MorphIt: Flexible Spherical Approximation of Robot Morphology for Representation-driven Adaptation
Pith reviewed 2026-05-19 03:49 UTC · model grok-4.3
The pith
MorphIt approximates robot shapes with tunable spheres that gradient optimization can adjust for task-specific accuracy or speed.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
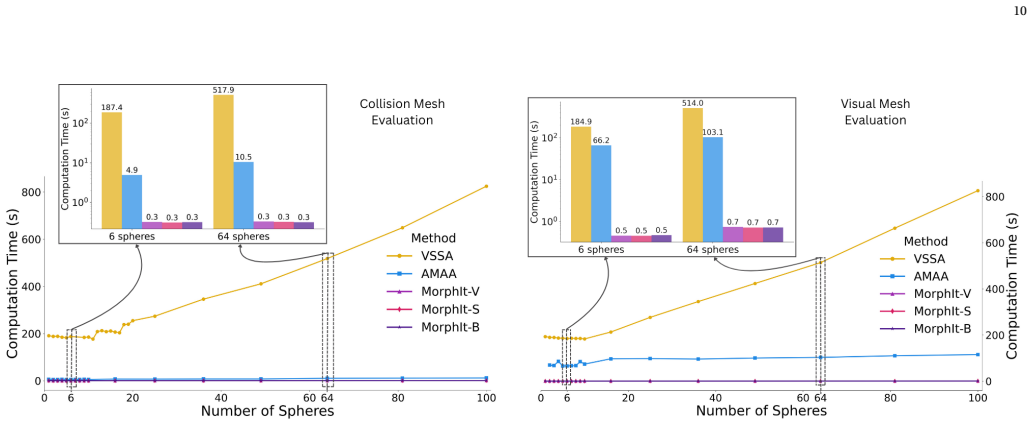
MorphIt is a spherical approximation method that applies gradient-based optimization with tunable parameters to produce robot morphology representations. These representations balance geometric fidelity against computational cost and can be adapted to the demands of specific robotic tasks such as collision detection or confined-space navigation. The method produces usable approximations up to 100 times faster than prior approaches while achieving higher accuracy with fewer spheres.
What carries the argument
Gradient-based optimization of spherical approximations equipped with tunable parameters that directly control the accuracy-efficiency tradeoff.
If this is right
- Collision detection queries become both faster and more accurate when the sphere count and placement are tuned to the scene.
- Contact-rich manipulation simulations can run at higher speeds without losing essential contact geometry.
- Navigation planners gain the ability to switch representations on the fly when moving from open areas to tight passages.
- Existing robotics pipelines can adopt the approximations with minimal code changes because the output remains a set of spheres.
Where Pith is reading between the lines
- The same tunable representation could be updated continuously during online operation rather than computed once before deployment.
- Pairing the method with task-success metrics in simulation might allow automatic selection of the accuracy-efficiency setting without human tuning.
- The approach could be tested on hardware with real-time replanning to check whether the reported speedups survive sensor noise and dynamics.
Load-bearing premise
Gradient-based optimization applied to spherical approximations will reliably generate representations that preserve the geometric details needed for robotics tasks like collision detection and contact simulation.
What would settle it
Measure collision-detection error and runtime on a standard robot arm model in a cluttered workspace; if MorphIt approximations produce higher error rates or slower queries than a fixed high-resolution mesh or the cited baseline methods, the central performance claim does not hold.
Figures









read the original abstract
What if a robot could rethink its own morphological representation to better meet the demands of diverse tasks? Most robotic systems today treat their physical form as a fixed constraint rather than an adaptive resource, forcing the same rigid geometric representation to serve applications with vastly different computational and precision requirements. We introduce MorphIt, a novel spherical approximation framework that treats morphological representation as a tunable resource. MorphIt enables task-driven morphological adaptation through gradient-based optimization with tunable parameters that provide explicit control over the accuracy-efficiency tradeoff. Unlike existing approaches that rely on either labor-intensive manual specification or inflexible computational methods optimized for visualization rather than robotics, MorphIt generates spherical approximations up to 100x faster while maintaining superior geometric fidelity. Quantitative evaluations demonstrate that MorphIt outperforms baseline approaches (Variational Sphere Set Approximation and Adaptive Medial-Axis Approximation), achieving better mesh approximation with fewer spheres. Through seamless integration with existing robotics infrastructure, MorphIt enables enhanced capabilities in collision detection accuracy, contact-rich interaction simulation, and navigation through confined spaces. By dynamically adapting geometric representations to task requirements, robots can now exploit their physical embodiment as an active resource rather than an inflexible parameter, opening new frontiers for manipulation in environments where physical form must continuously balance precision with computational tractability.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces MorphIt, a spherical approximation framework for robot morphologies that uses gradient-based optimization with tunable parameters to control the accuracy-efficiency tradeoff. It claims to generate approximations up to 100x faster than prior methods while achieving superior geometric fidelity, outperforming baselines (Variational Sphere Set Approximation and Adaptive Medial-Axis Approximation) with better mesh approximation using fewer spheres, and enabling improved performance in robotics tasks including collision detection, contact simulation, and navigation.
Significance. If the quantitative claims hold and the approximations reliably preserve geometric properties required for downstream robotics use, the work could meaningfully advance adaptive morphological representations that treat robot shape as a tunable resource rather than a fixed constraint. The emphasis on integration with existing robotics infrastructure and explicit accuracy-efficiency control is a constructive direction. No machine-checked proofs, reproducible code releases, or parameter-free derivations are described.
major comments (2)
- [Abstract] Abstract: the claims of 'up to 100x faster' and 'better mesh approximation with fewer spheres' while 'outperforming baseline approaches' are presented without any experimental setup, timing metrics, error measures, hardware details, or statistical analysis, rendering it impossible to assess whether the data support the stated superiority. This is load-bearing for the central quantitative claims.
- [Method] Method description (gradient-based optimization): no explicit loss terms, barrier functions, projection operators, or containment penalties are supplied to enforce that spheres remain inside the original mesh or avoid spurious overlaps. Without such mechanisms the approximations may violate non-penetration or containment constraints essential for collision detection and contact simulation, directly undermining the robotics-application assertions.
minor comments (2)
- [Abstract and Introduction] The abstract and introduction repeatedly use 'seamless integration' without concrete examples of API calls, middleware compatibility, or code snippets that would clarify how MorphIt plugs into standard robotics pipelines.
- [Introduction] Notation for the tunable parameters controlling the accuracy-efficiency tradeoff is introduced but not given explicit symbols or ranges in the summary sections, which would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback. We address each major comment below, indicating whether revisions have been made to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claims of 'up to 100x faster' and 'better mesh approximation with fewer spheres' while 'outperforming baseline approaches' are presented without any experimental setup, timing metrics, error measures, hardware details, or statistical analysis, rendering it impossible to assess whether the data support the stated superiority. This is load-bearing for the central quantitative claims.
Authors: The abstract is intentionally concise to meet length limits while highlighting key outcomes. Full experimental details—including the set of robot meshes evaluated, hardware platform (AMD Ryzen 9 CPU with NVIDIA RTX 4090), timing protocol (wall-clock time averaged over 50 independent runs with standard deviation), error metrics (Hausdorff distance, volumetric overlap ratio, and surface deviation), and statistical comparisons (Wilcoxon signed-rank tests)—appear in Section 4. To strengthen the abstract’s self-containment, we have added a single sentence summarizing the evaluation protocol and the observed range of speedups and sphere-count reductions. revision: yes
-
Referee: [Method] Method description (gradient-based optimization): no explicit loss terms, barrier functions, projection operators, or containment penalties are supplied to enforce that spheres remain inside the original mesh or avoid spurious overlaps. Without such mechanisms the approximations may violate non-penetration or containment constraints essential for collision detection and contact simulation, directly undermining the robotics-application assertions.
Authors: We agree that explicit formulation improves clarity. Section 3.2 already defines the composite loss (geometric fidelity term plus a signed-distance containment penalty) and a pairwise repulsion term to limit overlaps. The update employs a simple projection operator that clamps sphere centers to the interior of the mesh and caps radii to enforce strict containment. We have expanded the section with the precise mathematical expressions for each term, the barrier formulation, and the projection step, together with a short discussion of how these constraints are preserved throughout optimization. revision: yes
Circularity Check
No circularity detected in derivation or claims
full rationale
The paper presents MorphIt as a new gradient-based optimization framework for generating spherical approximations of robot morphology, with claims of speed and fidelity supported by quantitative comparisons to external baselines (Variational Sphere Set Approximation and Adaptive Medial-Axis Approximation). No equations or steps reduce by construction to fitted inputs, self-definitions, or self-citations; the method is described as a tunable algorithmic proposal whose outputs are evaluated independently rather than defined in terms of the target results. The derivation chain remains self-contained without invoking load-bearing prior work by the same authors or renaming known results as novel derivations.
Axiom & Free-Parameter Ledger
free parameters (1)
- tunable parameters for accuracy-efficiency tradeoff
axioms (1)
- domain assumption Spherical sets can provide sufficient geometric fidelity for core robotics tasks such as collision detection and contact simulation
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
MORPH IT directly optimizes a set of sphere parameters (centers and radii) through gradient-based optimization with specialized loss functions... Ltotal = wc Lcover + wo Loverlap + ...
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Quantitative evaluations demonstrate that MORPH IT outperforms baseline approaches... achieving better mesh approximation with fewer spheres
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 2 Pith papers
-
Physically Accurate Rigid-Body Dynamics in Particle-Based Simulation
PBD-R adds a momentum-conservation constraint to position-based dynamics to deliver physically accurate rigid-body dynamics while remaining computationally lighter than MuJoCo.
-
cuRoboV2: Dynamics-Aware Motion Generation with Depth-Fused Distance Fields for High-DoF Robots
cuRoboV2 unifies B-spline optimization, GPU-native dense signed distance fields, and scalable whole-body kinematics and dynamics to achieve 99.7% success on payloaded manipulators and 99.6% collision-free IK on 48-DoF...
Reference graph
Works this paper leans on
-
[1]
Steven M. LaValle. Planning Algorithms. Cambridge Univer- sity Press, 2006
work page 2006
-
[2]
Jia Pan and Dinesh Manocha. “Fast probabilistic colli- sion checking for sampling-based motion planning using locality-sensitive hashing”. In: The International Journal of Robotics Research 35.12 (2016), pp. 1477–1496
work page 2016
-
[3]
Reducing collision checking for sampling-based motion planning using graph neural networks
Chenning Yu and Sicun Gao. “Reducing collision checking for sampling-based motion planning using graph neural networks”. In: Advances in Neural Information Processing Systems 34 (2021), pp. 4274–4289
work page 2021
-
[4]
curobo: Parallelized collision-free minimum-jerk robot motion generation
Balakumar Sundaralingam et al. “curobo: Parallelized collision-free minimum-jerk robot motion generation”. In: arXiv preprint arXiv:2310.17274 (2023)
-
[5]
Motions in microseconds via vectorized sampling-based planning
Wil Thomason, Zachary Kingston, and Lydia E Kavraki. “Motions in microseconds via vectorized sampling-based planning”. In: 2024 IEEE International Conference on Robotics and Automation (ICRA) . IEEE. 2024, pp. 8749–8756
work page 2024
-
[6]
A literature review of bounding volumes hierarchy focused on collision detec- tion
Simena Dinas and José M Bañón. “A literature review of bounding volumes hierarchy focused on collision detec- tion”. In: Ingeniería y competitividad 17.1 (2015), pp. 49–62
work page 2015
-
[7]
RobotSDF: Implicit Morphology Mod- eling for the Robotic Arm
Yusheng Yang et al. “RobotSDF: Implicit Morphology Mod- eling for the Robotic Arm”. In: Sensors 24.16 (2024), p. 5248
work page 2024
-
[8]
Guangming Wang et al. “Nerf in robotics: A survey”. In: arXiv preprint arXiv:2405.01333 (2024)
-
[9]
Inverse dynamics trajectory optimization for contact-implicit model predictive control,
Vince Kurtz et al. “Inverse dynamics trajectory optimization for contact-implicit model predictive control”. In: arXiv preprint arXiv:2309.01813 (2023)
-
[10]
Chen-Yuan Hsu et al. “Autocomplete element fields”. In: Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems . 2020, pp. 1–13
work page 2020
-
[11]
Variational sphere set approximation for solid objects
Rui Wang et al. “Variational sphere set approximation for solid objects”. In: The Visual Computer 22 (2006), pp. 612– 621
work page 2006
-
[12]
Adaptive medial- axis approximation for sphere-tree construction
Gareth Bradshaw and Carol O’Sullivan. “Adaptive medial- axis approximation for sphere-tree construction”. In: ACM Transactions on Graphics (TOG) 23.1 (2004), pp. 1–26
work page 2004
-
[13]
Efficient collision detection of com- plex deformable models using AABB trees
Gino van den Bergen. “Efficient collision detection of com- plex deformable models using AABB trees”. In: Journal of graphics tools 2.4 (1997), pp. 1–13
work page 1997
-
[14]
OBBTree: A hierarchical structure for rapid interference detection
Stefan Gottschalk, Ming C Lin, and Dinesh Manocha. “OBBTree: A hierarchical structure for rapid interference detection”. In: Proceedings of the 23rd annual conference on Computer graphics and interactive techniques . 1996, pp. 171–180
work page 1996
-
[15]
Efficient collision detection using bounding volume hierarchies of k-DOPs
James T Klosowski et al. “Efficient collision detection using bounding volume hierarchies of k-DOPs”. In: IEEE transac- tions on Visualization and Computer Graphics 4.1 (1998), pp. 21–36
work page 1998
-
[16]
Distance fields for rapid collision detection in physically based modeling
Arnulph Fuhrmann, Gerrit Sobotka, and Clemens Groß. “Distance fields for rapid collision detection in physically based modeling”. In: Proceedings of GraphiCon . Vol. 2003. Citeseer. 2003, pp. 58–65
work page 2003
-
[17]
Local optimization for robust signed distance field collision
Miles Macklin et al. “Local optimization for robust signed distance field collision”. In: Proceedings of the ACM on Computer Graphics and Interactive Techniques 3.1 (2020), pp. 1–17
work page 2020
-
[18]
Voxel-based space monitoring in human-robot collaboration environ- ments
Liliana Antao, Joao Reis, and Gil Gonçalves. “Voxel-based space monitoring in human-robot collaboration environ- ments”. In: 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA) . IEEE. 2019, pp. 552–559
work page 2019
-
[19]
A comprehensive study of 3-D vision- based robot manipulation
Yang Cong et al. “A comprehensive study of 3-D vision- based robot manipulation”. In: IEEE Transactions on Cyber- netics 53.3 (2021), pp. 1682–1698
work page 2021
-
[20]
Octree-based approach to real-time collision-free path planning for robot manipula- tor
Koichi Hamada and Yoichi Hori. “Octree-based approach to real-time collision-free path planning for robot manipula- tor”. In: Proceedings of 4th IEEE International Workshop on Advanced Motion Control-AMC’96-MIE . Vol. 2. IEEE. 1996, pp. 705–710
work page 1996
-
[21]
OctoMap: An efficient probabilistic 3D mapping framework based on octrees
Armin Hornung et al. “OctoMap: An efficient probabilistic 3D mapping framework based on octrees”. In: Autonomous robots 34 (2013), pp. 189–206
work page 2013
-
[22]
Urban scene under- standing from aerial and ground LIDAR data
Eunyoung Kim and Gérard Medioni. “Urban scene under- standing from aerial and ground LIDAR data”. In: Machine Vision and Applications 22 (2011), pp. 691–703
work page 2011
-
[23]
Im- proving the GJK algorithm for faster and more reliable distance queries between convex objects
Mattia Montanari, Nik Petrinic, and Ettore Barbieri. “Im- proving the GJK algorithm for faster and more reliable distance queries between convex objects”. In: ACM Trans- actions on Graphics (TOG) 36.3 (2017), pp. 1–17
work page 2017
-
[24]
3d gaussian splatting in robotics: A survey
Siting Zhu et al. “3d gaussian splatting in robotics: A survey”. In: arXiv preprint arXiv:2410.12262 (2024)
-
[25]
Deepsdf: Learning continuous signed distance functions for shape representation
Jeong Joon Park et al. “Deepsdf: Learning continuous signed distance functions for shape representation”. In: Proceed- ings of the IEEE/CVF conference on computer vision and pattern recognition . 2019, pp. 165–174
work page 2019
-
[26]
3D Representation Methods: A Survey
Zhengren Wang. “3D Representation Methods: A Survey”. In: arXiv preprint arXiv:2410.06475 (2024)
-
[27]
Learning models as functionals of signed-distance fields for manipulation planning
Danny Driess et al. “Learning models as functionals of signed-distance fields for manipulation planning”. In: Con- ference on robot learning . PMLR. 2022, pp. 245–255
work page 2022
-
[28]
A hierarchy of detail for fast collision de- tection
Begoña Martinez-Salvador, Angel P del Pobil, and Miguel Perez-Francisco. “A hierarchy of detail for fast collision de- tection”. In: Proceedings. 2000 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS 2000)(Cat. No. 00CH37113). Vol. 1. IEEE. 2000, pp. 745–750
work page 2000
-
[29]
Ef- ficient calculation of minimum distance between capsules and its use in robotics
Mohammad Safeea, Pedro Neto, and Richard Bearee. “Ef- ficient calculation of minimum distance between capsules and its use in robotics”. In: IEEE Access 7 (2018), pp. 5368– 5373
work page 2018
-
[30]
Fast collision detection for motion planning using shape primitive skeletons
Mukulika Ghosh, Shawna Thomas, and Nancy M Am- ato. “Fast collision detection for motion planning using shape primitive skeletons”. In: Algorithmic Foundations of Robotics XIII: Proceedings of the 13th Workshop on the Algorithmic Foundations of Robotics 13 . Springer. 2020, pp. 36–51
work page 2020
-
[31]
Atsusi Sutou and Yang Dai. “Global optimization approach to unequal global optimization approach to unequal sphere packing problems in 3D”. In: Journal of Optimization The- ory and Applications 114 (2002), pp. 671–694
work page 2002
-
[32]
A literature review on circle and sphere packing problems: Models and method- ologies
Mhand Hifi and Rym M’ Hallah. “A literature review on circle and sphere packing problems: Models and method- ologies”. In: Advances in Operations Research 2009.1 (2009), p. 150624
work page 2009
-
[33]
A geometric algorithm based on tetrahedral meshes to generate a dense polydisperse sphere packing
Jean-François Jerier et al. “A geometric algorithm based on tetrahedral meshes to generate a dense polydisperse sphere packing”. In: Granular Matter 11 (2009), pp. 43–52
work page 2009
-
[34]
High-density sphere packing for discrete element method simulations
Carlos Labra and Eugenio Onate. “High-density sphere packing for discrete element method simulations”. In: Com- munications in Numerical Methods in Engineering 25.7 (2009), pp. 837–849
work page 2009
-
[35]
Packing spherical discrete ele- ments for large scale simulations
Jean-François Jerier et al. “Packing spherical discrete ele- ments for large scale simulations”. In: Computer Methods in Applied Mechanics and Engineering 199.25-28 (2010), pp. 1668–1676. 14
work page 2010
-
[36]
Protosphere: A gpu- assisted prototype guided sphere packing algorithm for arbitrary objects
René Weller and Gabriel Zachmann. “Protosphere: A gpu- assisted prototype guided sphere packing algorithm for arbitrary objects”. In: ACM SIGGRAPH ASIA 2010 Sketches . 2010, pp. 1–2
work page 2010
-
[37]
Fast sphere packings with adaptive grids on the gpu
Jörn Teuber et al. “Fast sphere packings with adaptive grids on the gpu”. In: GI AR/VRWorkshop (Würzburg, Germany, vol. 4 (2013)
work page 2013
-
[38]
Adaptive Polydisperse Sphere Packings for High Accuracy Computations of the Gravi- tational Field
Hermann Meißenhelter et al. “ Adaptive Polydisperse Sphere Packings for High Accuracy Computations of the Gravi- tational Field”. In: 2023 IEEE Aerospace Conference . IEEE. 2023, pp. 1–10
work page 2023
-
[39]
Decomposition of three-dimensional objects into spheres
Joseph O’Rourke and Norman Badler. “Decomposition of three-dimensional objects into spheres”. In: IEEE Transac- tions on Pattern Analysis and Machine Intelligence 3 (1979), pp. 295–305
work page 1979
-
[40]
A spherical representation of a human body for visual- izing movement
Norman I Badler, Joseph O’Rourke, and Hasida Toltzis. “A spherical representation of a human body for visual- izing movement”. In: Proceedings of the IEEE 67.10 (1979), pp. 1397–1403
work page 1979
-
[41]
Approximating polyhedra with spheres for time-critical collision detection
Philip M Hubbard. “Approximating polyhedra with spheres for time-critical collision detection”. In: ACM Transactions on Graphics (TOG) 15.3 (1996), pp. 179–210
work page 1996
- [42]
-
[43]
Real-time collision detection and response using sphere-trees
Carol O’Sullivan and John Dingliana. “Real-time collision detection and response using sphere-trees”. In: (1999)
work page 1999
-
[44]
Comparing sphere-tree generators and hierarchy updates for deformable objects collision detec- tion
Marcos Garcia et al. “Comparing sphere-tree generators and hierarchy updates for deformable objects collision detec- tion”. In: Advances in Visual Computing: First International Symposium, ISVC 2005, Lake Tahoe, NV , USA, December 5-7,
work page 2005
- [45]
-
[46]
Simulating sharp geometric features in six degrees-of-freedom haptic rendering
Ge Yu et al. “Simulating sharp geometric features in six degrees-of-freedom haptic rendering”. In: IEEE Transactions on Haptics 8.1 (2014), pp. 67–78
work page 2014
-
[47]
Foam: A Tool for Spherical Ap- proximation of Robot Geometry
Sai Coumar et al. “Foam: A Tool for Spherical Ap- proximation of Robot Geometry”. In: arXiv preprint arXiv:2503.13704 (2025)
-
[48]
Least squares quantization in PCM
Stuart Lloyd. “Least squares quantization in PCM”. In: IEEE transactions on information theory 28.2 (1982), pp. 129–137
work page 1982
-
[49]
Variational shape approximation
David Cohen-Steiner, Pierre Alliez, and Mathieu Desbrun. “Variational shape approximation”. In: ACM SIGGRAPH 2004 Papers . 2004, pp. 905–914
work page 2004
-
[50]
Structure Recovery via Hybrid Variational Surface Approximation
Jianhua Wu and Leif Kobbelt. “Structure Recovery via Hybrid Variational Surface Approximation.” In: Comput. Graph. Forum. Vol. 24. 3. 2005, pp. 277–284
work page 2005
-
[51]
Variational mannequin approximation using spheres and capsules
Nannan Wu et al. “Variational mannequin approximation using spheres and capsules”. In: IEEE Access 6 (2018), pp. 25921–25929
work page 2018
-
[52]
Optimal motion planning for humanoid robots
Antonio El Khoury, Florent Lamiraux, and Michel Taix. “Optimal motion planning for humanoid robots”. In: 2013 IEEE international conference on robotics and automation . IEEE. 2013, pp. 3136–3141
work page 2013
-
[53]
Real-time kinematics-based self-collision avoidance algorithm for dual-arm robots
Maolin Lei et al. “Real-time kinematics-based self-collision avoidance algorithm for dual-arm robots”. In: Applied Sci- ences 10.17 (2020), p. 5893
work page 2020
-
[54]
A collision-free mpc for whole-body dynamic locomotion and manipulation
Jia-Ruei Chiu et al. “A collision-free mpc for whole-body dynamic locomotion and manipulation”. In: 2022 interna- tional conference on robotics and automation (ICRA) . IEEE. 2022, pp. 4686–4693
work page 2022
-
[55]
Tensor train for global optimization problems in robotics
Suhan Shetty et al. “Tensor train for global optimization problems in robotics”. In: The International Journal of Robotics Research 43.6 (2024), pp. 811–839
work page 2024
-
[56]
Conformalized Reachable Sets for Obstacle Avoidance With Spheres
Yongseok Kwon et al. “Conformalized Reachable Sets for Obstacle Avoidance With Spheres”. In: arXiv preprint arXiv:2410.09924 (2024)
-
[57]
A novel approach to obstacle avoid- ance for an I-AUV
Roberto Simoni et al. “A novel approach to obstacle avoid- ance for an I-AUV”. In: 2018 IEEE/OES Autonomous Under- water Vehicle Workshop (AUV) . IEEE. 2018, pp. 1–6
work page 2018
-
[58]
Boundary-RRT* al- gorithm for drone collision avoidance and interleaved path re-planning
Je-Kwan Park and Tai-Myoung Chung. “Boundary-RRT* al- gorithm for drone collision avoidance and interleaved path re-planning”. In: Journal of Information Processing Systems 16.6 (2020), pp. 1324–1342
work page 2020
-
[59]
A new representation for collision avoidance and detec- tion
Angel P Del Pobil, Miguel Angel Serna, and Juan Llovet. “A new representation for collision avoidance and detec- tion”. In: Proceedings 1992 IEEE International Conference on Robotics and Automation . IEEE Computer Society. 1992, pp. 246–247
work page 1992
-
[60]
Chomp: Covariant hamiltonian opti- mization for motion planning
Matt Zucker et al. “Chomp: Covariant hamiltonian opti- mization for motion planning”. In: The International jour- nal of robotics research 32.9-10 (2013), pp. 1164–1193
work page 2013
-
[61]
STOMP: Stochastic trajectory optimization for motion planning
Mrinal Kalakrishnan et al. “STOMP: Stochastic trajectory optimization for motion planning”. In: 2011 IEEE interna- tional conference on robotics and automation . IEEE. 2011, pp. 4569–4574
work page 2011
-
[62]
CAT-RRT: Motion Planning that Admits Contact One Link at a Time
Nataliya Nechyporenko et al. “CAT-RRT: Motion Planning that Admits Contact One Link at a Time”. In: 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. 2023, pp. 4849–4856
work page 2023
-
[63]
Pokerrt: Poking as a skill and failure recovery tactic for planar non-prehensile manipulation
Anuj Pasricha et al. “Pokerrt: Poking as a skill and failure recovery tactic for planar non-prehensile manipulation”. In: IEEE Robotics and Automation Letters 7.2 (2022), pp. 4480– 4487
work page 2022
-
[64]
Caleb Escobedo et al. “Contact anticipation for physical human–robot interaction with robotic manipulators using onboard proximity sensors”. In: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE. 2021, pp. 7255–7262
work page 2021
-
[65]
A framework for the systematic eval- uation of obstacle avoidance and object-aware controllers
Caleb Escobedo et al. “A framework for the systematic eval- uation of obstacle avoidance and object-aware controllers”. In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE. 2022, pp. 8117–8124
work page 2022
-
[66]
Global planning for contact-rich manipula- tion via local smoothing of quasi-dynamic contact models
Tao Pang et al. “Global planning for contact-rich manipula- tion via local smoothing of quasi-dynamic contact models”. In: IEEE Transactions on robotics 39.6 (2023), pp. 4691–4711
work page 2023
-
[67]
Dexterous contact-rich manipulation via the contact trust region
HJ Suh et al. “Dexterous contact-rich manipulation via the contact trust region”. In: arXiv preprint arXiv:2505.02291 (2025)
-
[68]
Yongpeng Jiang et al. “Robust Model-Based In-Hand Manip- ulation with Integrated Real-Time Motion-Contact Planning and Tracking”. In: arXiv preprint arXiv:2505.04978 (2025)
-
[69]
Bounding volume hierarchies for level- of-detail collision handling
Gareth Bradshaw. “Bounding volume hierarchies for level- of-detail collision handling”. PhD thesis. Trinity College Dublin, 2002
work page 2002
-
[70]
Gpu-accelerated robotic simulation for distributed reinforcement learning
Jacky Liang et al. “Gpu-accelerated robotic simulation for distributed reinforcement learning”. In: Conference on Robot Learning . PMLR. 2018, pp. 270–282
work page 2018
-
[71]
Justin Carpentier et al. “The Pinocchio C++ library: A fast and flexible implementation of rigid body dynamics algo- rithms and their analytical derivatives”. In: 2019 IEEE/SICE International Symposium on System Integration (SII) . IEEE. 2019, pp. 614–619
work page 2019
-
[72]
Drake: Model-based design and verification for robotics
Russ Tedrake and the Drake Development Team. Drake: Model-based design and verification for robotics . 2019. URL : https://drake.mit.edu
work page 2019
-
[73]
PyBullet, a Python module for physics simulation for games, robotics and machine learning
Erwin Coumans and Yunfei Bai. PyBullet, a Python module for physics simulation for games, robotics and machine learning. http://pybullet.org. 2019
work page 2019
-
[74]
Mujoco: A physics engine for model-based control
Emanuel Todorov, Tom Erez, and Yuval Tassa. “Mujoco: A physics engine for model-based control”. In: 2012 IEEE/RSJ international conference on intelligent robots and systems . IEEE. 2012, pp. 5026–5033
work page 2012
-
[75]
Sphere-Meshes: Shape Approximation using Spherical Quadric Error Metrics
Jean-Marc Thiery, Emilie Guy, and Tamy Boubekeur. “Sphere-Meshes: Shape Approximation using Spherical Quadric Error Metrics”. In: ACM Transaction on Graphics (Proc. SIGGRAPH Asia 2013) 32.6 (2013), Art. No. 178. 15
work page 2013
-
[76]
3d gaussian splatting for real-time radiance field rendering
Bernhard Kerbl et al. “3d gaussian splatting for real-time radiance field rendering.” In: ACM Trans. Graph. 42.4 (2023), pp. 139–1
work page 2023
-
[77]
Gjk++: Leveraging acceleration meth- ods for faster collision detection
Louis Montaut et al. “Gjk++: Leveraging acceleration meth- ods for faster collision detection”. In: IEEE Transactions on Robotics (2024)
work page 2024
-
[78]
Velocity level approximation of pressure field contact patches
Joseph Masterjohn et al. “Velocity level approximation of pressure field contact patches”. In: IEEE Robotics and Au- tomation Letters 7.4 (2022), pp. 11593–11600
work page 2022
-
[79]
Adam Fishman et al. “Motion Policy Networks”. In: Pro- ceedings of the 6th Conference on Robot Learning (CoRL) . 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.