Learning-Based Adaptive Control for Surgical Robotic Exposure Task on Deformable Tissues
Pith reviewed 2026-05-20 10:52 UTC · model grok-4.3
The pith
A learning-based adaptive controller lets surgical robots retract deformable tissues to expose hidden regions of interest using only simulation-trained models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
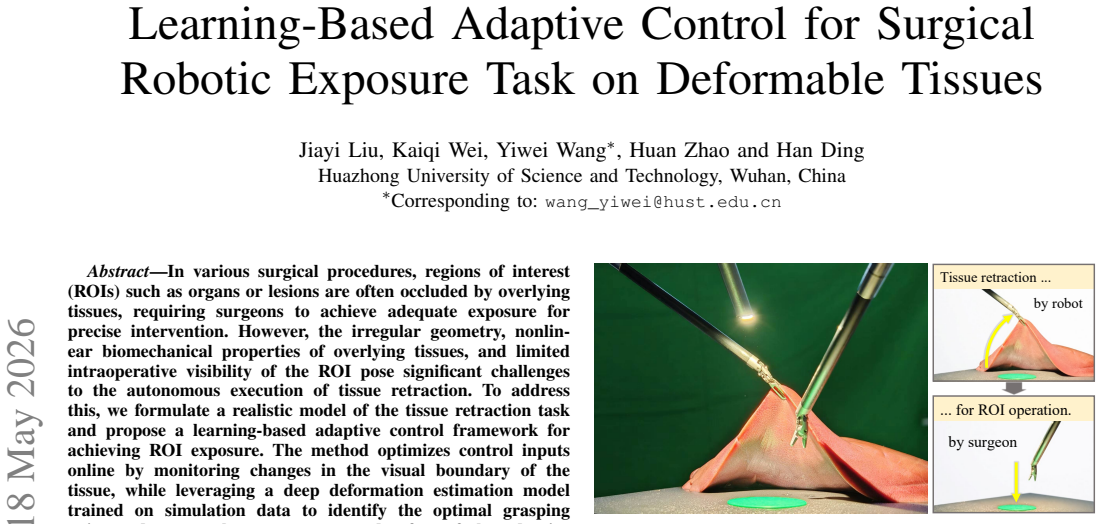
The authors formulate a model of the tissue retraction task and present a learning-based adaptive control framework that optimizes control inputs online by monitoring visual boundary changes while using a deep deformation estimation model trained on simulation data to identify the optimal grasping point and ensure convergence and safety, resulting in demonstrated zero-shot adaptation to similar tasks and completion of the full autonomous retraction process from initial grasp selection to full ROI exposure across simulations and real-world tests on different deformable materials.
What carries the argument
The learning-based adaptive controller that optimizes inputs by tracking visual boundary changes, paired with a deep deformation estimation model trained on simulation data to select grasps and maintain safety and convergence.
If this is right
- The framework completes the autonomous retraction process from initial grasp selection to full ROI exposure.
- It exhibits zero-shot adaptation to similar tasks on different deformable materials without retraining.
- Performance holds across both simulation environments and physical experiments on varied tissues.
- The method carries potential for direct use in actual surgical assistance scenarios.
Where Pith is reading between the lines
- The visual-boundary monitoring technique could combine with force or ultrasound sensing to handle cases with poor camera views.
- Scaling the simulation training to include biological tissue properties might reduce the gap to clinical deployment.
- Similar adaptive controllers could apply to other soft-body robotics tasks such as gentle grasping or folding in non-surgical settings.
- If the zero-shot property generalizes further, the approach might lower the data-collection burden for deploying robots in variable human tissues.
Load-bearing premise
The deep deformation estimation model trained only on simulation data will produce grasp points and deformation predictions accurate and safe enough for the adaptive controller to converge on real, unseen deformable tissues without instability or damage.
What would settle it
A real-world trial on a new deformable material where the system selects an unsafe grasp or the controller fails to reach full exposure without tissue damage or divergence would disprove reliable zero-shot adaptation.
Figures








read the original abstract
In various surgical procedures, regions of interest (ROIs) such as organs or lesions are often occluded by overlying tissues, requiring surgeons to achieve adequate exposure for precise intervention. However, the irregular geometry, nonlinear biomechanical properties of overlying tissues, and limited intraoperative visibility of the ROI pose significant challenges to the autonomous execution of tissue retraction. To address this, we formulate a realistic model of the tissue retraction task and propose a learning-based adaptive control framework for achieving ROI exposure. The method optimizes control inputs online by monitoring changes in the visual boundary of the tissue, while leveraging a deep deformation estimation model trained on simulation data to identify the optimal grasping point and ensure the convergence and safety of the adaptive controller. Through simulations and real-world experiments on different deformable materials, it has been demonstrated that this framework exhibits zero-shot adaptation to similar tasks and can complete the autonomous retraction process, from initial grasp selection to full ROI exposure. Therefore, it has the potential to be applied in actual surgical assistance scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a learning-based adaptive control framework for autonomous surgical tissue retraction to expose occluded regions of interest (ROIs) on deformable tissues. It integrates a deep deformation estimation model trained exclusively on simulation data for optimal grasp-point selection with an online adaptive controller that monitors visual boundary changes to optimize inputs for convergence and safety. Through simulations and real-world experiments on different deformable materials, the authors claim the framework achieves zero-shot adaptation to similar tasks and completes the full autonomous retraction process from initial grasp to full ROI exposure.
Significance. If the sim-to-real transfer of the deformation estimator proves sufficiently accurate, the work could advance autonomous surgical robotics by enabling safe, adaptive retraction without per-tissue retraining, addressing a practical challenge in procedures with limited visibility. The combination of learning-based estimation and boundary-monitoring adaptive control offers a plausible path toward reduced manual intervention, though the absence of quantitative validation currently limits assessment of its reliability and generalizability.
major comments (2)
- [Abstract] Abstract and experimental claims: the assertion of zero-shot adaptation and safe controller convergence on real unseen tissues rests on the deep deformation estimation model producing grasp points and predictions accurate enough for the visual-boundary loop to guarantee convergence without instability or damage, yet no quantitative real-world error statistics, domain-gap quantification, or failure-mode analysis for the estimator are provided, leaving the central safety and adaptation claim unevaluable.
- [Experiments] Experimental validation: the manuscript reports successful completion of the retraction process across materials but supplies no metrics (e.g., retraction time, exposure completeness, peak tissue strain, or prediction error on real data), no baselines, and no ablation on the deformation model, so the strength of the zero-shot claim cannot be assessed against the weakest assumption that sim-trained outputs remain within the adaptive law's basin of attraction.
minor comments (2)
- [Abstract] Clarify the precise definition of 'similar tasks' in the zero-shot claim and whether it encompasses changes in tissue stiffness, geometry, or occlusion depth.
- [Figures] Ensure all figures showing real-world retraction sequences include scale bars, time stamps, and explicit indication of predicted vs. observed deformation boundaries for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We acknowledge the need for stronger quantitative support of our zero-shot adaptation and safety claims and will revise the manuscript to address these points.
read point-by-point responses
-
Referee: [Abstract] Abstract and experimental claims: the assertion of zero-shot adaptation and safe controller convergence on real unseen tissues rests on the deep deformation estimation model producing grasp points and predictions accurate enough for the visual-boundary loop to guarantee convergence without instability or damage, yet no quantitative real-world error statistics, domain-gap quantification, or failure-mode analysis for the estimator are provided, leaving the central safety and adaptation claim unevaluable.
Authors: We agree that quantitative validation is required to substantiate the zero-shot and safety claims. The current manuscript presents qualitative success across real deformable materials but lacks the requested statistics. In the revised version we will add real-world prediction error metrics for the deformation estimator, a quantitative domain-gap analysis between simulation and real data, and a dedicated failure-mode discussion to allow proper evaluation of estimator accuracy and controller robustness. revision: yes
-
Referee: [Experiments] Experimental validation: the manuscript reports successful completion of the retraction process across materials but supplies no metrics (e.g., retraction time, exposure completeness, peak tissue strain, or prediction error on real data), no baselines, and no ablation on the deformation model, so the strength of the zero-shot claim cannot be assessed against the weakest assumption that sim-trained outputs remain within the adaptive law's basin of attraction.
Authors: We accept that the experimental section would benefit from explicit metrics and comparisons. The existing results demonstrate feasibility on multiple materials, yet we will augment the revision with quantitative measures including retraction time, exposure completeness, peak tissue strain, and real-data prediction error. We will also incorporate baseline comparisons and an ablation study isolating the contribution of the deformation model to better quantify the zero-shot performance and the adaptive controller's tolerance to estimation error. revision: yes
Circularity Check
No circularity: derivation relies on external sim-to-real validation chain
full rationale
The paper trains a deep deformation estimation model exclusively on simulation data, then deploys it for grasp selection and to support an online adaptive controller that monitors visual boundaries. The reported success on real deformable tissues is evaluated through separate simulation and physical experiments rather than any fitted parameter or prediction that is defined by the same experimental outcomes. No equations, self-citations, or ansatzes are shown that reduce the zero-shot adaptation claim to a tautology or to quantities fitted from the target results themselves. The framework therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Simulation data sufficiently captures the nonlinear biomechanical behavior of real deformable tissues for grasp selection and controller convergence.
Reference graph
Works this paper leans on
-
[1]
Farshid Alambeigi, Zerui Wang, Yun-hui Liu, Russell H Taylor, and Mehran Armand. Toward semi-autonomous cryoablation of kidney tumors via model-independent deformable tissue manipulation technique.Annals of Biomedical Engineering, 46(10):1650–1662, 2018. doi: 10.1007/s10439-018-2074-y
-
[2]
Aleks Attanasio, Bruno Scaglioni, Matteo Leonetti, Ale- jandro F Frangi, William Cross, Chandra Shekhar Biyani, and Pietro Valdastri. Autonomous tissue retraction in robotic assisted minimally invasive surgery–a feasibility study.IEEE Robotics and Automation Letters, 5(4): 6528–6535, 2020. doi: 10.1109/LRA.2020.3013914
-
[3]
Swastika Chatterjee, Soumyajit Das, Karabi Ganguly, and Dibyendu Mandal. Advancements in robotic surgery: innovations, challenges and future prospects.Journal of Robotic Surgery, 18(1):28, 2024. doi: 10.1007/ s11701-023-01801-w
work page 2024
-
[4]
A novel model-independent approach for au- tonomous retraction of soft tissue
Jiaqi Chen, Longfei Ma, Xinran Zhang, and Hongen Liao. A novel model-independent approach for au- tonomous retraction of soft tissue. In12th Asian- Pacific Conference on Medical and Biological Engi- neering, pages 83–90. Springer, 2024. doi: 10.1007/ 978-3-031-51485-2 10
work page 2024
-
[5]
Jiaqi Chen, Guochen Ning, Longfei Ma, and Hongen Liao. Autonomous Deformable Tissue Retraction System Based on 2D Visual Representation and Asymmetric Reinforcement Learning for Robotic Surgery.IEEE Transactions on Medical Robotics and Bionics, 7(2):595– 606, 2025. doi: 10.1109/TMRB.2025.3560399
-
[6]
Aukje De Boer, Martijn S Van der Schoot, and Hester Bijl. Mesh deformation based on radial basis function interpolation.Computers & Structures, 85(11):784–795,
-
[7]
doi: 10.1016/j.compstruc.2007.01.013
-
[8]
Yuanming Hu, Tzu-Mao Li, Luke Anderson, Jonathan Ragan-Kelley, and Fr´edo Durand. Taichi: a language for high-performance computation on spatially sparse data structures.ACM Transactions on Graphics (TOG), 38 (6):1–16, 2019. doi: 10.1145/3355089.3356506
-
[9]
Alireza Karimi, Mahdi Navidbakhsh, and Hossein Yousefi. Mechanical properties of polyvinyl alcohol sponge under different strain rates.International Journal of Materials Research, 105(4):404–408, 2014. doi: 10.3139/146.111036
-
[10]
Adam: A Method for Stochastic Optimization
Diederik P Kingma. Adam: A method for stochastic optimization.arXiv preprint arXiv:1412.6980, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[11]
Abdelouahed Kouibia, Pedro Gonz ´alez, Miguel Pasadas, Bassim Mustafa, Hossain Oulad Yakhlef, and Loubna Omri. Approximation of bivariate functions by gener- alized Wendland radial basis functions.Mathematics, 12 (16):2597, 2024. doi: 10.3390/math12162597
-
[12]
Romain Lagneau, Alexandre Krupa, and Maud Mar- chal. Active deformation through visual servoing of soft objects. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 8978–8984. IEEE, 2020. doi: 10.1109/ICRA40945.2020.9197506
-
[13]
Romain Lagneau, Alexandre Krupa, and Maud Mar- chal. Automatic shape control of deformable wires based on model-free visual servoing.IEEE Robotics and Automation Letters, 5(4):5252–5259, 2020. doi: 10.1109/LRA.2020.3007114
-
[14]
In: 2025 IEEE International Conference on Robotics and Automation (ICRA), pp
Jiayi Liu, Sihang Yang, Yiwei Wang, Huan Zhao, and Han Ding. Autonomous Bimanual Manipulation of Deformable Objects Using Deep Reinforcement Learning Guided Adaptive Control. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 6904–6910. IEEE, 2025. doi: 10.1109/ICRA55743.2025. 11127676
-
[15]
Yonghao Long, Anran Lin, Derek Hang Chun Kwok, Lin Zhang, Zhenya Yang, Kejian Shi, Lei Song, Jiawei Fu, Hongbin Lin, Wang Wei, et al. Surgical embodied intelligence for generalized task autonomy in laparo- scopic robot-assisted surgery.Science Robotics, 10(104): eadt3093, 2025. doi: 10.1126/scirobotics.adt3093
-
[16]
Autonomous tissue retraction with a biomechanically informed logic based frame- work
Daniele Meli, Eleonora Tagliabue, Diego Dall’Alba, and Paolo Fiorini. Autonomous tissue retraction with a biomechanically informed logic based frame- work. In2021 International Symposium on Medical Robotics (ISMR), pages 1–7. IEEE, 2021. doi: 10.1109/ ISMR48346.2021.9661573
-
[17]
Tetrahedral mass spring model for fast soft tissue deformation
Wouter Mollemans, Filip Schutyser, Johan Van Cley- nenbreugel, and Paul Suetens. Tetrahedral mass spring model for fast soft tissue deformation. InInterna- tional Symposium on Surgery Simulation and Soft Tis- sue Modeling, pages 145–154. Springer, 2003. doi: 10.1007/3-540-45015-7 14
-
[18]
Model-free visually servoed defor- mation control of elastic objects by robot manipulators
David Navarro-Alarcon, Yun-Hui Liu, Jos ´e Guadalupe Romero, and Peng Li. Model-free visually servoed defor- mation control of elastic objects by robot manipulators. IEEE Transactions on Robotics, 29(6):1457–1468, 2013. doi: 10.1109/TRO.2013.2275651
-
[19]
David Navarro-Alarcon, Hiu Man Yip, Zerui Wang, Yun- Hui Liu, Fangxun Zhong, Tianxue Zhang, and Peng Li. Automatic 3-d manipulation of soft objects by robotic arms with an adaptive deformation model.IEEE Transactions on Robotics, 32(2):429–441, 2016. doi: 10.1109/TRO.2016.2533639
-
[20]
Toward automated tissue retraction in robot-assisted surgery
Sachin Patil and Ron Alterovitz. Toward automated tissue retraction in robot-assisted surgery. In2010 IEEE International Conference on Robotics and Automation (ICRA), pages 2088–2094. IEEE, 2010. doi: 10.1109/ ROBOT.2010.5509607
-
[21]
Patient-specific biomechanical modeling for guidance during minimally-invasive hepatic surgery
Rosalie Plantefeve, Igor Peterlik, Nazim Haouchine, and St´ephane Cotin. Patient-specific biomechanical modeling for guidance during minimally-invasive hepatic surgery. Annals of Biomedical Engineering, 44(1):139–153, 2016. doi: 10.1007/s10439-015-1419-z
-
[22]
In: 2021 IEEE/RSJ In- ternational Conference on Intelligent Robots and Systems (IROS)
Ameya Pore, Davide Corsi, Enrico Marchesini, Diego Dall’Alba, Alicia Casals, Alessandro Farinelli, and Paolo Fiorini. Safe reinforcement learning using formal ver- ification for tissue retraction in autonomous robotic- assisted surgery. In2021 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS), pages 4025–4031. IEEE, 2021. doi: 1...
-
[23]
Autonomous tissue retraction with a biomechanically informed logic based frame- work
Ameya Pore, Eleonora Tagliabue, Marco Piccinelli, Diego Dall’Alba, Alicia Casals, and Paolo Fiorini. Learn- ing from demonstrations for autonomous soft-tissue re- traction. In2021 International Symposium on Med- ical Robotics (ISMR), pages 1–7. IEEE, 2021. doi: 10.1109/ISMR48346.2021.9661514
-
[24]
The research of soft tissue deformation based on mass-spring model
Bing Qiao, Gang Chen, and Xiufen Ye. The research of soft tissue deformation based on mass-spring model. In2009 International Conference on Mechatronics and Automation, pages 4655–4660. IEEE, 2009. doi: 10. 1109/ICMA.2009.5244785
-
[25]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Ro- man R ¨adle, Chloe Rolland, Laura Gustafson, et al. Sam 2: Segment anything in images and videos.arXiv preprint arXiv:2408.00714, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[26]
Hamed Saeidi, Justin D Opfermann, Michael Kam, Shuwen Wei, Simon L ´eonard, Michael H Hsieh, Jin U Kang, and Axel Krieger. Autonomous robotic la- paroscopic surgery for intestinal anastomosis.Science Robotics, 7(62):eabj2908, 2022. doi: 10.1126/scirobotics. abj2908
-
[27]
Paul Maria Scheikl, Eleonora Tagliabue, Bal ´azs Gyenes, Martin Wagner, Diego Dall’Alba, Paolo Fiorini, and Franziska Mathis-Ullrich. Sim-to-real transfer for visual reinforcement learning of deformable object manipu- lation for robot-assisted surgery.IEEE Robotics and Automation Letters, 8(2):560–567, 2023. doi: 10.1109/ LRA.2022.3227873
-
[28]
Alexander Sch ¨ußler, Christian Kunz, Rayan Younis, Ben- jamin Alt, Jamie Paik, Martin Wagner, and Franziska Mathis-Ullrich. Semi-Autonomous Robotic Assistance for Gallbladder Retraction in Surgery.IEEE Robotics and Automation Letters, 10(7):7468–7475, 2025. doi: 10.1109/LRA.2025.3577430
-
[29]
Eleonora Tagliabue, Daniele Meli, Diego Dall’Alba, and Paolo Fiorini. Deliberation in autonomous robotic surgery: a framework for handling anatomical uncer- tainty. In2022 International Conference on Robotics and Automation (ICRA), pages 11080–11086. IEEE, 2022. doi: 10.1109/ICRA46639.2022.9811820
-
[30]
Bao Thach, Brian Y Cho, Alan Kuntz, and Tucker Hermans. Learning visual shape control of novel 3D deformable objects from partial-view point clouds. In 2022 International Conference on Robotics and Au- tomation (ICRA), pages 8274–8281. IEEE, 2022. doi: 10.1109/ICRA46639.2022.9812215
-
[31]
Bao Thach, Brian Y Cho, Shing-Hei Ho, Tucker Her- mans, and Alan Kuntz. Deformernet: Learning bimanual manipulation of 3d deformable objects.arXiv preprint arXiv:2305.04449, 2024
-
[32]
Bao Thach, Siyeon Kim, Britton Jordan, Mohanraj Shan- thi, Tanner Watts, Shing-Hei Ho, James M Ferguson, Tucker Hermans, and Alan Kuntz. DefFusionNet: Learn- ing Multimodal Goal Shapes for Deformable Object Manipulation via a Diffusion-based Probabilistic Model. arXiv preprint arXiv:2506.18779, 2025
-
[33]
Compact support radial basis functions for soft tissue deformation
Mark P Wachowiak, Xiaogang Wang, Aaron Fenster, and Terry M Peters. Compact support radial basis functions for soft tissue deformation. In2004 2nd IEEE International Symposium on Biomedical Imaging: Nano to Macro (IEEE Cat No. 04EX821), pages 1259–1262. IEEE, 2004. doi: 10.1109/ISBI.2004.1398774
-
[34]
Holger Wendland. Error estimates for interpolation by compactly supported radial basis functions of minimal degree.Journal of Approximation Theory, 93(2):258– 272, 1998. doi: 10.1006/jath.1997.3137
-
[35]
Bohan Yang, Bo Lu, Wei Chen, Fangxun Zhong, and Yun-Hui Liu. Model-free 3-d shape control of de- formable objects using novel features based on modal analysis.IEEE Transactions on Robotics, 39(4):3134– 3153, 2023. doi: 10.1109/TRO.2023.3269347
-
[36]
Bohan Yang, Congying Sui, Fangxun Zhong, and Yun- Hui Liu. Modal-graph 3D shape servoing of deformable objects with raw point clouds.The International Journal of Robotics Research, 42(14):1213–1244, 2023. doi: 10. 1177/02783649231198900
work page 2023
-
[37]
Mingrui Yu, Kangchen Lv, Hanzhong Zhong, Shiji Song, and Xiang Li. Global model learning for large defor- mation control of elastic deformable linear objects: An efficient and adaptive approach.IEEE Transactions on Robotics, 39(1):417–436, 2023. doi: 10.1109/TRO.2022. 3200546
-
[38]
Fangxun Zhong, Yaqing Wang, Zerui Wang, and Yun-Hui Liu. Dual-arm robotic needle insertion with active tissue deformation for autonomous suturing.IEEE Robotics and Automation Letters, 4(3):2669–2676, 2019. doi: 10. 1109/LRA.2019.2913082. APPENDIX I. PARAMETERIZATION OF3D TISSUEBOUNDARIES In the main text, we introduced the use of Wendland radial basis fun...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.