Recognition: 2 theorem links
· Lean TheoremGemDepth: Geometry-Embedded Features for 3D-Consistent Video Depth
Pith reviewed 2026-05-14 21:24 UTC · model grok-4.3
The pith
GemDepth achieves 3D-consistent video depth by predicting camera poses to embed geometric structure into a transformer.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
GemDepth shows that an explicit Geometry-Embedding Module, which predicts inter-frame camera poses to produce implicit geometric embeddings, supplies the network with intrinsic 3D perception; these cues let the Alternating Spatio-Temporal Transformer capture latent point-level correspondences that simultaneously sharpen fine spatial details and enforce rigorous temporal consistency under camera motion.
What carries the argument
Geometry-Embedding Module (GEM) that predicts inter-frame camera poses to generate implicit geometric embeddings injected into the network.
If this is right
- Spatial details remain sharp in fine regions instead of blurring.
- Temporal consistency holds rigorously even when the camera rotates or changes viewpoint drastically.
- Performance reaches state-of-the-art levels on multiple datasets, especially complex dynamic scenes.
- Training remains data-efficient while still delivering robust geometric consistency.
Where Pith is reading between the lines
- The same pose-prediction-plus-embedding pattern could be tested on related tasks such as video object tracking or novel-view synthesis to check whether explicit motion geometry transfers.
- If the geometric embeddings prove sufficient, future video depth systems might reduce reliance on heavy post-processing smoothing.
- Evaluating the method on synthetic sequences with perfectly known ground-truth poses would isolate how much the embeddings contribute versus other network components.
Load-bearing premise
Accurate prediction of inter-frame camera poses is feasible and directly supplies the geometric embeddings required for strict 3D consistency.
What would settle it
Depth maps from the model that still exhibit clear temporal inconsistencies on sequences with known large rotations or viewpoint changes would falsify the central claim.
Figures









read the original abstract
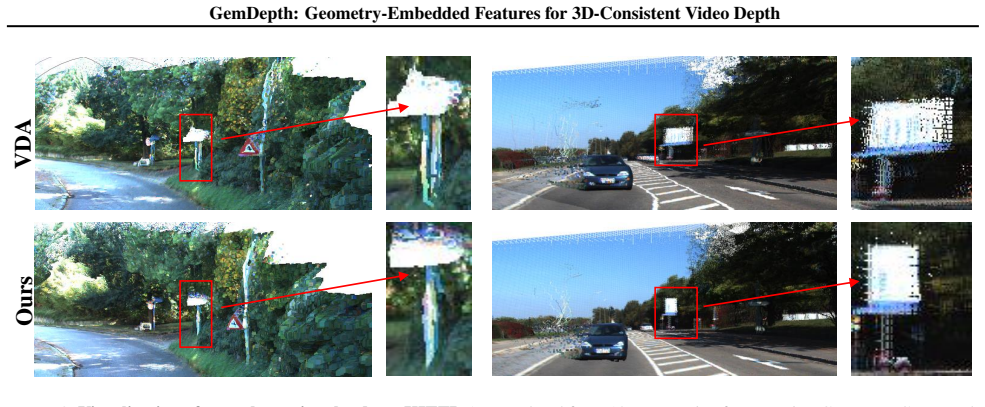
Video depth estimation extends monocular prediction into the temporal domain to ensure coherence. However, existing methods often suffer from spatial blurring in fine-detail regions and temporal inconsistencies. We argue that current approaches, which primarily rely on temporal smoothing via Transformers, struggle to maintain strict 3D geometric consistency-particularly under rotations or drastic view changes. To address this, we propose GemDepth, a framework built on the insight that an explicit awareness of camera motion and global 3D structure is a prerequisite for 3D consistency. Distinctively, GemDepth introduces a Geometry-Embedding Module (GEM) that predicts inter-frame camera poses to generate implicit geometric embeddings. This injection of motion priors equips the network with intrinsic 3D perception and alignment capabilities. Guided by these geometric cues, our Alternating Spatio-Temporal Transformer (ASTT) captures latent point-level correspondences to simultaneously enhance spatial precision for sharp details and enforce rigorous temporal consistency. Furthermore, GemDepth employs a data-efficient training strategy, effectively bridging the gap between high efficiency and robust geometric consistency. As shown in Fig.2, comprehensive evaluations demonstrate that GemDepth achieves state-of-the-art performance across multiple datasets, particularly in complex dynamic scenarios. The code is publicly available at: https://github.com/Yuecheng919/GemDepth.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes GemDepth for video depth estimation, introducing a Geometry-Embedding Module (GEM) that predicts inter-frame camera poses to generate implicit geometric embeddings, which guide an Alternating Spatio-Temporal Transformer (ASTT) to capture point-level correspondences for enhanced spatial detail and strict 3D temporal consistency. It claims SOTA performance across datasets, especially in complex dynamic scenes, via a data-efficient training strategy.
Significance. If the central claims hold, the explicit injection of camera-motion priors via GEM could meaningfully advance 3D-consistent video depth beyond pure temporal-smoothing Transformers, with potential benefits for dynamic-scene applications; the public code release supports reproducibility.
major comments (2)
- [Abstract / §3] Abstract and §3 (GEM description): the claim that predicted inter-frame poses yield reliable geometric embeddings for strict 3D consistency under rotations or drastic view changes rests on an untested rigid-scene assumption; dynamic scenes with independent object motion can cause standard pose estimators to fail, producing misaligned embeddings that undermine the ASTT correspondences. No ablation isolating GEM, no pose-supervision details, and no dynamic-object masking strategy are described.
- [Abstract / Evaluation] Abstract and evaluation section: SOTA is asserted via Fig. 2 with no quantitative metrics, error bars, per-dataset tables, or ablation studies provided in the text, so the strength of the performance claim (especially the dynamic-scenario advantage) cannot be verified.
minor comments (2)
- [§3] Notation for GEM and ASTT is introduced without a clear diagram or pseudocode; adding one would improve readability.
- [§4] The data-efficient training strategy is mentioned but not detailed with respect to loss terms or dataset splits.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. We have carefully reviewed each major comment and provide point-by-point responses below. We agree that several clarifications and additions are needed to strengthen the manuscript and will incorporate revisions accordingly.
read point-by-point responses
-
Referee: [Abstract / §3] Abstract and §3 (GEM description): the claim that predicted inter-frame poses yield reliable geometric embeddings for strict 3D consistency under rotations or drastic view changes rests on an untested rigid-scene assumption; dynamic scenes with independent object motion can cause standard pose estimators to fail, producing misaligned embeddings that undermine the ASTT correspondences. No ablation isolating GEM, no pose-supervision details, and no dynamic-object masking strategy are described.
Authors: We acknowledge the validity of this concern. The current description in §3 does not explicitly address how GEM behaves under significant independent object motion, nor does it include an ablation isolating GEM or details on pose supervision. In the revised manuscript we will: (1) add an ablation study that isolates the GEM module and quantifies its contribution to 3D consistency; (2) provide the exact pose-supervision losses (photometric consistency and smoothness terms) and training protocol; and (3) include a brief discussion of robustness to dynamic objects, noting that the alternating spatio-temporal transformer can partially compensate for misaligned embeddings. We will also qualify the claim regarding “strict 3D consistency” to reflect the practical limitations of pose estimation in highly dynamic scenes. revision: yes
-
Referee: [Abstract / Evaluation] Abstract and evaluation section: SOTA is asserted via Fig. 2 with no quantitative metrics, error bars, per-dataset tables, or ablation studies provided in the text, so the strength of the performance claim (especially the dynamic-scenario advantage) cannot be verified.
Authors: We apologize for the insufficient presentation of quantitative results. The full evaluation section contains per-dataset tables reporting AbsRel, SqRel, RMSE, and δ1 metrics, together with ablation studies; however, these were not sufficiently highlighted in the text or abstract. In the revision we will: (1) explicitly quote the key numerical results and per-dataset breakdowns in the main text; (2) add error bars to the reported metrics where multiple runs were performed; and (3) expand the ablation subsection to directly support the dynamic-scene advantage claim. These changes will make the performance assertions verifiable without relying solely on Fig. 2. revision: yes
Circularity Check
No significant circularity; framework presented as independent architectural addition
full rationale
The paper describes GemDepth as introducing a Geometry-Embedding Module (GEM) that predicts inter-frame camera poses to generate embeddings, followed by an Alternating Spatio-Temporal Transformer (ASTT) for point-level correspondences. No equations, derivations, or self-citations are exhibited that reduce the claimed 3D consistency or SOTA performance to fitted parameters or prior results by construction. The approach is framed as an explicit architectural insight independent of the target outputs, with evaluations on external datasets. This is the most common honest finding for papers whose central contribution is a new module rather than a closed-form derivation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Explicit camera-motion awareness is a prerequisite for strict 3D geometric consistency under rotation or view change.
invented entities (2)
-
Geometry-Embedding Module (GEM)
no independent evidence
-
Alternating Spatio-Temporal Transformer (ASTT)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
GemDepth introduces a Geometry-Embedding Module (GEM) that predicts inter-frame camera poses to generate implicit geometric embeddings... Alternating Spatio-Temporal Transformer (ASTT) captures latent point-level correspondences
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
no mention of recognition cost, golden-ratio identities, 8-tick clocks or dimension forcing
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
1–a model zoo for robust monocular relative depth estimation
Birkl, R., Wofk, D., and M¨uller, M. Midas v3. 1–a model zoo for robust monocular relative depth estimation.arXiv preprint arXiv:2307.14460,
-
[2]
Stable Video Diffusion: Scaling Latent Video Diffusion Models to Large Datasets
Blattmann, A., Dockhorn, T., Kulal, S., Mendelevitch, D., Kilian, M., Lorenz, D., Levi, Y ., English, Z., V oleti, V ., Letts, A., et al. Stable video diffusion: Scaling latent video diffusion models to large datasets.arXiv preprint arXiv:2311.15127, 2023a. Blattmann, A., Rombach, R., Ling, H., Dockhorn, T., Kim, S. W., Fidler, S., and Kreis, K. Align you...
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
arXiv preprint arXiv:2001.10773,
work page internal anchor Pith review Pith/arXiv arXiv 2001
-
[4]
VideoCrafter1: Open Diffusion Models for High-Quality Video Generation
Chen, H., Xia, M., He, Y ., Zhang, Y ., Cun, X., Yang, S., Xing, J., Liu, Y ., Chen, Q., Wang, X., et al. Videocrafter1: Open diffusion models for high-quality video generation. arXiv preprint arXiv:2310.19512,
work page internal anchor Pith review arXiv
-
[5]
Romeo: Robust metric visual odometry
Cheng, J., Cai, Z., Zhang, Z., Yin, W., Muller, M., Paulitsch, M., and Yang, X. Romeo: Robust metric visual odometry. arXiv preprint arXiv:2412.11530, 2024a. Cheng, J., Xu, G., Guo, P., and Yang, X. Coatrsnet: Fully exploiting convolution and attention for stereo matching by region separation.International Journal of Computer Vision, 132(1):56–73, 2024b. ...
-
[6]
Deep ordinal regression network for monocular depth estimation
Fu, H., Gong, M., Wang, C., Batmanghelich, K., and Tao, D. Deep ordinal regression network for monocular depth estimation. InProceedings of the IEEE conference on computer vision and pattern recognition, pp. 2002–2011,
work page 2002
-
[7]
Depthcrafter: Generating consistent long depth sequences for open-world videos
Hu, W., Gao, X., Li, X., Zhao, S., Cun, X., Zhang, Y ., Quan, L., and Shan, Y . Depthcrafter: Generating consistent long depth sequences for open-world videos. InProceedings of the Computer Vision and Pattern Recognition Conference, pp. 2005–2015,
work page 2005
-
[8]
MapAnything: Universal Feed-Forward Metric 3D Reconstruction
Keetha, N., M¨uller, N., Sch¨onberger, J., Porzi, L., Zhang, Y ., Fischer, T., Knapitsch, A., Zauss, D., Weber, E., Antunes, N., et al. Mapanything: Universal feed-forward metric 3d reconstruction.arXiv preprint arXiv:2509.13414,
work page internal anchor Pith review Pith/arXiv arXiv
-
[9]
Depth Anything 3: Recovering the Visual Space from Any Views
Lin, H., Chen, S., Liew, J. H., Chen, D. Y ., Li, Z., Shi, G., Feng, J., and Kang, B. Depth anything 3: Recov- ering the visual space from any views.arXiv preprint arXiv:2511.10647,
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
DINOv2: Learning Robust Visual Features without Supervision
Oquab, M., Darcet, T., Moutakanni, T., V o, H., Szafraniec, M., Khalidov, V ., Fernandez, P., Haziza, D., Massa, F., El- Nouby, A., et al. Dinov2: Learning robust visual features without supervision.arXiv preprint arXiv:2304.07193,
work page internal anchor Pith review Pith/arXiv arXiv
-
[11]
Stabledpt: Temporal stable monocular video depth estimation.arXiv preprint arXiv:2601.02793,
Sobko, I., Riemenschneider, H., Gross, M., and Schroers, C. Stabledpt: Temporal stable monocular video depth estimation.arXiv preprint arXiv:2601.02793,
-
[12]
Wang, J., Chen, M., Karaev, N., Vedaldi, A., Rupprecht, C., and Novotny, D. Vggt: Visual geometry grounded transformer. InProceedings of the Computer Vision and Pattern Recognition Conference, pp. 5294–5306, 2025a. Wang, Q., Zheng, S., Yan, Q., Deng, F., Zhao, K., and Chu, X. Irs: A large naturalistic indoor robotics stereo dataset to train deep models fo...
-
[13]
Stereogen: High-quality stereo image generation from a single image.arXiv e- prints, pp
Wang, X., Yang, H., Xu, G., Cheng, J., Lin, M., Deng, Y ., Zang, J., Chen, Y ., and Yang, X. Stereogen: High-quality stereo image generation from a single image.arXiv e- prints, pp. arXiv–2501, 2025b. Wang, X., Yang, H., Xu, G., Cheng, J., Lin, M., Deng, Y ., Zang, J., Chen, Y ., and Yang, X. Zerostereo: Zero-shot stereo matching from single images. InPro...
-
[14]
Xu, G., Lin, H., Luo, H., Wang, X., Yao, J., Zhu, L., Pu, Y ., Chi, C., Sun, H., Wang, B., et al. Pixel-perfect depth with semantics-prompted diffusion transformers.arXiv preprint arXiv:2510.07316, 2025a. Xu, G., Liu, J., Wang, X., Cheng, J., Deng, Y ., Zang, J., Chen, Y ., and Yang, X. Banet: Bilateral aggregation network for mobile stereo matching. InPr...
-
[15]
Table 8.Summary of datasets used for training
This approach enables the network to generalize across varying aspect ratios and resolutions. Table 8.Summary of datasets used for training. Dataset Indoor Outdoor # Images Pose-annotated datasets Virtual KITTI 2 (Cabon et al., 2020)✓40K Tartanair (Wang et al., 2020)✓ ✓300K PointOdyssey (Zheng et al., 2023)✓ ✓70K MVS-Synth (Huang et al., 2018)✓80K Dynamic...
work page 2020
-
[16]
dataset as a benchmark. Specifically, we conduct a comparative analysis between two versions of our GemDepth and the current state-of-the-art method, VideoDepthAnything (VDA) (Chen et al., 2025), under five different sequence lengths: 500, 400, 300, 200, and 100 frames. As demonstrated in Tab. 10, both versions of GemDepth consistently outperform VDA acro...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.