Recognition: 2 theorem links
· Lean TheoremLEXI-SG: Monocular 3D Scene Graph Mapping with Room-Guided Feed-Forward Reconstruction
Pith reviewed 2026-05-14 18:08 UTC · model grok-4.3
The pith
Monocular RGB alone can build accurate dense open-vocabulary 3D scene graphs when rooms guide reconstruction order and global alignment.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
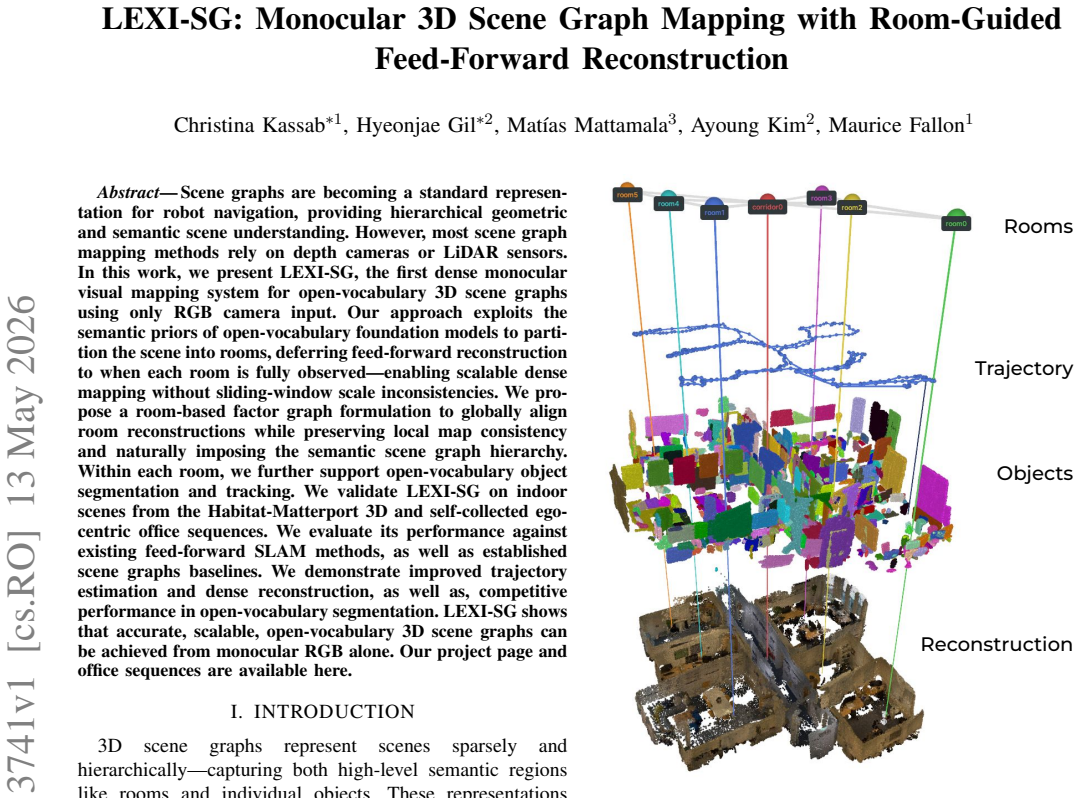
LEXI-SG shows that dense monocular 3D scene graphs become feasible when semantic priors partition the scene into rooms, each room is reconstructed feed-forward only after complete observation, and the resulting local maps are globally aligned by a room-based factor graph that naturally enforces the scene-graph hierarchy.
What carries the argument
Room-partitioned feed-forward reconstruction combined with a room-based factor graph that globally aligns local maps while enforcing semantic hierarchy.
If this is right
- Trajectory estimation improves on indoor sequences relative to existing feed-forward SLAM methods.
- Dense reconstruction quality rises because sliding-window scale inconsistencies are eliminated.
- Open-vocabulary object segmentation and tracking operate inside each reconstructed room.
- The semantic scene-graph hierarchy emerges directly from the room alignment process.
- Scalable mapping on longer sequences becomes possible with only RGB input.
Where Pith is reading between the lines
- Robots could perform semantic navigation in homes and offices using only a single inexpensive camera.
- The same room-deferral idea could be tested in outdoor environments if analogous spatial partitions can be defined.
- Newer or larger foundation models could be swapped in to raise segmentation accuracy without redesigning the mapping pipeline.
- Global consistency across rooms may enable reliable loop closure even when visual overlap between rooms is low.
Load-bearing premise
Open-vocabulary foundation models can reliably identify consistent room boundaries so that per-room deferred reconstruction avoids creating new drift or alignment errors.
What would settle it
A long indoor sequence in which room partitions are ambiguous or incorrect, producing visible scale drift or misalignment once the room maps are joined in the global factor graph.
Figures





read the original abstract
Scene graphs are becoming a standard representation for robot navigation, providing hierarchical geometric and semantic scene understanding. However, most scene graph mapping methods rely on depth cameras or LiDAR sensors. In this work, we present LEXI-SG, the first dense monocular visual mapping system for open-vocabulary 3D scene graphs using only RGB camera input. Our approach exploits the semantic priors of open-vocabulary foundation models to partition the scene into rooms, deferring feed-forward reconstruction to when each room is fully observed -- enabling scalable dense mapping without sliding-window scale inconsistencies. We propose a room-based factor graph formulation to globally align room reconstructions while preserving local map consistency and naturally imposing the semantic scene graph hierarchy. Within each room, we further support open-vocabulary object segmentation and tracking. We validate LEXI-SG on indoor scenes from the Habitat-Matterport 3D and self-collected egocentric office sequences. We evaluate its performance against existing feed-forward SLAM methods, as well as established scene graphs baselines. We demonstrate improved trajectory estimation and dense reconstruction, as well as, competitive performance in open-vocabulary segmentation. LEXI-SG shows that accurate, scalable, open-vocabulary 3D scene graphs can be achieved from monocular RGB alone. Our project page and office sequences are available here: https://ori-drs.github.io/lexisg-web/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. LEXI-SG presents the first dense monocular RGB-only system for open-vocabulary 3D scene graph mapping. It uses open-vocabulary foundation models to partition the scene into rooms, defers feed-forward reconstruction until each room is fully observed to avoid sliding-window scale drift, and employs a room-based factor-graph formulation for global alignment that preserves local consistency and encodes the semantic hierarchy. Within rooms it adds open-vocabulary object segmentation and tracking. The method is evaluated on Habitat-Matterport 3D and self-collected egocentric office sequences, reporting improved trajectory estimation and dense reconstruction relative to feed-forward SLAM and scene-graph baselines.
Significance. If the room-guided deferral and factor-graph alignment prove robust, the work would constitute a meaningful step toward scalable, sensor-light semantic mapping for robotics. The explicit use of foundation-model priors for hierarchical decomposition and the avoidance of depth sensors address practical constraints in many indoor deployments; reproducible code and project data further strengthen the contribution.
major comments (3)
- [§3.2] §3.2 (Room Partitioning): The central claim that deferring reconstruction until rooms are 'fully observed' eliminates scale inconsistencies rests on the unvalidated assumption that open-vocabulary foundation models produce reliable room boundaries. No quantitative segmentation accuracy, failure-mode analysis, or sensitivity study to ambiguous walls/doorways/partial views is reported, despite the skeptic note that such failures would propagate directly into the factor-graph alignment.
- [§4] §4 (Room-Based Factor Graph): The global alignment formulation assumes clean room boundaries and complete observations; the manuscript provides no experiments quantifying inter-room misalignment or residual drift when segmentation is imperfect. This directly affects the scalability and 'parameter-free' claims for monocular input.
- [Evaluation] Evaluation section: While improved trajectory and reconstruction metrics are asserted versus baselines, the paper supplies no ablation isolating the contribution of room-deferred reconstruction versus standard sliding-window or global optimization, nor statistical significance across multiple runs, making it impossible to confirm that gains arise from the proposed mechanism rather than implementation details.
minor comments (2)
- [Figures] Figure captions and axis labels in the qualitative results are occasionally underspecified (e.g., units for reconstruction error).
- [Related Work] Related-work discussion omits several recent monocular scene-graph and open-vocabulary mapping papers from 2023-2024; a brief comparison table would clarify novelty.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on our manuscript. We appreciate the opportunity to clarify and strengthen our contributions. Below, we provide point-by-point responses to the major comments.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Room Partitioning): The central claim that deferring reconstruction until rooms are 'fully observed' eliminates scale inconsistencies rests on the unvalidated assumption that open-vocabulary foundation models produce reliable room boundaries. No quantitative segmentation accuracy, failure-mode analysis, or sensitivity study to ambiguous walls/doorways/partial views is reported, despite the skeptic note that such failures would propagate directly into the factor-graph alignment.
Authors: We acknowledge that the reliability of room partitioning is crucial to our approach. While we rely on state-of-the-art open-vocabulary models such as those based on CLIP and SAM for semantic segmentation, we agree that additional validation would strengthen the paper. In the revised manuscript, we will include quantitative metrics for room segmentation accuracy on the evaluation datasets, along with a failure-mode analysis for cases involving ambiguous boundaries. This will demonstrate the robustness of the partitioning step and its impact on the overall system. revision: partial
-
Referee: [§4] §4 (Room-Based Factor Graph): The global alignment formulation assumes clean room boundaries and complete observations; the manuscript provides no experiments quantifying inter-room misalignment or residual drift when segmentation is imperfect. This directly affects the scalability and 'parameter-free' claims for monocular input.
Authors: The room-based factor graph is designed to handle potential imperfections by optimizing over the semantic hierarchy and using relative constraints between rooms. However, we agree that explicit quantification of misalignment under imperfect segmentation would be valuable. We will add experiments in the revision that simulate or analyze cases with noisy room boundaries, reporting inter-room drift metrics to support the scalability claims. revision: yes
-
Referee: [Evaluation] Evaluation section: While improved trajectory and reconstruction metrics are asserted versus baselines, the paper supplies no ablation isolating the contribution of room-deferred reconstruction versus standard sliding-window or global optimization, nor statistical significance across multiple runs, making it impossible to confirm that gains arise from the proposed mechanism rather than implementation details.
Authors: We appreciate this point regarding the need for ablations. The current evaluation compares against feed-forward SLAM and scene-graph baselines, showing improvements attributable to our room-guided approach. To isolate the contribution, we will include an ablation study in the revised version comparing room-deferred reconstruction against sliding-window variants. Additionally, we will report results with standard deviations across multiple runs to provide statistical context. revision: yes
Circularity Check
No significant circularity in LEXI-SG system description
full rationale
The paper presents an engineering system for monocular scene graph mapping that partitions scenes using external open-vocabulary foundation models, defers per-room feed-forward reconstruction, and applies a standard room-based factor-graph optimizer. No equations, parameter fits, or derivations are shown that reduce the claimed trajectory or reconstruction improvements to quantities defined or fitted inside the same pipeline. The approach relies on independent external models and established SLAM techniques rather than self-referential loops, self-citation chains, or ansatzes smuggled from prior author work. This is the common honest outcome for a systems paper whose central claims rest on empirical validation against external benchmarks rather than internal re-derivation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Open-vocabulary foundation models supply sufficiently accurate semantic priors to partition indoor scenes into rooms
- standard math Standard factor-graph optimization can globally align per-room reconstructions while preserving local consistency
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our approach exploits the semantic priors of open-vocabulary foundation models to partition the scene into rooms, deferring feed-forward reconstruction to when each room is fully observed—enabling scalable dense mapping without sliding-window scale inconsistencies. We propose a room-based factor graph formulation to globally align room reconstructions while preserving local map consistency
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
A Sim(3) room-level factor graph that globally aligns per-room reconstructions while preserving local consistency and correcting monocular scale ambiguity
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Hierarchical Open-V ocabulary 3D Scene Graphs for Language-Grounded Robot Navigation,
A. Werbyet al., “Hierarchical Open-V ocabulary 3D Scene Graphs for Language-Grounded Robot Navigation,”Robot.: Sci. Syst., 2024
2024
-
[2]
ConceptGraphs: Open-V ocabulary 3D Scene Graphs for Perception and Planning,
Q. Guet al., “ConceptGraphs: Open-V ocabulary 3D Scene Graphs for Perception and Planning,” inIEEE Int. Conf. Robot. Autom. (ICRA), 2024
2024
-
[3]
Kimera: from SLAM to Spatial Perception with 3D Dynamic Scene Graphs,
A. Rosinolet al., “Kimera: from SLAM to Spatial Perception with 3D Dynamic Scene Graphs,”Int. J. Robot. Res., 2021
2021
-
[4]
OpenMask3D: Open-V ocabulary 3D Instance Segmentation,
A. Takmazet al., “OpenMask3D: Open-V ocabulary 3D Instance Segmentation,” inAdv. Neural Inf. Process. Syst. (NeurIPS), 2023
2023
-
[5]
Clio: Real-time Task-Driven Open-Set 3D Scene Graphs,
D. Maggioet al., “Clio: Real-time Task-Driven Open-Set 3D Scene Graphs,”IEEE Robot. Autom. Lett., vol. 9, no. 10, pp. 8921–8928, 2024
2024
-
[6]
ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM,
C. Camposet al., “ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM,”IEEE Trans. Robot., vol. 37, no. 6, pp. 1874–1890, 2021
2021
-
[7]
VINS-Mono: A Robust and Versa- tile Monocular Visual-Inertial State Estimator,
T. Qin, P. Li, and S. Shen, “VINS-Mono: A Robust and Versa- tile Monocular Visual-Inertial State Estimator,”IEEE Trans. Robot., vol. 34, no. 4, pp. 1004–1020, 2018
2018
-
[8]
MonoSLAM: Real-Time Single Camera SLAM
A. J. Davison, I. D. Reid, N. Molton, and O. Stasse, “MonoSLAM: Real-Time Single Camera SLAM.”IEEE Trans. Pattern Anal. Mach. Intell., vol. 29, no. 6, pp. 1052–1067, 2007
2007
-
[9]
Fusion++: V olumetric Object-Level SLAM,
J. McCormacet al., “Fusion++: V olumetric Object-Level SLAM,” in Intl. Conf. 3D Vision (3DV), 2018, pp. 32–41
2018
-
[10]
SLAM++: Simultaneous Localisation and Mapping at the Level of Objects,
R. F. Salas-Morenoet al., “SLAM++: Simultaneous Localisation and Mapping at the Level of Objects,” inIEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), 2013
2013
-
[11]
VGGT: Visual Geometry Grounded Transformer,
J. Wanget al., “VGGT: Visual Geometry Grounded Transformer,” in IEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), 2025
2025
-
[12]
Grounding Image Matching in 3D with MASt3R,
V . Leroy, Y . Cabon, and J. Revaud, “Grounding Image Matching in 3D with MASt3R,” inEur. Conf. Comput. Vis. (ECCV), 2024
2024
-
[13]
MapAnything: Universal Feed-Forward Metric 3D Reconstruction,
N. Keethaet al., “MapAnything: Universal Feed-Forward Metric 3D Reconstruction,” inIntl. Conf. 3D Vision (3DV). IEEE, 2026
2026
-
[14]
MASt3R-SLAM: Real- Time Dense SLAM with 3D Reconstruction Priors,
R. Murai, E. Dexheimer, and A. J. Davison, “MASt3R-SLAM: Real- Time Dense SLAM with 3D Reconstruction Priors,” inIEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), 2025
2025
-
[15]
VGGT-SLAM: Dense RGB SLAM Optimized on the SL (4) Manifold,
D. Maggio, H. Lim, and L. Carlone, “VGGT-SLAM: Dense RGB SLAM Optimized on the SL (4) Manifold,”Adv. Neural Inf. Process. Syst. (NeurIPS), vol. 39, 2025
2025
-
[16]
ViSTA-SLAM: Visual SLAM with Symmetric Two-view Association,
G. Zhang, S. Qian, X. Wang, and D. Cremers, “ViSTA-SLAM: Visual SLAM with Symmetric Two-view Association,”CoRR, vol. abs/2509.01584, 2025
-
[17]
Learning Transferable Visual Models From Natural Language Supervision,
A. Radfordet al., “Learning Transferable Visual Models From Natural Language Supervision,”Int. Conf. Mach. Learn. (ICML), 2021
2021
-
[18]
SAM 2: Segment anything in images and videos,
N. Raviet al., “SAM 2: Segment anything in images and videos,” in Intl. Conf. on Learning Representations (ICLR), 2025
2025
-
[19]
O. Sim ´eoniet al., “Dinov3,”CoRR, vol. abs/2508.10104, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[20]
Ovir-3d: Open-vocabulary 3D Instance Retrieval Without Training on 3D Data,
S. Luet al., “Ovir-3d: Open-vocabulary 3D Instance Retrieval Without Training on 3D Data,” inConf. on Robot Learning (CoRL). PMLR, 2023, pp. 1610–1620
2023
-
[21]
OpenScene: 3D Scene Understanding with Open V ocabularies,
S. Penget al., “OpenScene: 3D Scene Understanding with Open V ocabularies,” inIEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), 2023
2023
-
[22]
ConceptFusion: Open-set Multimodal 3D Mapping,
K. Jatavallabhulaet al., “ConceptFusion: Open-set Multimodal 3D Mapping,” inRobot.: Sci. Syst., 2023
2023
-
[23]
LERF: Language Embedded Radiance Fields,
J. Kerret al., “LERF: Language Embedded Radiance Fields,” inIEEE Int. Conf. Comput. Vis. (ICCV), 2023, pp. 19 672–19 682
2023
-
[24]
RayFronts: Open-Set Semantic Ray Frontiers for Online Scene Understanding and Exploration,
O. Alamaet al., “RayFronts: Open-Set Semantic Ray Frontiers for Online Scene Understanding and Exploration,” inIEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025
2025
-
[25]
LSD-SLAM: Large-scale direct monocular SLAM,
J. Engel, T. Sch ¨ops, and D. Cremers, “LSD-SLAM: Large-scale direct monocular SLAM,” inEur. Conf. Comput. Vis. (ECCV), 2014
2014
-
[26]
K. Denget al., “VGGT-Long: Chunk it, Loop it, Align it - Pushing VGGT’s Limits on Kilometer-scale Long RGB Sequences,”CoRR, vol. abs/2507.16443, 2025
-
[27]
CubeSLAM: Monocular 3-D Object SLAM,
S. Yang and S. Scherer, “CubeSLAM: Monocular 3-D Object SLAM,” IEEE Trans. Robot., vol. 35, no. 4, pp. 925–938, 2019
2019
-
[28]
Recognize Anything: A Strong Image Tagging Model,
Y . Zhanget al., “Recognize Anything: A Strong Image Tagging Model,” inIEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), 2024, pp. 1724–1732
2024
-
[29]
Grounding DINO: Marrying DINO with grounded pre-training for open-set object detection,
S. Liuet al., “Grounding DINO: Marrying DINO with grounded pre-training for open-set object detection,” inEur. Conf. Com- put. Vis. (ECCV), 2024, pp. 38–55
2024
-
[30]
VGGT-SLAM 2.0: Real-time Dense Feed- forward Scene Reconstruction,
D. Maggio and L. Carlone, “VGGT-SLAM 2.0: Real-time Dense Feed- forward Scene Reconstruction,”CoRR, vol. abs/2601.19887, 2026
-
[31]
Hydra: A Real-time Spatial Perception System for 3D Scene Graph Construction and Optimiza- tion,
N. Hughes, Y . Chang, and L. Carlone, “Hydra: A Real-time Spatial Perception System for 3D Scene Graph Construction and Optimiza- tion,” inRobot.: Sci. Syst., 2022
2022
-
[32]
A Benchmark for the Evaluation of RGB-D SLAM Systems,
J. Sturmet al., “A Benchmark for the Evaluation of RGB-D SLAM Systems,” inIEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2012
2012
-
[33]
Habitat-Matterport 3D Dataset (HM3D): 1000 Large-scale 3D Environments for Embodied AI,
S. K. Ramakrishnanet al., “Habitat-Matterport 3D Dataset (HM3D): 1000 Large-scale 3D Environments for Embodied AI,” inAdv. Neural Inf. Process. Syst. (NeurIPS), 2021
2021
-
[34]
Benchmarking Egocentric Visual-Inertial SLAM at City Scale,
A. Krishnanet al., “Benchmarking Egocentric Visual-Inertial SLAM at City Scale,” inIEEE Int. Conf. Comput. Vis. (ICCV), 2025
2025
-
[35]
OpenLex3D: A New Evaluation Benchmark for Open-V ocabulary 3D Scene Representations,
C. Kassabet al., “OpenLex3D: A New Evaluation Benchmark for Open-V ocabulary 3D Scene Representations,”Adv. Neural Inf. Pro- cess. Syst. (NeurIPS), 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.