REVIEW 2 major objections 2 minor 1 cited by
Disentangling content from structure allows latent action models to learn abstract actions from video without sacrificing generation quality.
Reviewed by Pith at T0; open to challenge. T0 means a machine referee read the full paper against a public rubric. the ladder, T0–T4 →
T0 review · grok-4.3
2026-05-20 19:31 UTC pith:OCIPKZMR
load-bearing objection DiLA's idea of letting the predictive bottleneck drive a natural content-structure split in latent action models is distinct but rests on an assumption that needs explicit ablations to hold up. the 2 major comments →
DiLA: Disentangled Latent Action World Models
The pith
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DiLA introduces a disentangled latent action world model where content and structure are separated in the latent space. The predictive bottleneck of learning actions between frames drives the model to encode spatial layouts in the structure pathway and visual details in the content pathway. This results in a continuous, semantically structured latent action space that supports high-quality generation without the usual compromises.
What carries the argument
Content-structure disentanglement, a mechanism where the model automatically separates spatial layout information into one latent pathway and visual appearance details into another, driven by the requirements of latent action prediction.
Load-bearing premise
That the predictive pressure from learning latent actions will automatically lead to a clean separation of structure and content without needing additional loss terms or supervision.
What would settle it
Observing that the latent representations do not show clear separation between motion patterns and appearance when the model is trained on videos where backgrounds change independently of actions, indicating failure of the disentanglement.
If this is right
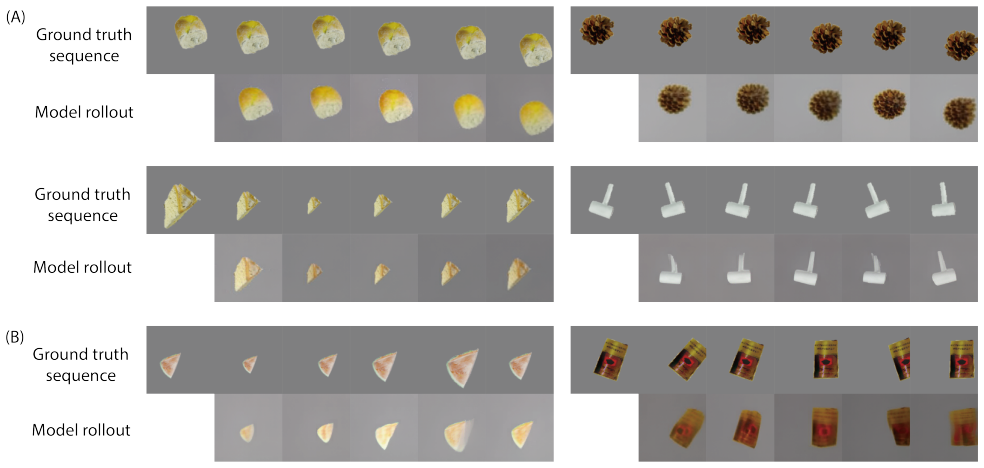
- Superior performance in generating future video frames from inferred actions.
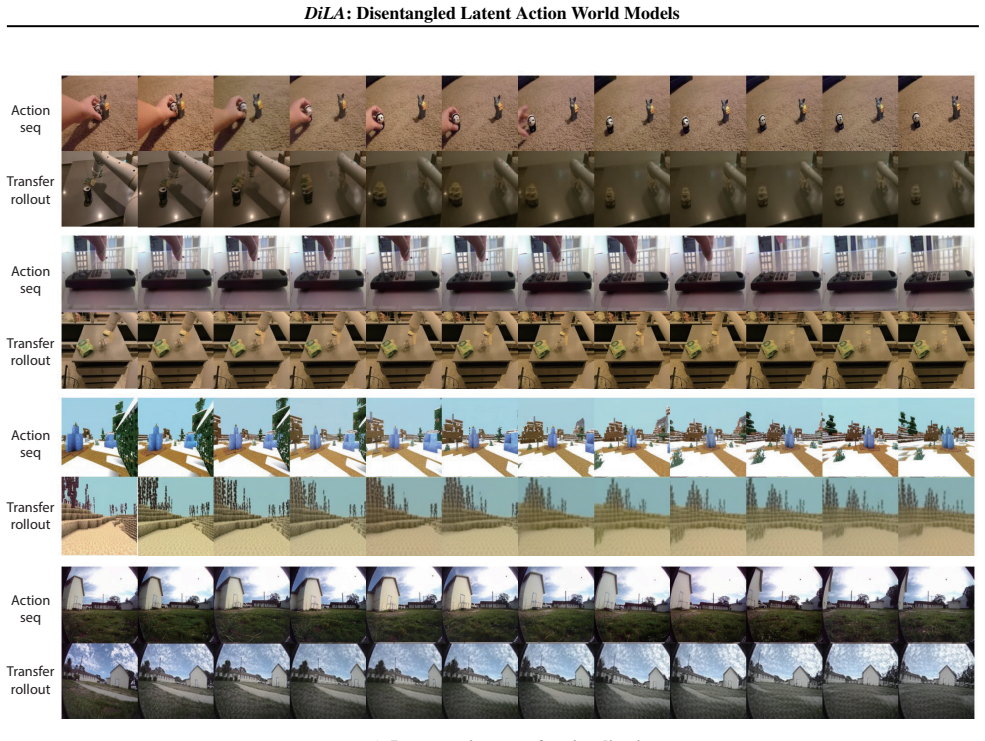
- Effective transfer of actions across different video scenes.
- Improved capabilities for visual planning tasks using the abstract actions.
- Greater interpretability of the learned action manifold.
Where Pith is reading between the lines
- Such disentanglement could be applied to other self-supervised learning tasks involving sequential data like audio sequences.
- Testing on datasets with controlled variations in motion and appearance would confirm if the structure pathway indeed isolates motion independently.
- Integration with reinforcement learning agents might allow planning at higher levels of abstraction using these latent actions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces DiLA, a Disentangled Latent Action world model that learns from unlabeled video by inferring abstract actions between frames. It claims to resolve the trade-off between action abstraction and generation fidelity through content-structure disentanglement, where the predictive bottleneck in latent action learning drives the model to route spatial layouts to a structure pathway and visual details to a content pathway. This is asserted to yield a continuous, semantically structured latent action space without compromising generative quality, with superior results reported in video generation, action transfer, visual planning, and manifold interpretability.
Significance. If the central claims hold and the disentanglement is shown to be driven by the predictive bottleneck rather than architectural choices, DiLA would offer a meaningful advance in self-supervised world model learning by providing a unified single-stage approach that achieves both high-level action abstraction and high-fidelity generation, with potential benefits for video synthesis and planning applications.
major comments (2)
- [§3.2] §3.2 (Method): The claim that the predictive bottleneck 'compels the model to distill spatial layouts into the structure pathway while offloading visual details to a separate content pathway' is presented as an emergent property, but the manuscript provides no ablations that isolate the bottleneck's causal contribution from the effects of separate pathways, independent losses, network capacity, or initialization biases. This leaves open the possibility that observed separation arises from architectural design rather than the information bottleneck, directly affecting the 'without compromising generative quality' guarantee.
- [§5] §5 (Experiments): The abstract and results sections assert superior performance in generation quality, action transfer, and planning, yet the reported comparisons lack sufficient detail on baseline implementations, exact metric values, or statistical significance testing to substantiate the superiority claims over two-stage LAMs or optical-flow-limited methods.
minor comments (2)
- [Figure 3] Figure 3: The visualization of the latent action manifold would benefit from explicit labeling of the semantic dimensions (e.g., direction, speed) to strengthen the interpretability claims.
- [§3.1] Notation in §3.1: The distinction between content latent z_c and structure latent z_s is introduced without a clear equation defining their joint distribution or reconstruction objective, which could be clarified for reproducibility.
Simulated Author's Rebuttal
We are grateful to the referee for the positive assessment of the potential impact of DiLA and for the constructive suggestions to strengthen the manuscript. We address the major comments point-by-point below and will make the necessary revisions to clarify the causal role of the predictive bottleneck and enhance the experimental details.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Method): The claim that the predictive bottleneck 'compels the model to distill spatial layouts into the structure pathway while offloading visual details to a separate content pathway' is presented as an emergent property, but the manuscript provides no ablations that isolate the bottleneck's causal contribution from the effects of separate pathways, independent losses, network capacity, or initialization biases. This leaves open the possibility that observed separation arises from architectural design rather than the information bottleneck, directly affecting the 'without compromising generative quality' guarantee.
Authors: We appreciate this insightful comment. The manuscript argues that the predictive bottleneck drives the disentanglement based on the information-theoretic principle that limited capacity forces the model to prioritize compressible spatial structures in one pathway and detailed content in another. However, we agree that explicit ablations are necessary to rule out architectural confounds. In the revision, we will include new experiments: (1) a version without the bottleneck (full latent action capacity) to show reduced disentanglement, and (2) varying bottleneck sizes. These will be added to §3.2 and the experiments section. This supports our claim that the bottleneck is crucial for the observed separation without compromising quality, as the content pathway handles details. revision: yes
-
Referee: [§5] §5 (Experiments): The abstract and results sections assert superior performance in generation quality, action transfer, and planning, yet the reported comparisons lack sufficient detail on baseline implementations, exact metric values, or statistical significance testing to substantiate the superiority claims over two-stage LAMs or optical-flow-limited methods.
Authors: We thank the referee for highlighting the need for more rigorous reporting. We will revise §5 to include: detailed descriptions of how baselines were implemented and trained, a table listing exact numerical values for all metrics (e.g., FID, PSNR, etc.), and results of statistical tests (e.g., p-values from t-tests over 5 random seeds). This will substantiate the superiority claims. revision: yes
Circularity Check
No circularity: disentanglement presented as emergent outcome of bottleneck, not definitional or fitted input
full rationale
The paper's derivation chain rests on the claim that the predictive bottleneck from latent-action prediction (inferring actions to reconstruct future frames) compels content-structure separation as a co-evolving process. This is framed as an empirical consequence of the architecture and objective rather than a self-definitional equivalence (e.g., no equation defines the structure pathway in terms of the target disentanglement). No fitted parameters are renamed as predictions, no self-citations supply load-bearing uniqueness theorems, and no ansatz is smuggled via prior work. The abstract and described results treat the separation and high-fidelity generation as jointly validated outcomes, keeping the central argument self-contained against external benchmarks such as video generation quality and action transfer.
Axiom & Free-Parameter Ledger
read the original abstract
Latent Action Models (LAMs) enable the learning of world models from unlabeled video by inferring abstract actions between consecutive frames. However, LAMs face a fundamental trade-off between action abstraction and generation fidelity. Existing methods typically circumvent this issue by using two-stage training with pre-trained world models or by limiting predictions to optical flow. In this paper, we introduce DiLA, a novel Disentangled Latent Action world model that aims to resolve this trade-off via content-structure disentanglement. Our key insight is that disentanglement and latent action learning are co-evolving: the predictive bottleneck inherent in latent action learning serves as a driving force for disentanglement, compelling the model to distill spatial layouts into the structure pathway while offloading visual details to a separate content pathway for generation. This synergy yields a continuous, semantically structured latent action space without compromising generative quality. DiLA achieves superior results in video generation quality, action transfer, visual planning, and manifold interpretability. These findings establish DiLA as a unified framework that simultaneously achieves high-level action abstraction and high-fidelity generation, advancing the frontier of self-supervised world model learning.
Figures








Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the predictive bottleneck inherent in latent action learning serves as a driving force for disentanglement, compelling the model to distill spatial layouts into the structure pathway while offloading visual details to a separate content pathway
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
DiLA jointly learns abstract latent actions and content-structure disentanglement
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
PhiZero: A World Model Built Around Physical Language
A self-supervised discrete physical-language bottleneck plus a VLM reasoner lets a world model predict state transitions before rendering video, improving physical coherence and enabling zero-shot motion transfer.
Reference graph
Works this paper leans on
-
[1]
V-JEPA 2: Self-Supervised Video Models Enable Understanding, Prediction and Planning
Assran, M., Bardes, A., Fan, D., Garrido, Q., Howes, R., Muckley, M., Rizvi, A., Roberts, C., Sinha, K., Zholus, A., et al. V-jepa 2: Self-supervised video models enable understanding, prediction and planning.arXiv preprint arXiv:2506.09985,
work page internal anchor Pith review Pith/arXiv arXiv
-
[2]
Motus: A Unified Latent Action World Model
Bi, H., Tan, H., Xie, S., Wang, Z., Huang, S., Liu, H., Zhao, R., Feng, Y ., Xiang, C., Rong, Y ., et al. Mo- tus: A unified latent action world model.arXiv preprint arXiv:2512.13030,
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
RT-1: Robotics Transformer for Real-World Control at Scale
Brohan, A., Brown, N., Carbajal, J., Chebotar, Y ., Dabis, J., Finn, C., Gopalakrishnan, K., Hausman, K., Herzog, A., Hsu, J., et al. Rt-1: Robotics transformer for real-world control at scale.arXiv preprint arXiv:2212.06817,
work page internal anchor Pith review Pith/arXiv arXiv
-
[4]
UniVLA: Learning to Act Anywhere with Task-centric Latent Actions
Bu, Q., Yang, Y ., Cai, J., Gao, S., Ren, G., Yao, M., Luo, P., and Li, H. Univla: Learning to act anywhere with task- centric latent actions.arXiv preprint arXiv:2505.06111,
work page internal anchor Pith review Pith/arXiv arXiv
-
[5]
Igor: Image-goal representations are the atomic control units for foundation models in embodied ai,
Chen, X., Guo, J., He, T., Zhang, C., Zhang, P., Yang, D. C., Zhao, L., and Bian, J. Igor: Image-goal representations are the atomic control units for foundation models in embodied ai.arXiv preprint arXiv:2411.00785, 2024a. Chen, X., Wei, H., Zhang, P., Zhang, C., Wang, K., Guo, Y ., Yang, R., Wang, Y ., Xiao, X., Zhao, L., Chen, J., and Bian, J. Villa-X:...
-
[6]
Learning skills from action-free videos
Fang, H.-C., Hung, K.-H., Chen, C.-R., Chou, P.-J., Yang, C.-K., Ko, P.-C., Wang, Y .-C., Wu, Y .-H., Chen, M.-H., and Sun, S.-H. Learning skills from action-free videos. arXiv preprint arXiv:2512.20052,
-
[7]
Garrido, Q., Nagarajan, T., Terver, B., Ballas, N., LeCun, Y ., and Rabbat, M. Learning latent action world models in the wild.arXiv preprint arXiv:2601.05230,
-
[9]
The "something something" video database for learning and evaluating visual common sense
URL http://arxiv. org/abs/1706.04261. Gu, A. and Dao, T. Mamba: Linear-time sequence mod- eling with selective state spaces. InFirst conference on language modeling,
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
arXiv preprint arXiv:1910.11956 , year=
10 DiLA: Disentangled Latent Action World Models Gupta, A., Kumar, V ., Lynch, C., Levine, S., and Hausman, K. Relay policy learning: Solving long-horizon tasks via imitation and reinforcement learning.arXiv preprint arXiv:1910.11956,
-
[11]
doi: 10.5281/zenodo.1207631. Hafner, D., Lillicrap, T., Ba, J., and Norouzi, M. Dream to control: Learning behaviors by latent imagination,
-
[12]
Dream to Control: Learning Behaviors by Latent Imagination
URLhttps://arxiv.org/abs/1912.01603. Hafner, D., Pasukonis, J., Ba, J., and Lillicrap, T. Mastering Diverse Domains through World Models, April
work page internal anchor Pith review Pith/arXiv arXiv 1912
- [13]
-
[14]
Pre-trained video generative models as world simulators.CoRR, abs/2502.07825, February 2025
He, H., Zhang, Y ., Lin, L., Xu, Z., and Pan, L. Pre-trained video generative models as world simulators.arXiv preprint arXiv:2502.07825,
-
[15]
arXiv preprint arXiv:2505.08787 , year=
Kim, H., Kang, J., Kang, H., Cho, M., Kim, S. J., and Lee, Y . Uniskill: Imitating human videos via cross-embodiment skill representations.arXiv preprint arXiv:2505.08787,
-
[16]
Kingma, D. P. and Welling, M. Auto-encoding variational bayes.arXiv preprint arXiv:1312.6114,
work page internal anchor Pith review Pith/arXiv arXiv
-
[17]
Koyama, M., Fukumizu, K., Hayashi, K., and Miyato, T. Neural fourier transform: A general approach to equivariant representation learning.arXiv preprint arXiv:2305.18484,
-
[18]
LoopNav: Benchmarking Spatial Consistency in World Models
URL https://arxiv.org/abs/ 2505.22976. Liang, A., Czempin, P., Hong, M., Zhou, Y ., Biyik, E., and Tu, S. CLAM: Continuous Latent Action Models for Robot Learning from Unlabeled Demonstrations, May
work page internal anchor Pith review Pith/arXiv arXiv
-
[19]
StaMo: Unsupervised Learning of Generalizable Robot Motion from Compact State Representation
Liu, M., Shu, J., Chen, H., Li, Z., Zhao, C., Yang, J., Gao, S., Chen, H., and Shen, C. Stamo: Unsupervised learn- ing of generalizable robot motion from compact state representation.arXiv preprint arXiv:2510.05057,
work page internal anchor Pith review Pith/arXiv arXiv
-
[20]
UMAP: Uniform Manifold Approximation and Projection for Dimension Reduction
McInnes, L., Healy, J., and Melville, J. Umap: Uniform manifold approximation and projection for dimension reduction.arXiv preprint arXiv:1802.03426,
work page internal anchor Pith review Pith/arXiv arXiv
-
[21]
Deep dynamics models for learning dexterous manipula- tion.arXiv preprint arXiv:1909.11652,
Nagabandi, A., Konoglie, K., Levine, S., and Kumar, V . Deep dynamics models for learning dexterous manipula- tion.arXiv preprint arXiv:1909.11652,
-
[22]
DINOv2: Learning Robust Visual Features without Supervision
URL https://arxiv.org/abs/2304.07193. Peebles, W. and Xie, S. Scalable diffusion models with transformers. InProceedings of the IEEE/CVF interna- tional conference on computer vision, pp. 4195–4205,
work page internal anchor Pith review Pith/arXiv arXiv
-
[23]
Reed, S., Zolna, K., Parisotto, E., Colmenarejo, S. G., Novikov, A., Barth-Maron, G., Gimenez, M., Sulsky, Y ., Kay, J., Springenberg, J. T., et al. A generalist agent. arXiv preprint arXiv:2205.06175,
work page internal anchor Pith review Pith/arXiv arXiv
-
[24]
arXiv preprint arXiv:2511.07732 (2025)
URL https://arxiv.org/abs/2511.07732. Schmidt, D. and Jiang, M. Learning to act without actions. InThe Twelfth International Conference on Learning Representations (ICLR),
-
[25]
arXiv preprint arXiv:2310.08584 , year=
Venkataramanan, S., Rizve, M. N., Carreira, J., Asano, Y . M., and Avrithis, Y . Is imagenet worth 1 video? learn- ing strong image encoders from 1 long unlabelled video. arXiv preprint arXiv:2310.08584,
-
[26]
Wang, Z., Wang, K., Zhao, L., Stone, P., and Bian, J. Dyn- o: Building structured world models with object-centric representations.arXiv preprint arXiv:2507.03298, 2025b. Williams, G., Drews, P., Goldfain, B., Rehg, J. M., and Theodorou, E. A. Aggressive driving with model predic- tive path integral control. In2016 IEEE international conference on robotic...
-
[27]
Wu, J., Ma, H., Deng, C., and Long, M. Pre-training con- textualized world models with in-the-wild videos for re- inforcement learning.Advances in Neural Information Processing Systems, 36:39719–39743, 2023a. Wu, T., Zhang, J., Fu, X., Wang, Y ., Ren, J., Pan, L., Wu, W., Yang, L., Wang, J., Qian, C., et al. Omniobject3d: Large-vocabulary 3d object datase...
-
[28]
Latent Action Pretraining from Videos
Ye, S., Jang, J., Jeon, B., Joo, S., Yang, J., Peng, B., Mandlekar, A., Tan, R., Chao, Y .-W., Lin, B. Y ., et al. Latent action pretraining from videos.arXiv preprint arXiv:2410.11758,
work page internal anchor Pith review Pith/arXiv arXiv
-
[29]
Diffusion Transformers with Representation Autoencoders
Zheng, B., Ma, N., Tong, S., and Xie, S. Diffusion trans- formers with representation autoencoders.arXiv preprint arXiv:2510.11690,
work page internal anchor Pith review Pith/arXiv arXiv
-
[30]
formulation following LAPA (Ye et al., 2024). To maintain an information capacity comparable to our continuous baseline, we configure the VQ layer with a codebook size of 8 and a quantized embedding dimension of
work page 2024
-
[31]
With a patch size of 4 (resulting in a 4×4 token grid), this yields a total flattened latent dimension of dz = 4×4×32 = 512 . 14 DiLA: Disentangled Latent Action World Models This configuration ensures a fair comparison of representational bandwidth, allowing us to isolate the specific effects of discretization on latent actions and video generation quali...
work page 2025
-
[32]
Table 8.Model parameters across baselines. ParametersDiLALAPA MOTOADAWORLD(LAM) ADAWORLD VILLA-X Trainable123M 344M 440M 500M 1.5B 239M Frozen500M - - - - - B. Latent action analysis details B.1. Latent action analysis of single transformation type For each transformation type, we sample 4,000 unique objects. These objects are initialized at random locati...
work page 2024
-
[33]
We filter out “jump” and “pitch” actions due to their scarcity. The filtered data contains no composite actions, comprising 476 forward movements, 242 left turns, and 159 right turns. 15 DiLA: Disentangled Latent Action World Models C. Latent action linear probing details For each dataset, we sample 800 pairs of latent actions z and ground truth actions a...
work page 2025
-
[34]
Our implementation follows Nagabandi et al
to solve this optimization problem. Our implementation follows Nagabandi et al. (2019) as in VP2. At iteration i∈ {1, . . . , I} , we sample N candidate action sequences {µk i,t0:t0+H−1 }N k=1, evaluate their costs using the world model over planning horizonH, and compute a weighted average to derive the updated control sequencea i,t0:t0+H−1: ai,t0:t0+H−1...
work page 2019
-
[35]
focuses on autonomous ground navigation in unstructured outdoor environments (e.g., grassy fields, gravel, and hills). Unlike the discrete actions in LoopNav, RECON features continuous and compound actions that reflect real-world vehicle dynamics. Specifically, each action is parameterized as a 4-dimensional vector (∆x,∆y,∆yaw,∆pitch) , representing the i...
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.