ManiSoft: Towards Vision-Language Manipulation for Soft Continuum Robotics
Pith reviewed 2026-05-20 09:50 UTC · model grok-4.3
The pith
ManiSoft introduces a benchmark for vision-language manipulation using soft continuum robotic arms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
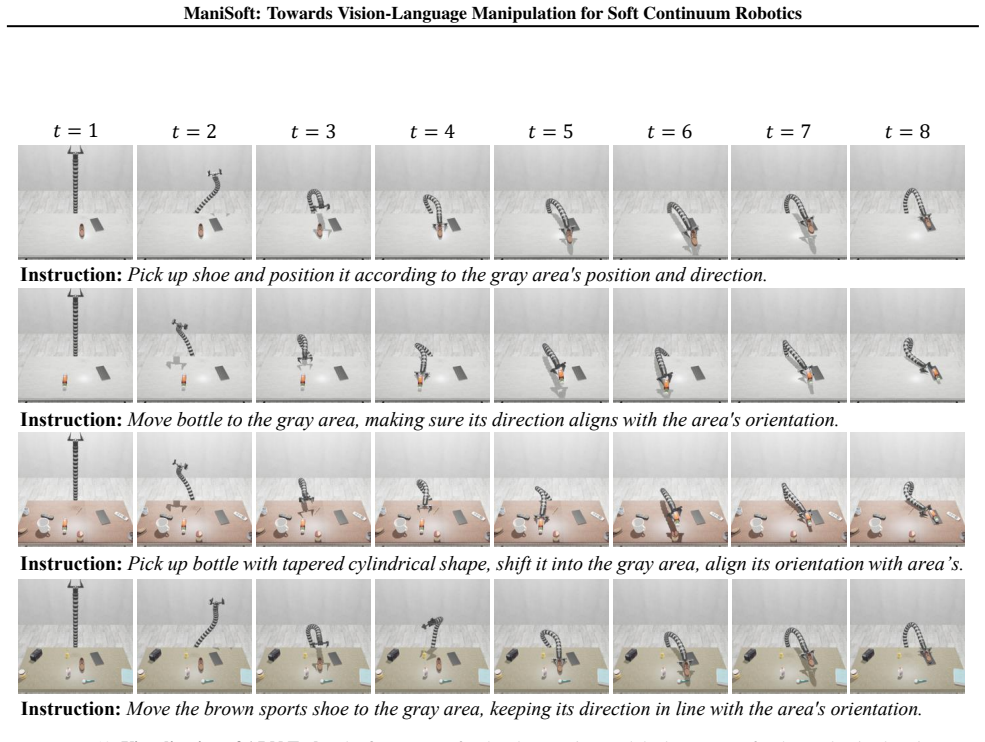
ManiSoft is a benchmark for vision-language manipulation for soft continuum robotics. It features a tailored simulator that couples realistic soft-body dynamics with contact-rich interactions via an elastic force constraint. On this basis, ManiSoft defines four tasks, each highlighting distinct aspects of deformable control, from basic end-effector coordination to obstacle avoidance. To support policy training and evaluation, ManiSoft includes an automated pipeline that generates 6,300 diverse scenes and corresponding expert trajectories. To produce high-quality trajectories at scale, a high-level planner decomposes each task into a sequence of waypoints, followed by a low-level RL policy to
What carries the argument
The tailored simulator that couples realistic soft-body dynamics with contact-rich interactions via an elastic force constraint, together with the high-level planner and low-level RL policy for expert trajectory generation.
If this is right
- The four tasks allow systematic testing of basic coordination through advanced obstacle avoidance in deformable systems.
- The pipeline for generating 6,300 scenes and trajectories supports scalable training and evaluation of vision-language policies.
- Benchmark results identify concrete failure modes in visual proprioception and deformability exploitation that new methods must solve.
- ManiSoft can function as a shared testbed that transfers techniques from rigid-arm research to soft-arm settings.
Where Pith is reading between the lines
- Better vision models focused on estimating continuous arm shape could narrow the performance gap seen under randomization.
- Policies that explicitly plan bending sequences around obstacles might make fuller use of soft-arm deformability.
- Transferring ManiSoft-trained policies to hardware soft robots would test whether the elastic-force simulator captures real dynamics.
- The benchmark could extend to other soft-robot domains such as navigation or inspection in tight environments.
Load-bearing premise
The tailored simulator accurately couples realistic soft-body dynamics with contact-rich interactions via an elastic force constraint, and the high-level planner plus low-level RL policy produces high-quality expert trajectories suitable for policy training and evaluation.
What would settle it
If policies trained on ManiSoft trajectories show no performance advantage over rigid-arm methods when tested on physical soft robots in confined spaces, the benchmark would fail to demonstrate a useful bridge between the two domains.
Figures












read the original abstract
Most existing vision-language manipulation research targets rigid robotic arms, whose fixed morphology limits adaptability in cluttered or confined spaces. Soft robotic arms offer an appealing alternative due to their deformability, but confront challenges such as unreliable proprioception and distributed low-level actuation. To investigate these challenges, we introduce \ManiSoft, a benchmark for vision-language manipulation with soft arms. ManiSoft features a tailored simulator that couples realistic soft-body dynamics with contact-rich interactions via an elastic force constraint. On this basis, ManiSoft defines four tasks, each highlighting distinct aspects of deformable control, from basic end-effector coordination to obstacle avoidance. To support policy training and evaluation, \ManiSoft{} includes an automated pipeline that generates $6{,}300$ diverse scenes and corresponding expert trajectories. To produce high-quality trajectories at scale, we first employ a high-level planner to decompose each task into a sequence of waypoints, followed by a low-level reinforcement learning policy that generates torque commands to track waypoints. Benchmarking three representative policy models shows relatively promising results in clean scenes but substantial performance drop under randomization. Visualization analysis indicates that failures stem primarily from inaccurate visual estimation of proprioceptive state and limited exploitation of deformability for adaptive obstacle avoiding. We anticipate ManiSoft to serve as a valuable testbed, bridging the gap between rigid and soft arms in the context of vision-language manipulation. Out codes and datasets are released at https://buaa-colalab.github.io/ManiSoft.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces ManiSoft, a benchmark for vision-language manipulation with soft continuum robotic arms. It features a tailored simulator coupling soft-body dynamics and contact-rich interactions via an elastic force constraint, defines four tasks highlighting deformable control aspects, generates 6300 diverse scenes with expert trajectories via a high-level planner followed by low-level RL policy for torque commands, and benchmarks three representative policy models that show promising results in clean scenes but substantial performance drops under randomization, with failures attributed primarily to inaccurate visual proprioception and limited exploitation of deformability.
Significance. If the simulator's dynamics prove representative of real soft continuum robots, ManiSoft could serve as a useful testbed bridging rigid and soft arm research in vision-language manipulation. The automated pipeline for scene and trajectory generation at scale, along with released code and datasets, supports reproducibility and community use. The empirical focus on challenges like unreliable proprioception and distributed actuation in soft arms addresses a genuine gap, though the absence of detailed quantitative validation metrics limits immediate impact assessment.
major comments (3)
- [Simulator section] Simulator description (likely §3 or equivalent): the claim that the tailored simulator 'couples realistic soft-body dynamics with contact-rich interactions via an elastic force constraint' lacks quantitative validation against Cosserat rod models, finite-element references, or physical soft-arm data for metrics such as tip position error, curvature profiles, or force under distributed actuation; this is load-bearing for the central claim that ManiSoft is a representative testbed.
- [Benchmarking results] Benchmarking and results section: the reported 'substantial performance drop under randomization' and attribution to 'inaccurate visual estimation of proprioceptive state' are presented without supporting data tables, ablation studies, or error analysis (e.g., success rates, proprioception error distributions), undermining assessment of whether the drop reflects soft-robot challenges or simulator limitations.
- [Expert trajectory generation] Trajectory generation pipeline: the high-level planner plus low-level RL policy is asserted to produce 'high-quality expert trajectories' suitable for policy training, but no quantitative metrics on waypoint tracking accuracy, trajectory smoothness, or success rates across the 6300 scenes are provided to substantiate this for downstream evaluation.
minor comments (2)
- [Abstract] Abstract: 'Out codes and datasets' should be corrected to 'Our codes and datasets'.
- [Figures and notation] Notation and figures: ensure consistent use of task names and that visualizations of failure cases clearly label proprioception errors versus deformability exploitation.
Simulated Author's Rebuttal
We thank the referee for their thoughtful and constructive comments. We address each major comment point by point below, indicating the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Simulator section] Simulator description (likely §3 or equivalent): the claim that the tailored simulator 'couples realistic soft-body dynamics with contact-rich interactions via an elastic force constraint' lacks quantitative validation against Cosserat rod models, finite-element references, or physical soft-arm data for metrics such as tip position error, curvature profiles, or force under distributed actuation; this is load-bearing for the central claim that ManiSoft is a representative testbed.
Authors: We agree that quantitative validation would strengthen the simulator's credibility as a representative testbed. In the revised manuscript, we will add a dedicated subsection with direct comparisons to Cosserat rod models and finite-element simulations, reporting metrics such as tip position error and curvature profiles under distributed actuation. For physical soft-arm data, our work is currently simulation-focused; we will explicitly note this scope limitation and discuss it as an avenue for future validation. revision: yes
-
Referee: [Benchmarking results] Benchmarking and results section: the reported 'substantial performance drop under randomization' and attribution to 'inaccurate visual estimation of proprioceptive state' are presented without supporting data tables, ablation studies, or error analysis (e.g., success rates, proprioception error distributions), undermining assessment of whether the drop reflects soft-robot challenges or simulator limitations.
Authors: We acknowledge that additional empirical support is needed to clarify the sources of performance drops. We will incorporate new tables reporting success rates in clean versus randomized scenes, proprioception error distributions, and ablation studies isolating the contributions of visual estimation inaccuracies and randomization effects in the revised results section. revision: yes
-
Referee: [Expert trajectory generation] Trajectory generation pipeline: the high-level planner plus low-level RL policy is asserted to produce 'high-quality expert trajectories' suitable for policy training, but no quantitative metrics on waypoint tracking accuracy, trajectory smoothness, or success rates across the 6300 scenes are provided to substantiate this for downstream evaluation.
Authors: We will expand the trajectory generation section to include quantitative metrics, specifically average waypoint tracking error, trajectory smoothness measures (such as integrated jerk), and overall success rates of the expert policy across all 6300 scenes. These additions will be placed in the main text or supplementary material to better substantiate trajectory quality. revision: yes
Circularity Check
Empirical benchmark introduction with no derivation chain
full rationale
The paper introduces ManiSoft as an empirical benchmark for vision-language manipulation on soft continuum robots. It describes a tailored simulator, four tasks, and an automated pipeline that generates scenes and expert trajectories using a high-level planner followed by low-level RL. No mathematical derivations, first-principles predictions, or equations are present that could reduce by construction to fitted inputs or self-referential definitions. Claims rest on the described methodology and released code/data rather than any load-bearing self-citation chain or ansatz smuggling. This is a standard empirical contribution whose central value (the benchmark itself) does not rely on circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
doi:10.48550/arxiv.2010.04296 , arxivId =
Ahmed, O., Tr ¨auble, F., Goyal, A., Neitz, A., Ben- gio, Y ., Sch ¨olkopf, B., W ¨uthrich, M., and Bauer, S. Causalworld: A robotic manipulation benchmark for causal structure and transfer learning.arXiv preprint arXiv:2010.04296,
-
[2]
Amin, A., Aniceto, R., Balakrishna, A., Black, K., Conley, K., Connors, G., Darpinian, J., Dhabalia, K., DiCarlo, J., et al.π ∗ 0.6: a vla that learns from experience.arXiv preprint arXiv:2511.14759,
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
Chen, T., Chen, Z., Chen, B., Cai, Z., Liu, Y ., Li, Z., Liang, Q., Lin, X., Ge, Y ., Gu, Z., et al. Robotwin 2.0: A scal- able data generator and benchmark with strong domain randomization for robust bimanual robotic manipulation. arXiv preprint arXiv:2506.18088, 2025a. Chen, Z., Wu, D., Guan, Q., Hardman, D., Renda, F., Hughes, J., Thuruthel, T. G., Del...
work page internal anchor Pith review Pith/arXiv arXiv
-
[4]
Geng, H., Wang, F., Wei, S., Li, Y ., Wang, B., An, B., Cheng, C. T., Lou, H., Li, P., Wang, Y .-J., Liang, Y ., Goetting, D., Xu, C., Chen, H., Qian, Y ., Geng, Y ., Mao, J., Wan, W., Zhang, M., Lyu, J., Zhao, S., Zhang, J., Zhang, J., Zhao, C., Lu, H., Ding, Y ., Gong, R., Wang, Y ., Kuang, Y ., Wu, R., Jia, B., Sferrazza, C., Dong, H., Huang, S., Wang,...
-
[5]
Li, Q., Liang, Y ., Wang, Z., Luo, L., Chen, X., Liao, M., Wei, F., Deng, Y ., Xu, S., Zhang, Y ., Wang, X., Liu, B., Fu, J., Bao, J., Chen, D., Shi, Y ., Yang, J., and Guo, B. Cogact: A foundational vision-language-action model for synergizing cognition and action in robotic manip- ulation.arXiv preprint arXiv:2411.19650, 2024a. Li, X., Hsu, K., Gu, J., ...
work page internal anchor Pith review Pith/arXiv arXiv
-
[6]
Large VLM-based Vision-Language-Action Models for Robotic Manipulation: A Survey
Shao, R., Li, W., Zhang, L., Zhang, R., Liu, Z., Chen, R., and Nie, L. Large vlm-based vision-language-action models for robotic manipulation: A survey.arXiv preprint arXiv:2508.13073,
work page internal anchor Pith review Pith/arXiv arXiv
-
[7]
Meta-World: A Bench- mark and Evaluation for Multi-Task and Meta Reinforcement Learning, June 2021
URLhttps: //arxiv.org/abs/1910.10897. Zhao, Z., Wu, Q., Wang, J., Zhang, B., Zhong, C., and Zhilenkov, A. A. Exploring embodied intelligence in soft robotics: a review.Biomimetics, 9(4):248,
-
[8]
12 ManiSoft: Towards Vision-Language Manipulation for Soft Continuum Robotics Supplementary Material A. Cosserat Rod Theory In Cosserat Rod Theory (Cosserat & Cosserat, 1909), the elastic rod withL 0 and radiusr 0 is presented as a Cosserat rod composed ofNdiscrete element rods, each of lengthL 0/Nand radiusr
work page 1909
-
[9]
In theManiSoftbenchmark, we set the maximum execution horizon toT= 1500steps. C. Details for Executor Training For training the executor, we adopt an MLP-based policy network and employ SAC (Haarnoja et al., 2018), for reinforce- ment learning. We use a learning rate of3×10 −4 and a batch size of256. The model is trained using a total of160M samples. We p...
work page 2018
-
[10]
across various parameter settings. A case is deemed successful once the pose difference between the end-effector and the target drops below a predefined threshold. In Elastica-RL-Control (Naughton et al., 2021), the parameters are set ask1 = 0.5,k 2 = 1.5,d 1 = 0.1, andd 2 = 0.05. We adopt the same values fork 1 andk
work page 2021
-
[11]
Based on the model with the highest success rate, we addRs and perform post-training on80M samples
The best performance was achieved withα= 0.2. Based on the model with the highest success rate, we addRs and perform post-training on80M samples. We then compare the stability performance under different parameter settings, as shown in Table 1 of the main text. Fig. 10 shows the visualization of the trained executor controlling the soft robotic arm to mov...
work page 2025
-
[12]
ACC(%) #Steps ACC(%) #Steps ACC(%) #Steps ACC(%) #Steps ACC(%) #Steps ACC(%) #Steps Bottle70.0543 15.044450.0 530 5.0 749 0.0 -45.0 569 Pill Bottle75.0545 10.042055.0 520 10.0 349 5.0113 40.0599 Can100.0 53535.0 550 60.0 597 10.05150.0 -45.0663 Cup65.0502 15.044260.0 529 5.0 603 5.0516 30.0591 Sand Clock35.0538 15.0 58835.0 4730.0 - 0.0 -15.0 454 Shoe35.0...
- [13]
-
[14]
2.53712.52780.0 - 1.7324 RDT (Liu et al., 2025b) 0.0 - 7.5 498 5.02604.2 379 OpenVLA-OFT (Kim et al., 2025)5.055920.043055.048026.7489 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑡 = 1 𝑡 = 2 𝑡 = 3 𝑡 = 4 𝑡 = 5 𝑡 = 6 Figure 10.Visualization of the trained executor controlling the soft robotic arm to move to the target pose. 16 Ma...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.