Distilling Neuro-Symbolic Programs into 3D Multi-modal LLMs
Pith reviewed 2026-06-30 11:24 UTC · model grok-4.3
The pith
Distilling reasoning patterns from neuro-symbolic programs into 3D MLLMs unifies explicit spatial verification with open-vocabulary flexibility.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
APEIRIA is a neuro-symbolic 3D MLLM that bridges the two paradigms by distilling symbolic reasoning patterns into the model with natural language chain-of-thought. Its three-stage curriculum progressively builds capabilities through 3D perception alignment, CoT supervised fine-tuning from program traces, and CoT reinforcement learning for open-set extension. By transferring reasoning structures rather than concept-specific knowledge, the method preserves transparent reasoning and the modular interchangeability of planning and perception components, yielding performance that surpasses prior neuro-symbolic 3D methods while matching state-of-the-art 3D MLLMs on spatial reasoning benchmarks.
What carries the argument
The three-stage curriculum (perception alignment, CoT-SFT from program traces, CoT-RL) that transfers reasoning patterns rather than concept-specific knowledge into the MLLM.
If this is right
- The model can process complex natural language queries and open-vocabulary concepts while retaining explicit spatial verification at each step.
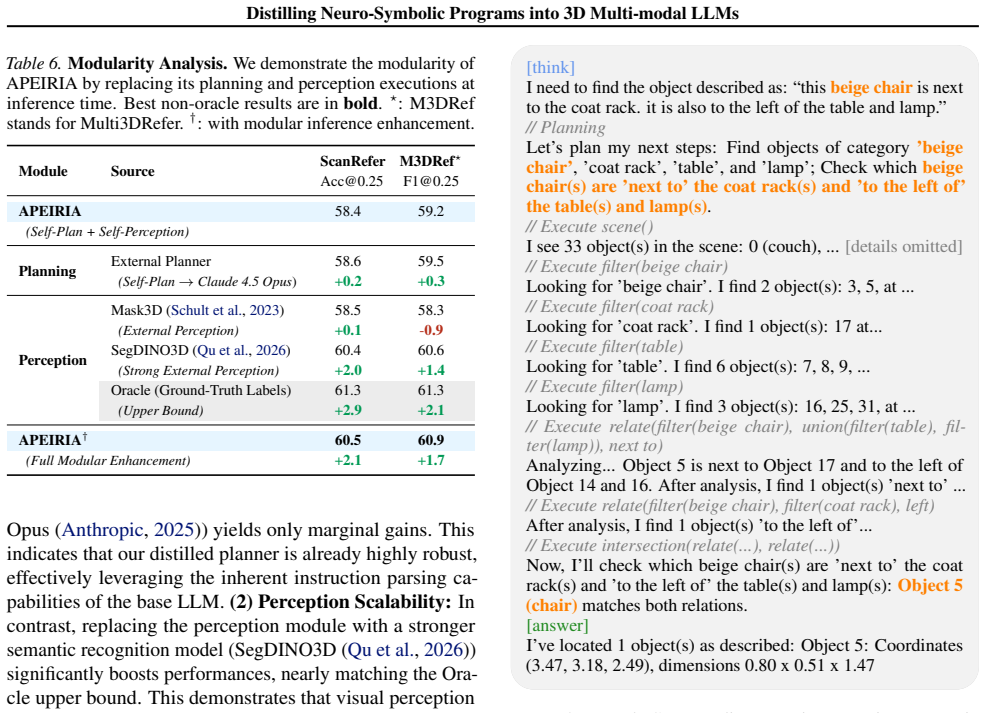
- Planning and perception components stay modular and interchangeable, allowing substitution without retraining the full system.
- Transparent reasoning is maintained because the chain-of-thought outputs remain mappable to the original symbolic program structure.
- Performance on grounding, question answering, and captioning tasks reaches or exceeds that of prior neuro-symbolic 3D methods and current 3D MLLMs.
- The same distillation process extends reasoning patterns to deeply nested instructions without requiring closed-set concept limits.
Where Pith is reading between the lines
- The same pattern-transfer approach could be tested in 2D vision or robotic planning domains where symbolic programs already exist for specific subtasks.
- If modularity holds, perception modules trained on different sensor types could be swapped into the same reasoning backbone for cross-domain use.
- Chain-of-thought distillation may serve as a general bridge for injecting interpretability into other large models that currently lack explicit verification.
- The method implies that future work could measure how faithfully the MLLM's intermediate steps align with symbolic traces across increasing program depth.
Load-bearing premise
The three-stage curriculum successfully teaches the MLLM to perform explicit stepwise verification on open-set concepts without the verification steps becoming unreliable or non-modular.
What would settle it
A controlled test on novel 3D scenes with unseen objects where the model's generated chain-of-thought steps either fail to correctly verify a spatial relation that the original symbolic program would handle or cannot be traced back to the program's modular components.
Figures
read the original abstract
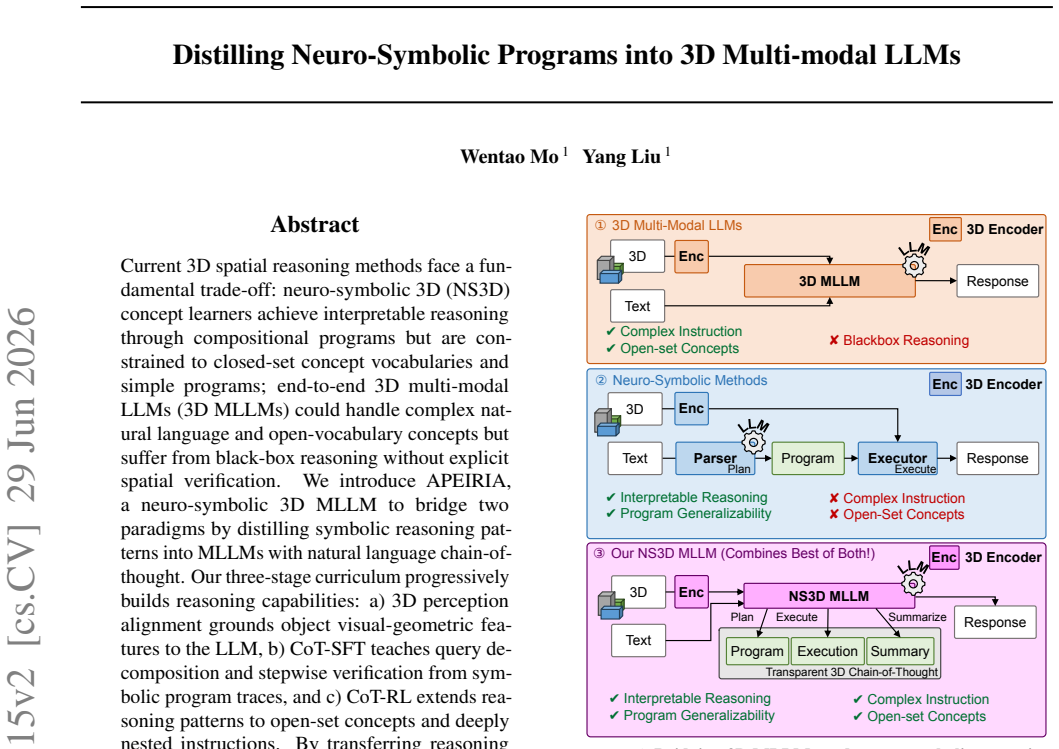
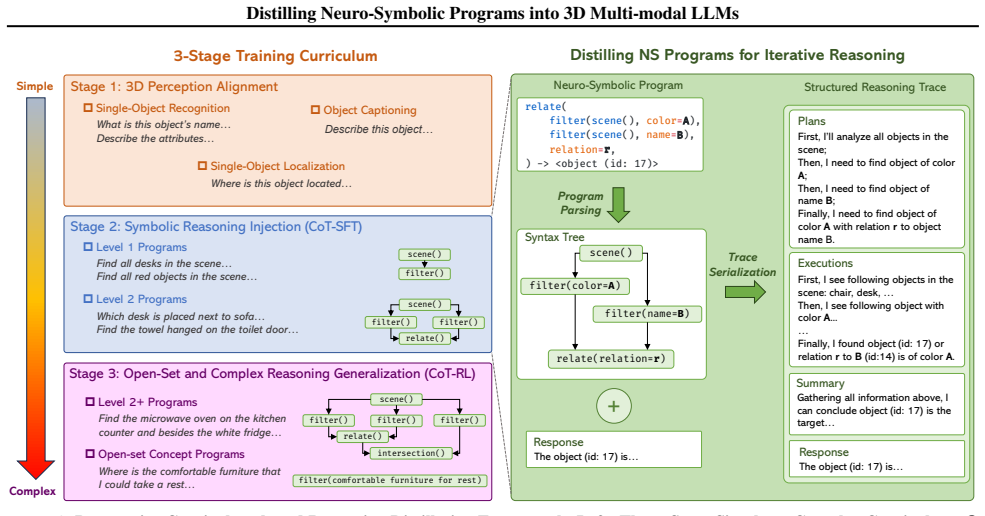
Current 3D spatial reasoning methods face a fundamental trade-off: neuro-symbolic 3D (NS3D) concept learners achieve interpretable reasoning through compositional programs but are constrained to closed-set concept vocabularies and simple programs; end-to-end 3D multi-modal LLMs (3D MLLMs) could handle complex natural language and open-vocabulary concepts but suffer from black-box reasoning without explicit spatial verification. We introduce APEIRIA, a neuro-symbolic 3D MLLM to bridge two paradigms by distilling symbolic reasoning patterns into MLLMs with natural language chain-of-thought. Our three-stage curriculum progressively builds reasoning capabilities: a) 3D perception alignment grounds object visual-geometric features to the LLM, b) CoT-SFT teaches query decomposition and stepwise verification from symbolic program traces, and c) CoT-RL extends reasoning patterns to open-set concepts and deeply nested instructions. By transferring reasoning patterns rather than concept-specific knowledge, APEIRIA preserves key NS3D virtues: transparent reasoning and modular interchangeability of planning and perception components. Evaluations on grounding, question answering, and captioning show that APEIRIA surpasses prior NS3D methods and matches state-of-the-art 3D MLLMs on 3D spatial reasoning datasets, unifying symbolic methods' systematic reasoning with MLLMs' flexibility. Code is available at https://github.com/oceanflowlab/APEIRIA.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces APEIRIA, a neuro-symbolic 3D MLLM that distills reasoning patterns from symbolic programs into an MLLM via a three-stage curriculum (3D perception alignment, CoT-SFT on program traces, and CoT-RL for open-set extension). It claims this preserves NS3D virtues of transparent stepwise verification and modular interchangeability of planning/perception components while matching SOTA 3D MLLM performance and surpassing prior NS3D methods on grounding, QA, and captioning tasks.
Significance. If the central claims hold with supporting evidence, the work would meaningfully bridge interpretable neuro-symbolic 3D methods and flexible end-to-end MLLMs; the public code release at the cited GitHub repository strengthens reproducibility.
major comments (2)
- [Abstract] Abstract: the performance claims (surpassing prior NS3D methods and matching SOTA 3D MLLMs) are asserted without any reported metrics, dataset names, ablation studies, or error analysis, so the data-to-claim link cannot be evaluated.
- [Abstract] Abstract (three-stage curriculum description): the claim that CoT-RL extends reasoning patterns to open-set concepts while preserving explicit, reliable, and modular verification steps lacks any described mechanism, ablation, or analysis showing that the steps do not collapse into non-modular pattern matching or reward hacking once the symbolic scaffold is removed.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We agree that strengthening the abstract with concrete evidence will improve clarity and will revise accordingly. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the performance claims (surpassing prior NS3D methods and matching SOTA 3D MLLMs) are asserted without any reported metrics, dataset names, ablation studies, or error analysis, so the data-to-claim link cannot be evaluated.
Authors: We agree the abstract would be stronger with explicit metrics. The full manuscript reports quantitative results on grounding, question answering, and captioning tasks across standard 3D spatial reasoning datasets, including direct comparisons showing APEIRIA surpassing prior NS3D methods and matching SOTA 3D MLLMs, plus ablations and error analysis in the experiments section. We will revise the abstract to include representative metrics, dataset names, and references to these supporting analyses. revision: yes
-
Referee: [Abstract] Abstract (three-stage curriculum description): the claim that CoT-RL extends reasoning patterns to open-set concepts while preserving explicit, reliable, and modular verification steps lacks any described mechanism, ablation, or analysis showing that the steps do not collapse into non-modular pattern matching or reward hacking once the symbolic scaffold is removed.
Authors: The mechanism is described in the methods: the CoT-RL reward is explicitly tied to verification consistency from the prior CoT-SFT stage to encourage retention of modular steps. We acknowledge the abstract does not detail this or provide supporting analysis. We will revise the abstract to briefly note the reward design and add a targeted ablation in the experiments section measuring post-RL verification step consistency to address potential collapse or reward hacking. revision: yes
Circularity Check
Empirical curriculum training shows no circularity
full rationale
The paper presents a three-stage training procedure (perception alignment, CoT-SFT from program traces, CoT-RL) evaluated on external 3D spatial reasoning datasets for grounding, QA, and captioning. No equations, fitted parameters, or derivations are shown that reduce claimed performance or preservation of NS3D virtues to quantities defined by the authors' own inputs or self-citations. The central claims rest on empirical results rather than any self-referential reduction, making the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2405.10370 , year=
Chen, S., Chen, X., Zhang, C., Li, M., Yu, G., Fei, H., Zhu, H., Fan, J., and Chen, T. Ll3da: Visual interactive in- struction tuning for omni-3d understanding reasoning and planning. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 26428–26438, 2024a. Chen, S., Zhu, H., Li, M., Chen, X., Guo, P., Lei, Y ., Y...
-
[2]
Naturally supervised 3d visual grounding with language-regularized concept learners.2024 IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), pp
Feng, C., Hsu, J., Liu, W., and Wu, J. Naturally supervised 3d visual grounding with language-regularized concept learners.2024 IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), pp. 13269–13278,
2024
-
[3]
Ns3d: Neuro-symbolic ground- ing of 3d objects and relations.2023 IEEE/CVF Con- ference on Computer Vision and Pattern Recognition (CVPR), pp
Hsu, J., Mao, J., and Wu, J. Ns3d: Neuro-symbolic ground- ing of 3d objects and relations.2023 IEEE/CVF Con- ference on Computer Vision and Pattern Recognition (CVPR), pp. 2614–2623,
2023
-
[4]
Huang, H., Chen, Y ., Wang, Z., Huang, R., Xu, R., Wang, T., Liu, L., Cheng, X., Zhao, Y ., Pang, J., et al. Chat-scene: Bridging 3d scene and large language models with object identifiers.Advances in Neural Information Processing Systems, 2024a. Huang, J., Yong, S., Ma, X., Linghu, X., Li, P., Wang, Y ., Li, Q., Zhu, S.-C., Jia, B., and Huang, S. An embo...
-
[5]
Muon is Scalable for LLM Training
URL https: //kellerjordan.github.io/posts/muon/. Li, X., Liu, J., Guo, Y ., Dong, H., and Liu, Y . 3d weakly supervised visual grounding at category and instance lev- els. InProceedings of the International Conference on Robotics and Automation, 2025a. Li, Y ., Wang, Z., and Liang, W. R2g: Reasoning to ground in 3d scenes.Pattern Recognition, 168:111728, ...
work page internal anchor Pith review Pith/arXiv arXiv
-
[6]
Language-to-space programming for training-free 3D vi- sual grounding
Mi, B., Wang, H., Wang, T., Chen, Y ., and Pang, J. Language-to-space programming for training-free 3D vi- sual grounding. InProceedings of the 2025 Conference on Empirical Methods in Natural Language Processing, pp. 3844–3864. Association for Computational Linguis- tics,
2025
-
[7]
OpenAI. Gpt-4 technical report,arXiv preprint arXiv:2303.08774,
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
LMM-R1: Empowering 3B LMMs with Strong Reasoning Abilities Through Two-Stage Rule-Based RL
Peng, Y ., Zhang, G., Zhang, M., You, Z., Liu, J., Zhu, Q., Yang, K., Xu, X., Geng, X., and Yang, X. Lmm-r1: Em- powering 3b lmms with strong reasoning abilities through two-stage rule-based rl,arXiv preprint arXiv:2503.07536,
work page internal anchor Pith review Pith/arXiv arXiv
-
[9]
DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models
11 Distilling Neuro-Symbolic Programs into 3D Multi-modal LLMs Shao, Z., Wang, P., Zhu, Q., Xu, R., Song, J., Bi, X., Zhang, H., Zhang, M., Li, Y . K., Wu, Y ., and Guo, D. Deepseek- math: Pushing the limits of mathematical reasoning in open language models,arXiv preprint arXiv:2402.03300,
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
Yang, A., Li, A., Yang, B., Zhang, B., Hui, B., Zheng, B., Yu, B., Gao, C., Huang, C., Lv, C., Zheng, C., Liu, D., Zhou, F., Huang, F., Hu, F., Ge, H., Wei, H., Lin, H., Tang, J., Yang, J., Tu, J., Zhang, J., Yang, J., Yang, J., Zhou, J., Zhou, J., Lin, J., Dang, K., Bao, K., Yang, K., Yu, L., Deng, L., Li, M., Xue, M., Li, M., Zhang, P., Wang, P., Zhu, Q...
work page internal anchor Pith review Pith/arXiv arXiv
-
[11]
Yuan, Z., Jiang, S., Feng, C.-M., Zhang, Y ., Cui, S., Li, Z., and Zhao, N. Scene-r1: Video-grounded large language models for 3d scene reasoning without 3d annotations, arXiv preprint arXiv:2506.17545,
-
[12]
Zhou, S., Zheng, M., Zheng, F., and Liu, Y . Scalable ob- ject relation encoding for better 3d spatial reasoning in large language models,arXiv preprint arXiv:2603.24721,
-
[13]
Supplementary Material In this supplementary material, we provide comprehensive details to support reproducibility and further understanding of our method
12 Distilling Neuro-Symbolic Programs into 3D Multi-modal LLMs A. Supplementary Material In this supplementary material, we provide comprehensive details to support reproducibility and further understanding of our method. Section A.1 presents implementation details including detailed model architecture specifications and training protocols for all three c...
2025
-
[14]
Where is 13 Distilling Neuro-Symbolic Programs into 3D Multi-modal LLMs the object with ID <id> located?
and attribute annotations from MMScan (Lyu et al., 2024). Sourced from ScanNet and textual attributes extracted from captions. • Object Localization:Tasks involve outputting 3D coordinates of specified objects based on its object ID (“Where is 13 Distilling Neuro-Symbolic Programs into 3D Multi-modal LLMs the object with ID <id> located?”). We utilize gro...
2024
-
[15]
Think about the scene first
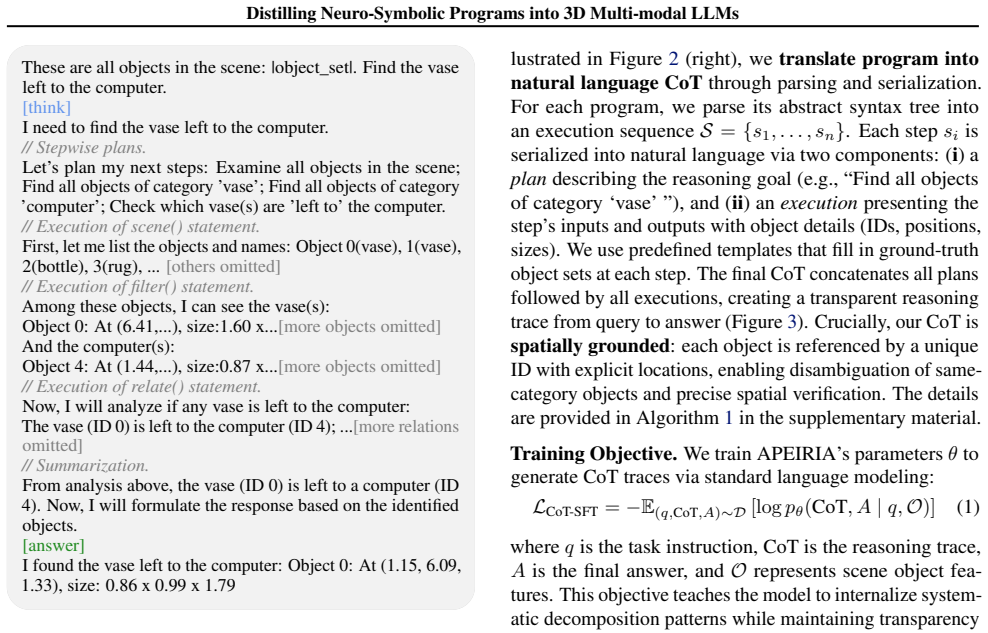
captions where the target is unambiguous. The total alignment dataset comprises approximately 193K instruction-response pairs. Stage 2: Symbolic Reasoning Injection via CoT-SFT.For CoT-SFT, we translate neuro-symbolic programs into iterative natural language reasoning traces. Each program step is converted into aPlansentence describing the operation, and ...
2020
-
[16]
{description}
and Multi3DRefer (Zhang et al., 2023), which contain natural language instructions with complex nested structures and open-vocabulary concepts. Since ground-truth execution traces are unavailable for these datasets, we rely solely on outcome supervision (whether the predicted bounding box matches the target) combined with our format reward to guide explor...
2023
-
[17]
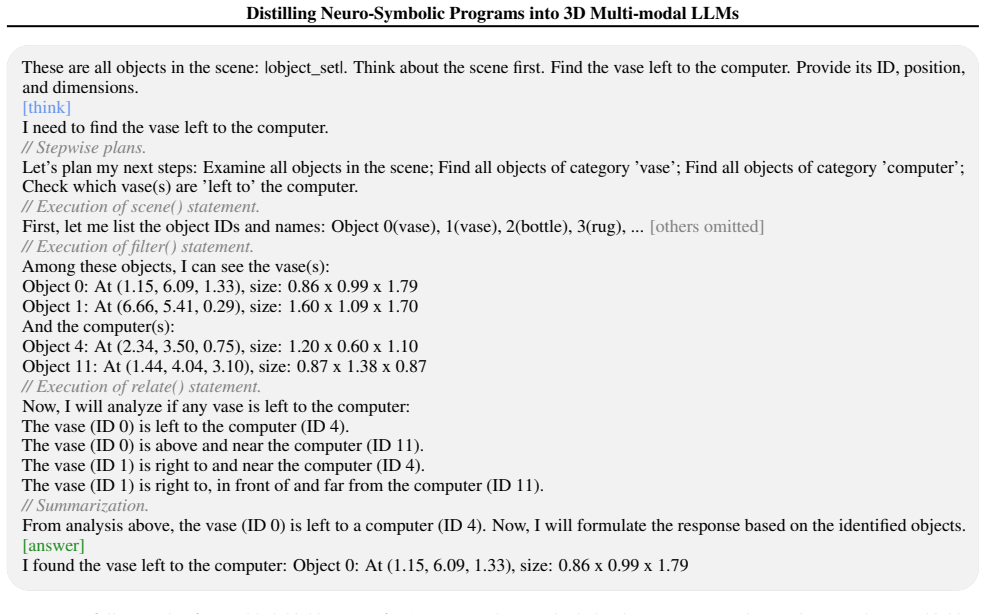
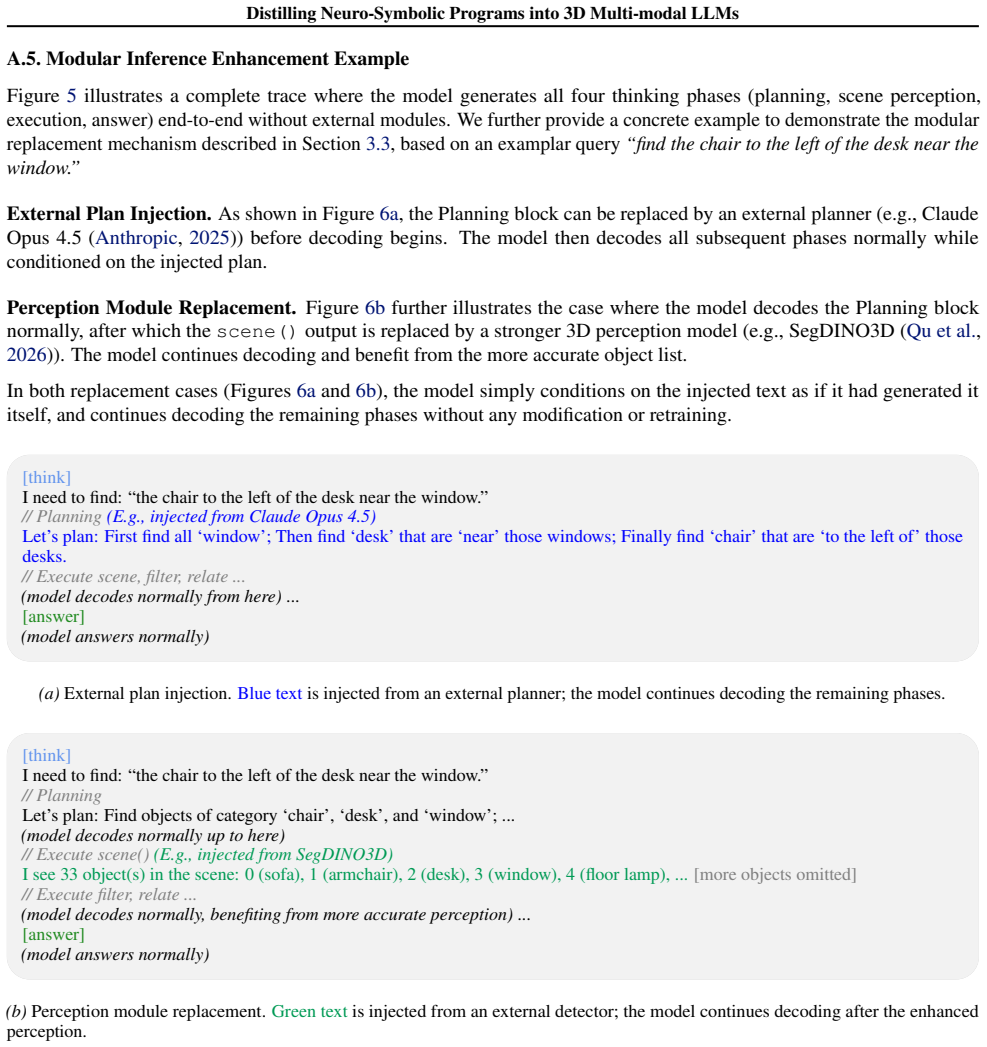
find the chair to the left of the desk near the window
is left to a computer (ID 4). Now, I will formulate the response based on the identified objects. [answer] I found the vase left to the computer: Object 0: At (1.15, 6.09, 1.33), size: 0.86 x 0.99 x 1.79 Figure 5.A full example of assembled thinking trace for APEIRIA. The trace includes the scene context, instruction, step-by-step thinking trace with plan...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.