Direct 3D-Aware Object Insertion via Decomposed Visual Proxies
Pith reviewed 2026-06-28 02:12 UTC · model grok-4.3
The pith
Decomposing insertion conditions into separate appearance, geometry, and context pathways enables controllable 3D object insertion without feature entanglement.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
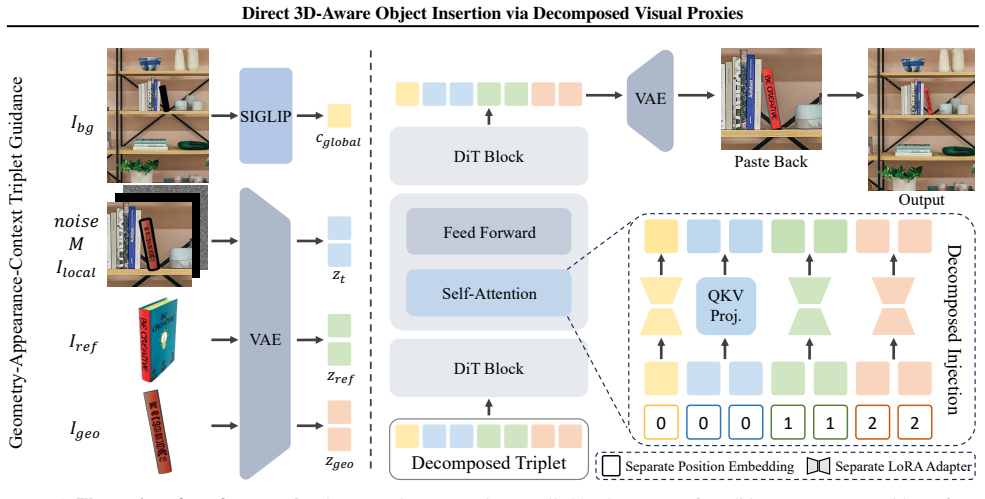
DIRECT decomposes the insertion conditions into appearance guidance capturing visual details from the reference object, geometry guidance derived from the user-adjusted 3D proxy, and context guidance from the target background; by injecting them through separate pathways, the method avoids feature entanglement and simultaneously preserves reference appearance, follows the user-specified pose, and adapts the object to the target scene.
What carries the argument
Decomposed injection of appearance guidance, geometry guidance from the 3D proxy, and context guidance through separate pathways inside the diffusion model.
If this is right
- Interactive pose manipulation becomes possible alongside high-fidelity 2D synthesis.
- The inserted object preserves reference appearance while following the specified pose and adapting to the scene.
- Geometric controllability and visual quality both improve over prior 2D inpainting approaches.
- An automated data construction pipeline increases training diversity and quality.
Where Pith is reading between the lines
- The same separation idea might apply to other conditional image tasks that need independent control of identity, layout, and environment.
- If the 3D proxy is replaced by a text-described pose, the method could extend to language-driven insertion.
- Failure modes on real photographs with complex lighting would indicate where the proxy-to-image transfer still needs refinement.
Load-bearing premise
Sending the three different signals down separate pathways is enough to stop them from mixing and to let each factor be controlled on its own.
What would settle it
A test case in which the output either changes the reference object's visual details, deviates from the supplied 3D pose, or fails to match background lighting and shadows would show the separate pathways do not deliver the claimed independent control.
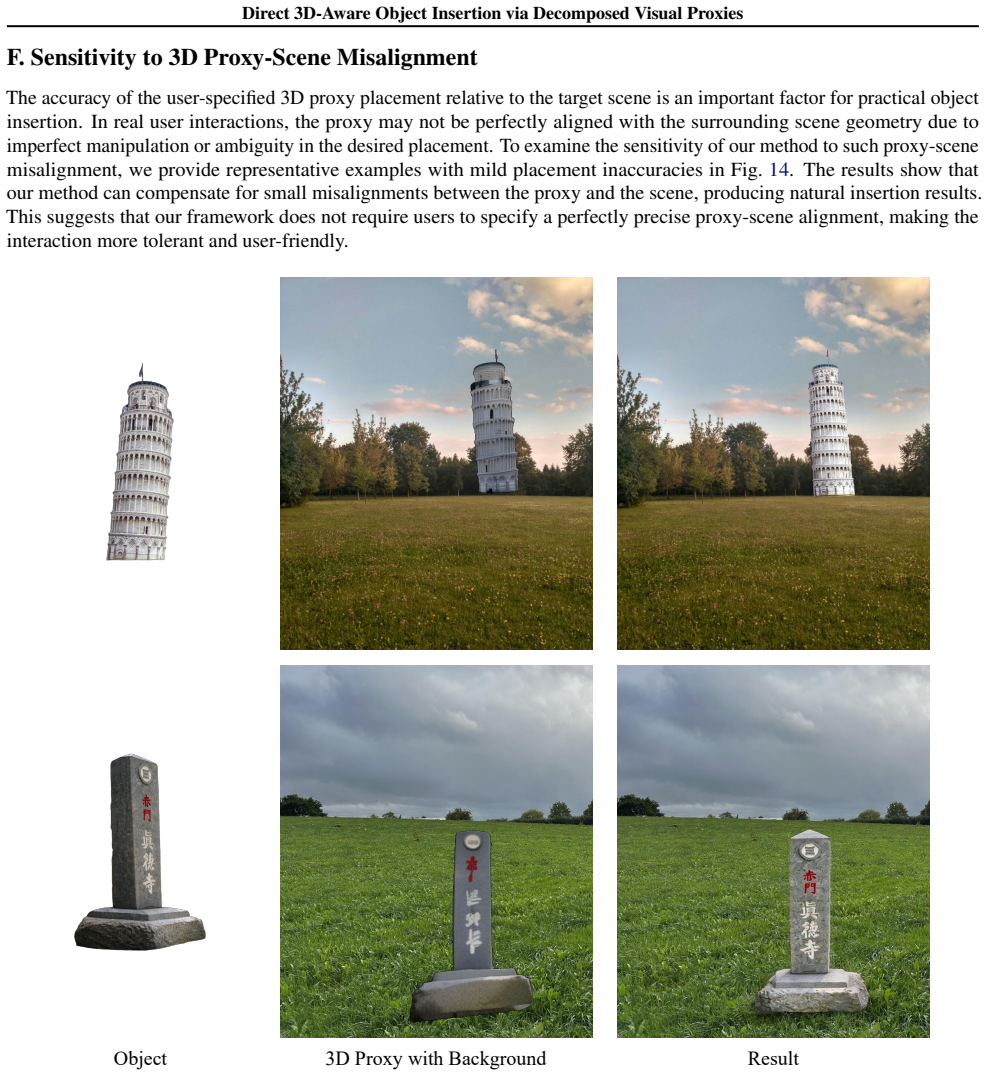
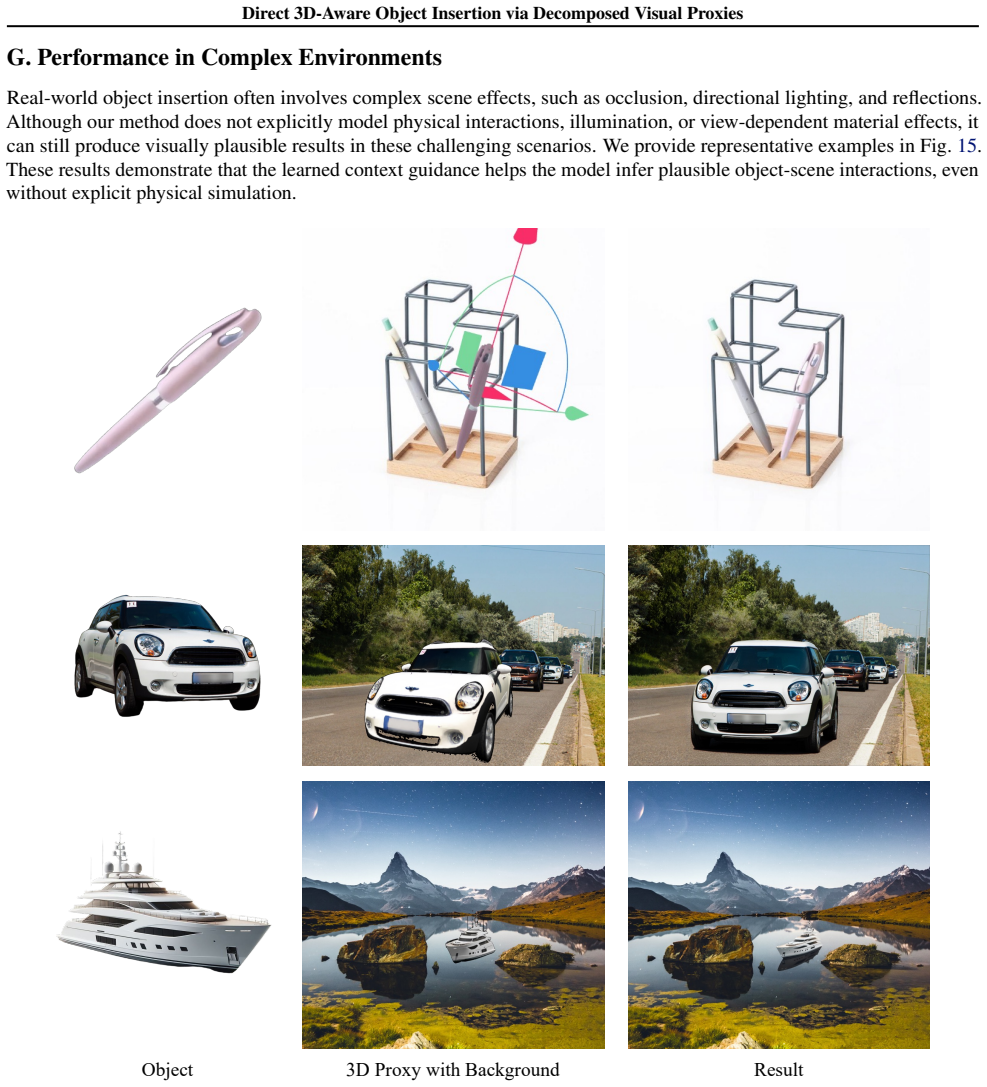
Figures


read the original abstract
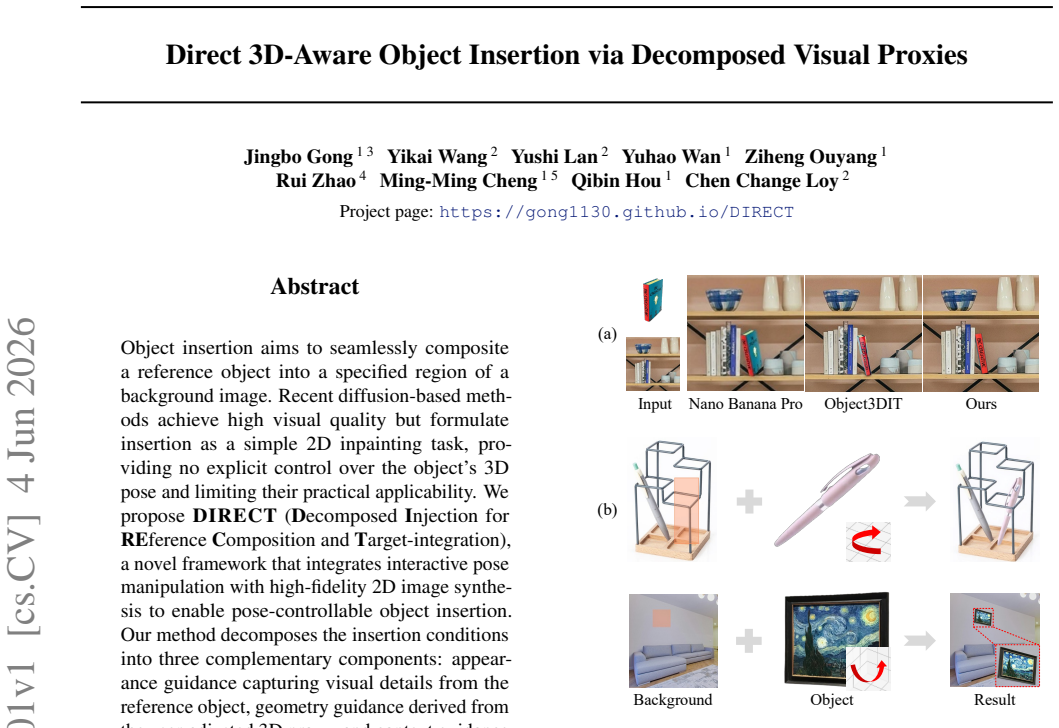
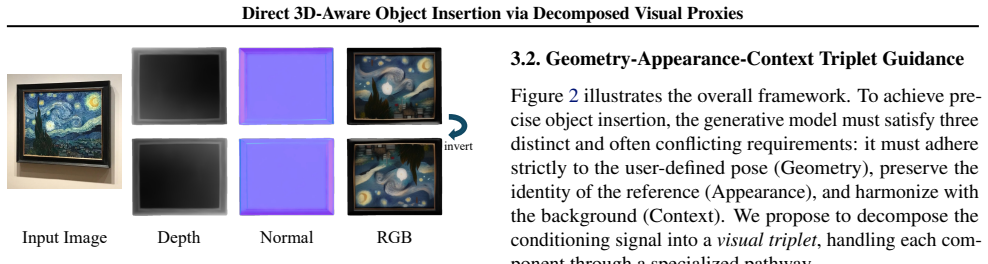
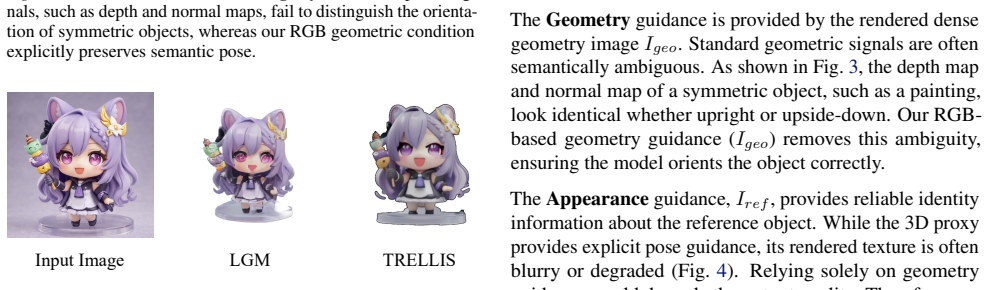
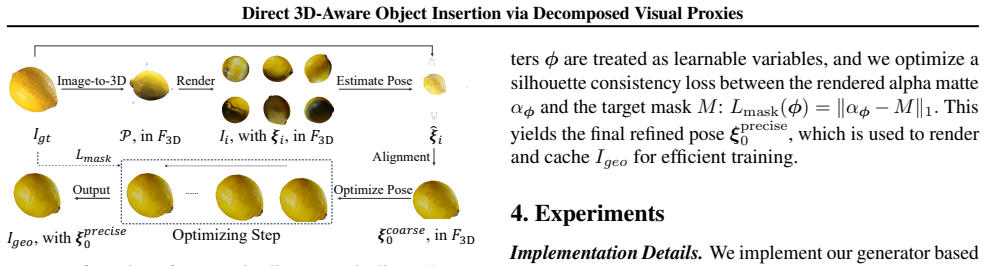
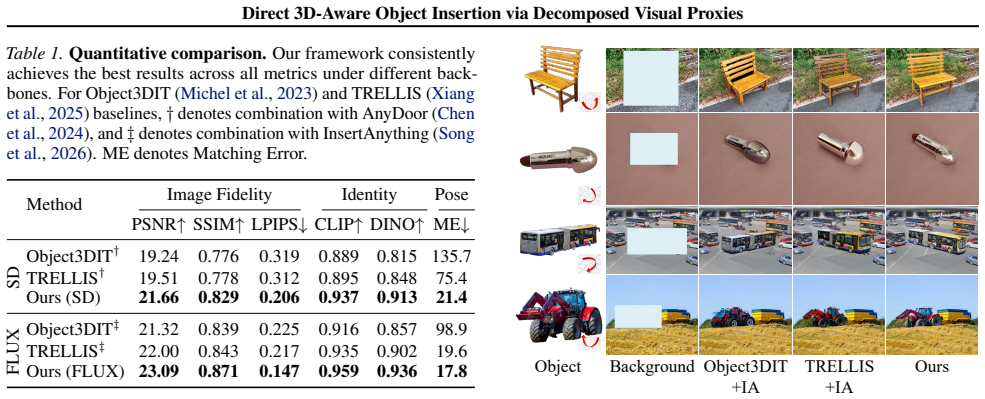
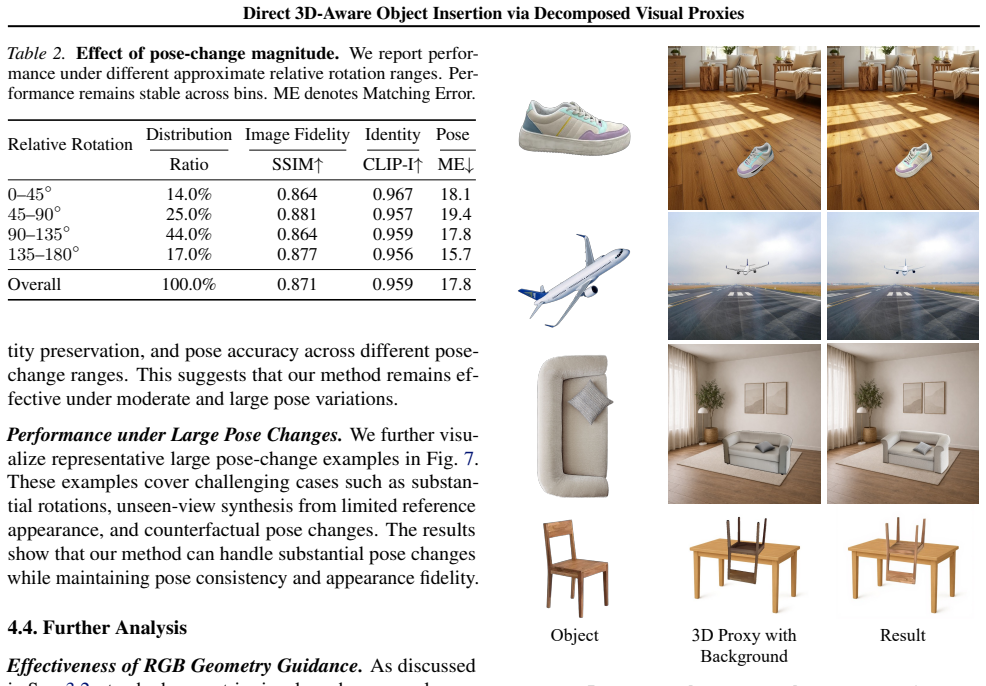
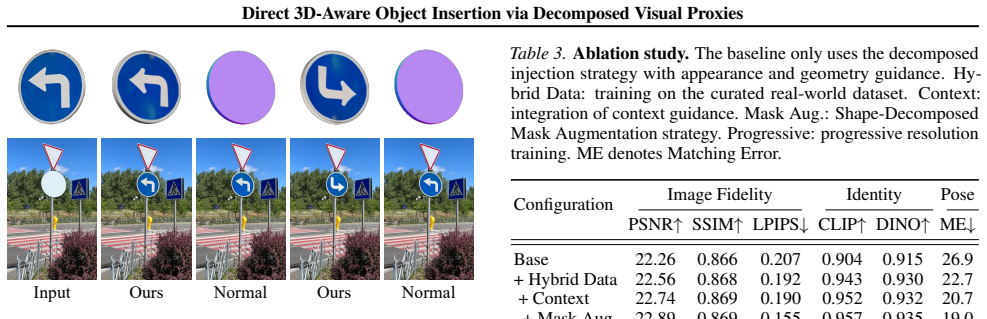
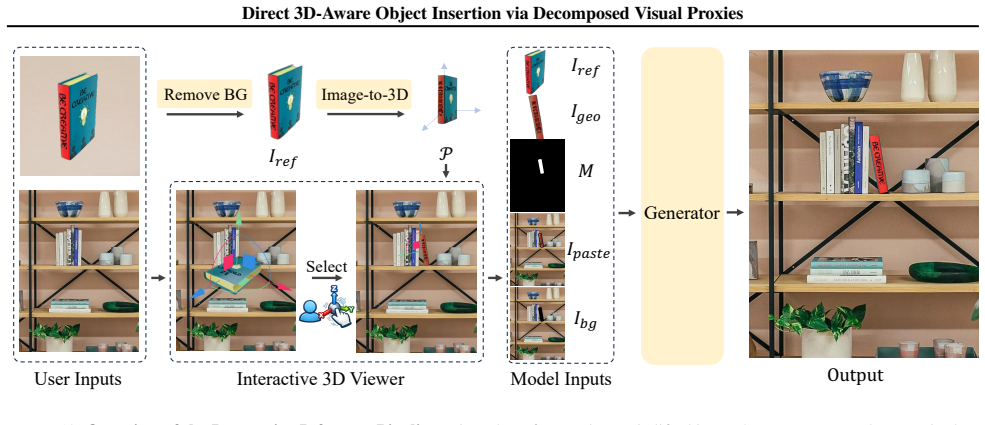
Object insertion aims to seamlessly composite a reference object into a specified region of a background image. Recent diffusion-based methods achieve high visual quality but formulate insertion as a simple 2D inpainting task, providing no explicit control over the object's 3D pose and limiting their practical applicability. We propose DIRECT (Decomposed Injection for Reference Composition and Target-integration), a novel framework that integrates interactive pose manipulation with high-fidelity 2D image synthesis to enable pose-controllable object insertion. Our method decomposes the insertion conditions into three complementary components: appearance guidance capturing visual details from the reference object, geometry guidance derived from the user-adjusted 3D proxy, and context guidance from the target background. By injecting them through separate pathways, DIRECT avoids feature entanglement and simultaneously preserves reference appearance, follows the user-specified pose, and adapts the object to the target scene. We also introduce an automated data construction pipeline to improve the diversity and quality of training data. Experiments show that DIRECT outperforms previous methods in both geometric controllability and visual quality.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DIRECT, a diffusion-based framework for object insertion that decomposes conditions into appearance guidance from the reference, geometry guidance from a user-adjusted 3D proxy, and context guidance from the target scene. These are injected via separate pathways into the model to avoid feature entanglement, enabling simultaneous preservation of appearance, adherence to specified 3D pose, and adaptation to the background. An automated data construction pipeline is introduced to enhance training data, and experiments claim superior geometric controllability and visual quality over prior methods.
Significance. If the disentanglement via separate pathways holds and is validated quantitatively, the work would advance controllable object insertion beyond 2D inpainting, offering practical 3D pose manipulation useful for scene editing and AR applications. The data pipeline could also support future reproducibility in diffusion-based editing tasks.
major comments (2)
- [Abstract] Abstract: The claim of outperformance in geometric controllability and visual quality is stated without any quantitative metrics, ablation studies, or implementation details, preventing assessment of the central claims about independent control and quality gains.
- [§3] §3 (method description): The assertion that routing appearance, geometry-from-3D-proxy, and context through separate pathways avoids feature entanglement lacks any explicit mechanism (e.g., orthogonal losses, pathway-specific normalization, or attention isolation) to prevent mixing in the shared UNet backbone and cross-attention layers; this makes the independent control claim vulnerable to the possibility that results stem from data biases rather than the decomposition.
minor comments (1)
- [Abstract] The abstract mentions an automated data construction pipeline but provides no details on its steps or how it improves diversity/quality; this should be expanded in the main text for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript accordingly to strengthen the presentation of our claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim of outperformance in geometric controllability and visual quality is stated without any quantitative metrics, ablation studies, or implementation details, preventing assessment of the central claims about independent control and quality gains.
Authors: The abstract is intentionally concise, while the full manuscript provides quantitative metrics, ablations, and implementation details in the experiments section. To better support the claims within the abstract itself, we will revise it to include brief references to key quantitative results on geometric controllability and visual quality. revision: yes
-
Referee: [§3] §3 (method description): The assertion that routing appearance, geometry-from-3D-proxy, and context through separate pathways avoids feature entanglement lacks any explicit mechanism (e.g., orthogonal losses, pathway-specific normalization, or attention isolation) to prevent mixing in the shared UNet backbone and cross-attention layers; this makes the independent control claim vulnerable to the possibility that results stem from data biases rather than the decomposition.
Authors: The decomposition is implemented via distinct conditioning pathways for each guidance type into the shared UNet. We acknowledge that the current description does not include additional explicit mechanisms such as orthogonal losses to further enforce separation. We will revise §3 to provide a more detailed account of the injection process and add an ablation comparing separate versus joint conditioning to empirically support that the observed control arises from the decomposition. revision: yes
Circularity Check
No circularity: architectural decomposition presented without self-referential reductions or fitted predictions
full rationale
The provided abstract and description contain no equations, fitted parameters, or self-citations that bear the central claim. The method is described as a decomposition into three guidance components injected via separate pathways; this is an architectural proposal whose validity is asserted to be shown by experiments rather than derived by construction from its own inputs. No load-bearing step reduces to a self-definition, renamed known result, or author-prior ansatz. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Paint by example: Exemplar-based image editing with diffusion models , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[2]
International Conference on Machine Learning , pages=
Learning transferable visual models from natural language supervision , author=. International Conference on Machine Learning , pages=
-
[3]
Structured
Xiang, Jianfeng and Lv, Zelong and Xu, Sicheng and Deng, Yu and Wang, Ruicheng and Zhang, Bowen and Chen, Dong and Tong, Xin and Yang, Jiaolong , booktitle=. Structured
-
[4]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
The unreasonable effectiveness of deep features as a perceptual metric , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[5]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Emerging properties in self-supervised vision transformers , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[6]
International Conference on Learning Representations , year=
Flow Matching for Generative Modeling , author=. International Conference on Learning Representations , year=
-
[7]
International Conference on Machine Learning , year=
Scaling rectified flow transformers for high-resolution image synthesis , author=. International Conference on Machine Learning , year=
-
[8]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Objectstitch: Object compositing with diffusion model , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[9]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Imprint: Generative object compositing by learning identity-preserving representation , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[10]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Anydoor: Zero-shot object-level image customization , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[11]
Insert Anything: Image insertion via in-context editing in
Song, Wensong and Jiang, Hong and Yang, Zongxing and Cheng, Zheqiao and Quan, Ruijie and Yang, Yi , booktitle=. Insert Anything: Image insertion via in-context editing in
-
[12]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Leftrefill: Filling right canvas based on left reference through generalized text-to-image diffusion model , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[13]
Object 3dit: Language-guided
Michel, Oscar and Bhattad, Anand and VanderBilt, Eli and Krishna, Ranjay and Kembhavi, Aniruddha and Gupta, Tanmay , journal=. Object 3dit: Language-guided
-
[14]
Neural assets:
Wu, Ziyi and Rubanova, Yulia and Kabra, Rishabh and Hudson, Drew A and Gilitschenski, Igor and Aytar, Yusuf and Van Steenkiste, Sjoerd and Allen, Kelsey R and Kipf, Thomas , journal=. Neural assets:
-
[15]
Diffusion handles enabling
Pandey, Karran and Guerrero, Paul and Gadelha, Matheus and Hold-Geoffroy, Yannick and Singh, Karan and Mitra, Niloy J , booktitle=. Diffusion handles enabling
-
[16]
Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , pages=
Geodiffuser: Geometry-based image editing with diffusion models , author=. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , pages=
-
[17]
Image sculpting: Precise object editing with
Yenphraphai, Jiraphon and Pan, Xichen and Liu, Sainan and Panozzo, Daniele and Xie, Saining , booktitle=. Image sculpting: Precise object editing with
-
[18]
Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , pages=
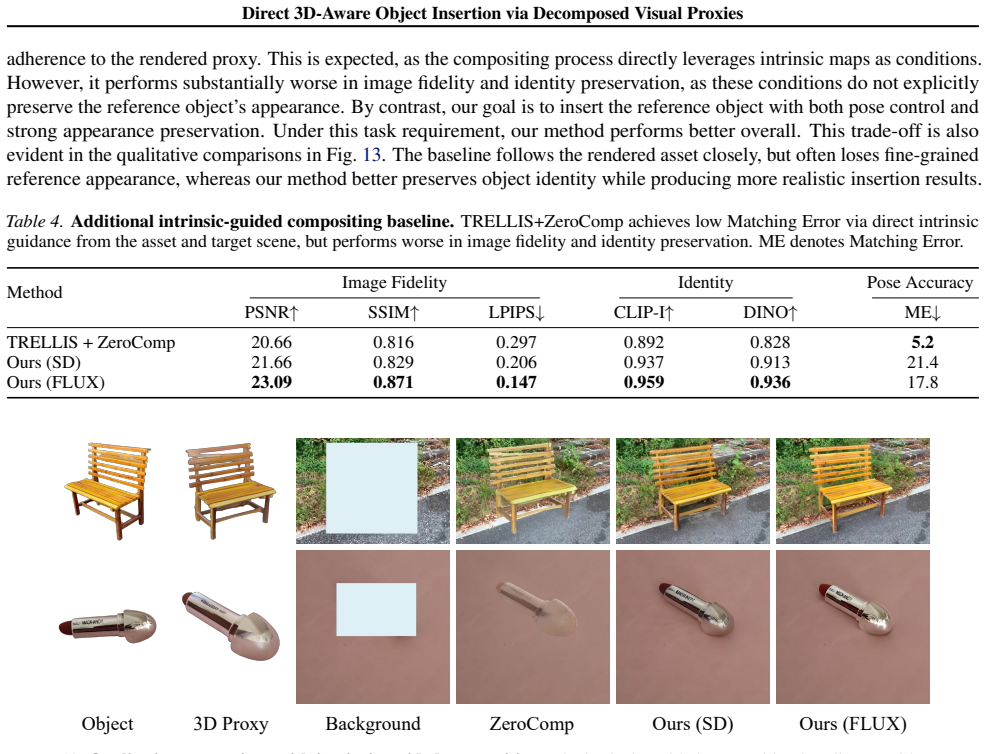
Zerocomp: Zero-shot object compositing from image intrinsics via diffusion , author=. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , pages=
-
[19]
Ge, Yunhao and Yu, Hong-Xing and Zhao, Cheng and Guo, Yuliang and Huang, Xinyu and Ren, Liu and Itti, Laurent and Wu, Jiajun , journal=
-
[20]
2024 , howpublished=
2024
-
[21]
CAAI Artificial Intelligence Research , year=
Bilateral Reference for High-Resolution Dichotomous Image Segmentation , author=. CAAI Artificial Intelligence Research , year=
-
[22]
Viser: Imperative, web-based
Yi, Brent and Kim, Chung Min and Kerr, Justin and Wu, Gina and Feng, Rebecca and Zhang, Anthony and Kulhanek, Jonas and Choi, Hongsuk and Ma, Yi and Tancik, Matthew and Kanazawa, Angjoo , journal=. Viser: Imperative, web-based
-
[23]
Neurocomputing , volume=
Roformer: Enhanced transformer with rotary position embedding , author=. Neurocomputing , volume=. 2024 , publisher=
2024
-
[24]
Tschannen, Michael and Gritsenko, Alexey and Wang, Xiao and Naeem, Muhammad Ferjad and Alabdulmohsin, Ibrahim and Parthasarathy, Nikhil and Evans, Talfan and Beyer, Lucas and Xia, Ye and Mustafa, Basil and others , journal=
-
[25]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Mvimgnet: A large-scale dataset of multi-view images , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[26]
Shuai Bai and Yuxuan Cai and Ruizhe Chen and Keqin Chen and Xionghui Chen and Zesen Cheng and Lianghao Deng and Wei Ding and Chang Gao and Chunjiang Ge and Wenbin Ge and Zhifang Guo and Qidong Huang and Jie Huang and Fei Huang and Binyuan Hui and Shutong Jiang and Zhaohai Li and Mingsheng Li and Mei Li and Kaixin Li and Zicheng Lin and Junyang Lin and Xue...
-
[27]
Carion, Nicolas and Gustafson, Laura and Hu, Yuan-Ting and Debnath, Shoubhik and Hu, Ronghang and Suris, Didac and Ryali, Chaitanya and Alwala, Kalyan Vasudev and Khedr, Haitham and Huang, Andrew and others , journal=
-
[28]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Towards enhanced image inpainting: Mitigating unwanted object insertion and preserving color consistency , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[29]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
High-resolution image synthesis with latent diffusion models , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[30]
Poole, Ben and Jain, Ajay and Barron, Jonathan T and Mildenhall, Ben , booktitle=
-
[31]
Lin, Chen-Hsuan and Gao, Jun and Tang, Luming and Takikawa, Towaki and Zeng, Xiaohui and Huang, Xun and Kreis, Karsten and Fidler, Sanja and Liu, Ming-Yu and Lin, Tsung-Yi , booktitle=
-
[32]
2021 , publisher=
Mildenhall, Ben and Srinivasan, Pratul P and Tancik, Matthew and Barron, Jonathan T and Ramamoorthi, Ravi and Ng, Ren , journal=. 2021 , publisher=
2021
-
[33]
Hong, Yicong and Zhang, Kai and Gu, Jiuxiang and Bi, Sai and Zhou, Yang and Liu, Difan and Liu, Feng and Sunkavalli, Kalyan and Bui, Trung and Tan, Hao , booktitle=
-
[34]
Lgm: Large multi-view gaussian model for high-resolution
Tang, Jiaxiang and Chen, Zhaoxi and Chen, Xiaokang and Wang, Tengfei and Zeng, Gang and Liu, Ziwei , booktitle=. Lgm: Large multi-view gaussian model for high-resolution
-
[35]
Gaussiananything: Interactive point cloud flow matching for
Lan, Yushi and Zhou, Shangchen and Lyu, Zhaoyang and Hong, Fangzhou and Yang, Shuai and Dai, Bo and Pan, Xingang and Loy, Chen Change , booktitle=. Gaussiananything: Interactive point cloud flow matching for
-
[36]
Lai, Zeqiang and Zhao, Yunfei and Liu, Haolin and Zhao, Zibo and Lin, Qingxiang and Shi, Huiwen and Yang, Xianghui and Yang, Mingxin and Yang, Shuhui and Feng, Yifei and others , journal=
-
[37]
2024 , journal=
Repositioning the Subject within Image , author=. 2024 , journal=
2024
-
[38]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Segment anything , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[39]
Wang, Jianyuan and Chen, Minghao and Karaev, Nikita and Vedaldi, Andrea and Rupprecht, Christian and Novotny, David , booktitle=
-
[40]
Wu, Chenfei and Li, Jiahao and Zhou, Jingren and Lin, Junyang and Gao, Kaiyuan and Yan, Kun and Yin, Sheng-ming and Bai, Shuai and Xu, Xiao and Chen, Yilei and others , journal=
-
[41]
Common Objects in
Reizenstein, Jeremy and Shapovalov, Roman and Henzler, Philipp and Sbordone, Luca and Labatut, Patrick and Novotny, David , booktitle=. Common Objects in
-
[42]
Cheng, Yen-Chi and Singh, Krishna Kumar and Yoon, Jae Shin and Schwing, Alexander and Gui, Liang-Yan and Gadelha, Matheus and Guerrero, Paul and Zhao, Nanxuan , booktitle=
-
[43]
Shape-for-motion: Precise and consistent video editing with
Liu, Yuhao and Wang, Tengfei and Liu, Fang and Wang, Zhenwei and Lau, Rynson WH , booktitle=. Shape-for-motion: Precise and consistent video editing with
-
[44]
Edward J Hu and Yelong Shen and Phillip Wallis and Zeyuan Allen-Zhu and Yuanzhi Li and Shean Wang and Lu Wang and Weizhu Chen , booktitle=. Lo
-
[45]
Neural Information Processing Systems Workshop on Deep Generative Models and Downstream Applications , year=
Classifier-Free Diffusion Guidance , author=. Neural Information Processing Systems Workshop on Deep Generative Models and Downstream Applications , year=
-
[46]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Ominicontrol: Minimal and universal control for diffusion transformer , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[47]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Easycontrol: Adding efficient and flexible control for diffusion transformer , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[48]
arXiv preprint arXiv:2511.20614 , year=
The Consistency Critic: Correcting Inconsistencies in Generated Images via Reference-Guided Attentive Alignment , author=. arXiv preprint arXiv:2511.20614 , year=
-
[49]
Nano Banana Pro , howpublished =
-
[50]
Grounding image matching in
Leroy, Vincent and Cabon, Yohann and Revaud, J. Grounding image matching in. European Conference on Computer Vision , pages=
-
[51]
Exploring
Wang, Jianyi and Chan, Kelvin CK and Loy, Chen Change , booktitle=. Exploring
-
[52]
Q-Align: Teaching LMMs for Visual Scoring via Discrete Text-Defined Levels
Q-Align: Teaching LMMs for Visual Scoring via Discrete Text-Defined Levels , author=. arXiv preprint arXiv:2312.17090 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[53]
1971 , publisher=
Accommodation in computer vision , author=. 1971 , publisher=
1971
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.