SymTRELLIS: Symmetry-Enforced Voxel Latents for 3D Generation
Pith reviewed 2026-06-28 07:15 UTC · model grok-4.3
The pith
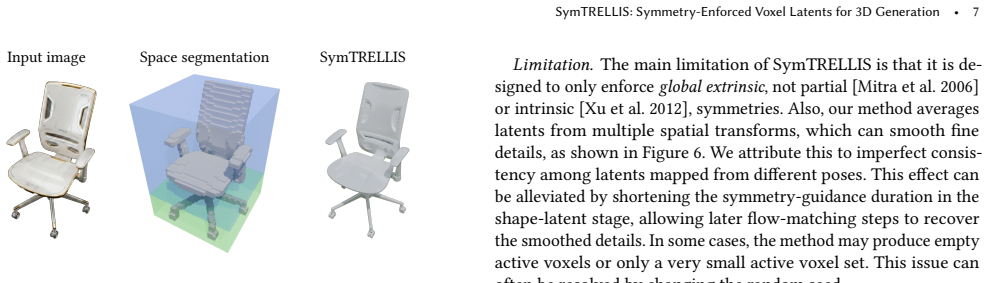
SymTRELLIS enforces arbitrary finite point group symmetries in flow-based 3D generation by averaging flow velocities across symmetry copies using a learned linear operator on voxel latents, without retraining the base model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
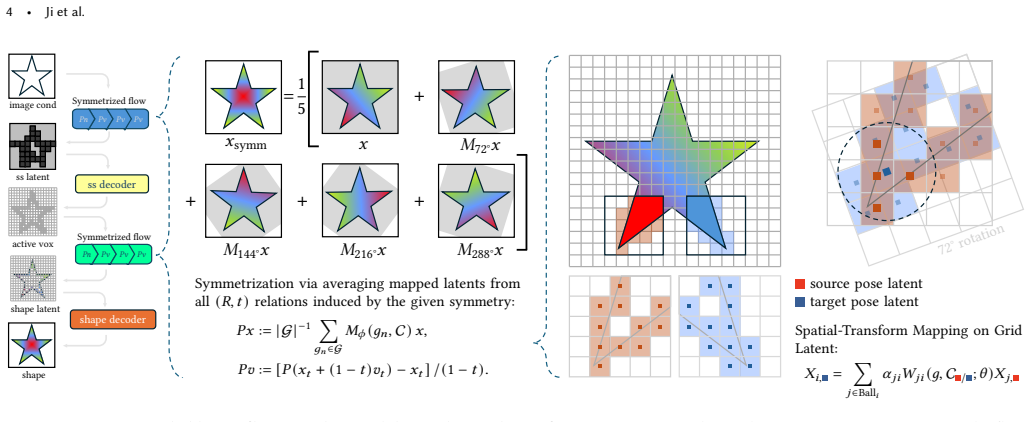
SymTRELLIS approximates the latent-space action of spatial transformations as a learned linear operator on voxel latents and enforces symmetry during generation by averaging the predicted flow velocities across all symmetry-equivalent transformations at each ODE step.
What carries the argument
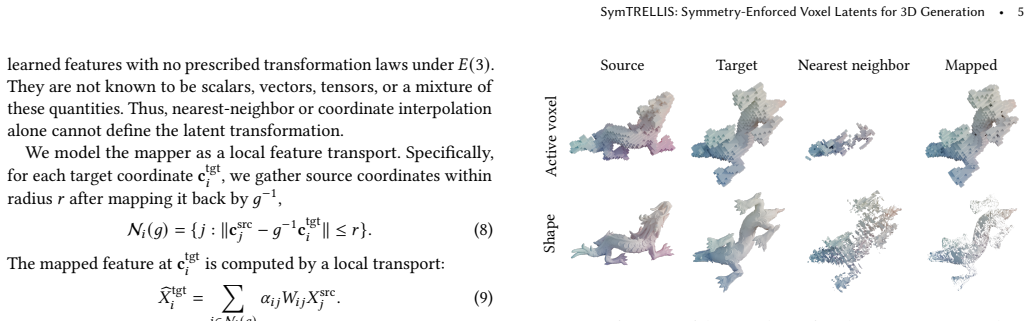
velocity symmetrization, implemented by a learned linear spatial-transform latent mapper that averages velocities over the orbit of a chosen finite point group.
If this is right
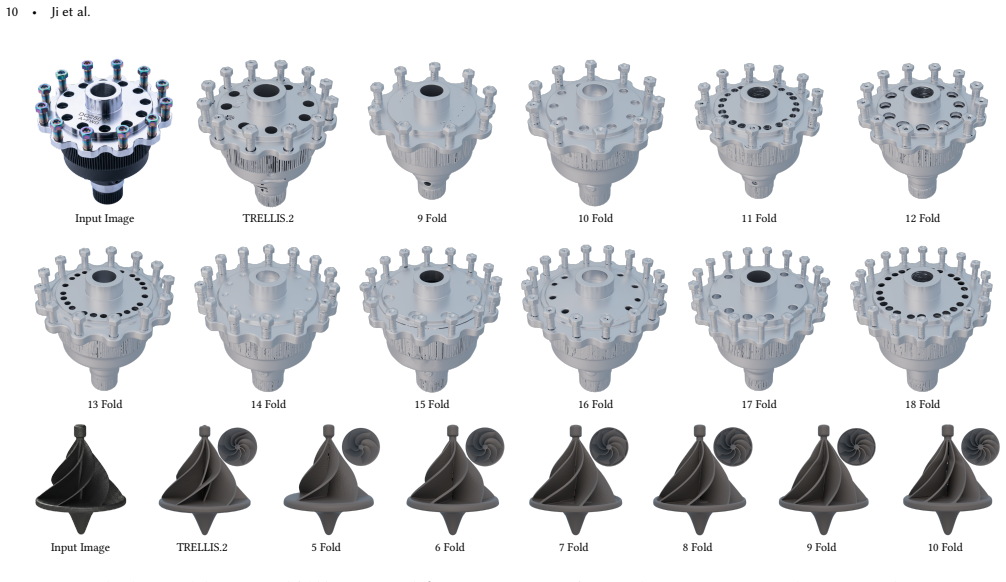
- The same mapper and averaging step work for any finite point group the user or detector supplies, including high-order rotations and polyhedral groups.
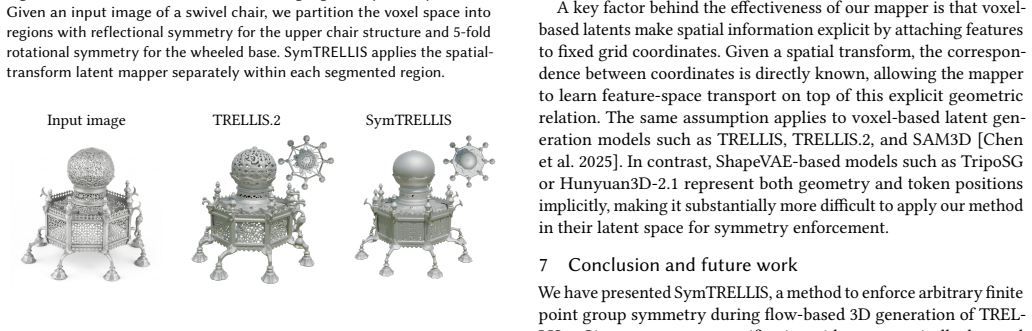
- Symmetry can be deliberately altered after an initial generation, allowing outputs that differ in fold count from the input view.
- No change to the underlying VAE or flow weights is required, so the method applies to any already-trained flow-based 3D generator that exposes voxel latents.
- Reconstruction accuracy on the benchmark remains comparable to the unmodified model while symmetry metrics improve over direct baselines.
Where Pith is reading between the lines
- Because the mapper is trained on generic non-symmetric data, the same weights might transfer to other latent 3D generators that share a similar voxel structure.
- Physical downstream tasks such as finite-element simulation or 3D printing could become more reliable once symmetry violations are removed at generation time.
- The linear-operator assumption may break for symmetries that involve large non-rigid deformations, suggesting a natural limit on the class of groups that can be enforced this way.
- Extending the velocity-averaging step to continuous or approximate symmetries would require replacing the finite orbit average with an integral or learned expectation.
Load-bearing premise
The learned linear operator must accurately approximate how the chosen spatial transformations act inside the latent space, so that averaging velocities produces exact symmetry without new artifacts or loss of sample quality.
What would settle it
Run the method on images of objects known to possess exact point-group symmetry and measure whether all symmetry-error metrics fall to machine precision while visual metrics remain within the base model's reported range; persistent nonzero error or quality drop would falsify the approximation claim.
Figures

read the original abstract
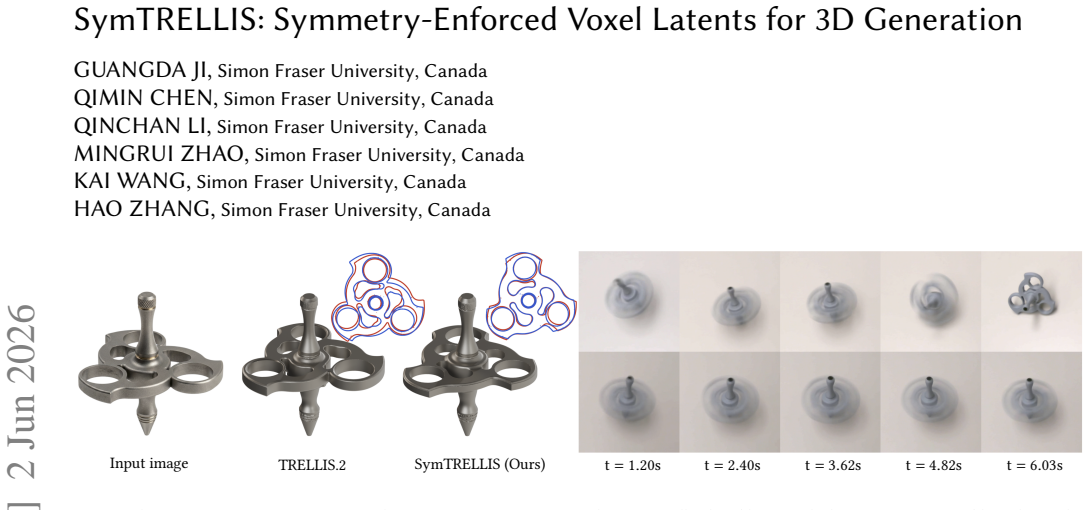
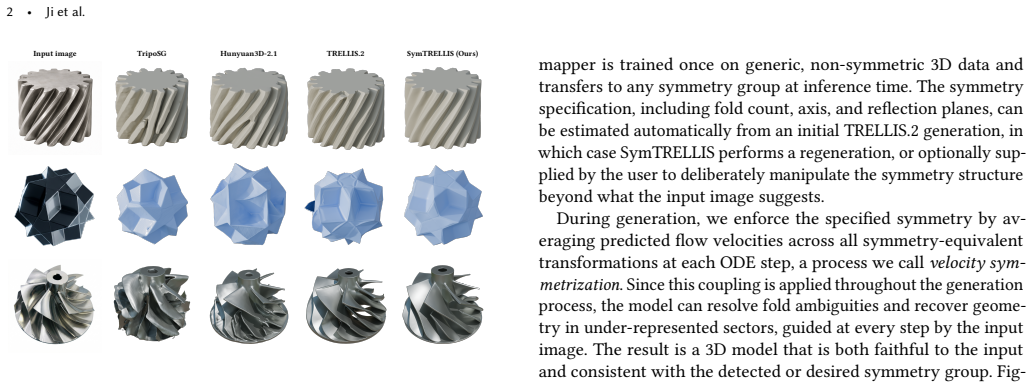
Single-view 3D generative models have achieved impressive visual quality, yet they are not designed to satisfy structural or functional requirements, and in practice, often fall short. Symmetry is one such requirement: violations, even subtle ones, on symmetry can render a model physically unusable. We present SymTRELLIS, a method that enforces arbitrary finite point group symmetries (rotational, reflectional, and polyhedral) during the flow-based 3D generation of TRELLIS.2, without retraining the underlying VAE or flow model. Our key idea is to approximate the latent-space action of spatial transformations as a learned linear operator on voxel latents, implemented as a lightweight spatial-transform latent mapper trained on generic, non-symmetric 3D data. At generation time, we enforce symmetry by averaging predicted flow velocities across all symmetry-equivalent transformations at each ODE step, a process we call velocity symmetrization. The symmetry specification can be estimated automatically from an initial TRELLIS.2 generation or supplied by the user, enabling deliberate fold manipulation beyond what the input image suggests. On a curated benchmark of 266 strictly symmetric objects spanning 2- to 20-fold rotations and polyhedral symmetry groups, SymTRELLIS substantially reduces all symmetry error metrics compared to TRELLIS.2, Hunyuan3D-2.1, and TripoSG, while maintaining reconstruction accuracy comparable to the base model.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces SymTRELLIS, which enforces arbitrary finite point-group symmetries (rotations, reflections, polyhedral) in the flow-based 3D generator TRELLIS.2 without retraining the VAE or flow model. It approximates the latent-space action of spatial transformations via a learned linear operator on voxel latents (trained on generic non-symmetric data) and performs velocity symmetrization by averaging predicted flow velocities across symmetry copies at each ODE step. Symmetry can be auto-estimated or user-specified. On a 266-object benchmark of strictly symmetric shapes, it reports substantially lower symmetry error metrics than TRELLIS.2, Hunyuan3D-2.1, and TripoSG while keeping reconstruction accuracy comparable.
Significance. If the linear mapper is a faithful approximation, the method offers a lightweight, training-free way to impose structural symmetry constraints on existing 3D generative models, addressing a practical limitation for applications requiring physical usability. The curated benchmark spanning 2- to 20-fold and polyhedral groups provides a concrete quantitative testbed that future work could build on.
major comments (3)
- [§3] §3 (method, latent mapper): No quantitative fidelity metric is supplied for the learned linear operator L (e.g., ||L(T(x)) − T(L(x))||, round-trip reconstruction error, or commutator norm on held-out data), leaving the central assumption—that velocity symmetrization enforces actual 3D symmetry—unverified and potentially load-bearing for all reported gains.
- [§4] §4 (experiments, 266-object benchmark): Symmetry-error reductions are stated without error bars, confidence intervals, or statistical tests; no ablation of mapper training (data, capacity, or loss) or of the velocity-averaging procedure itself is reported, so it is unclear whether observed improvements arise from accurate enforcement or from averaging artifacts.
- [§3.3] §3.3 (velocity symmetrization): The claim that averaging velocities across symmetry copies preserves sample quality rests on the untested premise that the linear map commutes sufficiently with the flow; without a controlled comparison (e.g., symmetrized vs. unsymmetrized trajectories on the same seeds), the “comparable reconstruction accuracy” result cannot be attributed to the method.
minor comments (2)
- [Abstract] Abstract and §4: The phrase “strictly symmetric objects” should be accompanied by an explicit verification procedure or reference to how ground-truth symmetry was confirmed for the 266 shapes.
- Notation: The symbol for the learned linear operator and its relation to the spatial transformation T should be introduced once with a clear equation rather than described only in prose.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major point below, agreeing where additional verification and rigor are needed, and commit to revisions that directly strengthen the manuscript.
read point-by-point responses
-
Referee: [§3] §3 (method, latent mapper): No quantitative fidelity metric is supplied for the learned linear operator L (e.g., ||L(T(x)) − T(L(x))||, round-trip reconstruction error, or commutator norm on held-out data), leaving the central assumption—that velocity symmetrization enforces actual 3D symmetry—unverified and potentially load-bearing for all reported gains.
Authors: We agree that quantitative metrics for the fidelity of L are necessary to substantiate the core assumption. In the revised manuscript we will add an evaluation subsection (and corresponding appendix) reporting the commutator norm ||L ∘ T − T ∘ L||, round-trip reconstruction error, and latent-space fidelity on held-out data drawn from both the generic training distribution and the symmetric benchmark. These results will be presented for multiple symmetry groups to confirm that the linear approximation is sufficiently accurate for the velocity-symmetrization step. revision: yes
-
Referee: [§4] §4 (experiments, 266-object benchmark): Symmetry-error reductions are stated without error bars, confidence intervals, or statistical tests; no ablation of mapper training (data, capacity, or loss) or of the velocity-averaging procedure itself is reported, so it is unclear whether observed improvements arise from accurate enforcement or from averaging artifacts.
Authors: We acknowledge that the current experimental presentation lacks statistical reporting and ablations. The revision will include per-metric standard deviations and confidence intervals computed over multiple random seeds, together with appropriate statistical tests. We will also add ablations that vary mapper training data, network capacity, and loss formulation, as well as an explicit ablation that isolates the velocity-averaging operator (comparing full SymTRELLIS against a version that applies the mapper but omits averaging). revision: yes
-
Referee: [§3.3] §3.3 (velocity symmetrization): The claim that averaging velocities across symmetry copies preserves sample quality rests on the untested premise that the linear map commutes sufficiently with the flow; without a controlled comparison (e.g., symmetrized vs. unsymmetrized trajectories on the same seeds), the “comparable reconstruction accuracy” result cannot be attributed to the method.
Authors: We agree that a controlled, seed-matched comparison is the most direct way to attribute preservation of reconstruction quality to the symmetrization procedure. The revised experiments will report side-by-side results for symmetrized and unsymmetrized trajectories that share identical initial noise and conditioning, measuring both symmetry-error metrics and reconstruction metrics (Chamfer distance, PSNR, and LPIPS) to demonstrate that quality remains comparable while symmetry error is reduced. revision: yes
Circularity Check
No circularity; derivation relies on independently trained mapper and empirical benchmark
full rationale
The paper trains the linear latent mapper on generic non-symmetric 3D data as a separate step, then applies velocity symmetrization at inference time using symmetry groups that can be user-specified or estimated from an initial generation. Symmetry error reductions are reported on a held-out curated benchmark of 266 objects, which is distinct from the mapper training data. No step reduces a claimed prediction to a fitted parameter by construction, invokes a self-citation as the sole justification for a uniqueness claim, or renames an input as an output. The central mechanism is an empirical approximation whose fidelity is asserted but not derived from the target result itself.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
SIGGRAPH Asia 2024 Conference Papers , year =
CLAY: A Controllable Large-scale Generative Model for Creating High-quality 3D Assets , author =. SIGGRAPH Asia 2024 Conference Papers , year =
2024
-
[2]
2025 , eprint =
TripoSG: High-Fidelity 3D Shape Synthesis using Large-Scale Rectified Flow Models , author =. 2025 , eprint =
2025
-
[3]
CVPR , year =
Structured 3D Latents for Scalable and Versatile 3D Generation , author =. CVPR , year =
-
[4]
and Guibas, Leonidas J
Mitra, Niloy J. and Guibas, Leonidas J. and Pauly, Mark , title =. 2007 , booktitle =
2007
-
[5]
Tech report , year =
Native and Compact Structured Latents for 3D Generation , author =. Tech report , year =
-
[6]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages =
Visual Anagrams: Generating Multi-View Optical Illusions with Diffusion Models , author =. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages =
-
[7]
Proceedings of the Computer Vision and Pattern Recognition Conference , pages =
LookingGlass: Generative Anamorphoses via Laplacian Pyramid Warping , author =. Proceedings of the Computer Vision and Pattern Recognition Conference , pages =
-
[8]
arXiv preprint arXiv:2302.10283 , year =
Self-supervised Learning of Split Invariant Equivariant Representations , author =. arXiv preprint arXiv:2302.10283 , year =
-
[9]
International Conference on Machine Learning , pages =
Homomorphism Autoencoder--Learning Group Structured Representations from Observed Transitions , author =. International Conference on Machine Learning , pages =. 2023 , organization =
2023
-
[10]
Computer Graphics Forum , volume =
Wang, Hui and Huang, Hui , title =. Computer Graphics Forum , volume =
-
[11]
and Guibas, Leonidas J
Mitra, Niloy J. and Guibas, Leonidas J. and Pauly, Mark , title =. ACM Trans. Graph. , pages =. 2006 , volume =
2006
-
[12]
and Wallner, Johannes and Pottmann, Helmut and Guibas, Leonidas J
Pauly, Mark and Mitra, Niloy J. and Wallner, Johannes and Pottmann, Helmut and Guibas, Leonidas J. , title =. ACM Trans. Graph. , pages =. 2008 , volume =
2008
-
[13]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages =
Objaverse: A Universe of Annotated 3D Objects , author =. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages =
-
[14]
Advances in Neural Information Processing Systems , volume =
Objaverse-XL: A Universe of 10M+ 3D Objects , author =. Advances in Neural Information Processing Systems , volume =
-
[15]
2025 , eprint =
Hunyuan3D 2.1: From Images to High-Fidelity 3D Assets with Production-Ready PBR Material , author =. 2025 , eprint =
2025
-
[16]
2025 , eprint =
Hunyuan3D 2.0: Scaling Diffusion Models for High Resolution Textured 3D Assets Generation , author =. 2025 , eprint =
2025
-
[17]
2024 , eprint =
Hunyuan3D 1.0: A Unified Framework for Text-to-3D and Image-to-3D Generation , author =. 2024 , eprint =
2024
-
[18]
2025 , booktitle =
Yan, Hongyu and Li, Zijun and Luo, Kunming and Lu, Li and Tan, Ping , title =. 2025 , booktitle =
2025
-
[19]
Computer Graphics Forum , volume =
Real-Time Symmetry-Preserving Deformation , author =. Computer Graphics Forum , volume =. 2014 , organization =
2014
-
[20]
Proceedings of the Computer Vision and Pattern Recognition Conference , pages =
Symmetry Strikes Back: From Single-Image Symmetry Detection to 3D Generation , author =. Proceedings of the Computer Vision and Pattern Recognition Conference , pages =
-
[21]
arXiv preprint arXiv:2601.20425 , year =
Quartet of Diffusions: Structure-Aware Point Cloud Generation through Part and Symmetry Guidance , author =. arXiv preprint arXiv:2601.20425 , year =
-
[22]
SAM 3D: 3Dfy Anything in Images
SAM 3D: 3DFY Anything in Images , author =. arXiv preprint arXiv:2511.16624 , year =
work page internal anchor Pith review Pith/arXiv arXiv
-
[23]
Flow Matching for Generative Modeling
Flow Matching for Generative Modeling , author =. arXiv preprint arXiv:2210.02747 , year =
work page internal anchor Pith review Pith/arXiv arXiv
-
[24]
Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow
Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow , author =. arXiv preprint arXiv:2209.03003 , year =
work page internal anchor Pith review Pith/arXiv arXiv
-
[25]
KDD , volume =
A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise , author =. KDD , volume =
-
[26]
ACM Transactions on Graphics, (Proc
Multi-Scale Partial Intrinsic Symmetry Detection , author =. ACM Transactions on Graphics, (Proc. of SIGGRAPH Asia 2012) , volume =
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.