CWI: Composite Humanoid Whole-Body Imitation System for Loco-manipulation
Pith reviewed 2026-06-29 04:59 UTC · model grok-4.3
The pith
Decoupling motion-capture data for upper and lower bodies enables stable humanoid loco-manipulation from partial observations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
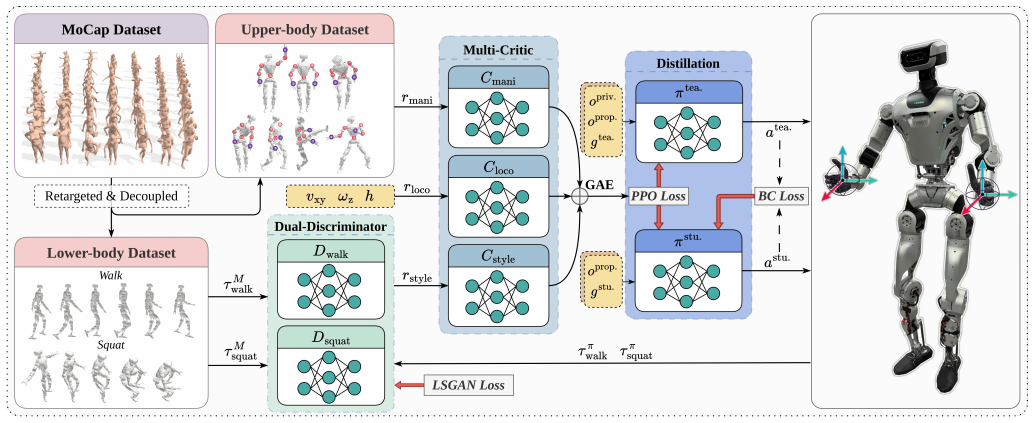
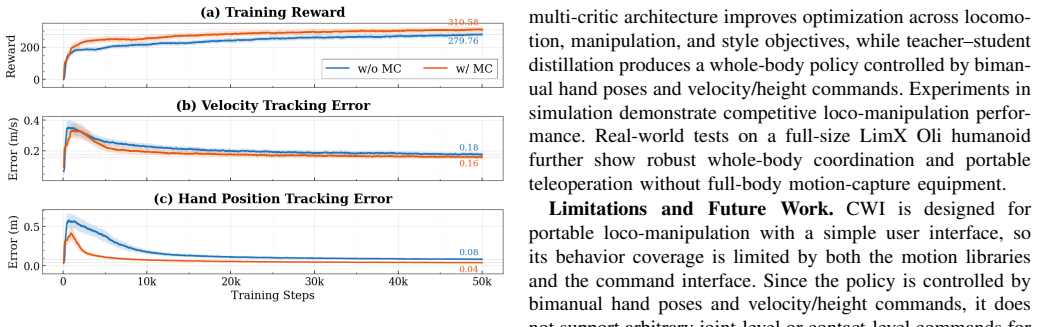
Composite Whole-Body Imitation (CWI) decouples the use of MoCap data for upper-body manipulation and lower-body locomotion. This decoupling allows exploitation of the full MoCap dataset of diverse manipulation references, while stable, command-conditioned lower-body locomotion is guided by dual discriminators trained on curated expert-quality walking and squatting clips via an Adversarial Motion Prior (AMP). A multi-critic architecture reduces conflicts among locomotion, manipulation, and motion-style objectives, and a teacher-student distillation stage yields a whole-body policy conditioned only on bimanual hand poses and velocity/height commands.
What carries the argument
The Composite Whole-Body Imitation (CWI) framework that separates full MoCap manipulation references from locomotion training guided by dual discriminators and a multi-critic architecture.
If this is right
- The full MoCap dataset becomes usable for manipulation without aggressive filtering to protect locomotion stability.
- Lower-body motion stays stable under command conditioning through dual discriminators on curated clips.
- The final policy operates from bimanual hand poses and velocity/height commands alone after distillation.
- Competitive loco-manipulation performance and robust whole-body coordination appear in both simulation and real-robot tests.
- Teleoperation becomes practical without full-body motion-capture equipment.
Where Pith is reading between the lines
- The separation of data sources could apply to other robot control problems where different body segments need mismatched reference quality or quantity.
- Reducing sensor demands to hand poses and commands may lower the cost of deploying humanoids for tasks that mix walking and object handling.
- The same decoupling pattern might be tested with added visual inputs to move from teleoperation toward more autonomous behavior.
Load-bearing premise
The assumption that a multi-critic architecture with dual discriminators on curated lower-body clips will eliminate conflicts between locomotion, manipulation, and style objectives without requiring extensive additional tuning or data filtering.
What would settle it
If the distilled policy deployed on the LimX Oli humanoid produces unstable locomotion or poor manipulation success rates when driven only by bimanual hand poses and velocity/height commands, the claim of effective coordination from the decoupled training would be refuted.
Figures
read the original abstract
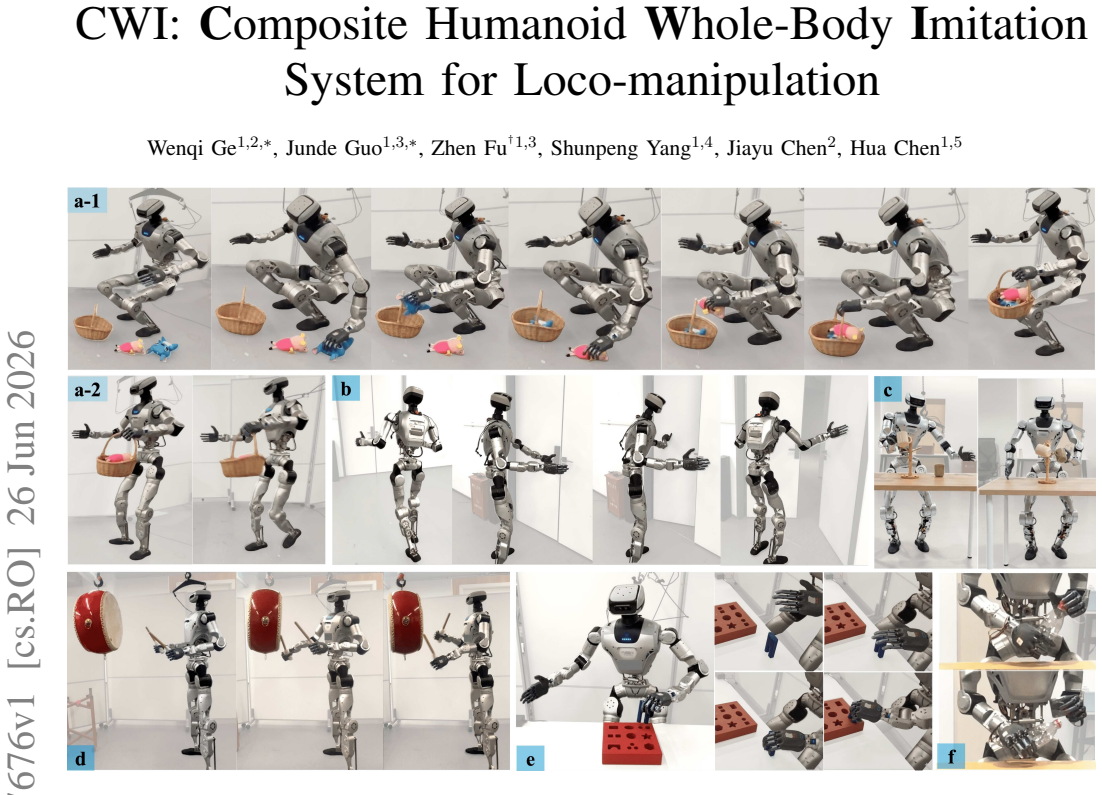
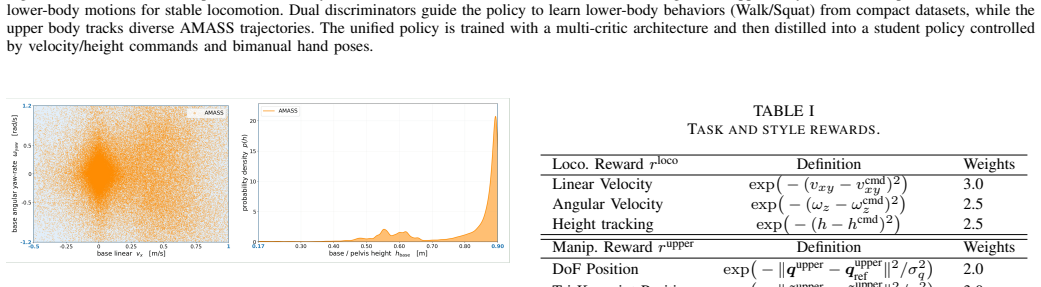
Achieving everyday tasks with humanoid robots requires coordinating stable locomotion with versatile manipulation. However, existing whole-body controllers still face significant challenges. Methods trained solely via command sampling, without motion-capture (MoCap) data, often struggle with sparse rewards and require carefully tuned curricula to converge. This is especially problematic for upper-body control, where the resulting motions deviate from human-like statistics and degrade whole-body coordination. Conversely, approaches that imitate full-body MoCap data suffer from dataset imbalance, as many locomotion trajectories are overly aggressive for stable-locomotion scenarios, necessitating extensive data filtering and augmentation. To address this, we present Composite Whole-Body Imitation (CWI), a framework that decouples the use of MoCap data for upper-body manipulation and lower-body locomotion. This decoupling allows us to exploit the full MoCap dataset of diverse manipulation references, while stable, command-conditioned lower-body locomotion is guided by dual discriminators trained on curated expert-quality walking and squatting clips via an Adversarial Motion Prior (AMP). A multi-critic architecture reduces conflicts among locomotion, manipulation, and motion-style objectives, and a teacher--student distillation stage yields a whole-body policy conditioned only on bimanual hand poses and velocity/height commands. We evaluate CWI through simulation experiments and real-world deployment on a full-size LimX Oli humanoid. The results show competitive loco-manipulation performance, robust whole-body coordination, and practical teleoperation without full-body motion-capture equipment. A project page with supplementary material can be found at https://cwi-ral.github.io/CWI-RAL-Webpage.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents Composite Whole-Body Imitation (CWI), a framework for humanoid loco-manipulation that decouples MoCap data for upper-body manipulation (exploiting full diverse datasets) from lower-body locomotion (guided by dual discriminators on curated walking/squatting clips via AMP). A multi-critic architecture is introduced to reduce conflicts among locomotion, manipulation, and style objectives; a teacher-student distillation stage produces a deployable policy conditioned only on bimanual hand poses plus velocity/height commands. Evaluation consists of simulation experiments and real-world deployment on a LimX Oli humanoid, with claims of competitive performance, robust coordination, and practical teleoperation without full-body MoCap.
Significance. If the multi-critic and dual-discriminator design demonstrably orthogonalizes the objectives without extensive additional tuning, the decoupling strategy would meaningfully lower data-preparation barriers in whole-body imitation learning and support more scalable humanoid controllers. The teacher-student stage for sensor reduction is a practical contribution that could be adopted independently.
major comments (2)
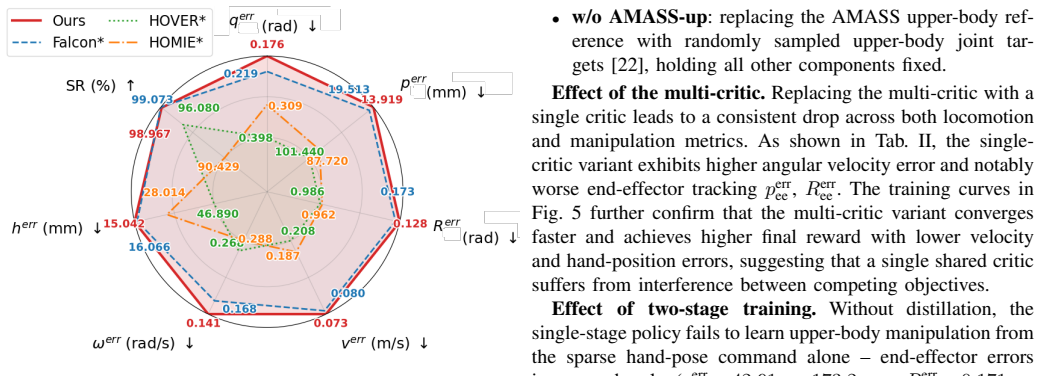
- [Abstract and §4] Abstract and §4 (Method): The central claim that the multi-critic architecture 'reduces conflicts among locomotion, manipulation, and motion-style objectives' is load-bearing for the assertion that CWI avoids 'extensive data filtering and augmentation.' No ablation comparing single-critic vs. multi-critic variants, no loss-curve analysis, and no quantitative metrics of residual interference (e.g., foot-slip rate during manipulation or style degradation scores) are reported. Without such evidence the claim that dual discriminators on curated clips suffice remains unverified.
- [§5] §5 (Experiments): The statement of 'competitive loco-manipulation performance' and 'robust whole-body coordination' lacks explicit baselines, task definitions, and numerical metrics (success rates, tracking errors, stability measures) that would allow direct comparison to prior full-body AMP or command-sampling methods. This makes it impossible to assess whether the reported real-world deployment on LimX Oli substantiates the coordination improvement.
minor comments (1)
- [Abstract] The project page URL is given but the manuscript does not indicate which supplementary videos or code artifacts correspond to the quantitative claims in §5.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight areas where additional evidence and clarity would strengthen the presentation of the multi-critic architecture and experimental results. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Method): The central claim that the multi-critic architecture 'reduces conflicts among locomotion, manipulation, and motion-style objectives' is load-bearing for the assertion that CWI avoids 'extensive data filtering and augmentation.' No ablation comparing single-critic vs. multi-critic variants, no loss-curve analysis, and no quantitative metrics of residual interference (e.g., foot-slip rate during manipulation or style degradation scores) are reported. Without such evidence the claim that dual discriminators on curated clips suffice remains unverified.
Authors: We agree that the manuscript would be strengthened by explicit ablations. Section 4 motivates the multi-critic design to mitigate objective conflicts, but direct single-critic comparisons, loss-curve analyses, and quantitative interference metrics (such as foot-slip rates) are not included in the current version. We will add these ablations and metrics in the revised manuscript to provide the requested verification. revision: yes
-
Referee: [§5] §5 (Experiments): The statement of 'competitive loco-manipulation performance' and 'robust whole-body coordination' lacks explicit baselines, task definitions, and numerical metrics (success rates, tracking errors, stability measures) that would allow direct comparison to prior full-body AMP or command-sampling methods. This makes it impossible to assess whether the reported real-world deployment on LimX Oli substantiates the coordination improvement.
Authors: Section 5 reports simulation results with comparisons to full-body AMP baselines along with success rates and tracking errors. However, we acknowledge that task definitions, numerical tables, and stability measures could be presented more explicitly to facilitate direct comparisons. We will revise §5 to include clearer baseline specifications, expanded metrics, and additional details on the real-world LimX Oli deployment. revision: yes
Circularity Check
No significant circularity; framework uses standard components without self-referential reduction
full rationale
The abstract and provided text describe CWI as decoupling MoCap usage for upper/lower body, applying dual discriminators on curated clips via established AMP, a multi-critic architecture, and teacher-student distillation. No equations, fitted parameters, or derivation steps are exhibited that reduce any claimed prediction or result to its inputs by construction. AMP is referenced as a known method rather than a self-citation chain bearing the central claim. The architecture is presented as addressing conflicts via design choices, but this does not constitute circularity under the enumerated patterns; the paper remains self-contained against external benchmarks with no load-bearing self-definition or renaming of known results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Z. Gu, J. Li, W. Shen, W. Yu, Z. Xie, S. McCrory, X. Cheng, A. Shamsah, R. Griffin, C. K. Liuet al., “Humanoid locomotion and manipulation: Current progress and challenges in control, planning, and learning,”arXiv preprint arXiv:2501.02116, 2025
-
[2]
Autonomous behavior planning for humanoid loco-manipulation through grounded language model,
J. Wang, A. Laurenzi, and N. Tsagarakis, “Autonomous behavior planning for humanoid loco-manipulation through grounded language model,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 10 856–10 863
2024
-
[3]
Learn- ing perceptive humanoid locomotion over challenging terrain,
W. Sun, B. Cao, L. Chen, Y . Su, Y . Liu, Z. Xie, and H. Liu, “Learn- ing perceptive humanoid locomotion over challenging terrain,”arXiv preprint arXiv:2503.00692, 2025
-
[4]
Adversarial locomotion and motion imitation for humanoid policy learning,
J. Shi, X. Liu, D. Wang, O. Lu, S. Schwertfeger, C. Zhang, F. Sun, C. Bai, and X. Li, “Adversarial locomotion and motion imitation for humanoid policy learning,”arXiv preprint arXiv:2504.14305, 2025
-
[5]
arXiv preprint arXiv:2406.10454 , year=
Z. Fu, Q. Zhao, Q. Wu, G. Wetzstein, and C. Finn, “Humanplus: Humanoid shadowing and imitation from humans,”arXiv preprint arXiv:2406.10454, 2024
-
[6]
Sim-to-real reinforcement learning for vision-based dexterous manipulation on humanoids,
T. Lin, K. Sachdev, L. Fan, J. Malik, and Y . Zhu, “Sim-to-real reinforce- ment learning for vision-based dexterous manipulation on humanoids,” arXiv preprint arXiv:2502.20396, 2025
-
[7]
BeyondMimic: From Motion Tracking to Versatile Humanoid Control via Guided Diffusion
Q. Liao, T. E. Truong, X. Huang, G. Tevet, K. Sreenath, and C. K. Liu, “Beyondmimic: From motion tracking to versatile humanoid control via guided diffusion,”arXiv preprint arXiv:2508.08241, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
- [8]
-
[9]
Hover: Versatile neural whole-body controller for humanoid robots,
T. He, W. Xiao, T. Lin, Z. Luo, Z. Xu, Z. Jiang, J. Kautz, C. Liu, G. Shi, X. Wanget al., “Hover: Versatile neural whole-body controller for humanoid robots,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 9989–9996
2025
-
[10]
arXiv preprint arXiv:2406.08858 , year=
T. He, Z. Luo, X. He, W. Xiao, C. Zhang, W. Zhang, K. Kitani, C. Liu, and G. Shi, “Omnih2o: Universal and dexterous human- to-humanoid whole-body teleoperation and learning,”arXiv preprint arXiv:2406.08858, 2024
- [11]
-
[12]
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Z. Luo, Y . Yuan, T. Wang, C. Li, S. Chen, F. Casta˜neda, Z.-A. Cao, J. Li, D. Minor, Q. Benet al., “Sonic: Supersizing motion tracking for natural humanoid whole-body control,”arXiv preprint arXiv:2511.07820, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[13]
Agility meets stability: Versatile humanoid control with heterogeneous data,
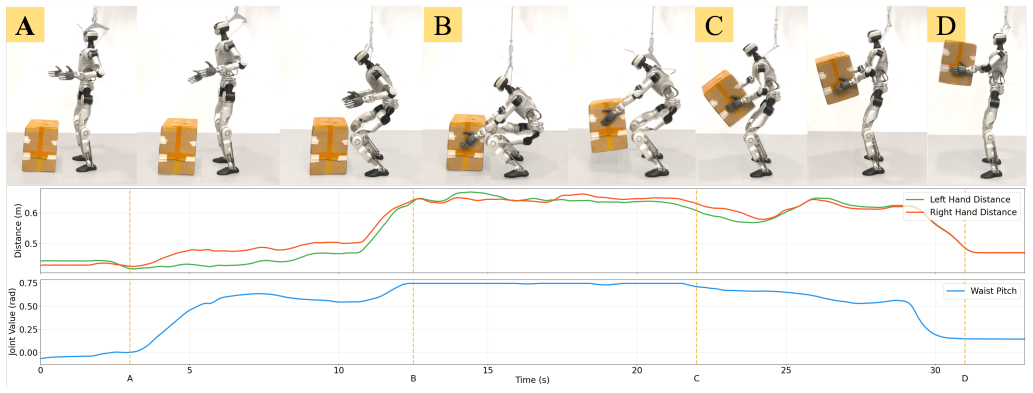
Y . Pan, R. Qiao, L. Chen, K. Chitta, L. Pan, H. Mai, Q. Bu, H. Zhao, C. Zheng, P. Luoet al., “Agility meets stability: Versatile humanoid control with heterogeneous data,”arXiv preprint arXiv:2511.17373, 2025. Fig. 6. Real-world whole-body coordination during a box-lifting task. Top: snapshots of four phases — (A) approaching and squatting to reach the b...
-
[14]
Y . Li, Z. Luo, T. Zhang, C. Dai, A. Kanervisto, A. Tirinzoni, H. Weng, K. Kitani, M. Guzek, A. Touatiet al., “Bfm-zero: A promptable behavioral foundation model for humanoid control using unsupervised reinforcement learning,”arXiv preprint arXiv:2511.04131, 2025
-
[15]
Gentlehu- manoid: Learning upper-body compliance for contact-rich human and object interaction,
Q. Lu, Y . Feng, B. Shi, M. Piseno, Z. Bao, and C. K. Liu, “Gentlehu- manoid: Learning upper-body compliance for contact-rich human and object interaction,”arXiv preprint arXiv:2511.04679, 2025
-
[16]
Hmc: Learning heterogeneous meta-control for contact-rich loco- manipulation,
L. Wei, X. Peng, R.-Z. Qiu, T. Huang, X. Cheng, and X. Wang, “Hmc: Learning heterogeneous meta-control for contact-rich loco- manipulation,”arXiv preprint arXiv:2511.14756, 2025
-
[17]
Exbody2: Advanced expressive humanoid whole-body control,
M. Ji, X. Peng, F. Liu, J. Li, G. Yang, X. Cheng, and X. Wang, “Exbody2: Advanced expressive humanoid whole-body control,”arXiv preprint arXiv:2412.13196, 2024
-
[18]
Clone: Closed-loop whole-body humanoid teleoperation for long- horizon tasks,
Y . Li, Y . Lin, J. Cui, T. Liu, W. Liang, Y . Zhu, and S. Huang, “Clone: Closed-loop whole-body humanoid teleoperation for long- horizon tasks,”arXiv preprint arXiv:2506.08931, 2025
-
[19]
Ulc: A unified and fine-grained controller for humanoid loco-manipulation,
W. Sun, L. Feng, B. Cao, Y . Liu, Y . Jin, and Z. Xie, “Ulc: A unified and fine-grained controller for humanoid loco-manipulation,”arXiv preprint arXiv:2507.06905, 2025
-
[20]
Twist: Teleoperated whole-body imitation system,
Y . Ze, Z. Chen, J. P. Ara´ujo, Z.-a. Cao, X. B. Peng, J. Wu, and C. K. Liu, “TWIST: Teleoperated whole-body imitation system,”arXiv preprint arXiv:2505.02833, 2025
- [21]
-
[22]
Homie: Humanoid loco-manipulation with isomorphic exoskeleton cockpit,
Q. Ben, F. Jia, J. Zeng, J. Dong, D. Lin, and J. Pang, “Homie: Humanoid loco-manipulation with isomorphic exoskeleton cockpit,”arXiv preprint arXiv:2502.13013, 2025
-
[23]
Amo: Adaptive motion optimization for hyper-dexterous humanoid whole- body control,
J. Li, X. Cheng, T. Huang, S. Yang, R. Qiu, and X. Wang, “Amo: Adaptive motion optimization for hyper-dexterous humanoid whole- body control,”Robotics: Science and Systems 2025, 2025
2025
-
[24]
Hugwbc: A unified and general humanoid whole-body controller for versatile locomotion,
Y . Xue, W. Dong, M. Liu, W. Zhang, and J. Pang, “Hugwbc: A unified and general humanoid whole-body controller for versatile locomotion,” inRobotics: Science and Systems (RSS), 2025
2025
-
[25]
Deepmimic: Example-guided deep reinforcement learning of physics-based character skills,
X. B. Peng, P. Abbeel, S. Levine, and M. Van de Panne, “Deepmimic: Example-guided deep reinforcement learning of physics-based character skills,”ACM Transactions On Graphics (TOG), vol. 37, no. 4, pp. 1–14, 2018
2018
-
[26]
Amp: Adversarial motion priors for stylized physics-based character control,
X. B. Peng, Z. Ma, P. Abbeel, S. Levine, and A. Kanazawa, “Amp: Adversarial motion priors for stylized physics-based character control,” ACM Transactions on Graphics (ToG), vol. 40, no. 4, pp. 1–20, 2021
2021
-
[27]
Adaptnet: Policy adaptation for physics- based character control,
P. Xu, K. Xie, S. Andrews, P. G. Kry, M. Neff, M. McGuire, I. Karamouzas, and V . Zordan, “Adaptnet: Policy adaptation for physics- based character control,”ACM Transactions on Graphics (TOG), vol. 42, no. 6, pp. 1–17, 2023
2023
-
[28]
Composite motion learning with task control,
P. Xu, X. Shang, V . Zordan, and I. Karamouzas, “Composite motion learning with task control,”ACM Transactions on Graphics (TOG), vol. 42, no. 4, pp. 1–16, 2023
2023
-
[29]
Quadrupedal robot locomotion: a biologically inspired approach and its hardware implementation,
A. Espinal, H. Rostro-Gonzalez, M. Carpio, E. I. Guerra-Hernandez, M. Ornelas-Rodriguez, H. Puga-Soberanes, M. A. Sotelo-Figueroa, and P. Melin, “Quadrupedal robot locomotion: a biologically inspired approach and its hardware implementation,”Computational Intelligence and Neuroscience, vol. 2016, no. 1, p. 5615618, 2016
2016
-
[30]
In-between motion genera- tion based multi-style quadruped robot locomotion,
Y . Chen, L. Zhao, J. Ma, and P. Lu, “In-between motion genera- tion based multi-style quadruped robot locomotion,”arXiv preprint arXiv:2507.23053, 2025
-
[31]
Whole-body humanoid robot locomotion with human reference,
Q. Zhang, P. Cui, D. Yan, J. Sun, Y . Duan, G. Han, W. Zhao, W. Zhang, Y . Guo, A. Zhanget al., “Whole-body humanoid robot locomotion with human reference,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 11 225–11 231
2024
-
[32]
Hwc-loco: A hier- archical whole-body control approach to robust humanoid locomotion,
S. Lin, G. Qiao, Y . Tai, A. Li, K. Jia, and G. Liu, “Hwc-loco: A hier- archical whole-body control approach to robust humanoid locomotion,” arXiv preprint arXiv:2503.00923, 2025
-
[33]
Amass: Archive of motion capture as surface shapes,
N. Mahmood, N. Ghorbani, N. F. Troje, G. Pons-Moll, and M. J. Black, “Amass: Archive of motion capture as surface shapes,” inProceedings of the IEEE/CVF international conference on computer vision, 2019, pp. 5442–5451
2019
-
[34]
Perpetual humanoid control for real-time simulated avatars,
Z. Luo, J. Cao, A. W. Winkler, K. Kitani, and W. Xu, “Perpetual humanoid control for real-time simulated avatars,” inInternational Conference on Computer Vision (ICCV), 2023
2023
-
[35]
Transfer- ring dexterous manipulation from GPU simulation to a remote real-world TriFinger,
A. Allshire, M. Mittal, V . Lodaya, V . Makoviychuk, D. Makoviichuk, F. Widmaier, M. W¨uthrich, S. Bauer, A. Handa, and A. Garg, “Transfer- ring dexterous manipulation from GPU simulation to a remote real-world TriFinger,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, Oct. 2022
2022
-
[36]
Multi-critic learning for whole-body end-effector twist tracking,
A. E. Vijayan, A. Cramariuc, M. Risiglione, C. Gehring, and M. Hutter, “Multi-critic learning for whole-body end-effector twist tracking,”arXiv preprint arXiv:2507.08656, 2025
-
[37]
Constrained style learning from imperfect demonstrations under task optimality,
K. Wen, C. Li, J. He, and M. Hutter, “Constrained style learning from imperfect demonstrations under task optimality,”arXiv preprint arXiv:2507.09371, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.