Successive Convexification for Trajectory Optimization with Continuous-time Satisfaction of Signal Temporal Logic Specifications
Pith reviewed 2026-06-27 21:31 UTC · model grok-4.3
The pith
Generalized mean-based robustness lets successive convexification enforce continuous-time signal temporal logic on trajectories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
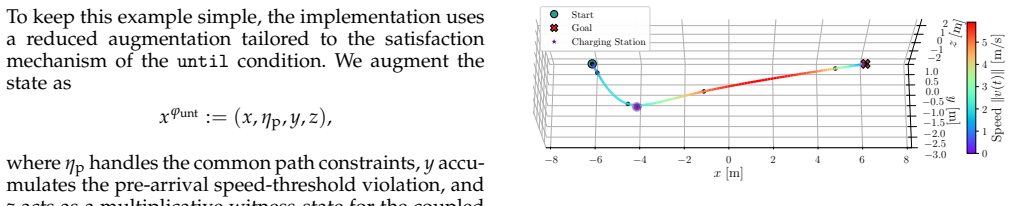
The central claim is that generalized mean-based robustness provides a smooth and exact parameterization of discrete-time signal temporal logic that can be lifted to continuous time by embedding the required temporal aggregation into augmented system dynamics; when combined with time dilation, multiple-shooting, and the prox-convex algorithm, the resulting nonconvex optimal-control problem can be solved reliably, yielding trajectories whose continuous-time paths satisfy the original signal temporal logic formulas up to the accuracy set by a user-chosen regularization parameter.
What carries the argument
Generalized mean-based robustness (GMSR) embedded into augmented continuous-time dynamics as the logical building block for differentiable CT-STL constraints.
If this is right
- The augmentation construction remains largely independent of the particular dynamics transcription or discretization scheme.
- Accuracy of the resulting CT-STL parameterization is controlled by a single user-selected regularization parameter.
- The GMSR-based constraints mitigate locality and gradient-masking behavior that appears with standard quantitative semantics.
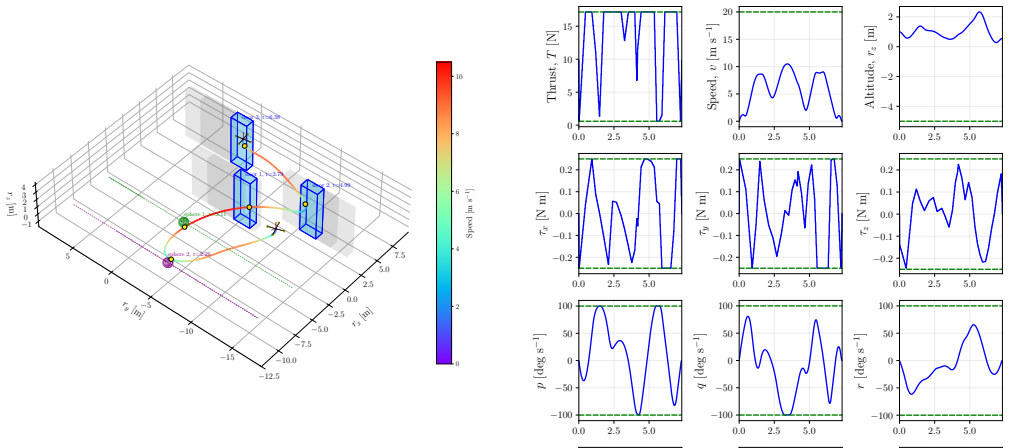
- The same framework applies to combined always, eventually, until, and implication specifications on both double-integrator and 6-DoF quadrotor models.
Where Pith is reading between the lines
- The regularization parameter creates an explicit accuracy-versus-smoothness dial that could be adapted online if computation time permits.
- Because the construction is described as transcription-independent, it may transfer to other optimal-control toolboxes with only local changes to the state vector.
- If the prox-convex solves remain fast, the method could support receding-horizon replanning under time-varying STL rules.
Load-bearing premise
Embedding temporal aggregation into augmented continuous-time dynamics via GMSR produces an optimization landscape in which the prox-convex method converges to trajectories that satisfy the original continuous-time STL specifications rather than only the smoothed surrogate.
What would settle it
An optimized trajectory that meets all GMSR-augmented constraints yet violates at least one original continuous-time STL formula when evaluated on the full continuous path would falsify the satisfaction guarantee.
Figures

read the original abstract
This paper presents a successive convexification framework for trajectory optimization under continuous-time Signal Temporal Logic (CT-STL) specifications. The framework employs generalized mean-based robustness (GMSR), a smooth and exact parameterization of discrete-time STL, as a logical building block for constructing differentiable CT-STL constraints in optimal control. It is integrated with time-dilation for free-final-time problems, finite-dimensional control parameterization, multiple-shooting discretization of the dynamics, and a convergence-guaranteed sequential convex programming method, prox-convex, to solve the nonconvex program. The main CT-STL realization embeds temporal aggregation into augmented continuous-time dynamics. This augmentation-based construction is largely transcription-independent, can be incorporated into existing optimal-control pipelines with minimal structural changes, and enables smooth CT-STL parameterizations with accuracy controlled by a user-selected regularization parameter. We also discuss a complementary dense-time realization that evaluates CT-STL formulas directly on the integration subnodes used for dynamics discretization, yielding a smooth and exact parameterization on the numerical trajectory representation, up to the accuracy of the integration scheme. The proposed GMSR-based formulations mitigate the locality and gradient-masking behavior of standard quantitative semantics and therefore provide a favorable landscape for gradient-based trajectory optimization. The framework is demonstrated through trajectory-optimization examples for a double-integrator system with continuous-time \always{}, \eventually{}, and \until{} specifications, and a 6-DoF quadrotor flight problem with combined \always{}, \implication{}, and \eventually{}-type specifications. The implementation is available at https://github.com/UW-ACL/TrajOpt_CT-STL.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper presents a successive convexification framework for trajectory optimization subject to continuous-time Signal Temporal Logic (CT-STL) specifications. It employs generalized mean-based robustness (GMSR) as a smooth parameterization of STL, embedding temporal aggregation into augmented continuous-time dynamics for differentiable constraints. The approach integrates time-dilation for free-final-time problems, finite-dimensional control parameterization, multiple-shooting discretization, and the prox-convex sequential convex programming solver. Complementary dense-time and augmentation-based realizations are discussed, with demonstrations on double-integrator systems (always, eventually, until) and a 6-DoF quadrotor (combined always, implication, eventually), and code released on GitHub.
Significance. If the central claims hold, the work provides a largely transcription-independent method to incorporate CT-STL into existing optimal-control pipelines while mitigating locality and gradient-masking issues of standard quantitative semantics. The reproducible implementation and concrete examples on standard benchmark systems strengthen its potential utility for robotics applications requiring temporal logic constraints.
major comments (2)
- [Abstract] Abstract: The central claim that the GMSR-augmented dynamics yield an 'exact' parameterization (up to integration accuracy) whose solutions satisfy the original continuous-time STL specifications rests on the regularization parameter controlling accuracy. No analysis is supplied showing that solutions of the regularized problem converge to exact satisfaction of the unsmoothed CT-STL semantics in the limit as the regularization parameter tends to zero, nor that prox-convex SCP on the surrogate avoids local minima that violate the original specification.
- [Abstract] Abstract and § on GMSR-based formulations: The assertion that the augmentation-based construction mitigates gradient-masking and provides a favorable landscape for gradient-based optimization is load-bearing for the framework's advantage over standard quantitative semantics, yet the manuscript provides no supporting error bounds, landscape analysis, or comparison of convergence rates to the original (non-surrogate) problem.
minor comments (1)
- The GitHub repository link is a positive feature for reproducibility; ensure the released code includes the exact regularization values and integration tolerances used in the reported quadrotor and double-integrator examples.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive comments on our manuscript. We address the major comments point by point below, acknowledging the points where the manuscript lacks supporting analysis and outlining planned revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the GMSR-augmented dynamics yield an 'exact' parameterization (up to integration accuracy) whose solutions satisfy the original continuous-time STL specifications rests on the regularization parameter controlling accuracy. No analysis is supplied showing that solutions of the regularized problem converge to exact satisfaction of the unsmoothed CT-STL semantics in the limit as the regularization parameter tends to zero, nor that prox-convex SCP on the surrogate avoids local minima that violate the original specification.
Authors: The referee correctly notes that the manuscript does not supply a formal analysis of convergence of the regularized solutions to the original CT-STL semantics as the regularization parameter approaches zero. The GMSR is presented as an exact smooth parameterization for discrete-time STL, with the continuous-time embedding relying on this property and the regularization for smoothness. The prox-convex SCP guarantees convergence to a stationary point of the surrogate problem, but not necessarily to a solution satisfying the unsmoothed specification. We will revise the abstract and the relevant sections to qualify the 'exact' claim as holding up to the regularization and integration accuracy, and add a discussion noting the lack of convergence guarantees to the original semantics as an open question. revision: yes
-
Referee: [Abstract] Abstract and § on GMSR-based formulations: The assertion that the augmentation-based construction mitigates gradient-masking and provides a favorable landscape for gradient-based optimization is load-bearing for the framework's advantage over standard quantitative semantics, yet the manuscript provides no supporting error bounds, landscape analysis, or comparison of convergence rates to the original (non-surrogate) problem.
Authors: We agree that no quantitative error bounds, landscape analysis, or convergence rate comparisons are included in the manuscript. The claim is motivated by the fact that GMSR replaces the min and max operators of standard quantitative semantics with generalized means, which are differentiable and do not exhibit the same gradient masking in regions where the robustness is large. The augmentation embeds this into the dynamics for a transcription-independent approach. We will revise the abstract and the GMSR section to provide a more detailed qualitative explanation of the expected benefits and acknowledge that a rigorous landscape analysis is beyond the scope of the current work. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper introduces an augmentation-based embedding of GMSR into continuous-time dynamics for CT-STL constraints, combined with standard successive convexification (prox-convex SCP), time-dilation, and multiple-shooting. No load-bearing step reduces by definition or self-citation to its own inputs; GMSR is presented as a building block with explicit regularization parameter, and claims are supported by external quadrotor/double-integrator examples plus public code. Self-citations on SCP (if present) are not invoked as uniqueness theorems or to close the central argument. The framework remains transcription-independent by construction and does not rename known results or smuggle ansatzes.
Axiom & Free-Parameter Ledger
free parameters (1)
- regularization parameter
axioms (1)
- domain assumption prox-convex sequential convex programming guarantees convergence for the formulated nonconvex program
Reference graph
Works this paper leans on
-
[1]
Principles of Model Checking
Christel Baier and Joost-Pieter Katoen. Principles of Model Checking. MIT press, 2008. URL: https://mitpress.mit.edu/ 9780262026499/principles-of-model-checking/, doi:10.5555/ 1373322
2008
-
[2]
Autonomous vehicle decision-making and monitoring based on signal temporal logic and mixed-integer programming
Yunus Emre Sahin, Rien Quirynen, and Stefano Di Cairano. Autonomous vehicle decision-making and monitoring based on signal temporal logic and mixed-integer programming. In 2020 American Control Conference (ACC), pages 454–459. IEEE,
2020
-
[3]
URL: https://doi.org/10.23919/ACC45564.2020.9147917, doi:10.23919/acc45564.2020.9147917
-
[4]
Trajectory optimization for high- dimensional nonlinear systems under STL specifications
Vince Kurtz and Hai Lin. Trajectory optimization for high- dimensional nonlinear systems under STL specifications. IEEE Control Systems Letters, 5(4):1429–1434, 2020. URL: https://doi. org/10.1109/LCSYS.2020.3038640, doi:10.1109/lcsys.2020. 3038640
-
[5]
Franck Djeumou, Zhe Xu, Murat Cubuktepe, and Ufuk Topcu. Probabilistic control of heterogeneous swarms subject to graph temporal logic specifications: A decentralized and scalable approach. IEEE Transactions on Automatic Control, 68(4):2245– 2260, 2022. URL: https://doi.org/10.1109/TAC.2022.3176797, doi:10.1109/tac.2022.3176797
-
[6]
Multirobot coordination with counting temporal logics
Yunus Emre Sahin, Petter Nilsson, and Necmiye Ozay. Multirobot coordination with counting temporal logics. IEEE Transactions on Robotics, 36(4):1189–1206, 2019. URL: https://doi.org/10.1109/TRO.2019.2957669, doi:10.1109/ tro.2019.2957669. 0.0 2.5 5.0 0 5 10 15Thrust, T [N] 0.0 2.5 5.0 0 5 10 15 20Speed, v [m s □1] 0.0 2.5 5.0 −4 −2 0 2 Altitude, rz [m] 0....
-
[7]
Ali Tevfik Buyukkocak, Derya Aksaray, and Yasin Yazıcıo˘ glu. Planning of heterogeneous multi-agent systems under signal temporal logic specifications with integral predicates. IEEE Robotics and Automation Letters, 6(2):1375–1382, 2021. URL: https://doi.org/10.1109/LRA.2021.3057049, doi:10.1109/ lra.2021.3057049
-
[8]
Planning for heterogeneous teams of robots with temporal logic, capability, and resource constraints
Gustavo A Cardona and Cristian-Ioan Vasile. Planning for heterogeneous teams of robots with temporal logic, capability, and resource constraints. The International Journal of Robotics Research, page 02783649241247285, 2024. doi: 10.1177/02783649241247285
-
[9]
Fly-by-logic: Control of multi-drone fleets with temporal logic objectives
Yash Vardhan Pant, Houssam Abbas, Rhudii A Quaye, and Rahul Mangharam. Fly-by-logic: Control of multi-drone fleets with temporal logic objectives. In 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), pages 186–197. IEEE, 2018. URL: https://doi.org/10.1109/ ICCPS.2018.00026, doi:10.1109/iccps.2018.00026
-
[10]
Mission planning and control of multi-aircraft systems with signal temporal logic specifications
Barı¸ s Ba¸ spınar, Hamsa Balakrishnan, and Emre Koyuncu. Mission planning and control of multi-aircraft systems with signal temporal logic specifications. IEEE Access, 7:155941– 155950, 2019. URL: https://doi.org/10.1109/ACCESS.2019. 2949426, doi:10.1109/access.2019.2949426
-
[11]
A decision tree approach to data classification using signal temporal logic
Giuseppe Bombara, Cristian-Ioan Vasile, Francisco Penedo, Hirotoshi Yasuoka, and Calin Belta. A decision tree approach to data classification using signal temporal logic. In Proceedings of the 19th International Conference on Hybrid Systems: Computation and Control, pages 1–10, 2016. doi: 10.1145/2883817.2883843. 17
-
[12]
A safe preference learning approach for personalization with applications to autonomous vehicles
Ruya Karagulle, Nikos Aréchiga, Andrew Best, Jonathan DeCastro, and Necmiye Ozay. A safe preference learning approach for personalization with applications to autonomous vehicles. IEEE Robotics and Automation Letters, 9(5):4226–4233,
-
[13]
URL: https://doi.org/10.1109/LRA.2024.3375626, doi:10.1109/lra.2024.3375626
-
[14]
STLnet: Signal temporal logic enforced multivariate recurrent neural networks
Meiyi Ma, Ji Gao, Lu Feng, and John Stankovic. STLnet: Signal temporal logic enforced multivariate recurrent neural networks. Advances in Neural Information Processing Systems, 33:14604–14614, 2020. URL: https://dl.acm.org/doi/abs/10. 5555/3495724.3496948, doi:10.5555/3495724.3496948
-
[15]
Q-learning for robust satisfaction of signal temporal logic specifications
Derya Aksaray, Austin Jones, Zhaodan Kong, Mac Schwager, and Calin Belta. Q-learning for robust satisfaction of signal temporal logic specifications. In 2016 IEEE 55th Conference on Decision and Control (CDC), pages 6565–6570. IEEE, 2016. URL: https://doi.org/10.1109/CDC.2016.7799279, doi:10.1109/ cdc.2016.7799279
-
[16]
Mohammed Alshiekh, Roderick Bloem, Rüdiger Ehlers, Bettina Könighofer, Scott Niekum, and Ufuk Topcu. Safe reinforcement learning via shielding. In Proceedings of the AAAI Conference on Artificial Intelligence, volume 32, 2018. URL: https://doi.org/10.1609/AAAI.V32I1.11797, doi: 10.1609/aaai.v32i1.11797
-
[17]
Karen Leung, Nikos Aréchiga, and Marco Pavone. Backpropagation through signal temporal logic specifications: Infusing logical structure into gradient-based methods. The International Journal of Robotics Research, 42(6):356–370, 2023. doi:10.1177/02783649221082115
-
[18]
Amir Pnueli. The temporal logic of programs. In 18th Annual Symposium on Foundations of Computer Science (SFCS 1977), pages 46–57. IEEE, 1977. URL: https://doi.org/10.1109/SFCS. 1977.32, doi:10.1109/sfcs.1977.32
-
[19]
A theory of timed automata
Rajeev Alur and David L Dill. A theory of timed automata. Theoretical Computer Science, 126(2):183–235, 1994. doi:10. 1016/0304-3975(94)90010-8
1994
-
[20]
Receding horizon temporal logic planning
Tichakorn Wongpiromsarn, Ufuk Topcu, and Richard M Murray. Receding horizon temporal logic planning. IEEE Transactions on Automatic Control, 57(11):2817–2830, 2012. URL: https://doi.org/10.1109/TAC.2012.2195811, doi: 10.1109/tac.2012.2195811
-
[21]
TuLiP: a software toolbox for receding horizon temporal logic planning
Tichakorn Wongpiromsarn, Ufuk Topcu, Necmiye Ozay, Huan Xu, and Richard M Murray. TuLiP: a software toolbox for receding horizon temporal logic planning. In Proceedings of the 14th International Conference on Hybrid Systems: Computation and Control, pages 313–314, 2011. doi:10.1145/1967701.1967747
-
[22]
Optimal control of mixed logical dynamical systems with linear temporal logic specifications
Sertac Karaman, Ricardo G Sanfelice, and Emilio Frazzoli. Optimal control of mixed logical dynamical systems with linear temporal logic specifications. In 2008 47th IEEE Conference on Decision and Control, pages 2117–2122. IEEE,
2008
-
[23]
URL: https://doi.org/10.1109/CDC.2008.4739370, doi:10.1109/cdc.2008.4739370
-
[24]
Specifying real-time properties with metric temporal logic
Ron Koymans. Specifying real-time properties with metric temporal logic. Real-Time Systems, 2(4):255–299, 1990. URL: https://doi.org/10.1007/BF01995674, doi:10.1007/ bf01995674
-
[25]
The benefits of relaxing punctuality
Rajeev Alur, Tomás Feder, and Thomas A Henzinger. The benefits of relaxing punctuality. Journal of the ACM (JACM), 43(1):116–146, 1996. doi:10.1145/227595.227602
-
[26]
Monitoring temporal properties of continuous signals
Oded Maler and Dejan Nickovic. Monitoring temporal properties of continuous signals. In International Symposium on Formal Techniques in Real-Time and Fault-Tolerant Systems, pages 152–166. Springer, 2004. doi:10.1007/978-3-540-30206-3_ 12
-
[27]
Robustness of temporal logic specifications for continuous-time signals
Georgios E Fainekos and George J Pappas. Robustness of temporal logic specifications for continuous-time signals. Theoretical Computer Science, 410(42):4262–4291, 2009. doi: 10.1016/j.tcs.2009.06.021
-
[28]
Robust satisfaction of temporal logic over real-valued signals
Alexandre Donzé and Oded Maler. Robust satisfaction of temporal logic over real-valued signals. In International Conference on Formal Modeling and Analysis of Timed Systems, pages 92–106. Springer, 2010. doi:10.1007/ 978-3-642-15297-9_9
2010
-
[29]
Control barrier functions for signal temporal logic tasks
Lars Lindemann and Dimos V Dimarogonas. Control barrier functions for signal temporal logic tasks. IEEE Control Systems Letters, 3(1):96–101, 2018. URL: https://doi.org/10.1109/ LCSYS.2018.2853182, doi:10.1109/lcsys.2018.2853182
-
[30]
Formal methods for control synthesis: An optimization perspective
Calin Belta and Sadra Sadraddini. Formal methods for control synthesis: An optimization perspective. Annual Review of Control, Robotics, and Autonomous Systems, 2:115–140, 2019. doi:10.1146/annurev-control-053018-023717
-
[31]
Model predictive control with signal temporal logic specifications
Vasumathi Raman, Alexandre Donzé, Mehdi Maasoumy, Richard M Murray, Alberto Sangiovanni-Vincentelli, and Sanjit A Seshia. Model predictive control with signal temporal logic specifications. In 53rd IEEE Conference on Decision and Control, pages 81–87. IEEE, 2014. URL: https://doi.org/10. 1109/CDC.2014.7039363, doi:10.1109/cdc.2014.7039363
-
[32]
Robust temporal logic model predictive control
Sadra Sadraddini and Calin Belta. Robust temporal logic model predictive control. In 2015 53rd Annual Allerton Conference on Communication, Control, and Computing (Allerton), pages 772–779. IEEE, 2015. URL: https://doi.org/10.1109/ ALLERTON.2015.7447084, doi:10.1109/allerton.2015. 7447084
-
[33]
Neural network training as an optimal control problem : — an augmented lagrangian approach —
Alëna Rodionova, Lars Lindemann, Manfred Morari, and George J Pappas. Time-robust control for STL specifications. In 2021 60th IEEE Conference on Decision and Control (CDC), pages 572–579. IEEE, 2021. URL: https://doi.org/10.1109/ CDC45484.2021.9683477, doi:10.1109/cdc45484.2021. 9683477
-
[34]
Combined left and right temporal robustness for control under STL specifications
Alëna Rodionova, Lars Lindemann, Manfred Morari, and George J Pappas. Combined left and right temporal robustness for control under STL specifications. IEEE Control Systems Letters, 7:619–624, 2022. URL: https://doi.org/10.1109/LCSYS. 2022.3209928, doi:10.1109/lcsys.2022.3209928
-
[35]
Smooth operator: Control using the smooth robustness of temporal logic
Yash Vardhan Pant, Houssam Abbas, and Rahul Mangharam. Smooth operator: Control using the smooth robustness of temporal logic. In 2017 IEEE Conference on Control Technology and Applications (CCTA), pages 1235–1240. IEEE, 2017. URL: https://doi.org/10.1109/CCTA.2017.8062628, doi:10.1109/ ccta.2017.8062628
-
[37]
A smooth robustness measure of signal temporal logic for symbolic control
Yann Gilpin, Vince Kurtz, and Hai Lin. A smooth robustness measure of signal temporal logic for symbolic control. IEEE Control Systems Letters, 5(1):241–246, 2020. URL: https://doi. org/10.1109/LCSYS.2020.3001875, doi:10.1109/lcsys.2020. 3001875
-
[38]
Successive convexification for optimal control with signal temporal logic specifications
Yuanqi Mao, Behçet Açıkme¸ se, Pierre-Loic Garoche, and Alexandre Chapoutot. Successive convexification for optimal control with signal temporal logic specifications. In Proceedings of the 25th ACM International Conference on Hybrid Systems: Computation and Control, pages 1–7, 2022. doi:10.1145/3501710.3519518
-
[39]
Robust control for signal temporal logic specifications using discrete average 18 space robustness
Lars Lindemann and Dimos V Dimarogonas. Robust control for signal temporal logic specifications using discrete average 18 space robustness. Automatica, 101:377–387, 2019. doi:10.1016/ j.automatica.2018.12.022
2019
-
[40]
Arithmetic-geometric mean robustness for control from signal temporal logic specifications
Noushin Mehdipour, Cristian-Ioan Vasile, and Calin Belta. Arithmetic-geometric mean robustness for control from signal temporal logic specifications. In 2019 American Control Conference (ACC), pages 1690–1695. IEEE, 2019. URL: https://doi.org/10.23919/ACC.2019.8814487, doi:10.23919/ acc.2019.8814487
-
[41]
Mixed integer linear programming approach for control synthesis with weighted signal temporal logic
Gustavo A Cardona, Disha Kamale, and Cristian-Ioan Vasile. Mixed integer linear programming approach for control synthesis with weighted signal temporal logic. In Proceedings of the 26th ACM International Conference on Hybrid Systems: Computation and Control, pages 1–12, 2023. doi:10.1145/ 3575870.3587120
arXiv 2023
-
[42]
Specifying user preferences using weighted signal temporal logic
Noushin Mehdipour, Cristian-Ioan Vasile, and Calin Belta. Specifying user preferences using weighted signal temporal logic. IEEE Control Systems Letters, 5(6):2006–2011, 2020. URL: https://doi.org/10.1109/LCSYS.2020.3047362, doi:10.1109/ lcsys.2020.3047362
-
[43]
Continuous-time signal temporal logic planning with control barrier functions
Peter Varnai and Dimos V Dimarogonas. On robustness metrics for learning STL tasks. In 2020 American Control Conference (ACC), pages 5394–5399. IEEE, 2020. URL: https://doi.org/10.23919/ACC45564.2020.9147692, doi: 10.23919/acc45564.2020.9147692
-
[44]
Noushin Mehdipour, Cristian-Ioan Vasile, and Calin Belta. Average-based robustness for continuous-time signal temporal logic. In 2019 IEEE 58th Conference on Decision and Control (CDC), pages 5312–5317. IEEE, 2019. URL: https://doi.org/10. 1109/CDC40024.2019.9029989, doi:10.1109/cdc40024.2019. 9029989
-
[45]
Time robustness in MTL and expressivity in hybrid system falsification
Takumi Akazaki and Ichiro Hasuo. Time robustness in MTL and expressivity in hybrid system falsification. In International Conference on Computer Aided Verification, pages 356–374. Springer, 2015. doi:10.1007/978-3-319-21668-3_21
-
[46]
Samet Uzun, Purnanand Elango, Pierre-Loic Garoche, and Behçet Açıkme¸ se. Optimization with temporal and logical specifications via generalized mean-based smooth robustness measures. arXiv preprint arXiv:2405.10996, 2024. URL: https: //doi.org/10.48550/arXiv.2405.10996, arXiv:2405.10996, doi:10.48550/arxiv.2405.10996
-
[47]
Barrier function- based model predictive control under signal temporal logic specifications
Maria Charitidou and Dimos V Dimarogonas. Barrier function- based model predictive control under signal temporal logic specifications. In 2021 European Control Conference (ECC), pages 734–739. IEEE, 2021. doi:10.23919/ecc54610.2021.9655231
-
[48]
Control barrier functions with actuation constraints under signal temporal logic specifications
Ali Tevfik Buyukkocak, Derya Aksaray, and Yasin Yazıcıo˘ glu. Control barrier functions with actuation constraints under signal temporal logic specifications. In 2022 European Control Conference (ECC), pages 162–168, 2022. doi:10.23919/ ecc55457.2022.9838028
arXiv 2022
-
[49]
Continuous- time control synthesis under nested signal temporal logic specifications
Pian Yu, Xiao Tan, and Dimos V Dimarogonas. Continuous- time control synthesis under nested signal temporal logic specifications. IEEE Transactions on Robotics, 40:2272–2286,
-
[50]
doi:10.1109/tro.2024.3353081
-
[51]
Continuous-time signal temporal logic planning with control barrier functions
Guang Yang, Calin Belta, and Roberto Tron. Continuous-time signal temporal logic planning with control barrier functions. In 2020 American Control Conference (ACC), pages 4612–4618. IEEE, 2020. doi:10.23919/acc45564.2020.9147387
-
[52]
Temporally robust multi-agent stl motion planning in continuous time
Joris Verhagen, Lars Lindemann, and Jana Tumova. Temporally robust multi-agent stl motion planning in continuous time. arXiv preprint arXiv:2310.10585, pages 251– 258, 2024. arXiv:2310.10585, doi:10.23919/acc60939.2024. 10644216
-
[53]
Signal temporal logic planning with time-varying robustness
Yating Yuan, Thanin Quartz, and Jun Liu. Signal temporal logic planning with time-varying robustness. IEEE Control Systems Letters, 8:3015–3020, 2024. doi:10.1109/lcsys.2024. 3520152
-
[54]
Continuous-time control synthesis for multiple quadrotors under signal temporal logic specifications
Yating Yuan. Continuous-time control synthesis for multiple quadrotors under signal temporal logic specifications. CoRR, abs/2505.07240, 2025. URL: https://arxiv.org/abs/2505.07240, arXiv:2505.07240, doi:10.48550/arXiv.2505.07240
-
[55]
Sampling-based planning under stl specifications: A forward invariance approach,
Gregorio Marchesini, Siyuan Liu, Lars Lindemann, and Dimos V . Dimarogonas. Sampling-based planning under stl specifications: A forward invariance approach. CoRR, abs/2506.10739, 2025. URL: https://arxiv.org/abs/2506.10739, arXiv:2506.10739, doi:10.48550/arXiv.2506.10739
-
[56]
Purnanand Elango, Dayou Luo, Abhinav G Kamath, Samet Uzun, Taewan Kim, and Behçet Açıkme¸ se. Continuous- time successive convexification for constrained trajectory optimization. Automatica, 180:112464, 2025. doi:10.1016/j. automatica.2025.112464
work page doi:10.1016/j 2025
-
[57]
Govind M. Chari, Abhinav G. Kamath, Purnanand Elango, and Behçet Açıkme¸ se. Fast monte carlo analysis for 6-DoF powered-descent guidance via GPU-accelerated sequential convex programming. In AIAA SciTech 2024 Forum, page 1762. AIAA, jan 2024. doi:10.2514/6.2024-1762
-
[58]
Successive convexification for nonlinear model predictive control with continuous-time constraint satisfaction
Samet Uzun, Purnanand Elango, Abhinav G Kamath, Taewan Kim, and Behçet Açıkme¸ se. Successive convexification for nonlinear model predictive control with continuous-time constraint satisfaction. IFAC-PapersOnLine, 58(18):421–429, aug
-
[59]
doi:10.1016/j.ifacol.2024.09.062
-
[60]
Potential of Diffractive Sail’s Sun-Earth Equilibria for Continuous Polar Observation,
Taewan Kim, Abhinav G Kamath, Niyousha Rahimi, Behçet Açıkme¸ se, Mehran Mesbahi, and Jasper Corleis. Six-degree- of-freedom aircraft landing trajectory planning with runway alignment. Journal of Guidance, Control, and Dynamics, 48(10):2225–2242, 2025. URL: https://doi.org/10.2514/1. G008521, doi:10.2514/1.g008521
work page doi:10.2514/1 2025
-
[61]
Low Lunar Orbit Design via Graphical Manipulation of Eccentricity Vector Evolution
Samet Uzun, Behçet Açıkme¸ se, and John M Carson. Sequential convex programming for 6-dof powered descent guidance with continuous-time compound state-triggered constraints. In AIAA SCITECH 2025 Forum, page 1895. American Institute of Aeronautics and Astronautics, jan 2025. doi:10.2514/6. 2025-1895
work page doi:10.2514/6 2025
-
[62]
Motion planning for information acquisition via continuous- time successive convexification
Samet Uzun, Behçet Açıkme¸ se, and Stefano Di Cairano. Motion planning for information acquisition via continuous- time successive convexification. IEEE Control Systems Letters,
-
[63]
URL: https://doi.org/10.1109/LCSYS.2025.3576066, doi:10.1109/lcsys.2025.3576066
-
[64]
Auto-tuned primal-dual successive convexification for powered descent guidance
Skye Mceowen, Carlos M Morales, Daniel J Calderone, Samet Uzun, Edgerton M Cook, and Behcet Acikmese. Auto-tuned primal-dual successive convexification for powered descent guidance. In AIAA SCITECH 2026 Forum, page 0972, 2026. doi:10.2514/6.2026-0972
-
[65]
Kamath, Samet Uzun, Govind M
Abhinav G. Kamath, Samet Uzun, Govind M. Chari, Behçet Açıkme¸ se, Purnanand Elango, and Michael Szmuk. SCvxGEN: Successive convexification with automatic custom code generation for fast and embedded general-purpose trajectory optimization, 2025. Software documentation. URL: https: //scvxgen.com
2025
-
[66]
Samet Uzun and Behçet Açıkme¸ se. Smooth and exact parameterization of continuous-time signal temporal logic specifications for trajectory optimization. arXiv preprint arXiv:2604.04245, 2026. doi:10.48550/arXiv.2604.04245
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2604.04245 2026
-
[67]
Dick Stanley. A multiplicative calculus. Problems, Resources, and Issues in Mathematics Undergraduate Studies, 9(4):310–326, 1999. doi:10.1080/10511979908965937
-
[68]
Multiplicative calculus and its applications
Agamirza E Bashirov, Emine Mısırlı Kurpınar, and Ali Özyapıcı. Multiplicative calculus and its applications. Journal 19 of mathematical analysis and applications, 337(1):36–48, 2008. doi:10.1016/j.jmaa.2007.03.081
-
[69]
Kamath, Purnanand Elango, Yue Yu, Skye Mceowen, Govind M
Abhinav G. Kamath, Purnanand Elango, Yue Yu, Skye Mceowen, Govind M. Chari, John M. Carson, III, and Behçet Açıkme¸ se. Real-time sequential conic optimization for multi- phase rocket landing guidance. IFAC-PapersOnLine, 56(2):3118– 3125, 2023. doi:10.1016/j.ifacol.2023.10.1444
-
[70]
A multiple shooting algorithm for direct solution of optimal control problems
H G Bock and K J Plitt. A multiple shooting algorithm for direct solution of optimal control problems. IFAC Proceedings Volumes, 17(2):1603–1608, jul 1984. 9th IFAC World Congress: A Bridge Between Control Science and Technology, Budapest, Hungary, 2-6 July 1984. doi:10.1016/s1474-6670(17) 61205-9
-
[71]
A proximal method for composite optimization with smooth and convex components
Samet Uzun, Dayou Luo, Behçet Açıkme¸ se, and Aleksandr Y Aravkin. A proximal method for composite optimization with smooth and convex components. arXiv preprint arXiv:2512.20602, 2025. URL: https://arxiv.org/abs/2512. 20602, arXiv:2512.20602, doi:10.48550/arXiv.2512.20602
-
[72]
JAX: composable transformations of Python+ NumPy programs, 2018
James Bradbury, Roy Frostig, Peter Hawkins, Matthew James Johnson, Chris Leary, Dougal Maclaurin, George Necula, Adam Paszke, Jake VanderPlas, Skye Wanderman-Milne, et al. JAX: composable transformations of Python+ NumPy programs, 2018. URL: https://github.com/jax-ml/jax
2018
-
[73]
Cvxpy: A python- embedded modeling language for convex optimization
Steven Diamond and Stephen Boyd. Cvxpy: A python- embedded modeling language for convex optimization. The Journal of Machine Learning Research, 17(1):2909–2913, 2016. URL: https://www.cvxpy.org/,doi:10.5555/2946645. 3007036
-
[74]
QOCO: A quadratic objective conic optimizer with custom solver generation
Govind M Chari and Behçet Açıkme¸ se. QOCO: A quadratic objective conic optimizer with custom solver generation. arXiv preprint arXiv:2503.12658, 2025. URL: https://doi.org/10. 48550/arXiv.2503.12658, arXiv:2503.12658, doi:10.48550/ arxiv.2503.12658
arXiv 2025
-
[75]
Modelling and control of quadcopter,
Teppo Luukkonen. Modelling and control of quadcopter,
-
[76]
URL: https://sal.aalto.fi/publications/pdf-files/eluu11_ public.pdf. 6 Appendix 6.1 Feasibility of an FOH parameterization of the dilation factor Proposition 7 (Why ZOH is used for s(τ)) If the dila- tion factor were parameterized by FOH, then the physical interval lengths would satisfy ∆tk = 1 2 (sk + sk+1)∆τ. As a result, the normalized interval-length ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.