A Polynomial-Decay and Pinhole-Imaging Whale Optimization Algorithm for UAV Relay Communication Deployment
Pith reviewed 2026-06-27 05:14 UTC · model grok-4.3
The pith
PWOA improves solution quality and convergence speed for five-variable UAV relay placement under five inequality constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper states that combining Good Nodes Set initialization, a polynomial nonlinear schedule for the convergence factor, and a stagnation-triggered pinhole-imaging opposition-based learning operator with elite Gaussian local search produces an algorithm that attains the lowest Best, Worst, Mean, and standard deviation on the five-dimensional UAV relay problem with five inequality constraints, while also showing the fastest average convergence across thirty runs compared with WOA, SCA, and IPSO.
What carries the argument
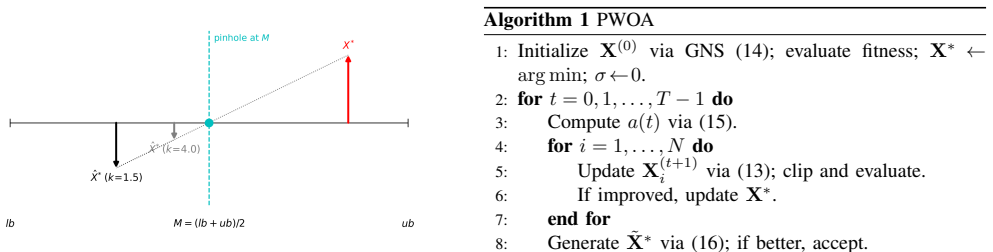
The PWOA algorithm, formed by adding uniform Good Nodes Set initialization, a polynomial decay schedule on the convergence factor, and a pinhole-imaging opposition-based learning step triggered by stagnation together with Gaussian local refinement.
If this is right
- The modified algorithm reaches lower objective values than the three baseline methods on the target deployment task.
- Solution quality varies less across repeated runs when the new operators are used.
- Average convergence occurs in fewer iterations than with unmodified WOA, SCA, or IPSO.
- The same three operators can be inserted into other swarm methods for similar constrained communication problems.
Where Pith is reading between the lines
- Without separate ablation runs it remains unclear how much each of the three changes contributes to the observed gains.
- The approach could be tried on problems with more than five variables or with different constraint structures to test breadth.
- Statistical significance testing on the thirty-run results would strengthen or weaken the reported differences.
Load-bearing premise
Performance gains measured on this single five-dimensional test problem with the three chosen baselines are enough to establish general superiority of the three modifications.
What would settle it
An experiment on a second, differently dimensioned UAV relay instance or an ablation that removes one of the three changes and still shows equivalent mean performance would falsify the claim of consistent improvement.
Figures
read the original abstract
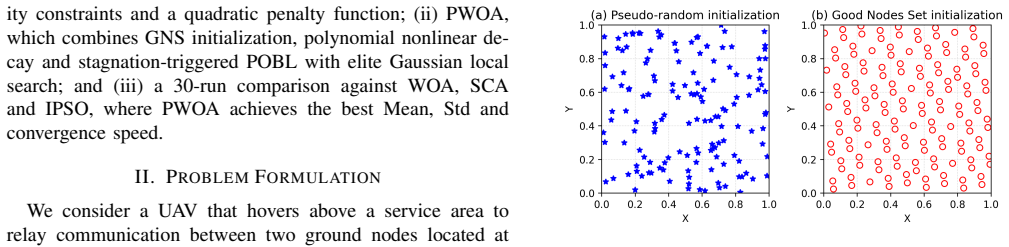
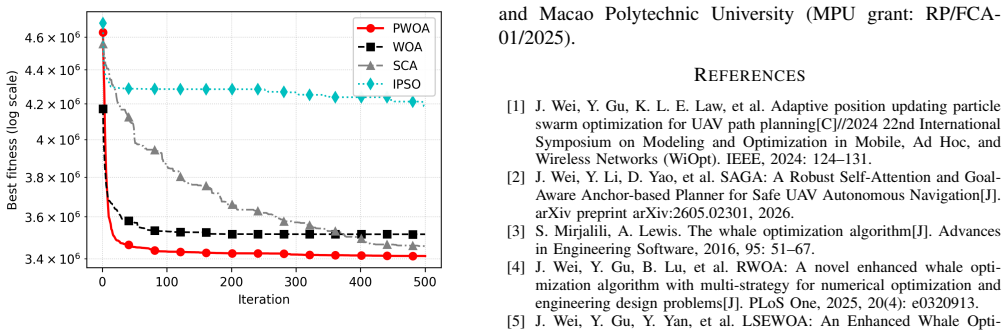
Unmanned aerial vehicle (UAV) relays deliver flexible, on-demand wireless coverage, but jointly tuning the position, altitude, transmit power and bandwidth of the relay is a non-convex, heavily constrained optimization task that easily traps swarm-based optimizers in poor local optima. We propose PWOA, a Polynomial-decay and Pinhole-imaging Whale Optimization Algorithm with three complementary improvements: (i) a Good Nodes Set (GNS) initialization that spreads the initial population uniformly across the search space; (ii) a polynomial nonlinear schedule for the convergence factor that prolongs early exploration and sharpens late exploitation; and (iii) a stagnation-triggered pinhole-imaging opposition-based learning (POBL) operator paired with an elite Gaussian local search, which together escape local optima while refining the leader. On a five-dimensional UAV relay deployment problem with five inequality constraints ($N{=}30$, $T{=}500$, 30 independent runs), PWOA simultaneously attains the lowest Best, Worst, Mean and standard deviation among PWOA, WOA, SCA and IPSO, cutting the mean by $1.4$--$18.5\%$ and the standard deviation by $15$--$87\%$ over the three baselines, and exhibits the fastest average convergence.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes PWOA, a variant of the Whale Optimization Algorithm incorporating three modifications: Good Nodes Set (GNS) initialization for uniform population spread, a polynomial nonlinear schedule for the convergence factor a(t) to balance exploration/exploitation, and a stagnation-triggered pinhole-imaging opposition-based learning (POBL) operator combined with elite Gaussian local search. These are applied to a 5-dimensional UAV relay deployment problem (position, altitude, power, bandwidth) subject to five inequality constraints. On this single instance with N=30, T=500, and 30 independent runs, PWOA is reported to achieve the best Best/Worst/Mean/Std values and fastest convergence versus WOA, SCA, and IPSO, with mean reductions of 1.4–18.5% and std reductions of 15–87%.
Significance. If the reported gains prove robust and attributable to the proposed operators rather than implementation artifacts, the work would offer a practical heuristic enhancement for constrained non-convex UAV communication optimization. The combination of initialization, schedule, and opposition-based escape mechanisms addresses common swarm-optimizer limitations in this domain. However, the evaluation is confined to one low-dimensional test case without ablations or statistical validation, limiting claims of general superiority.
major comments (3)
- [§4] §4 (Experimental Results), Table 1 and convergence curves: the superiority claim (lowest Best/Worst/Mean/Std and fastest convergence) rests on raw numerical differences without any statistical significance tests (Wilcoxon, Friedman, or p-values), error-bar analysis, or multiple independent benchmarks; this leaves open whether the 1.4–18.5% mean and 15–87% std improvements are reliable or due to chance, baseline tuning, or implementation variance on this single 5D instance.
- [§3] §3 (Proposed Method), subsections on GNS, polynomial schedule, and POBL: no ablation experiments are presented that disable each modification in turn (e.g., PWOA without POBL, or with linear instead of polynomial a(t)); consequently the central attribution of performance gains to the three complementary improvements cannot be verified and the ordering versus baselines may not isolate their individual contributions.
- [§4.1] §4.1 (Problem Formulation) and §4.2 (Parameter Settings): the UAV relay problem is defined with five inequality constraints, yet the manuscript supplies neither the exact mathematical formulation of the objective and constraints nor the hyperparameter values used for the baselines (WOA, SCA, IPSO), preventing independent reproduction or assessment of whether the reported gains arise from the claimed mechanisms.
minor comments (2)
- [§3.2] Notation for the polynomial schedule a(t) and the pinhole-imaging operator is introduced without an accompanying equation or pseudocode listing, which would aid clarity.
- [§1] The abstract and §1 cite only three external baselines; a brief discussion of why these particular algorithms were chosen (versus other recent WOA variants) would strengthen the experimental design.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We agree that the points raised identify areas where the manuscript can be strengthened with respect to statistical rigor, component validation, and reproducibility. We address each major comment below and will incorporate the suggested improvements in the revised version.
read point-by-point responses
-
Referee: §4 (Experimental Results), Table 1 and convergence curves: the superiority claim (lowest Best/Worst/Mean/Std and fastest convergence) rests on raw numerical differences without any statistical significance tests (Wilcoxon, Friedman, or p-values), error-bar analysis, or multiple independent benchmarks; this leaves open whether the 1.4–18.5% mean and 15–87% std improvements are reliable or due to chance, baseline tuning, or implementation variance on this single 5D instance.
Authors: We agree that statistical significance testing is required to support the reported performance differences. In the revised manuscript we will add Wilcoxon signed-rank tests (with p-values) comparing PWOA against each baseline over the 30 independent runs. We will also augment the convergence curves with error bars indicating one standard deviation to visualize run-to-run variability. revision: yes
-
Referee: §3 (Proposed Method), subsections on GNS, polynomial schedule, and POBL: no ablation experiments are presented that disable each modification in turn (e.g., PWOA without POBL, or with linear instead of polynomial a(t)); consequently the central attribution of performance gains to the three complementary improvements cannot be verified and the ordering versus baselines may not isolate their individual contributions.
Authors: The referee correctly identifies the lack of ablation studies. We will add a new subsection in the revised experimental section that reports results for three controlled variants: PWOA with linear instead of polynomial a(t), PWOA without the POBL operator, and PWOA without GNS initialization. These ablations will allow readers to assess the contribution of each modification. revision: yes
-
Referee: §4.1 (Problem Formulation) and §4.2 (Parameter Settings): the UAV relay problem is defined with five inequality constraints, yet the manuscript supplies neither the exact mathematical formulation of the objective and constraints nor the hyperparameter values used for the baselines (WOA, SCA, IPSO), preventing independent reproduction or assessment of whether the reported gains arise from the claimed mechanisms.
Authors: We acknowledge these omissions. The revised manuscript will expand §4.1 to include the complete mathematical definition of the objective function together with the five inequality constraints. A new table in §4.2 will list all algorithmic parameters (population size, iteration count, and specific coefficients) used for PWOA, WOA, SCA, and IPSO. revision: yes
Circularity Check
No circularity: empirical comparison against external baselines
full rationale
The paper introduces three algorithmic modifications (GNS initialization, polynomial decay schedule, POBL+Gaussian search) to the external WOA baseline and reports direct numerical performance on one 5D UAV deployment instance versus three independent external algorithms (WOA, SCA, IPSO). These results are obtained by running the implemented optimizers and are not equivalent to the inputs by construction, nor do they rely on self-citation chains, fitted parameters renamed as predictions, or ansatzes smuggled via prior work. The central claim is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard whale optimization algorithm update rules and convergence behavior hold as background.
Reference graph
Works this paper leans on
-
[1]
J. Wei, Y . Gu, K. L. E. Law, et al. Adaptive position updating particle swarm optimization for UA V path planning[C]//2024 22nd International Symposium on Modeling and Optimization in Mobile, Ad Hoc, and Wireless Networks (WiOpt). IEEE, 2024: 124–131
2024
-
[2]
J. Wei, Y . Li, D. Yao, et al. SAGA: A Robust Self-Attention and Goal- Aware Anchor-based Planner for Safe UA V Autonomous Navigation[J]. arXiv preprint arXiv:2605.02301, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[3]
Mirjalili, A
S. Mirjalili, A. Lewis. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51–67
2016
-
[4]
J. Wei, Y . Gu, B. Lu, et al. RWOA: A novel enhanced whale opti- mization algorithm with multi-strategy for numerical optimization and engineering design problems[J]. PLoS One, 2025, 20(4): e0320913
2025
-
[5]
J. Wei, Y . Gu, Y . Yan, et al. LSEWOA: An Enhanced Whale Opti- mization Algorithm with Multi-Strategy for Numerical and Engineering Design Optimization Problems[J]. Sensors, 2025, 25(7): 2054
2025
-
[6]
J. Wei, Y . Gu, Y . Yan, et al. TSWOA: An Enhanced WOA with Triangular Walk and Spiral Flight for Engineering Design Optimiza- tion[C]//2025 8th International Conference on Advanced Algorithms and Control Engineering (ICAACE). IEEE, 2025: 186–194
2025
-
[7]
J. Wei, Y . Gu, Z. Xie, Y . Yan, B. Lu, Z. Li, N. Cheong, et al. (2025) LSWOA: An enhanced whale optimization algorithm with Levy flight and Spiral flight for numerical and engineering design optimization problems. PLoS One, 20(9): e0322058
2025
-
[8]
J. Wei, R. Zhang, Y . Gu, et al. A Geometric Whale Optimization Algorithm with Triangular Flight for Numerical Optimization and En- gineering Design[J]. Scientific Reports, 2026
2026
- [9]
-
[10]
B. Lu, Z. Xie, J. Wei, et al. MRBMO: An Enhanced Red-Billed Blue Magpie Optimization Algorithm for Solving Numerical Optimization Challenges[J]. Symmetry, 2025, 17(8): 1295
2025
-
[11]
J. Wei, Y . Gu, R. Zhang, et al. Nawoa-xgboost: A novel model for early prediction of academic potential in computer science students[C]//2026 6th Asia Conference on Information Engineering (ACIE). Nanyang Technological University, Singapore, 2026: 62–70
2026
-
[12]
Z. Li, W. Zhu, R. Zhang, et al. ASKSSA-CNN-BiLSTM: A Novel Time Series Forecasting Model for Stock Price Prediction Based on An Enhanced Sparrow Search Algorithm[C]//2026 6th Asia Conference on Information Engineering (ACIE). Nanyang Technological University, Singapore, 2026: 20–26
2026
-
[13]
Mirjalili
S. Mirjalili. SCA: A sine cosine algorithm for solving optimization problems[J]. Knowledge-Based Systems, 2016, 96: 120–133
2016
-
[14]
J. Wei, Y . Li, Y . Zhao, et al. Landscape-Aware Bandit Hyper-Heuristics for Online Operator Selection in UA V Inspection Routing[J]. arXiv preprint arXiv:2605.14620, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
- [15]
-
[16]
J. Zhou, Y . Wang, Q. Xie, et al. A UA V Path Planning Method Based on Deep Reinforcement Learning With Dense Rewards[J]. IEEE Open Journal of Vehicular Technology, 2025, 7: 260–272
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.