Steins;Gate Drive: Semantic Safety Arbitration over Structured Futures for Latency-Decoupled LLM Planning
Pith reviewed 2026-05-22 05:35 UTC · model grok-4.3
The pith
SteinsGateDrive decouples LLM latency from vehicle control by pre-selecting structured futures with runtime safety checks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
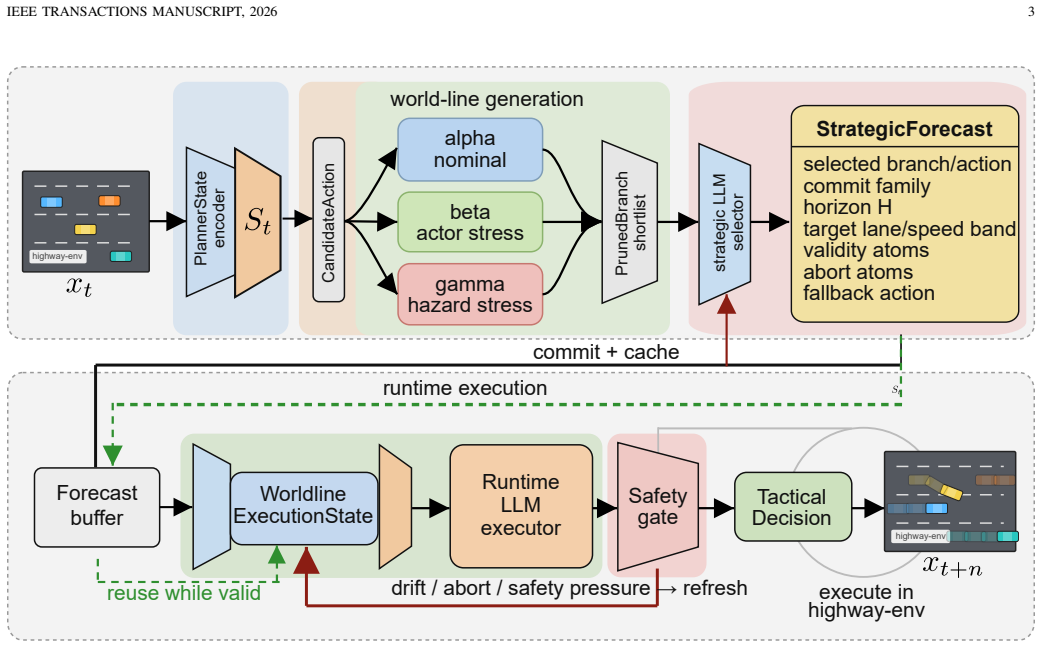
The paper claims that structuring LLM output into three world-line roles (alpha nominal ego futures, beta interaction counterfactuals, gamma hazard-stress futures) and packaging the chosen branch as a StrategicForecast enables the runtime to reuse the precomputed trajectory safely. Safety is enforced by atom-predicate checks rather than by forecast accuracy or drift scores. On a matched-seed normal-highway protocol the system reduces measured effective lag from +3.07 s at a 1-second horizon to -0.01 s at a 4-second horizon while the no-collision boundary remains intact.
What carries the argument
The StrategicForecast, a typed structure that encodes a selected worldline together with its horizon, validity/abort conditions, fallback action, and authority level so the runtime can decide when reuse is still safe.
If this is right
- Safety is preserved by the runtime atom-predicate checks, not by the drift score which only sets refresh frequency.
- Effective lag decreases with longer horizons under the tested normal-highway protocol.
- The three world-line roles let the LLM consider nominal, interaction, and hazard futures in one structured generation step.
Where Pith is reading between the lines
- The same separation of pre-selection and runtime checking could be applied to other latency-sensitive control tasks such as robotic manipulation or drone navigation.
- Adding richer predicates to the runtime checks might extend safe reuse into more dynamic urban or adverse-weather settings.
- A hybrid system could combine this long-horizon semantic layer with fast local controllers for immediate corrections.
Load-bearing premise
The selected StrategicForecast remains valid under atom-predicate runtime checks for the full horizon, allowing safe reuse of the precomputed future without immediate re-inference from the LLM.
What would settle it
An experiment in which an unexpected cut-in or brake event occurs inside the forecast horizon, the atom-predicate check fails to trigger an abort, and a collision or safety-boundary breach is recorded.
Figures

read the original abstract
Cloud-hosted LLM driver agents provide useful semantic judgments, but their inference latency exceeds stepwise vehicle-control windows. Learned world models predict futures, but they usually keep future generation and action selection inside large coupled loops. We present SteinsGateDrive, a latency-decoupled planner-runtime architecture in which the worldline metaphor from the eponymous story names one plausible consequence of an intervention: the LLM selects counterfactual driving futures before the final control instant, and a runtime reuses the selected forecast only while safety contracts remain valid. The generator builds three world-line roles: alpha nominal ego-conditioned futures, beta interaction counterfactuals around nearby vehicles, and gamma hazard-stress futures such as braking, cut-ins, or blocked corridors. The selected branch becomes a typed StrategicForecast with horizon, validity/abort conditions, fallback, and authority. On a within-subject, matched-seed normal-highway protocol with 10 seeds and 20 steps, GPT-5.4 mini reduces effective lag from +3.07 s at 1-second horizon to -0.01 s at 4-second horizon while preserving the measured no-collision safety boundary. The architecture's safety contribution comes from the atom-predicate runtime check, not from the drift score, which functions as a refresh-frequency knob.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents Steins;Gate Drive, a latency-decoupled planner-runtime architecture for LLM-based autonomous driving. It precomputes structured counterfactual futures (alpha nominal ego-conditioned, beta interaction, and gamma hazard-stress such as braking or cut-ins) via the LLM, packages the selected branch as a typed StrategicForecast with horizon, validity/abort conditions, and fallback, and reuses it at runtime under atom-predicate safety checks. On a within-subject matched-seed normal-highway protocol (10 seeds, 20 steps), GPT-5.4 mini is reported to reduce effective lag from +3.07 s at 1 s horizon to -0.01 s at 4 s horizon while preserving the measured no-collision boundary; safety is attributed to the runtime atom-predicate check rather than the drift score.
Significance. If the runtime arbitration proves robust, the architecture offers a practical route to deploying high-latency semantic LLMs in real-time vehicle control by separating precomputed futures from stepwise execution. The explicit handling of nominal, interaction, and hazard futures plus the typed StrategicForecast contract provides a clean separation of concerns that could influence latency-sensitive robotics planning.
major comments (2)
- The central safety claim—that the no-collision boundary is preserved by the atom-predicate runtime check—rests on the assumption that the pre-selected StrategicForecast remains valid for the full horizon. However, the reported protocol is explicitly limited to normal-highway scenarios; the manuscript describes gamma hazard futures but does not state that any braking, cut-in, or blocked-corridor events were injected or encountered across the 10 seeds. Consequently the arbitration/abort path that the architecture claims to rely on was never exercised.
- The quantitative lag-reduction result (from +3.07 s to -0.01 s) is presented without error bars, baseline comparisons to coupled LLM or classical planners, statistical tests, raw data, or exclusion criteria. This leaves the support for both the lag improvement and the preserved safety boundary only partially verifiable from the given protocol description.
minor comments (2)
- Clarify the model name 'GPT-5.4 mini' in the abstract and results; if it is a hypothetical or internal variant, state the underlying base model and any fine-tuning details.
- The introduction of 'StrategicForecast' and the worldline roles would benefit from an early formal definition or schematic diagram to make the typed contract (horizon, validity/abort, fallback, authority) immediately clear to readers.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment point by point below, clarifying the current scope of the evaluation while committing to targeted revisions that strengthen the manuscript without overstating the existing results.
read point-by-point responses
-
Referee: The central safety claim—that the no-collision boundary is preserved by the atom-predicate runtime check—rests on the assumption that the pre-selected StrategicForecast remains valid for the full horizon. However, the reported protocol is explicitly limited to normal-highway scenarios; the manuscript describes gamma hazard futures but does not state that any braking, cut-in, or blocked-corridor events were injected or encountered across the 10 seeds. Consequently the arbitration/abort path that the architecture claims to rely on was never exercised.
Authors: We agree that the experimental protocol described in the manuscript is restricted to normal-highway scenarios and that no hazard events (braking, cut-ins, or blocked corridors) were injected or observed across the 10 seeds. The reported results therefore demonstrate that the atom-predicate runtime checks preserve the no-collision boundary under these nominal conditions while enabling latency decoupling. The gamma futures are generated by the LLM as part of the StrategicForecast but remain untriggered in the current evaluation. We acknowledge that this leaves the arbitration and abort mechanisms unexercised in the presented data. To address this limitation, the revised manuscript will incorporate an extended protocol that injects controlled hazard events and reports the frequency and outcomes of abort triggers. revision: yes
-
Referee: The quantitative lag-reduction result (from +3.07 s to -0.01 s) is presented without error bars, baseline comparisons to coupled LLM or classical planners, statistical tests, raw data, or exclusion criteria. This leaves the support for both the lag improvement and the preserved safety boundary only partially verifiable from the given protocol description.
Authors: We concur that the quantitative results would benefit from greater statistical transparency. The reported lag figures are means computed over the 10 matched seeds in the within-subject protocol. In the revision we will add error bars (standard deviation across seeds), include a direct baseline comparison against a coupled LLM planner executing under identical conditions, report appropriate statistical tests for the observed lag reduction, and document exclusion criteria together with a pointer to the raw per-seed data in the supplementary material. These additions will make both the latency and safety-boundary claims more readily verifiable. revision: yes
Circularity Check
No significant circularity; architecture and result presented as design plus empirical observation without reduction to inputs.
full rationale
The paper presents SteinsGateDrive as a latency-decoupled architecture that selects StrategicForecasts (alpha/beta/gamma worldlines) and reuses them under atom-predicate validity checks. The headline empirical result (lag reduction from +3.07 s to -0.01 s while preserving no-collision boundary) is reported on an explicitly normal-highway, matched-seed protocol. No equations, fitted parameters, or self-citations are shown to define the safety contribution or lag metric by construction; the safety attribution is stated as coming from the runtime check rather than any drift score or pre-fit. The derivation chain consists of architectural choices and an observational protocol rather than a closed mathematical loop that reproduces its own inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- planning horizons (1 s and 4 s)
axioms (1)
- domain assumption LLM-generated counterfactual futures can be meaningfully typed and validated by simple atom-predicates at runtime.
invented entities (1)
-
StrategicForecast
no independent evidence
Reference graph
Works this paper leans on
-
[1]
C. Cui, Y . Ma, S.-Y . Park, Z. Yang, Y . Zhou, J. Lu, J. Peng, J. Zhang, R. Zhang, L. Li, Y . Chen, J. H. Panchal, A. Abdelraouf, R. Gupta, K. Han, and Z. Wang, “Llm4ad: Large language models for autonomous driving – concept, review, benchmark, experiments, and future trends,”
-
[2]
[Online]. Available: https://arxiv.org/abs/2410.15281
-
[3]
H. Liao, H. Kong, B. Wang, C. Wang, W. Ye, Z. He, C. Xu, and Z. Li, “Cot-drive: Efficient motion forecasting for autonomous driving with llms and chain-of-thought prompting,” 2025. [Online]. Available: https://arxiv.org/abs/2503.07234
-
[4]
Lead: The llm enhanced planning system converged with end-to-end autonomous driving,
Y . Zhang, J. Liu, C. Xu, P. Hang, and J. Sun, “Lead: The llm enhanced planning system converged with end-to-end autonomous driving,” 2025. [Online]. Available: https://arxiv.org/abs/2507.05754
-
[5]
Distilling multi- modal large language models for autonomous driving,
D. Hegde, R. Yasarla, H. Cai, S. Han, A. Bhattacharyya, S. Mahajan, L. Liu, R. Garrepalli, V . M. Patel, and F. Porikli, “Distilling multi- modal large language models for autonomous driving,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025
work page 2025
-
[6]
A survey of world models for autonomous driving,
T. Feng, W. Wang, and Y . Yang, “A survey of world models for autonomous driving,” 2025. [Online]. Available: https://arxiv.org/abs/ 2501.11260
-
[7]
F. Jia, L. Liu, Z. Song, C. Jia, H. Ye, X. Hao, and L. Chen, “Driveworld-vla: Unified latent-space world modeling with vision- language-action for autonomous driving,” 2026. [Online]. Available: https://arxiv.org/abs/2602.06521
-
[8]
GPT-Driver: Learning to Drive with GPT
J. Mao, Y . Qian, J. Ye, H. Zhao, and Y . Wang, “Gpt-driver: Learning to drive with gpt,” 2023. [Online]. Available: https: //arxiv.org/abs/2310.01415
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[9]
Drivegpt4: Interpretable end-to-end autonomous driving via large language model,
Z. Xu, Y . Zhang, E. Xie, Z. Zhao, Y . Guo, K.-Y . K. Wong, Z. Li, and H. Zhao, “Drivegpt4: Interpretable end-to-end autonomous driving via large language model,”IEEE Robotics and Automation Letters, vol. 9, no. 10, pp. 8186–8193, 2024
work page 2024
-
[10]
Dilu: A knowledge-driven approach to au- tonomous driving with large language models
L. Wen, D. Fu, X. Li, X. Cai, T. Ma, P. Cai, M. Dou, B. Shi, L. He, and Y . Qiao, “Dilu: A knowledge-driven approach to autonomous driving with large language models,” inInternational Conference on Learning Representations (ICLR), 2024, arXiv:2309.16292
-
[11]
Planning- oriented autonomous driving,
Y . Hu, J. Yang, L. Chen, K. Li, C. Sima, X. Zhu, S. Chai, S. Du, T. Lin, W. Wang, L. Lu, X. Jia, Q. Liu, J. Dai, Y . Qiao, and H. Li, “Planning- oriented autonomous driving,” inProceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition (CVPR), June 2023, pp. 17 853–17 862
work page 2023
-
[12]
Vad: Vectorized scene representation for efficient autonomous driving,
B. Jiang, S. Chen, Q. Xu, B. Liao, J. Chen, H. Zhou, Q. Zhang, W. Liu, C. Huang, and X. Wang, “Vad: Vectorized scene representation for efficient autonomous driving,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), October 2023, pp. 8340–8350
work page 2023
-
[13]
GAIA-1: A Generative World Model for Autonomous Driving
A. Hu, L. Russell, H. Yeo, Z. Murez, G. Fedoseev, A. Kendall, J. Shotton, and G. Corrado, “Gaia-1: A generative world model for autonomous driving,” 2023. [Online]. Available: https://arxiv.org/abs/ 2309.17080
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[14]
Learning unsupervised world models for autonomous driving via discrete diffusion,
L. Zhang, Y . Xiong, Z. Yang, S. Casas, R. Hu, and R. Urtasun, “Copilot4d: Learning unsupervised world models for autonomous driving via discrete diffusion,” 2023. [Online]. Available: https: //arxiv.org/abs/2311.01017
-
[15]
X. Wang, Z. Zhu, G. Huang, X. Chen, J. Zhu, and J. Lu, “Drivedreamer: Towards real-world-driven world models for autonomous driving,” 2023. [Online]. Available: https://arxiv.org/abs/2309.09777
-
[16]
Drivedreamer-2: Llm-enhanced world models for diverse driving video generation,
G. Zhao, X. Wang, Z. Zhu, X. Chen, G. Huang, X. Bao, and X. Wang, “Drivedreamer-2: Llm-enhanced world models for diverse driving video generation,” 2024. [Online]. Available: https://arxiv.org/abs/2403.06845
-
[17]
Genad: Generative end-to-end autonomous driving.arXiv preprint arXiv: 2402.11502, 2024
W. Zheng, R. Song, X. Guo, C. Zhang, and L. Chen, “Genad: Generative end-to-end autonomous driving,” 2024. [Online]. Available: https://arxiv.org/abs/2402.11502
-
[18]
Y . Yang, J. Mei, Y . Ma, S. Du, W. Chen, Y . Qian, Y . Feng, and Y . Liu, “Driving in the occupancy world: Vision-centric 4d occupancy forecasting and planning via world models for autonomous driving,”
-
[19]
Available: https://arxiv.org/abs/2408.14197
[Online]. Available: https://arxiv.org/abs/2408.14197
-
[20]
D. Ha and J. Schmidhuber, “World models,” inAdvances in Neural Information Processing Systems, vol. 31, 2018
work page 2018
-
[21]
Dream to control: Learning behaviors by latent imagination,
D. Hafner, T. Lillicrap, J. Ba, and M. Norouzi, “Dream to control: Learning behaviors by latent imagination,” inInternational Conference on Learning Representations, 2020
work page 2020
-
[22]
Enhancing End-to-End Autonomous Driving with Latent World Model
Y . Li, L. Fan, J. He, Y . Wang, Y . Chen, Z. Zhang, and T. Tan, “Enhancing end-to-end autonomous driving with latent world model,” inInternational Conference on Learning Representations (ICLR), 2025, arXiv:2406.08481
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[23]
Y . Zheng, P. Yang, Z. Xing, Q. Zhang, Y . Zheng, Y . Gao, P. Li, T. Zhang, Z. Xia, P. Jia, X. Lang, and D. Zhao, “World4drive: End-to-end autonomous driving via intention-aware physical latent world model,” in Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), October 2025, pp. 28 632–28 642, arXiv:2507.00603
-
[24]
E. F. Camacho and C. Bordons,Model Predictive Control, ser. Advanced Textbooks in Control and Signal Processing. Springer London, 2007
work page 2007
-
[25]
On a Formal Model of Safe and Scalable Self-driving Cars
S. Shalev-Shwartz, S. Shammah, and A. Shashua, “On a formal model of safe and scalable self-driving cars,” 2017. [Online]. Available: https://arxiv.org/abs/1708.06374
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[26]
A comparison of headway and time to collision as safety indicators,
K. V ogel, “A comparison of headway and time to collision as safety indicators,”Accident Analysis & Prevention, vol. 35, no. 3, pp. 427– 433, 2003
work page 2003
-
[27]
An environment for autonomous driving decision-making,
E. Leurent, “An environment for autonomous driving decision-making,” https://github.com/eleurent/highway-env, 2018. [Online]. Available: https://highway-env.farama.org/
work page 2018
-
[28]
Congested traffic states in empirical observations and microscopic simulations,
M. Treiber, A. Hennecke, and D. Helbing, “Congested traffic states in empirical observations and microscopic simulations,”Physical Review E, vol. 62, no. 2, pp. 1805–1824, 2000. Anjie Qiureceived the B.S. degrees from Fuzhou University, Fujian, China, and the Technical Univer- sity of Kaiserslautern, Germany, in 2018, and the M.S. degree from the Universi...
work page 2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.