Soft Pneumatic Actuators for Soft Robotics: A Motion-Based Review of Actuation Mechanisms and Performance Trade-offs
Pith reviewed 2026-06-29 23:46 UTC · model grok-4.3
The pith
Soft pneumatic actuator motion and performance are determined by chamber shape, reinforcements, folds, and constraints rather than pressure input alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By grouping actuators according to the motion they produce, the structural features that set the deformation path—braid angle, fold geometry, fiber orientation, chamber arrangement, asymmetry, and internal constraint layers—can be linked directly to differences in motion output, force generation, air demand, repeatability, durability, fabrication difficulty, and robotic integration. This classification also identifies the experimental conditions, including pressure, loading, actuator size, pneumatic supply, and hysteresis, that must be considered when selecting or comparing designs.
What carries the argument
Motion-class classification (linear, bending, twisting, omnidirectional) that maps design features like chamber shape and reinforcement placement to performance trade-offs.
If this is right
- Designers can select an actuator motion class first, then tune chamber and reinforcement details to meet specific force or efficiency targets.
- Trade-off maps for air demand and durability become usable for choosing between compact wearable systems and higher-force mobile robots.
- Integration challenges such as hysteresis and repeatability can be anticipated from the structural asymmetry and constraint choices.
- Priorities for fabrication simplicity shift depending on whether linear extension or omnidirectional bending is required.
Where Pith is reading between the lines
- Standardized test protocols could be developed around the motion classes to reduce the comparability problem noted in the review.
- The same structural-feature lens might apply to hybrid actuators that combine two motion classes in one body.
- Scaling laws for actuator size could be tested by holding motion class constant while varying chamber dimensions.
Load-bearing premise
That published studies contain sufficiently comparable data on design features and performance metrics to allow cross-study analysis despite differences in experimental conditions such as pressure, size, and loading.
What would settle it
A controlled replication of several reviewed actuator designs under matched pressure, size, and loading conditions that finds no consistent link between the listed structural features and the reported performance differences.
Figures
read the original abstract
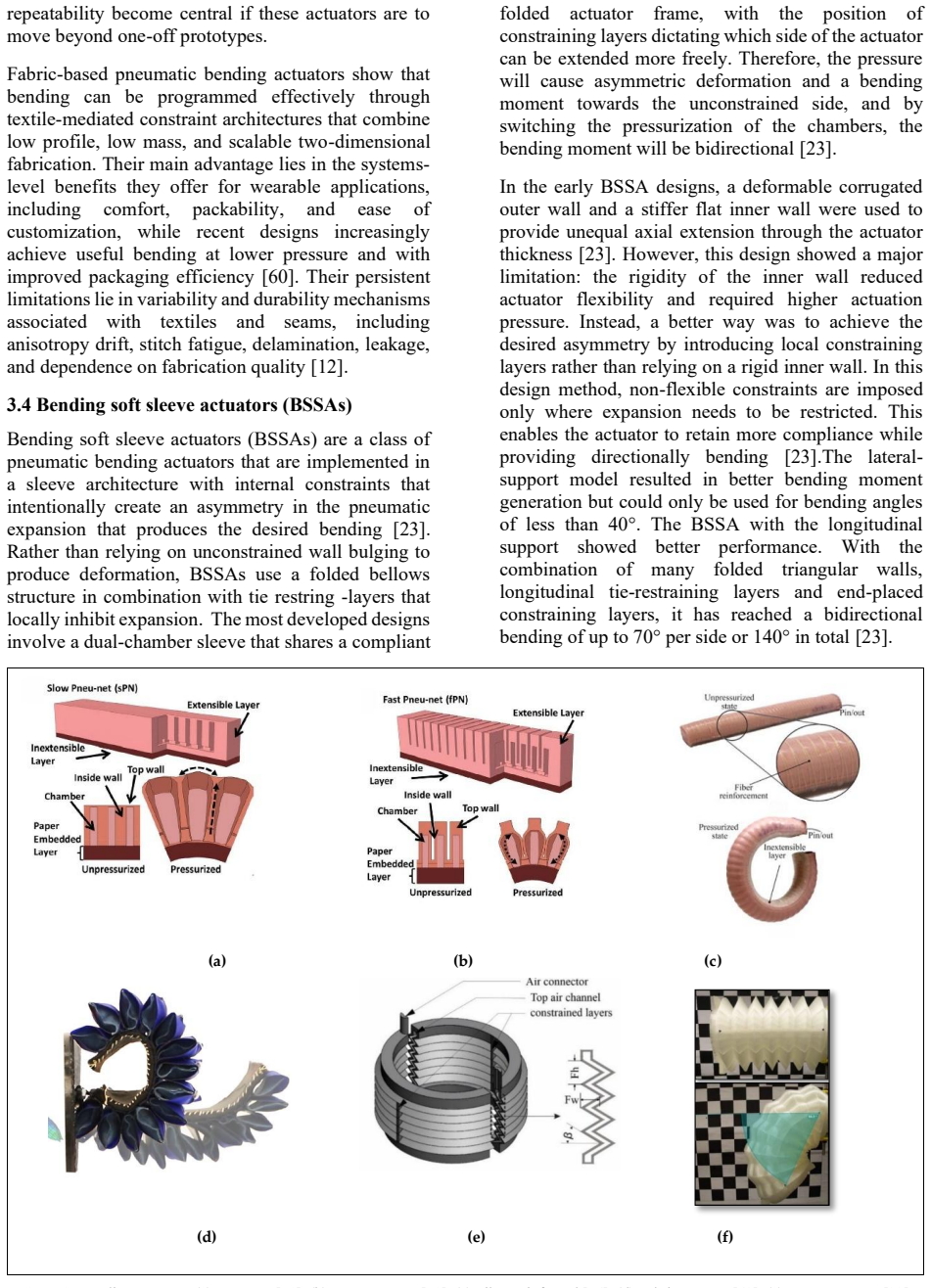
Soft pneumatic actuators are widely used in soft robotics because they can produce large motions while remaining compliant enough to interact safely with objects, environments, and the human body. However, their performance is not solely determined by pressure. Instead, the response depends on the way the actuator is built, including the shape of its chambers, the placement of reinforcements, the use of folds, material stiffness, and the constraints that guide its deformation. As the literature has expanded, it has become more difficult to determine which mechanism is most suitable for a given application and which reported results can be compared across studies. This review examines soft pneumatic actuators according to the design strategies used to generate four motion classes: linear, bending, twisting, and omnidirectional actuation. For each class, it analyzes the structural features that define the deformation path, including braid angle, fold geometry, fiber orientation, chamber arrangement, structural asymmetry, and internal constraint layers. It then discusses how the design choice affect motion output, force generation, air demand, repeatability, durability, fabrication difficulty, and robotic integration. The review further identifies key conditions that must be considered when selecting or comparing actuators, including pressure, loading condition, actuator size, pneumatic supply, and hysteresis This approach helps explain why actuators with similar motion outputs may differ substantially in design requirements, pneumatic demand, and practical suitability. It also highlights the design priorities needed for compact, efficient, repeatable, and deployable soft pneumatic systems in wearable, biomedical, and mobile robotic applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This manuscript is a review that classifies soft pneumatic actuators according to four motion classes (linear, bending, twisting, omnidirectional). For each class it examines structural features (chamber shape, reinforcement placement, folds, material stiffness, constraints, braid angle, fiber orientation, asymmetry) and links them to performance metrics (motion output, force, air demand, repeatability, durability, fabrication difficulty, integration). It also flags experimental conditions (pressure, loading, size, supply, hysteresis) that must be considered when comparing results across studies.
Significance. If the synthesis is valid, the motion-based taxonomy supplies a practical organizing framework for the expanding SPA literature, clarifying how design choices produce different trade-offs and helping researchers select actuators for wearable, biomedical, and mobile applications where compliance and safe interaction matter.
major comments (1)
- [Abstract and review structure] Abstract and review structure: the central trade-off synthesis requires that performance differences can be attributed to the listed structural features rather than uncontrolled variables. The abstract itself notes mismatches in pressure, loading, size, supply, and hysteresis, yet the per-motion-class analysis proceeds without evidence of systematic normalization, standardized benchmarks, or quantitative meta-analysis to support cross-study attribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the review's structure and the challenges of attributing performance differences across heterogeneous studies. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract and review structure] Abstract and review structure: the central trade-off synthesis requires that performance differences can be attributed to the listed structural features rather than uncontrolled variables. The abstract itself notes mismatches in pressure, loading, size, supply, and hysteresis, yet the per-motion-class analysis proceeds without evidence of systematic normalization, standardized benchmarks, or quantitative meta-analysis to support cross-study attribution.
Authors: We agree that the SPA literature is heterogeneous and that uncontrolled variables limit causal attribution. The review is explicitly framed as a qualitative synthesis of reported design-performance relationships drawn from individual studies, not a quantitative meta-analysis. We flag the confounding factors in the abstract and body text precisely to caution against over-interpretation. Where possible, we reference intra-study comparisons that hold experimental conditions relatively constant while varying structural features. A dedicated limitations subsection will be added to the conclusions to further emphasize the absence of normalization and to recommend standardized benchmarks for future work. revision: partial
Circularity Check
No circularity: literature review with no derivations or self-referential predictions
full rationale
This is a review paper that synthesizes existing literature on soft pneumatic actuators by classifying them according to motion types (linear, bending, twisting, omnidirectional) and discussing structural features and performance metrics drawn from cited external studies. No equations, predictions, fitted parameters, or new derivations are present that could reduce to the paper's own inputs. The patterns of self-definitional claims, fitted inputs called predictions, self-citation load-bearing, uniqueness imported from authors, ansatz smuggled via citation, or renaming known results do not apply. While the review acknowledges variability in experimental conditions across studies, this is a standard limitation of qualitative synthesis and does not create circularity under the specified criteria. The central claim rests on external literature rather than internal self-reference.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Design, fabrication and control of soft robots,
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, vol. 521, no. 7553, pp. 467–475, May 2015, doi: 10.1038/nature14543
-
[2]
Use the Force: Review of High-Rate Actuation of Shape Memory Alloys,
A. Dana, S. Vollach, and D. Shilo, “Use the Force: Review of High-Rate Actuation of Shape Memory Alloys,” Actuators, vol. 10, no. 7, p. 140, Jun. 2021, doi: 10.3390/act10070140
-
[3]
Active cooling of twisted coiled actuators via fabric air channels,
A. Lizotte and A. L. Trejos, “Active cooling of twisted coiled actuators via fabric air channels,” Frontiers in Rehabilitation Sciences, vol. 3, Nov. 2022, doi: 10.3389/fresc.2022.1016355
-
[4]
Dielectric elastomer actuators,
E. Hajiesmaili and D. R. Clarke, “Dielectric elastomer actuators,” J. Appl. Phys., vol. 129, no. 15, Apr. 2021, doi: 10.1063/5.0043959
-
[5]
Cable driven exoskeleton for upper-limb rehabilitation: A design review,
J. D. Sanjuan et al., “Cable driven exoskeleton for upper-limb rehabilitation: A design review,” Rob. Auton. Syst., vol. 126, p. 103445, Apr. 2020, doi: 10.1016/j.robot.2020.103445
-
[6]
A survey on soft lower limb cable-driven wearable robots without rigid links and joints,
A. Mahmoudi Khomami and F. Najafi, “A survey on soft lower limb cable-driven wearable robots without rigid links and joints,” Rob. Auton. Syst., vol. 144, p. 103846, 2021, doi: https://doi.org/10.1016/j.robot.2021.103846
-
[7]
C. Thalman and P. Artemiadis, “A review of soft wearable robots that provide active assistance: Trends, common actuation methods, fabrication, and applications,” Wearable Technologies, vol. 1, p. e3, Sep. 2020, doi: 10.1017/wtc.2020.4
-
[8]
M. S. Xavier et al., “Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications,” IEEE Access, vol. 10, pp. 59442–59485, 2022, doi: 10.1109/ACCESS.2022.3179589
-
[9]
Design, fabrication, and measurement of pneumatic soft actuators: A review,
J. Liu, Q. Cheng, T. Sun, Z. Liu, J. Xu, and Y. Wang, “Design, fabrication, and measurement of pneumatic soft actuators: A review,” Sens. Actuators A Phys., vol. 398, p. 117326, Feb. 2026, doi: 10.1016/j.sna.2025.117326
-
[10]
MECHANICS OF BELLOWS: A CRITICAL SURVEY,
J. F. Wilson, “MECHANICS OF BELLOWS: A CRITICAL SURVEY,” 1984
1984
-
[11]
A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application,
B. Kalita, A. Leonessa, and S. K. Dwivedy, “A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application,” Actuators, vol. 11, no. 10, p. 288, Oct. 2022, doi: 10.3390/act11100288
-
[12]
Advances in Fabric-Based Pneumatic Soft Actuators for Flexible Robotics: Design and Applications,
Y. Chai, Y. Qin, Z. Xu, X. Zheng, and H. Jia, “Advances in Fabric-Based Pneumatic Soft Actuators for Flexible Robotics: Design and Applications,” Sensors, vol. 25, no. 12, p. 3665, Jun. 2025, doi: 10.3390/s25123665
-
[13]
Measurement and modeling of McKibben pneumatic artificial muscles,
Ching-Ping Chou and B. Hannaford, “Measurement and modeling of McKibben pneumatic artificial muscles,” IEEE Transactions on Robotics and Automation, vol. 12, no. 1, pp. 90–102, 1996, doi: 10.1109/70.481753
-
[14]
Modelling of the McKibben artificial muscle: A review,
B. Tondu, “Modelling of the McKibben artificial muscle: A review,” J. Intell. Mater. Syst. Struct., vol. 23, no. 3, pp. 225–253, Feb. 2012, doi: 10.1177/1045389X11435435
-
[15]
Modeling and control of McKibben artificial muscle robot actuators,
B. Tondu and P. Lopez, “Modeling and control of McKibben artificial muscle robot actuators,” IEEE Control Syst., vol. 20, no. 2, pp. 15–38, Apr. 2000, doi: 10.1109/37.833638
-
[16]
A Survey on applications of Pneumatic Artificial Muscles,
G. Andrikopoulos, G. Nikolakopoulos, and S. Manesis, “A Survey on applications of Pneumatic Artificial Muscles,” in 2011 19th Mediterranean Conference on Control & Automation (MED), IEEE, Jun. 2011, pp. 1439–1446. doi: 10.1109/MED.2011.5982983
-
[17]
The Concept and Design of Pleated Pneumatic Artificial Muscles,
F. Daerden and D. Lefeber, “The Concept and Design of Pleated Pneumatic Artificial Muscles,” International Journal of Fluid Power, vol. 2, no. 3, pp. 41–50, Jan. 2001, doi: 10.1080/14399776.2001.10781119
-
[18]
S. Terryn, J. Brancart, D. Lefeber, G. Van Assche, and B. Vanderborght, “A Pneumatic Artificial Muscle Manufactured Out of Self-Healing Polymers That Can Repair Macroscopic Damages,” IEEE Robot. Autom. Lett., vol. 3, no. 1, pp. 16–21, Jan. 2018, doi: 10.1109/LRA.2017.2724140
-
[19]
Pleated pneumatic artificial muscles: actuators for automation and robotics,
F. Daerden, D. Lefeber, B. Verrelst, and R. Van Ham, “Pleated pneumatic artificial muscles: actuators for automation and robotics,” in 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Proceedings (Cat. No.01TH8556), IEEE, pp. 738–743. doi: 10.1109/AIM.2001.936758
-
[20]
M. Martens and I. Boblan, “Modeling the Static Force of a Festo Pneumatic Muscle Actuator: A New Approach and a Comparison to Existing Models,” Actuators, vol. 6, no. 4, p. 33, Nov. 2017, doi: 10.3390/act6040033
-
[21]
Recent Developments in Pneumatic Artificial Muscle Actuators,
A. Zhagiparova, V. Golubev, and D. Kim, “Recent Developments in Pneumatic Artificial Muscle Actuators,” Actuators, vol. 14, no. 12, p. 582, Dec. 2025, doi: 10.3390/act14120582
-
[22]
Braided Pneumatic Muscle Actuators,
D. G. Caldwell, A. Razak, and M. Goodwin, “Braided Pneumatic Muscle Actuators,” IFAC Proceedings Volumes, vol. 26, no. 1, pp. 522–527, Apr. 1993, doi: 10.1016/S1474-6670(17)49354-2
-
[23]
Development and Testing of Novel Soft Sleeve Actuators,
M. Abboodi and M. Doumit, “Development and Testing of Novel Soft Sleeve Actuators,” IEEE Access, vol. 12, pp. 39995–40010, 2024, doi: 10.1109/ACCESS.2024.3376407
-
[24]
Twisting Soft Sleeve Actuator: Design and Experimental Evaluation,
M. Abboodi and M. Doumit, “Twisting Soft Sleeve Actuator: Design and Experimental Evaluation,” Electronics (Basel)., vol. 14, no. 20, p. 4020, Oct. 2025, doi: 10.3390/electronics14204020
-
[25]
A Novel Soft Pneumatic Artificial Muscle with High-Contraction Ratio,
K. Han, N.-H. Kim, and D. Shin, “A Novel Soft Pneumatic Artificial Muscle with High-Contraction Ratio,” Soft Robot., vol. 5, no. 5, pp. 554–566, Oct. 2018, doi: 10.1089/soro.2017.0114
-
[26]
Biocompatible micro, soft bellow actuator rapidly manufactured using 3D-printed soluble mold,
W. Jung, Y. Kang, S. Han, and Y. Hwang, “Biocompatible micro, soft bellow actuator rapidly manufactured using 3D-printed soluble mold,” Journal of Micromechanics and Microengineering, vol. 29, no. 12, p. 125005, Dec. 2019, doi: 10.1088/1361-6439/ab477f
-
[27]
PolyJet-Printed Bellows Actuators: Design, Structural Optimization, and Experimental Investigation,
G. Dämmer, S. Gablenz, A. Hildebrandt, and Z. Major, “PolyJet-Printed Bellows Actuators: Design, Structural Optimization, and Experimental Investigation,” Front. Robot. AI, vol. 6, May 2019, doi: 10.3389/frobt.2019.00034
-
[28]
Response surface design of bellows parameters with negative pressure shrinkage performance,
M. Cao, J. Zhu, H. Fu, and H. Y. F. Loic, “Response surface design of bellows parameters with negative pressure shrinkage performance,” International Journal on Interactive Design and Manufacturing (IJIDeM), vol. 16, no. 3, pp. 1041–1052, Sep. 2022, doi: 10.1007/s12008-021-00809-6
-
[29]
Mechanoreception for Soft Robots via Intuitive Body Cues,
L. Wang and Z. Wang, “Mechanoreception for Soft Robots via Intuitive Body Cues,” Soft Robot., vol. 7, no. 2, pp. 198–217, Apr. 2020, doi: 10.1089/soro.2018.0135
-
[30]
Modeling vacuum bellows soft pneumatic actuators with optimal mechanical performance,
W. Felt, M. A. Robertson, and J. Paik, “Modeling vacuum bellows soft pneumatic actuators with optimal mechanical performance,” in 2018 IEEE International Conference on Soft Robotics (RoboSoft), IEEE, Apr. 2018, pp. 534–540. doi: 10.1109/ROBOSOFT.2018.8405381
-
[31]
Hydroforming of Toroidal Bellows: Process Simulation and Quality Control,
M. Ye, H. Li, Y. Wang, and C. Qian, “Hydroforming of Toroidal Bellows: Process Simulation and Quality Control,” Materials, vol. 14, no. 1, p. 142, Dec. 2020, doi: 10.3390/ma14010142
-
[32]
A Soft Robotic Hand Based on Bellows Actuators for Dishwashing Automation,
Z. Wang et al., “A Soft Robotic Hand Based on Bellows Actuators for Dishwashing Automation,” IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 2139– 2146, Apr. 2021, doi: 10.1109/LRA.2021.3061063
-
[33]
Modeling of a soft-rigid gripper actuated by a linear-extension soft pneumatic actuator,
P. Cheng, J. Jia, Y. Ye, and C. Wu, “Modeling of a soft-rigid gripper actuated by a linear-extension soft pneumatic actuator,” Sensors (Switzerland), vol. 21, no. 2, pp. 1–19, Jan. 2021, doi: 10.3390/s21020493
-
[34]
Elastomeric Origami: Programmable Paper‐Elastomer Composites as Pneumatic Actuators,
R. V. Martinez, C. R. Fish, X. Chen, and G. M. Whitesides, “Elastomeric Origami: Programmable Paper‐Elastomer Composites as Pneumatic Actuators,” Adv. Funct. Mater., vol. 22, no. 7, pp. 1376–1384, Apr. 2012, doi: 10.1002/adfm.201102978
-
[35]
Fluid- driven origami-inspired artificial muscles,
S. Li, D. M. Vogt, D. Rus, and R. J. Wood, “Fluid- driven origami-inspired artificial muscles,” Proceedings of the National Academy of Sciences, vol. 114, no. 50, pp. 13132–13137, Dec. 2017, doi: 10.1073/pnas.1713450114
-
[36]
3D Shrinking for Rapid Fabrication of Origami-Inspired Semi-Soft Pneumatic Actuators,
A. Zaghloul and G. M. Bone, “3D Shrinking for Rapid Fabrication of Origami-Inspired Semi-Soft Pneumatic Actuators,” IEEE Access, vol. 8, pp. 191330–191340, 2020, doi: 10.1109/ACCESS.2020.3032131
-
[37]
4D printed origami-inspired accordion, Kresling and Yoshimura tubes,
A. L. Wickeler, K. McLellan, Y.-C. Sun, and H. E. Naguib, “4D printed origami-inspired accordion, Kresling and Yoshimura tubes,” J. Intell. Mater. Syst. Struct., vol. 34, no. 20, pp. 2379–2392, Dec. 2023, doi: 10.1177/1045389X231181940
-
[38]
Y. X. Mak, A. Dijkshoorn, and M. Abayazid, “Design Methodology for a 3D Printable Multi‐ Degree of Freedom Soft Actuator Using Geometric Origami Patterns,” Advanced Intelligent Systems, vol. 6, no. 6, Jun. 2024, doi: 10.1002/aisy.202300666
-
[39]
A crawling robot driven by multi-stable origami,
A. Pagano, T. Yan, B. Chien, A. Wissa, and S. Tawfick, “A crawling robot driven by multi-stable origami,” Smart Mater. Struct., vol. 26, no. 9, p. 094007, Sep. 2017, doi: 10.1088/1361-665X/aa721e
-
[40]
Qualitative synthesis of deformable cylindrical actuators through constraint topology,
S. Hirai, P. Cusin, H. Tanigawa, T. Masui, S. Konishi, and S. Kawamura, “Qualitative synthesis of deformable cylindrical actuators through constraint topology,” in Proceedings. 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000) (Cat. No.00CH37113), IEEE, 2000, pp. 197–202. doi: 10.1109/IROS.2000.894604
-
[41]
Automatic design of fiber-reinforced soft actuators for trajectory matching,
F. Connolly, C. J. Walsh, and K. Bertoldi, “Automatic design of fiber-reinforced soft actuators for trajectory matching,” Proceedings of the National Academy of Sciences, vol. 114, no. 1, pp. 51–56, Jan. 2017, doi: 10.1073/pnas.1615140114
-
[42]
Mechanically programmable bend radius for fiber-reinforced soft actuators,
K. C. Galloway, P. Polygerinos, C. J. Walsh, and R. J. Wood, “Mechanically programmable bend radius for fiber-reinforced soft actuators,” in 2013 16th International Conference on Advanced Robotics (ICAR), IEEE, Nov. 2013, pp. 1–6. doi: 10.1109/ICAR.2013.6766586
-
[43]
Comparison and experimental validation of predictive models for soft, fiber-reinforced actuators,
A. Sedal, A. Wineman, R. B. Gillespie, and C. D. Remy, “Comparison and experimental validation of predictive models for soft, fiber-reinforced actuators,” Int. J. Rob. Res., vol. 40, no. 1, pp. 119– 135, Jan. 2021, doi: 10.1177/0278364919879493
-
[44]
J. Fras and K. Althoefer, “Soft Fiber-Reinforced Pneumatic Actuator Design and Fabrication: Towards Robust, Soft Robotic Systems,” 2019, pp. 103–114. doi: 10.1007/978-3-030-23807-0_9
-
[45]
Adaptive control of a soft pneumatic actuator using experimental characterization data,
Y. X. Mak, H. Naghibi, Y. Lin, and M. Abayazid, “Adaptive control of a soft pneumatic actuator using experimental characterization data,” Front. Robot. AI, vol. 10, Mar. 2023, doi: 10.3389/frobt.2023.1056118
-
[46]
D. Villegas, M. Van Damme, B. Vanderborght, P. Beyl, and D. Lefeber, “Third–Generation Pleated Pneumatic Artificial Muscles for Robotic Applications: Development and Comparison with McKibben Muscle,” Advanced Robotics, vol. 26, no. 11–12, pp. 1205–1227, Jul. 2012, doi: 10.1080/01691864.2012.689722
-
[47]
United States Patent (19) Immega et al. 54 AXIALLY CONTRACTABLE ACTUATOR
G. Immega, “United States Patent (19) Immega et al. 54 AXIALLY CONTRACTABLE ACTUATOR.”
-
[48]
Simulation analysis for optimal design of pneumatic bellow actuators for soft-robotic glove,
N. Guo et al., “Simulation analysis for optimal design of pneumatic bellow actuators for soft-robotic glove,” Biocybern. Biomed. Eng., vol. 40, no. 4, pp. 1359–1368, Oct. 2020, doi: 10.1016/j.bbe.2020.08.002
-
[49]
F. Ilievski, A. D. Mazzeo, R. F. Shepherd, X. Chen, and G. M. Whitesides, “Soft Robotics for Chemists,” Angewandte Chemie, vol. 123, no. 8, pp. 1930–1935, Feb. 2011, doi: 10.1002/ange.201006464
-
[50]
Towards a soft pneumatic glove for hand rehabilitation,
P. Polygerinos et al., “Towards a soft pneumatic glove for hand rehabilitation,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, Nov. 2013, pp. 1512–1517. doi: 10.1109/IROS.2013.6696549
-
[51]
Pneumatic Networks for Soft Robotics that Actuate Rapidly,
B. Mosadegh et al., “Pneumatic Networks for Soft Robotics that Actuate Rapidly,” Adv. Funct. Mater., vol. 24, no. 15, pp. 2163–2170, Apr. 2014, doi: 10.1002/adfm.201303288
-
[52]
T. Wang, L. Ge, and G. Gu, “Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions,” Sens. Actuators A Phys., vol. 271, pp. 131–138, Mar. 2018, doi: 10.1016/j.sna.2018.01.018
-
[53]
Robotic Tentacles with Three‐Dimensional Mobility Based on Flexible Elastomers,
R. V. Martinez et al., “Robotic Tentacles with Three‐Dimensional Mobility Based on Flexible Elastomers,” Advanced Materials, vol. 25, no. 2, pp. 205–212, Jan. 2013, doi: 10.1002/adma.201203002
-
[54]
R. F. Shepherd et al., “Multigait soft robot,” Proceedings of the National Academy of Sciences, vol. 108, no. 51, pp. 20400–20403, Dec. 2011, doi: 10.1073/pnas.1116564108
-
[55]
S. Kokubu, P. E. T. Vinocour, and W. Yu, “Development and evaluation of fiber reinforced modular soft actuators and an individualized soft rehabilitation glove,” Rob. Auton. Syst., vol. 171, p. 104571, Jan. 2024, doi: 10.1016/j.robot.2023.104571
-
[56]
Modeling of Soft Fiber- Reinforced Bending Actuators,
P. Polygerinos et al., “Modeling of Soft Fiber- Reinforced Bending Actuators,” IEEE Transactions on Robotics, vol. 31, no. 3, pp. 778–789, Jun. 2015, doi: 10.1109/TRO.2015.2428504
-
[57]
Soft robotic glove for combined assistance and at-home rehabilitation,
P. Polygerinos, Z. Wang, K. C. Galloway, R. J. Wood, and C. J. Walsh, “Soft robotic glove for combined assistance and at-home rehabilitation,” Rob. Auton. Syst., vol. 73, pp. 135–143, Nov. 2015, doi: 10.1016/j.robot.2014.08.014
-
[58]
Mechanical Programming of Soft Actuators by Varying Fiber Angle,
F. Connolly, P. Polygerinos, C. J. Walsh, and K. Bertoldi, “Mechanical Programming of Soft Actuators by Varying Fiber Angle,” Soft Robot., vol. 2, no. 1, pp. 26–32, Mar. 2015, doi: 10.1089/soro.2015.0001
-
[59]
Design and Analysis of Fiber-Reinforced Soft Actuators for Wearable Hand Rehabilitation Device,
K. Ma, Z. Jiang, S. Gao, X. Cao, and F. Xu, “Design and Analysis of Fiber-Reinforced Soft Actuators for Wearable Hand Rehabilitation Device,” IEEE Robot. Autom. Lett., vol. 7, no. 3, pp. 6115–6122, Jul. 2022, doi: 10.1109/LRA.2022.3167063
-
[60]
H. Kai. Yap, Frederick. Sebastian, Christopher. Wiedeman, and C.-H. Yeow, “Design and characterization of low-cost fabric-based flat pneumatic actuators for soft assistive glove application,” in 2017 International Conference on Rehabilitation Robotics (ICORR), IEEE, Jul. 2017, pp. 1465–1470. doi: 10.1109/ICORR.2017.8009454
-
[61]
A bidirectional soft pneumatic fabric-based actuator for grasping applications,
J. H. Low et al., “A bidirectional soft pneumatic fabric-based actuator for grasping applications,” in 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Sep. 2017, pp. 1180–1186. doi: 10.1109/IROS.2017.8202290
-
[62]
Exploiting Textile Mechanical Anisotropy for Fabric-Based Pneumatic Actuators,
L. Cappello et al., “Exploiting Textile Mechanical Anisotropy for Fabric-Based Pneumatic Actuators,” Soft Robot., vol. 5, no. 5, pp. 662–674, Oct. 2018, doi: 10.1089/soro.2017.0076
-
[63]
Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices,
P. H. Nguyen and W. Zhang, “Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices,” Sci. Rep., vol. 10, no. 1, p. 9638, Jun. 2020, doi: 10.1038/s41598-020-65003-2
-
[64]
Assisting hand function after spinal cord injury with a fabric-based soft robotic glove,
L. Cappello et al., “Assisting hand function after spinal cord injury with a fabric-based soft robotic glove,” J. Neuroeng. Rehabil., vol. 15, no. 1, p. 59, Dec. 2018, doi: 10.1186/s12984-018-0391-x
-
[65]
Fabric soft pneumatic actuators with programmable turing pattern textures,
M. Tanaka, Y. Song, and T. Nomura, “Fabric soft pneumatic actuators with programmable turing pattern textures,” Sci. Rep., vol. 14, no. 1, p. 19175, Aug. 2024, doi: 10.1038/s41598-024-69450-z
-
[66]
L. Ge et al., “Design, Modeling, and Evaluation of Fabric-Based Pneumatic Actuators for Soft Wearable Assistive Gloves,” Soft Robot., vol. 7, no. 5, pp. 583–596, Oct. 2020, doi: 10.1089/soro.2019.0105
-
[67]
O. Ramos, M. Múnera, M. Moazen, H. Wurdemann, and C. A. Cifuentes, “Assessment of Soft Actuators for Hand Exoskeletons: Pleated Textile Actuators and Fiber-Reinforced Silicone Actuators,” Front. Bioeng. Biotechnol., vol. 10, Jul. 2022, doi: 10.3389/fbioe.2022.924888
-
[68]
C. Suulker, S. Skach, and K. Althoefer, “Soft Robotic Fabric Actuator With Elastic Bands for High Force and Bending Performance in Hand Exoskeletons,” IEEE Robot. Autom. Lett., vol. 7, no. 4, pp. 10621–10627, Oct. 2022, doi: 10.1109/LRA.2022.3194883
-
[69]
A fabric-based soft hand exoskeleton for assistance: the ExHand Exoskeleton,
J. C. Maldonado-Mejía et al., “A fabric-based soft hand exoskeleton for assistance: the ExHand Exoskeleton,” Front. Neurorobot., vol. 17, Jun. 2023, doi: 10.3389/fnbot.2023.1091827
-
[70]
Encoded sewing soft textile robots,
X. Guo et al., “Encoded sewing soft textile robots,” Sci. Adv., vol. 10, no. 1, Jan. 2024, doi: 10.1126/sciadv.adk3855
-
[71]
Soft Twisting Pneumatic Actuators Enabled by Freeform Surface Design,
F. Chen, Y. Miao, G. Gu, and X. Zhu, “Soft Twisting Pneumatic Actuators Enabled by Freeform Surface Design,” IEEE Robot. Autom. Lett., vol. 6, no. 3, pp. 5253–5260, Jul. 2021, doi: 10.1109/LRA.2021.3072813
-
[72]
Force and moment generation of fiber-reinforced pneumatic soft actuators,
J. Bishop-Moser, G. Krishnan, and S. Kota, “Force and moment generation of fiber-reinforced pneumatic soft actuators,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, Nov. 2013, pp. 4460–4465. doi: 10.1109/IROS.2013.6696997
-
[73]
A Closed-Form Kinematic Model for Fiber-Reinforced Elastomeric Enclosures,
W. Felt and C. David Remy, “A Closed-Form Kinematic Model for Fiber-Reinforced Elastomeric Enclosures,” J. Mech. Robot., vol. 10, no. 1, Feb. 2018, doi: 10.1115/1.4038220
-
[74]
W. Xiao, X. Du, W. Chen, G. Yang, D. Hu, and X. Han, “Cooperative collapse of helical structure enables the actuation of twisting pneumatic artificial muscle,” Int. J. Mech. Sci., vol. 201, p. 106483, Jul. 2021, doi: 10.1016/j.ijmecsci.2021.106483
-
[75]
Pneumatic Torsional Actuators for Inflatable Robots,
S. Sanan, P. S. Lynn, and S. T. Griffith, “Pneumatic Torsional Actuators for Inflatable Robots,” J. Mech. Robot., vol. 6, no. 3, Aug. 2014, doi: 10.1115/1.4026629
-
[76]
Soft and flexible robot skin actuator using multilayer 3D pneumatic network,
H. G. Shin, W. K. Chung, and K. Kim, “Soft and flexible robot skin actuator using multilayer 3D pneumatic network,” Nat. Commun., vol. 16, no. 1, p. 5575, Jul. 2025, doi: 10.1038/s41467-025-60496- 9
-
[77]
Flexible pneumatic twisting actuators and their application to tilting micromirrors,
B. Gorissen, T. Chishiro, S. Shimomura, D. Reynaerts, M. De Volder, and S. Konishi, “Flexible pneumatic twisting actuators and their application to tilting micromirrors,” Sens. Actuators A Phys., vol. 216, pp. 426–431, Sep. 2014, doi: 10.1016/j.sna.2014.01.015
-
[78]
Shape morphing of soft robotics by pneumatic torsion strip braiding,
C. Wu, H. Liu, S. Lin, J. Lam, N. Xi, and Y. Chen, “Shape morphing of soft robotics by pneumatic torsion strip braiding,” Nat. Commun., vol. 16, no. 1, p. 3787, Apr. 2025, doi: 10.1038/s41467-025-59051- 3
-
[79]
Origami-Inspired Soft Twisting Actuator,
D. Li et al., “Origami-Inspired Soft Twisting Actuator,” Soft Robot., vol. 10, no. 2, pp. 395–409, Apr. 2023, doi: 10.1089/soro.2021.0185
-
[80]
Torsional Pneumatic Actuator Based on Pre-Twisted Pneumatic Tubes for Soft Robotic Manipulators,
N. Oh, J.-G. Lee, and H. Rodrigue, “Torsional Pneumatic Actuator Based on Pre-Twisted Pneumatic Tubes for Soft Robotic Manipulators,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 6, pp. 3191–3201, Dec. 2023, doi: 10.1109/TMECH.2023.3262235
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.