1109/TAMD.2012.2209879
-
[22]
Siyuan Huang, Iaroslav Ponomarenko, Zhengkai Jiang, Xiaoqi Li, Xiaobin Hu, Peng Gao, Hongsheng Li, and Hao Dong. Manipvqa: Injecting robotic affordance and physically grounded information into multi-modal large language models.CoRR, abs/2403.11289, 2024. URL https://doi.org/10.48550/arXiv.2403.11289
-
[23]
Sarah A. Jelbert, Alex H. Taylor, Lucy G. Cheke, Nicola S. Clayton, and Russell D. Gray. Using the ae- sop’s fable paradigm to investigate causal understanding of water displacement by new caledonian crows.PLOS ONE, 9, 03 2014. doi: 10.1371/journal.pone.0092895. URL https://doi.org/10.1371/journal.pone.0092895
-
[24]
The mentality of apes.Nature, 116:351–352, 2018
Wolfgang K ¨ohler. The mentality of apes.Nature, 116:351–352, 2018. URL https://api.semanticscholar.org/ CorpusID:4208655
2018
-
[25]
O. Kroemer, E. Ugur, E. Oztop, and J. Peters. A kernel-based approach to direct action perception. In 2012 IEEE International Conference on Robotics and Automation, pages 2605–2610, 2012. doi: 10.1109/ ICRA.2012.6224957
-
[26]
A review of robot learning for manipulation: Challenges, representations, and algorithms.Journal of Machine Learning Research, 22(30):1–82, 2021
Oliver Kroemer, Scott Niekum, and George Konidaris. A review of robot learning for manipulation: Challenges, representations, and algorithms.Journal of Machine Learning Research, 22(30):1–82, 2021. URL http://jmlr. org/papers/v22/19-804.html
2021
-
[27]
Non- prehensile tool-object manipulation by integrating llm- based planning and manoeuvrability-driven controls,
Hoi-Yin Lee, Peng Zhou, Anqing Duan, Wanyu Ma, Chenguang Yang, and David Navarro-Alarcon. Non- prehensile tool-object manipulation by integrating llm- based planning and manoeuvrability-driven controls,
- [28]
-
[29]
Lee, Jialiang Alan Zhao, Amrita S
Tabitha E. Lee, Jialiang Alan Zhao, Amrita S. Sawh- ney, Siddharth Girdhar, and Oliver Kroemer. Causal reasoning in simulation for structure and transfer learning of robot manipulation policies. In2021 IEEE Interna- tional Conference on Robotics and Automation (ICRA), pages 4776–4782, 2021. doi: 10.1109/ICRA48506.2021. 9561439
-
[30]
Robotsmith: Generative robotic tool design for acquisition of complex manipulation skills, 2025
Chunru Lin, Haotian Yuan, Yian Wang, Xiaowen Qiu, Tsun-Hsuan Wang, Minghao Guo, Bohan Wang, Yashraj Narang, Dieter Fox, and Chuang Gan. Robotsmith: Generative robotic tool design for acquisition of complex manipulation skills, 2025. URL https://arxiv.org/abs/ 2506.14763
-
[31]
Microsoft coco: Common objects in context
Tsung-Yi Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Deva Ramanan, Piotr Doll ´ar, and C Lawrence Zitnick. Microsoft coco: Common objects in context. InComputer vision–ECCV 2014: 13th European conference, zurich, Switzerland, September 6-12, 2014, proceedings, part v 13, pages 740–755. Springer, 2014
2014
-
[32]
One-shot ma- nipulation strategy learning by making contact analogies,
Yuyao Liu, Jiayuan Mao, Joshua Tenenbaum, Tom ´as Lozano-P´erez, and Leslie Pack Kaelbling. One-shot ma- nipulation strategy learning by making contact analogies,
- [33]
-
[34]
Learning to design and use tools for robotic manipulation,
Ziang Liu, Stephen Tian, Michelle Guo, C. Karen Liu, and Jiajun Wu. Learning to design and use tools for robotic manipulation, 2023. URL https://arxiv.org/abs/ 2311.00754
-
[35]
Kpam: Keypoint affordances for category-level robotic manipulation
Lucas Manuelli, Wei Gao, Peter Florence, and Russ Tedrake. Kpam: Keypoint affordances for category-level robotic manipulation. In Tamim Asfour, Eiichi Yoshida, Jaeheung Park, Henrik Christensen, and Oussama Khatib, editors,Robotics Research, pages 132–157, Cham, 2022. Springer International Publishing. ISBN 978-3-030- 95459-8
2022
-
[36]
Tenen- baum, and Leslie Pack Kaelbling
Jiayuan Mao, Tom ´as Lozano-P ´erez, Joshua B. Tenen- baum, and Leslie Pack Kaelbling. Learning reusable manipulation strategies. In Jie Tan, Marc Toussaint, and Kourosh Darvish, editors,Proceedings of The 7th Conference on Robot Learning, volume 229 ofProceed- ings of Machine Learning Research, pages 1467–1483. PMLR, 06–09 Nov 2023. URL https://proceedin...
2023
-
[37]
Tanis Mar, Vadim Tikhanoff, Giorgio Metta, and Lorenzo Natale. Self-supervised learning of tool affordances from 3d tool representation through parallel som mapping. In2017 IEEE International Conference on Robotics and Automation (ICRA), pages 894–901, 2017. doi: 10.1109/ICRA.2017.7989110
-
[38]
Mayank Mittal, Calvin Yu, Qinxi Yu, Jingzhou Liu, Nikita Rudin, David Hoeller, Jia Lin Yuan, Ritvik Singh, Yunrong Guo, Hammad Mazhar, Ajay Mandlekar, Buck Babich, Gavriel State, Marco Hutter, and Animesh Garg. Orbit: A unified simulation framework for interactive robot learning environments.IEEE Robotics and Au- tomation Letters, 8(6):3740–3747, 2023. do...
-
[39]
Teo, Cornelia Ferm ¨uller, and Yiannis Aloimonos
Austin Myers, Ching L. Teo, Cornelia Ferm ¨uller, and Yiannis Aloimonos. Affordance detection of tool parts from geometric features. In2015 IEEE International Conference on Robotics and Automation (ICRA), pages 1374–1381, 2015. doi: 10.1109/ICRA.2015.7139369
-
[40]
Shun Nishide, Jun Tani, Toru Takahashi, Hiroshi G. Okuno, and Tetsuya Ogata. Tool–body assimilation of humanoid robot using a neurodynamical system.IEEE Transactions on Autonomous Mental Development, 4(2): 139–149, 2012. doi: 10.1109/TAMD.2011.2177660
-
[41]
NVIDIA Isaac Sim
NVIDIA. NVIDIA Isaac Sim. https://developer.nvidia. com/isaac-sim, 2021
2021
-
[42]
Chatgpt (5.2 model)
OpenAI. Chatgpt (5.2 model). https://chat.openai.com,
-
[43]
Accessed: 2026-01-15
2026
-
[44]
Maxime Oquab, Timoth ´ee Darcet, Th ´eo Moutakanni, Huy V . V o, Marc Szafraniec, Vasil Khalidov, Pierre Fer- nandez, Daniel HAZIZA, Francisco Massa, Alaaeldin El- Nouby, Mido Assran, Nicolas Ballas, Wojciech Galuba, Russell Howes, Po-Yao Huang, Shang-Wen Li, Ishan Misra, Michael Rabbat, Vasu Sharma, Gabriel Synnaeve, Hu Xu, Herve Jegou, Julien Mairal, Pa...
2024
-
[45]
Cambridge University Press, 2 edition, 2009
Judea Pearl.Causality. Cambridge University Press, 2 edition, 2009
2009
-
[46]
Meiying Qin, Jake Brawer, and Brian Scassellati. Rapidly learning generalizable and robot-agnostic tool-use skills for a wide range of tasks.Frontiers in Robotics and AI, 8, 2021. ISSN 2296-9144. doi: 10.3389/frobt. 2021.726463. URL https://www.frontiersin.org/journals/ robotics-and-ai/articles/10.3389/frobt.2021.726463
-
[47]
Robot tool use: A survey.Frontiers in Robotics and AI, 9, 2023
Meiying Qin, Jake Brawer, and Brian Scassellati. Robot tool use: A survey.Frontiers in Robotics and AI, 9, 2023. ISSN 2296-9144. doi: 10.3389/frobt.2022. 1009488. URL https://www.frontiersin.org/journals/ robotics-and-ai/articles/10.3389/frobt.2022.1009488
-
[48]
Keto: Learning keypoint representations for tool manipulation
Zengyi Qin, Kuan Fang, Yuke Zhu, Li Fei-Fei, and Silvio Savarese. Keto: Learning keypoint representations for tool manipulation. In2020 IEEE International Confer- ence on Robotics and Automation (ICRA), pages 7278– 7285, 2020. doi: 10.1109/ICRA40945.2020.9196971
-
[49]
Ren, Bharat Govil, Tsung-Yen Yang, Karthik R Narasimhan, and Anirudha Majumdar
Allen Z. Ren, Bharat Govil, Tsung-Yen Yang, Karthik R Narasimhan, and Anirudha Majumdar. Leveraging lan- guage for accelerated learning of tool manipulation. In Karen Liu, Dana Kulic, and Jeff Ichnowski, editors, Proceedings of The 6th Conference on Robot Learning, volume 205 ofProceedings of Machine Learning Re- search, pages 1531–1541. PMLR, 14–18 Dec 2...
2023
-
[50]
To afford or not to afford: A new formalization of affordances toward affordance- based robot control.Adaptive Behavior, 15(4):447–472, 2007
Erol S ¸ahin, Maya Cakmak, Mehmet R Do ˘gar, Emre U˘gur, and G ¨okt¨urk ¨Uc ¸oluk. To afford or not to afford: A new formalization of affordances toward affordance- based robot control.Adaptive Behavior, 15(4):447–472, 2007
2007
-
[51]
Markus Schoeler and Florentin W ¨org¨otter. Bootstrapping the semantics of tools: Affordance analysis of real world objects on a per-part basis.IEEE Transactions on Cognitive and Developmental Systems, 8(2):84–98, 2016. doi: 10.1109/TAMD.2015.2488284
-
[52]
Towards causal representation learning, 2021
Bernhard Sch ¨olkopf, Francesco Locatello, Stefan Bauer, Nan Rosemary Ke, Nal Kalchbrenner, Anirudh Goyal, and Yoshua Bengio. Towards causal representation learning, 2021. URL https://arxiv.org/abs/2102.11107
-
[53]
Oriane Sim ´eoni, Huy V . V o, Maximilian Seitzer, Federico Baldassarre, Maxime Oquab, Cijo Jose, Vasil Khali- dov, Marc Szafraniec, Seungeun Yi, Micha ¨el Ramamon- jisoa, Francisco Massa, Daniel Haziza, Luca Wehrstedt, Jianyuan Wang, Timoth ´ee Darcet, Th ´eo Moutakanni, Leonel Sentana, Claire Roberts, Andrea Vedaldi, Jamie Tolan, John Brandt, Camille Co...
work page internal anchor Pith review arXiv 2025
-
[54]
Detecting the functional similarities between tools using a hierarchical representation of outcomes
Jivko Sinapov and Alexadner Stoytchev. Detecting the functional similarities between tools using a hierarchical representation of outcomes. In2008 7th IEEE Interna- tional Conference on Development and Learning, pages 91–96, 2008. doi: 10.1109/DEVLRN.2008.4640811
-
[55]
Learning and generalization of behavior-grounded tool affordances
Jivko Sinapov and Alexander Stoytchev. Learning and generalization of behavior-grounded tool affordances. In 2007 IEEE 6th International Conference on Develop- ment and Learning, pages 19–24, 2007. doi: 10.1109/ DEVLRN.2007.4354064
-
[56]
A. Stoytchev. Behavior-grounded representation of tool affordances. InProceedings of the 2005 IEEE Interna- tional Conference on Robotics and Automation, pages 3060–3065, 2005. doi: 10.1109/ROBOT.2005.1570580
-
[57]
Kuniyuki Takahashi, Kitae Kim, Tetsuya Ogata, and Shigeki Sugano. Tool-body assimilation model consid- ering grasping motion through deep learning.Robotics and Autonomous Systems, 91:115–127, 2017. ISSN 0921-8890. doi: https://doi.org/10.1016/j.robot.2017.01
-
[58]
URL https://www.sciencedirect.com/science/article/ pii/S0921889016303852
-
[59]
In: 2023 IEEE/CVF International Conference on Computer Vision (ICCV)
Jiajin Tang, Ge Zheng, Jingyi Yu, and Sibei Yang. CoT- Det: Affordance Knowledge Prompting for Task Driven Object Detection . In2023 IEEE/CVF International Con- ference on Computer Vision (ICCV), pages 3045–3055. IEEE Computer Society, 2023. doi: 10.1109/ICCV51070. 2023.00285. URL https://doi.ieeecomputersociety.org/ 10.1109/ICCV51070.2023.00285
-
[60]
SAM 3D: 3Dfy Anything in Images
SAM 3D Team, Xingyu Chen, Fu-Jen Chu, Pierre Gleize, Kevin J Liang, Alexander Sax, Hao Tang, Weiyao Wang, Michelle Guo, Thibaut Hardin, Xiang Li, Aohan Lin, Jiawei Liu, Ziqi Ma, Anushka Sagar, Bowen Song, Xiaodong Wang, Jianing Yang, Bowen Zhang, Piotr Doll´ar, Georgia Gkioxari, Matt Feiszli, and Jitendra Malik. Sam 3d: 3dfy anything in images, 2025. URL ...
work page internal anchor Pith review arXiv 2025
-
[61]
K. P. Tee, S. Cheong, J. Li, et al. A framework for tool cognition in robots without prior tool learning or observation.Nature Machine Intelligence, 4:533–543,
-
[62]
doi: 10.1038/s42256-022-00500-9
-
[63]
Tekden, Aykut Erdem, Erkut Erdem, Tamim Asfour, and Emre Ugur
Ahmet E. Tekden, Aykut Erdem, Erkut Erdem, Tamim Asfour, and Emre Ugur. Object and relation centric representations for push effect prediction.Robotics and Autonomous Systems, 174:104632, 2024. ISSN 0921-8890. doi: https://doi.org/10.1016/j.robot.2024. 104632. URL https://www.sciencedirect.com/science/ article/pii/S0921889024000150
-
[64]
V . Tikhanoff, U. Pattacini, L. Natale, and G. Metta. Exploring affordances and tool use on the icub. In 2013 13th IEEE-RAS International Conference on Hu- manoid Robots (Humanoids), pages 130–137, 2013. doi: 10.1109/HUMANOIDS.2013.7029967
-
[65]
Mu- joco: A physics engine for model-based control
Emanuel Todorov, Tom Erez, and Yuval Tassa. Mu- joco: A physics engine for model-based control. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 5026–5033, 2012. doi: 10.1109/IROS.2012.6386109
-
[66]
Reconciling reality through simulation: A real- to-sim-to-real approach for robust manipulation,
Marcel Torne, Anthony Simeonov, Zechu Li, April Chan, Tao Chen, Abhishek Gupta, and Pulkit Agrawal. Rec- onciling reality through simulation: A real-to-sim-to- real approach for robust manipulation.arXiv preprint arXiv:2403.03949, 2024
-
[67]
GIFT: Generalizable Interaction-aware Functional Tool Affordances without Labels
Dylan Turpin, Liquan Wang, Stavros Tsogkas, Sven Dickinson, and Animesh Garg. GIFT: Generalizable Interaction-aware Functional Tool Affordances without Labels. InProceedings of Robotics: Science and Systems, Virtual, July 2021. doi: 10.15607/RSS.2021.XVII.060
-
[68]
Improvisation through physical understanding: Using novel objects as tools with visual foresight
Annie Xie, Frederik Ebert, Sergey Levine, and Chelsea Finn. Improvisation through physical understanding: Using novel objects as tools with visual foresight. InPro- ceedings of Robotics: Science and Systems, Freiburgim- Breisgau, Germany, June 2019. doi: 10.15607/RSS.2019. XV .001
-
[69]
Creative robot tool use with large language models, 2024
Mengdi Xu, Wenhao Yu, Peide Huang, Shiqi Liu, Xilun Zhang, Yaru Niu, Tingnan Zhang, Fei Xia, Jie Tan, and Ding Zhao. Creative robot tool use with large language models, 2024. URL https://openreview.net/forum?id= IKOAJG6mru
2024
-
[70]
Lam, Yan-Pei Cao, and Xihui Liu
Yunhan Yang, Yukun Huang, Yuan-Chen Guo, Liangjun Lu, Xiaoyang Wu, Edmund Y . Lam, Yan-Pei Cao, and Xihui Liu. Sampart3d: Segment any part in 3d objects,
- [71]
-
[72]
Qiaojun Yu, Siyuan Huang, Xibin Yuan, Zhengkai Jiang, Ce Hao, Xin Li, Haonan Chang, Junbo Wang, Liu Liu, Hongsheng Li, Peng Gao, and Cewu Lu. Uniaff: A unified representation of affordances for tool usage and articulation with vision-language models, 2024. URL https://arxiv.org/abs/2409.20551
-
[73]
Under- standing tools: Task-oriented object modeling, learning and recognition
Yixin Zhu, Yibiao Zhao, and Song-Chun Zhu. Under- standing tools: Task-oriented object modeling, learning and recognition. In2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 2855– 2864, 2015. doi: 10.1109/CVPR.2015.7298903. APPENDIXA SUPPLEMENTARYMATERIAL A. A Motivating Example Consider the toy grid environment in Figure 8 wi...
-
[74]
Mao et al
transfers keypoints on robot limbs to tools to attribute limb functionality. Mao et al. [33] used contact points on objects and task and motion planning [17] in balancing tasks in addition to push and pull tasks. Gao and Tedrake [16] coupled key points with a feedback controller for wiping and peg insertion. These works addressed tool use problems where t...
-
[75]
Here, we are trying to repurpose an everyday object to satisfy the task instead of designing and printing 3D shapes
via VLMs. Here, we are trying to repurpose an everyday object to satisfy the task instead of designing and printing 3D shapes. C. Computer specifications and VLM calls The computer that we used to run our pipeline has Ubuntu 20.04 as the operating system, Nvidia A6000 as the GPU, AMD Ryzen threadripper 7970x, as the CPU, and 128 GB for the working memory....
-
[76]
aspect_ratio
Feature Generation prompts: a) Developer Prompt.: """Your goal is to help robots classify tools in order to solve tasks. There will be two outputs from this process. A list of prompts for a shape editor to modify a prototypical object, and a list of generic features that will be used to identify tool suitability. You will be provided with the image of the...
-
[77]
candidate_generic_properties
feature10_name ‘‘‘json {{ "candidate_generic_properties": [ {{ "name": "featureA_name", }}, {{ "name": "featureB_name", }}, ] "final_generic_properties": [ {{ "name": "featureX_name", }}, {{ "name": "featureY_name", }}, ... ], "shape_prompts":[ {{ "part":part_name, "edit_request":requestX_text", }}, ... ] }} ‘‘‘ I picked feaureX_name because... I picked f...
-
[78]
feature_judgements
Classification Prompts: Pull: """You are a robot assistant helping to classify tools for a pulling/retrieval task. You will be shown images comparing an input tool (GREEN, in the middle) with two reference tools: - BLUE tool (LEFT): The SMALLEST working tool for this feature - RED tool (RIGHT): The LARGEST working tool for this feature The images show dif...
-
[79]
tool_ranking
Baseline Prompts: a) Baseline with RGB only.: ’pull’: """Your task is to help a Franka Emika Panda robot arm retrieve a hockey ball. Attached is an image of the task (which also contains a hockey stick as the source tool), as well as an image containing various suitable real-world tools. Here are the names of the tools that should be in the image: black i...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.