Diffusion Forcing Planner: History-Annealed Planning with Time-Dependent Guidance for Autonomous Driving
Pith reviewed 2026-06-27 13:12 UTC · model grok-4.3
The pith
DFP decomposes trajectories into independently noised segments and uses annealed history guidance to generate stable driving plans.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
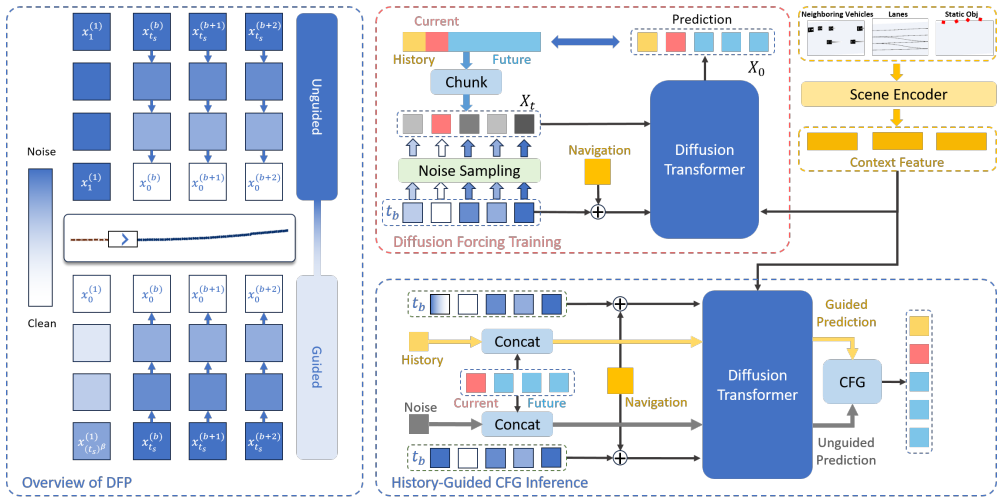
By decomposing the trajectory into history, current and future segments with independent noise levels and jointly denoising them under a heterogeneous diffusion process, while applying classifier-free guidance with annealed history, DFP produces continuous, stable, and controllable motion plans that adapt to context rather than copy history.
What carries the argument
Heterogeneous joint diffusion on trajectory segments with time-dependent noise and annealed classifier-free guidance.
If this is right
- Closed-loop performance on nuPlan matches or exceeds prior methods.
- Trajectories remain continuous and stable without accumulating perturbations.
- Plans adapt to environment changes instead of repeating historical patterns.
- Controllability is achieved through the guidance mechanism.
Where Pith is reading between the lines
- Similar segment-wise noise scheduling could apply to other long-horizon sequence generation tasks like video or speech.
- Testing on real-world driving data beyond nuPlan would check if the boundary stability holds in varied conditions.
- The approach might reduce the need for post-processing smoothing in planning pipelines.
Load-bearing premise
Decomposing the trajectory into independently noised segments and jointly denoising them will force adaptation to new contexts without creating instabilities at the segment boundaries.
What would settle it
Closed-loop simulations on nuPlan where DFP shows either accumulating jitter across frames or repeated copying of past trajectories at rates similar to baselines.
Figures
read the original abstract
Learning-based motion planners, despite recent progress, often suffer from temporal inconsistency. Small perturbations across frames can accumulate into unstable trajectories, degrading comfort and safety in closed-loop driving. Several methods attempt to inject history as a static conditioning signal to stabilize outputs, only to induce the planner to copy historical patterns instead of adapting to environment contexts. To address this limitation, we propose Diffusion Forcing Planner (DFP), a diffusion-based planning framework driven by history-guided control. Specifically, DFP decomposes the full trajectory into history, current and future segments, and assign independent noise levels to each segment. The model jointly denoises the historical and the future segments, enforcing a heterogeneous joint diffusion process. At inference, classifier-free guidance (CFG) is applied to steer future sampling using annealed history in a controllable manner. Closed-loop evaluation and comprehensive ablations on nuPlan show that DFP achieves competitive performance while producing continuous, stable, and controllable motion plans in complex driving scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Diffusion Forcing Planner (DFP), a diffusion-based motion planning method for autonomous driving. It decomposes trajectories into history/current/future segments assigned independent noise levels, performs joint denoising under a heterogeneous diffusion process, and applies classifier-free guidance with annealed history at inference to produce continuous, stable, and context-adaptive plans. Closed-loop nuPlan evaluations and ablations are reported to show competitive performance without historical pattern copying.
Significance. If the central stability and adaptability claims hold under rigorous verification, the approach would offer a concrete mechanism for injecting history without inducing copying in diffusion planners, which is a recurring failure mode in learning-based autonomous driving. The use of per-segment noise schedules and annealed CFG is a potentially reusable idea for other sequential generation tasks.
major comments (2)
- [Abstract] Abstract: No quantitative metrics, baseline names, or error bars are supplied for the claimed 'competitive performance' on nuPlan closed-loop evaluation. Without these, the central empirical claim cannot be assessed for soundness or compared to prior work.
- [Abstract] Abstract: The heterogeneous joint diffusion process (independent noise on history/current/future segments, jointly denoised) is described at a high level only. No equations, noise schedule definitions, boundary conditioning details, or continuity regularizer are given, leaving open whether the process actually prevents pattern copying or introduces junction artifacts as hypothesized in the stress-test note.
Simulated Author's Rebuttal
We thank the referee for the detailed feedback. We agree that the abstract can be strengthened with additional concrete details and will revise it in the next version. Below we respond point-by-point to the major comments.
read point-by-point responses
-
Referee: [Abstract] Abstract: No quantitative metrics, baseline names, or error bars are supplied for the claimed 'competitive performance' on nuPlan closed-loop evaluation. Without these, the central empirical claim cannot be assessed for soundness or compared to prior work.
Authors: We agree the abstract would benefit from explicit metrics. The manuscript body (Table 1, Figure 4, and associated text) reports closed-loop nuPlan results with specific baselines (e.g., PlanTF, GC-PGP), success/collision rates, and error bars across multiple seeds. In the revision we will incorporate the most salient quantitative results and baseline names into the abstract while respecting length limits. revision: yes
-
Referee: [Abstract] Abstract: The heterogeneous joint diffusion process (independent noise on history/current/future segments, jointly denoised) is described at a high level only. No equations, noise schedule definitions, boundary conditioning details, or continuity regularizer are given, leaving open whether the process actually prevents pattern copying or introduces junction artifacts as hypothesized in the stress-test note.
Authors: The abstract is intentionally concise. Section 3 of the manuscript supplies the full formulation: independent noise schedules per segment (Eq. 3), the joint denoising objective, boundary conditioning at segment junctions, and the continuity regularizer. The stress-test note and ablations (Section 4.3) demonstrate that the heterogeneous schedule plus annealed CFG reduces historical copying relative to standard conditioning without introducing measurable junction artifacts. We will add a single sentence referencing the key equations to the revised abstract. revision: partial
Circularity Check
No circularity; claims rest on external nuPlan evaluation
full rationale
The paper introduces DFP by decomposing trajectories into segments with independent noise levels and applying joint denoising plus annealed CFG. No equations, fitted parameters, or self-citations are shown that reduce the stability/adaptability claims to inputs by construction. Performance is asserted via closed-loop nuPlan metrics, which are external and falsifiable, rendering the derivation self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Tenenbaum, Tommi S
Anurag Ajay, Yilun Du, Abhi Gupta, Joshua B. Tenenbaum, Tommi S. Jaakkola, and Pulkit Agrawal. Is conditional gen- erative modeling all you need for decision making? InThe Eleventh International Conference on Learning Representa- tions, 2023. 2
2023
-
[2]
ChauffeurNet: Learning to Drive by Imitating the Best and Synthesizing the Worst
Mayank Bansal, Alex Krizhevsky, and Abhijit Ogale. Chauf- feurnet: Learning to drive by imitating the best and synthe- sizing the worst.arXiv preprint arXiv:1812.03079, 2018. 2
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[3]
Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, et al.π 0: A vision-language- action flow model for general robot control.arXiv preprint arXiv:2410.24164, 2024. 1, 9
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[4]
In9th Annual Conference on Robot Learning, 2025
Kevin Black, Noah Brown, James Darpinian, Karan Dha- balia, Danny Driess, Adnan Esmail, Michael Robert Equi, Chelsea Finn, Niccolo Fusai, Manuel Y Galliker, et al.π0: A vision-language-action model with open-world generaliza- tion. In9th Annual Conference on Robot Learning, 2025. 1
2025
-
[5]
Real-Time Execution of Action Chunking Flow Policies
Kevin Black, Manuel Y Galliker, and Sergey Levine. Real- time execution of action chunking flow policies.arXiv preprint arXiv:2506.07339, 2025. 1, 2
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[6]
NuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles
Holger Caesar, Juraj Kabzan, Kok Seang Tan, Whye Kit Fong, Eric Wolff, Alex Lang, Luke Fletcher, Oscar Beijbom, and Sammy Omari. nuplan: A closed-loop ml-based plan- ning benchmark for autonomous vehicles.arXiv preprint arXiv:2106.11810, 2021. 2
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[7]
Nuplan: A closed-loop ml-based plan- ning benchmark for autonomous vehicles
Holger Caesar, Juraj Kabzan, Kok Seang Tan, Whye Kit Fong, Eric Wolff, Alex Lang, Luke Fletcher, Oscar Beijbom, and Sammy Omari. Nuplan: A closed-loop ml-based plan- ning benchmark for autonomous vehicles. InCVPR ADP3 workshop, 2021. 10
2021
-
[8]
End-to-end autonomous driving: Challenges and frontiers.IEEE Transactions on Pat- tern Analysis and Machine Intelligence, 2024
Li Chen, Penghao Wu, Kashyap Chitta, Bernhard Jaeger, An- dreas Geiger, and Hongyang Li. End-to-end autonomous driving: Challenges and frontiers.IEEE Transactions on Pat- tern Analysis and Machine Intelligence, 2024. 2
2024
-
[9]
VADv2: End-to-End Vectorized Autonomous Driving via Probabilistic Planning
Shaoyu Chen, Bo Jiang, Hao Gao, Bencheng Liao, Qing Xu, Qian Zhang, Chang Huang, Wenyu Liu, and Xinggang Wang. Vadv2: End-to-end vectorized autonomous driving via probabilistic planning.arXiv preprint arXiv:2402.13243,
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
Driving- gpt: Unifying driving world modeling and planning with multi-modal autoregressive transformers
Yuntao Chen, Yuqi Wang, and Zhaoxiang Zhang. Driving- gpt: Unifying driving world modeling and planning with multi-modal autoregressive transformers. InProceedings of the IEEE/CVF International Conference on Computer Vi- sion, pages 26890–26900, 2025. 1
2025
-
[11]
Jie Cheng, Yingbing Chen, and Qifeng Chen. Pluto: Push- ing the limit of imitation learning-based planning for au- tonomous driving.arXiv preprint arXiv:2404.14327, 2024. 2, 5
-
[12]
Rethinking imitation-based planners for autonomous driving
Jie Cheng, Yingbing Chen, Xiaodong Mei, Bowen Yang, Bo Li, and Ming Liu. Rethinking imitation-based planners for autonomous driving. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 14123–14130. IEEE, 2024. 1, 2, 5
2024
-
[13]
Diffusion policy: Visuomotor policy learning via action dif- fusion.The International Journal of Robotics Research, 44 (10-11):1684–1704, 2025
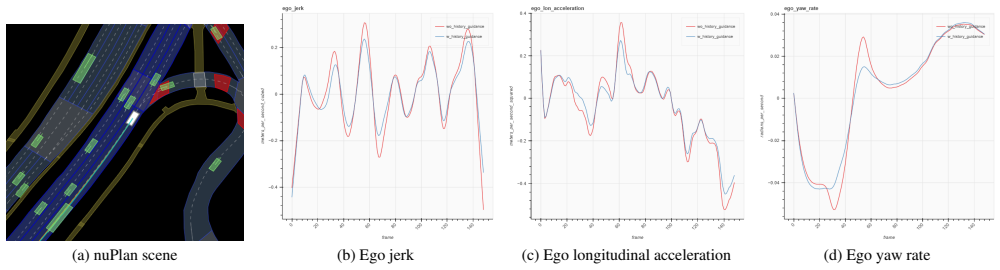
Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Russ Tedrake, and Shuran Song. Diffusion policy: Visuomotor policy learning via action dif- fusion.The International Journal of Robotics Research, 44 (10-11):1684–1704, 2025. 1, 2 (a) nuPlan scene (b) Ego jerk (c) Ego longitudinal acceleration (d) Ego yaw rate Figure 5. nuPl...
2025
-
[14]
Transfuser: Imitation with transformer-based sensor fusion for autonomous driv- ing.IEEE transactions on pattern analysis and machine in- telligence, 45(11):12878–12895, 2022
Kashyap Chitta, Aditya Prakash, Bernhard Jaeger, Zehao Yu, Katrin Renz, and Andreas Geiger. Transfuser: Imitation with transformer-based sensor fusion for autonomous driv- ing.IEEE transactions on pattern analysis and machine in- telligence, 45(11):12878–12895, 2022. 2
2022
-
[15]
Parting with misconceptions about learning- based vehicle motion planning
Daniel Dauner, Marcel Hallgarten, Andreas Geiger, and Kashyap Chitta. Parting with misconceptions about learning- based vehicle motion planning. InConference on Robot Learning, pages 1268–1281. PMLR, 2023. 5
2023
-
[16]
Causal confusion in imitation learning.Advances in neural informa- tion processing systems, 32, 2019
Pim De Haan, Dinesh Jayaraman, and Sergey Levine. Causal confusion in imitation learning.Advances in neural informa- tion processing systems, 32, 2019. 1, 2
2019
-
[17]
Classifier-Free Diffusion Guidance
Jonathan Ho and Tim Salimans. Classifier-free diffusion guidance.arXiv preprint arXiv:2207.12598, 2022. 2
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[18]
Denoising dif- fusion probabilistic models.Advances in neural information processing systems, 33:6840–6851, 2020
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising dif- fusion probabilistic models.Advances in neural information processing systems, 33:6840–6851, 2020. 1, 2
2020
-
[19]
Gameformer: Game-theoretic modeling and learning of transformer-based interactive prediction and planning for autonomous driving
Zhiyu Huang, Haochen Liu, and Chen Lv. Gameformer: Game-theoretic modeling and learning of transformer-based interactive prediction and planning for autonomous driving. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 3903–3913, 2023. 2, 5
2023
-
[20]
EMMA: End-to-End Multimodal Model for Autonomous Driving
Jyh-Jing Hwang, Runsheng Xu, Hubert Lin, Wei-Chih Hung, Jingwei Ji, Kristy Choi, Di Huang, Tong He, Paul Covington, Benjamin Sapp, et al. Emma: End-to-end multimodal model for autonomous driving.arXiv preprint arXiv:2410.23262,
work page internal anchor Pith review Pith/arXiv arXiv
-
[21]
Tenenbaum, and Sergey Levine
Michael Janner, Yilun Du, Joshua B. Tenenbaum, and Sergey Levine. Planning with diffusion for flexible behavior synthe- sis. InInternational Conference on Machine Learning, 2022. 2
2022
-
[22]
Vad: Vectorized scene representa- tion for efficient autonomous driving
Bo Jiang, Shaoyu Chen, Qing Xu, Bencheng Liao, Jiajie Chen, Helong Zhou, Qian Zhang, Wenyu Liu, Chang Huang, and Xinggang Wang. Vad: Vectorized scene representa- tion for efficient autonomous driving. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 8340–8350, 2023. 2
2023
-
[23]
Stream- ing flow policy: Simplifying diffusion/flow-matching poli- cies by treating action trajectories as flow trajectories
Sunshine Jiang, Xiaolin Fang, Nicholas Roy, Tom´as Lozano- P´erez, Leslie Pack Kaelbling, and Siddharth Ancha. Stream- ing flow policy: Simplifying diffusion/flow-matching poli- cies by treating action trajectories as flow trajectories. In9th Annual Conference on Robot Learning, CoRL 2025, Seoul, Korea, 2025. 2, 3
2025
-
[24]
Learning to drive in a day
Alex Kendall, Jeffrey Hawke, David Janz, Przemyslaw Mazur, Daniele Reda, John-Mark Allen, Vinh-Dieu Lam, Alex Bewley, and Amar Shah. Learning to drive in a day. In2019 international conference on robotics and automation (ICRA), pages 8248–8254. IEEE, 2019. 2
2019
-
[25]
Traffic flow dynamics: data, models and simulation.No
Arne Kesting and Martin Treiber. Traffic flow dynamics: data, models and simulation.No. Book, Whole)(Springer Berlin Heidelberg, Berlin, Heidelberg, 2013. 5
2013
-
[26]
Hydra-MDP: End-to-end Multimodal Planning with Multi-target Hydra-Distillation
Zhenxin Li, Kailin Li, Shihao Wang, Shiyi Lan, Zhiding Yu, Yishen Ji, Zhiqi Li, Ziyue Zhu, Jan Kautz, Zuxuan Wu, et al. Hydra-mdp: End-to-end multimodal planning with multi- target hydra-distillation.arXiv preprint arXiv:2406.06978,
work page internal anchor Pith review Pith/arXiv arXiv
-
[27]
Zhiqi Li, Zhiding Yu, Shiyi Lan, Jiahan Li, Jan Kautz, Tong Lu, and Jose M Alvarez. Is ego status all you need for open- loop end-to-end autonomous driving? InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 14864–14873, 2024. 1, 2
2024
-
[28]
Mixture-of- transformers: A sparse and scalable architecture for multi- modal foundation models.Transactions on Machine Learn- ing Research, 2025
Weixin Liang, LILI YU, Liang Luo, Srini Iyer, Ning Dong, Chunting Zhou, Gargi Ghosh, Mike Lewis, Wen tau Yih, Luke Zettlemoyer, and Xi Victoria Lin. Mixture-of- transformers: A sparse and scalable architecture for multi- modal foundation models.Transactions on Machine Learn- ing Research, 2025. 9
2025
-
[29]
Bencheng Liao, Shaoyu Chen, Haoran Yin, Bo Jiang, Cheng Wang, Sixu Yan, Xinbang Zhang, Xiangyu Li, Ying Zhang, Qian Zhang, and Xinggang Wang. Diffusiondrive: Truncated diffusion model for end-to-end autonomous driving.arXiv preprint arXiv:2411.15139, 2024. 1, 2
-
[30]
Bidirectional decoding: Improv- ing action chunking via guided test-time sampling
Yuejiang Liu, Jubayer Ibn Hamid, Annie Xie, Yoonho Lee, Max Du, and Chelsea Finn. Bidirectional decoding: Improv- ing action chunking via guided test-time sampling. InThe Thirteenth International Conference on Learning Represen- tations, 2025. 2, 3
2025
-
[31]
Dpm-solver: A fast ode solver for diffu- sion probabilistic model sampling in around 10 steps.Ad- vances in neural information processing systems, 35:5775– 5787, 2022
Cheng Lu, Yuhao Zhou, Fan Bao, Jianfei Chen, Chongxuan Li, and Jun Zhu. Dpm-solver: A fast ode solver for diffu- sion probabilistic model sampling in around 10 steps.Ad- vances in neural information processing systems, 35:5775– 5787, 2022. 6
2022
-
[32]
What Matters in Learning from Offline Human Demonstrations for Robot Manipulation
Ajay Mandlekar, Danfei Xu, Josiah Wong, Soroush Nasiri- any, Chen Wang, Rohun Kulkarni, Li Fei-Fei, Silvio Savarese, Yuke Zhu, and Roberto Mart´ın-Mart´ın. What mat- ters in learning from offline human demonstrations for robot manipulation.arXiv preprint arXiv:2108.03298, 2021. 1
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[33]
Urban driver: Learning to drive from real-world demonstrations using policy gradients
Oliver Scheel, Luca Bergamini, Maciej Wolczyk, Bła ˙zej Osi´nski, and Peter Ondruska. Urban driver: Learning to drive from real-world demonstrations using policy gradients. InConference on Robot Learning, pages 718–728. PMLR,
-
[34]
History-Guided Video Diffusion
Kiwhan Song, Boyuan Chen, Max Simchowitz, Yilun Du, Russ Tedrake, and Vincent Sitzmann. History-guided video diffusion.arXiv preprint arXiv:2502.06764, 2025. 1, 2
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[35]
Score-Based Generative Modeling through Stochastic Differential Equations
Yang Song, Jascha Sohl-Dickstein, Diederik P Kingma, Ab- hishek Kumar, Stefano Ermon, and Ben Poole. Score-based generative modeling through stochastic differential equa- tions.arXiv preprint arXiv:2011.13456, 2020. 2
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[36]
Generalizing motion planners with mixture of experts for autonomous driving
Qiao Sun, Huimin Wang, Jiahao Zhan, Fan Nie, Xin Wen, Leimeng Xu, Kun Zhan, Peng Jia, Xianpeng Lang, and Hang Zhao. Generalizing motion planners with mixture of experts for autonomous driving. In2025 IEEE International Confer- ence on Robotics and Automation (ICRA), pages 6033–6039. IEEE, 2025. 2
2025
-
[37]
Flow matching-based autonomous driving planning with advanced interactive behavior modeling
Tianyi Tan, Yinan Zheng, Ruiming Liang, Zexu Wang, Kexin Zheng, Jinliang Zheng, Jianxiong Li, Xianyuan Zhan, and Jingjing Liu. Flow matching-based autonomous driving planning with advanced interactive behavior modeling. In The Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025. 2, 9, 10
2025
-
[38]
Learning long-context diffusion policies via past-token pre- diction, 2025
Marcel Torne, Andy Tang, Yuejiang Liu, and Chelsea Finn. Learning long-context diffusion policies via past-token pre- diction, 2025. 1, 2
2025
-
[39]
Junjie Wen, Minjie Zhu, Yichen Zhu, Zhibin Tang, Jinming Li, Zhongyi Zhou, Chengmeng Li, Xiaoyu Liu, Yaxin Peng, Chaomin Shen, et al. Diffusion-vla: Generalizable and inter- pretable robot foundation model via self-generated reason- ing.arXiv preprint arXiv:2412.03293, 2024. 1
-
[40]
Goalflow: Goal- driven flow matching for multimodal trajectories generation in end-to-end autonomous driving
Zebin Xing, Xingyu Zhang, Yang Hu, Bo Jiang, Tong He, Qian Zhang, Xiaoxiao Long, and Wei Yin. Goalflow: Goal- driven flow matching for multimodal trajectories generation in end-to-end autonomous driving. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 1602–1611, 2025. 2
2025
-
[41]
Rui Zhao, Yuze Fan, Ziguo Chen, Fei Gao, and Zhenhai Gao. Diffe2e: Rethinking end-to-end driving with a hy- brid action diffusion and supervised policy.arXiv preprint arXiv:2505.19516, 2025. 1
-
[42]
Diffusion-based planning for autonomous driving with flexi- ble guidance
Yinan Zheng, Ruiming Liang, Kexin ZHENG, Jinliang Zheng, Liyuan Mao, Jianxiong Li, Weihao Gu, Rui Ai, Shengbo Eben Li, Xianyuan Zhan, and Jingjing Liu. Diffusion-based planning for autonomous driving with flexi- ble guidance. InThe Thirteenth International Conference on Learning Representations, 2025. 2, 5, 10
2025
-
[43]
Ruiguo Zhong, Ruoyu Yao, Pei Liu, Xiaolong Chen, Rui Yang, and Jun Ma. Coplanner: An interactive motion plan- ner with contingency-aware diffusion for autonomous driv- ing.arXiv preprint arXiv:2509.17080, 2025. 5
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.