Robustness of Robotic Manipulation: Foundations and Frontiers
Pith reviewed 2026-07-01 05:42 UTC · model grok-4.3
The pith
A formal definition unifies robustness in robotic manipulation as goal achievement under uncertainty and variation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
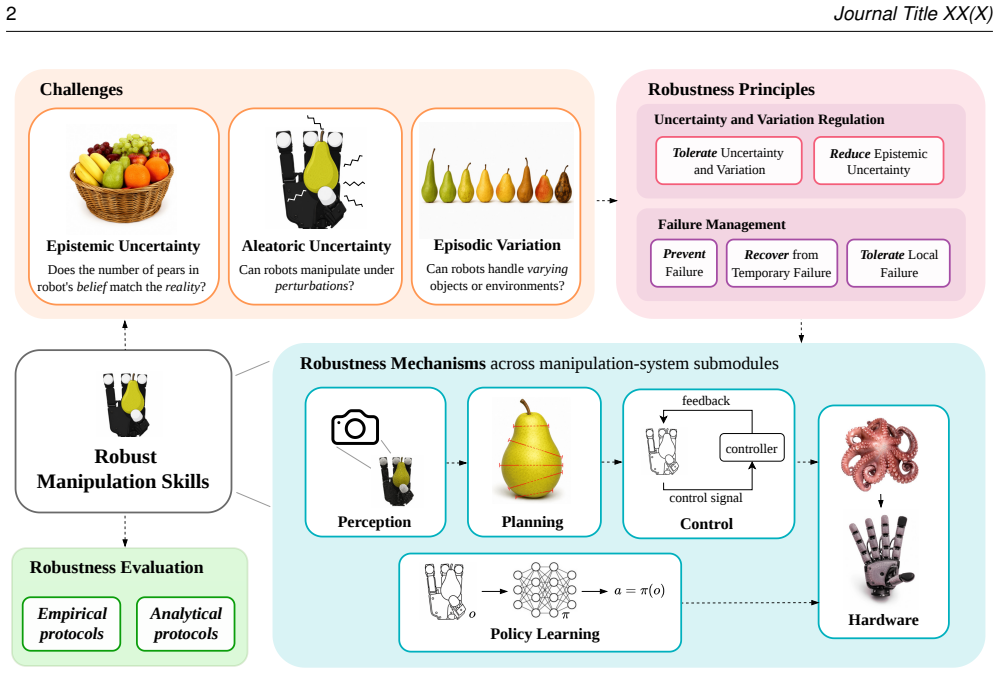
The paper establishes a formal definition of manipulation robustness as the degree to which a manipulation system can achieve its goal in the presence of uncertainty and variation. This definition supports probabilistic and control-theoretic formulations, guides synthesis of mechanisms across perception, planning, control, policy learning, and hardware, and informs metrics and future directions.
What carries the argument
The formal definition of robustness as the degree to which a manipulation system can achieve its goal in the presence of uncertainty and variation, which unifies subfield perspectives.
If this is right
- A single definition enables clearer analysis and communication across perception, planning, control, policy learning, and hardware research.
- Probabilistic and control-theoretic formulations provide consistent ways to model and improve robustness.
- Concrete mechanisms illustrated from existing works can be adapted to design more reliable manipulation systems.
- Standardized metrics allow better comparison and quantification of robustness levels.
- Lessons from the synthesis point to specific open problems for advancing toward human-level manipulation.
Where Pith is reading between the lines
- The definition could be used to create quantitative benchmarks that compare robustness across different robot platforms.
- Integration of the probabilistic view with hardware mechanisms might yield testable hybrid designs for handling sensor variation.
- The identified open problems suggest experiments that measure how well current systems handle combined uncertainties from multiple subfields.
Load-bearing premise
That the distinct framings of robustness across subfields can be unified under one formal definition without losing critical domain-specific insights or creating an overly abstract construct.
What would settle it
A case where applying the unified definition erases a key domain-specific insight, such as a hardware-only robustness strategy that does not map to the general probabilistic or control formulation.
Figures
read the original abstract
Humans and animals exhibit remarkable robustness in physical manipulation, yet robots remain far behind. Progress toward human-level manipulation robustness is hindered by the absence of a unified and systematic understanding: different subfields frame robustness in distinct ways, often leaving the concept ambiguous and limiting deeper analysis as well as communication across research areas. This paper presents a systematic study of manipulation robustness. We begin with a formal definition, characterizing robustness as the degree to which a manipulation system can achieve its goal in the presence of uncertainty and variation. Building on this definition, we introduce general formulations of manipulation robustness from probabilistic and control-theoretic perspectives. We then synthesize the guiding principles and concrete mechanisms of manipulation robustness across perception, planning, control, policy learning, and hardware, illustrating each mechanism through representative works, including foundational and recent studies. In addition, we revisit existing metrics and evaluation methods for quantifying manipulation robustness. Finally, we distill broader lessons for designing robust manipulation systems and discuss open problems and future directions toward achieving human-level robustness in robotic manipulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a systematic study of manipulation robustness in robotics. It begins with a formal definition characterizing robustness as the degree to which a manipulation system can achieve its goal in the presence of uncertainty and variation. Building on this, it introduces general formulations from probabilistic and control-theoretic perspectives, synthesizes guiding principles and concrete mechanisms across perception, planning, control, policy learning, and hardware (with examples from foundational and recent works), revisits existing metrics and evaluation methods, and distills lessons while discussing open problems and future directions toward human-level robustness.
Significance. If the unification under the proposed definition holds without excessive abstraction, the survey could provide a valuable cross-subfield framework for analyzing and designing robust manipulation systems. Its synthesis of mechanisms, formulations, and metrics, combined with explicit discussion of open problems, offers a structured reference that may improve communication across areas and guide future work; the explicit goal of unification is a strength when supported by representative examples.
major comments (1)
- [Formal definition and subsequent synthesis sections] The central unification premise—that distinct framings of robustness across subfields can be brought under one formal definition without losing critical domain-specific insights—is load-bearing for the paper's contribution. The definition in the opening section is broad; without a concrete mapping (e.g., how a perception-specific uncertainty measure translates into the general 'degree' without dilution) the claim risks remaining at a high level of abstraction.
minor comments (2)
- [Metrics and evaluation methods] In the metrics and evaluation section, clarify the distinction between simulation-based and physical-robot metrics with explicit references to the representative works used for illustration.
- [Formulations and synthesis sections] Ensure that the probabilistic and control-theoretic formulations are cross-referenced to the subfield mechanisms so readers can trace how each formulation applies in practice.
Simulated Author's Rebuttal
Thank you for the constructive review and recommendation for minor revision. We address the major comment point-by-point below.
read point-by-point responses
-
Referee: [Formal definition and subsequent synthesis sections] The central unification premise—that distinct framings of robustness across subfields can be brought under one formal definition without losing critical domain-specific insights—is load-bearing for the paper's contribution. The definition in the opening section is broad; without a concrete mapping (e.g., how a perception-specific uncertainty measure translates into the general 'degree' without dilution) the claim risks remaining at a high level of abstraction.
Authors: We agree that explicit mappings strengthen the unification claim. The manuscript already connects domain-specific mechanisms to the general definition through the probabilistic and control-theoretic formulations (Sections 3–4) and illustrates each with representative works (e.g., perception variance mapped via probabilistic robustness in perception sections, control error bounds via the control formulation). However, to make these translations more direct and reduce abstraction risk, we will add a new subsection immediately following the general formulations that provides concrete mappings: for instance, showing how a perception-specific measure (pose estimation covariance) translates into the general 'degree' via the probabilistic formulation without dilution, and analogously for planning and control metrics. This addition will be supported by the existing examples. revision: yes
Circularity Check
No significant circularity; survey paper with independent synthesis
full rationale
The paper is a survey that introduces a formal definition of robustness as a unifying starting point and synthesizes mechanisms from existing literature across subfields. No mathematical derivations, parameter fittings, predictions, or self-referential equations are present in the provided abstract or described structure. The unification premise is explicitly the survey's goal rather than a hidden assumption reducing to prior self-citations or inputs. No load-bearing steps match any enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Robustness in manipulation can be usefully characterized uniformly as the degree to which a system achieves its goal in the presence of uncertainty and variation, allowing synthesis across subfields.
Reference graph
Works this paper leans on
-
[1]
data will solve robotics and automation: True or false?
Achiam J, Held D, Tamar A and Abbeel P (2017) Constrained policy optimization. In:International conference on machine learning. PMLR, pp. 22–31. Aljalbout E, Xing J, Romero A, Akinola I, Garrett CR, Heiden E, Gupta A, Hermans T, Narang Y , Fox D, Scaramuzza D and Ramos F (2025) The reality gap in robotics: Challenges, solutions, and best practices.Annual ...
2017
-
[2]
In:2009 IEEE international conference on robotics and automation
Berenson D, Srinivasa SS, Ferguson D and Kuffner JJ (2009) Manipulation planning on constraint manifolds. In:2009 IEEE international conference on robotics and automation. IEEE, pp. 625–632. Berkeley AI Research (2019) Dexterous manipulation blog image.https://bair.berkeley.edu/static/ blog/dex manip/missing img1.png. Image from BAIR blog on dexterous man...
arXiv 2009
-
[3]
pp. 3387–3395. Chi C, Xu Z, Feng S, Cousineau E, Du Y , Burchfiel B, Tedrake R and Song S (2023) Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research: 02783649241273668. Correll N, Bekris KE, Berenson D, Brock O, Causo A, Hauser K, Okada K, Rodriguez A, Romano JM and Wurman PR (2016) Analysis and...
Pith/arXiv arXiv 2023
-
[4]
In:International conference on formal modeling and analysis of timed systems
Donz´e A and Maler O (2010) Robust satisfaction of temporal logic over real-valued signals. In:International conference on formal modeling and analysis of timed systems. Springer, pp. 92–106. Drake SH (1978)Using compliance in lieu of sensory feedback for automatic assembly.PhD Thesis, Massachusetts Institute of Technology. Driess D, Ha JS and Toussaint M...
2010
-
[5]
Flanagan JR, Bowman MC and Johansson RS (2006) Control strategies in object manipulation tasks.Current opinion in neurobiology16(6): 650–659
Firoozi R, Tucker J, Tian S, Majumdar A, Sun J, Liu W, Zhu Y , Song S, Kapoor A, Hausman K, Ichter B, Driess D, Wu J, Lu C and Schwager M (2025) Foundation models in robotics: Applications, challenges, and the future.The International Journal of Robotics Research44(5): 701–739. Flanagan JR, Bowman MC and Johansson RS (2006) Control strategies in object ma...
2025
-
[6]
In:2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Ghazi-Zahedi K, Deimel R, Mont ´ufar G, Wall V and Brock O (2017) Morphological computation: the good, the bad, and the ugly. In:2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, pp. 464–469. Goertz RC (1952) Fundamentals of general-purpose remote manipulators.Nucleonics: 36–42. Hadjiosif AM and Smith MA (2015) Flexibl...
Pith/arXiv arXiv 2017
-
[7]
Kostrikov I, Nair A and Levine S (2021) Offline reinforcement learning with implicit q-learning
Kitano H (2004) Biological robustness.Nature Reviews Genetics 5(11): 826–837. Kostrikov I, Nair A and Levine S (2021) Offline reinforcement learning with implicit q-learning. In:International Conference on Learning Representations. Koval MC, Pollard NS and Srinivasa SS (2016) Pre-and post- contact policy decomposition for planar contact manipulation under...
arXiv 2004
-
[8]
Kumar A, Zhou A, Tucker G and Levine S (2020) Conservative q- learning for offline reinforcement learning.Advances in neural information processing systems33: 1179–1191. Laskey M, Lee J, Fox R, Dragan A and Goldberg K (2017) Dart: Noise injection for robust imitation learning. In:Conference on robot learning. PMLR, pp. 143–156. LeCun Y , Bottou L, Bengio ...
Pith/arXiv arXiv 2020
-
[9]
Lozano-Perez T, Mason MT and Taylor RH (1984) Automatic synthesis of fine-motion strategies for robots.The International Journal of Robotics Research3(1): 3–24. Lu H, Dong Y , Weng Z, Pokorny F, Lundell J and Kragic D (2025) Grasping a handful: Sequential multi-object dexterous grasp generation.IEEE Robotics and Automation Letters. Luo J, Hu Z, Xu C, Tan ...
arXiv 1984
-
[10]
IEEE, pp. 544–548. Mason MT (2007) Compliance and force control for computer controlled manipulators.IEEE Transactions on Systems, Man, and Cybernetics11(6): 418–432. Mason MT (2012) Creation myths: The beginnings of robotics research.IEEE robotics & automation magazine19(2): 72–77. Mason MT (2018) Toward robotic manipulation.Annual Review of Control, Rob...
2007
-
[11]
In:Conference on Robot Learning
Mishra UA, Xue S, Chen Y and Xu D (2023) Generative skill chaining: Long-horizon skill planning with diffusion models. In:Conference on Robot Learning. PMLR, pp. 2905–2925. Moos J, Hansel K, Abdulsamad H, Stark S, Clever D and Peters J (2022) Robust reinforcement learning: A review of foundations and recent advances.Machine Learning and Knowledge Extracti...
arXiv 2023
-
[12]
Open X-Embodiment Collaboration (2024) Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration
2024
-
[13]
In:2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, pp. 6892–6903. OpenAI, Akkaya I, Andrychowicz M, Chociej M, Litwin M, McGrew B, Petron A, Paino A, Plappert M, Powell G, Ribas R, Schneider J, Tezak N, Tworek J, Welinder P, Weng L, Yuan Q, Zaremba W and Zhang L (2019) Solving rubik’s cube with Prepared usingsagej.cls 22 Journa...
Pith/arXiv arXiv 2024
-
[14]
Sankar S, Cheng WY , Zhang J, Slepyan A, Iskarous MM, Greene RJ, DeBrabander R, Chen J, Gupta A and Thakor NV (2025) A natural biomimetic prosthetic hand with neuromorphic tactile sensing for precise and compliant grasping.Science Advances 11(10): eadr9300. Shi F, Zhang C, Miki T, Lee J, Hutter M and Coros S (2024) Rethinking robustness assessment: Advers...
arXiv 2025
-
[15]
Prepared usingsagej.cls Dong et al. 23 Takano R, Oyama H and Yamakita M (2021) Continuous optimization-based task and motion planning with signal temporal logic specifications for sequential manipulation. In:2021 IEEE international conference on robotics and automation (ICRA). IEEE, pp. 8409–8415. Tao S, Xiang F, Shukla A, Qin Y , Hinrichsen X, Yuan X, Ba...
arXiv 2021
-
[16]
In:2017 IEEE/RSJ international conference on intelligent robots and systems (IROS)
Tobin J, Fong R, Ray A, Schneider J, Zaremba W and Abbeel P (2017) Domain randomization for transferring deep neural networks from simulation to the real world. In:2017 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, pp. 23–30. TRI LBM Team, Barreiros J, Beaulieu A, Bhat A, Cory R, Cousineau E, Dai H, Fang CH, Hashimoto K...
2017
-
[17]
IEEE, pp. 514–520. Yu T, Xiao T, Stone A, Tompson J, Brohan A, Wang S, Singh J, Tan C, M D, Peralta J, Ichter B, Hausman K and Xia F (2023) Scaling robot learning with semantically imagined experience. Robotics: Science and Systems. Zahid M and Pokorny FT (2024) Cloudgripper: An open source cloud robotics testbed for robotic manipulation research, benchma...
Pith/arXiv arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.