An Efficient B-spline-Based Kinodynamic Replanning Framework for Quadrotors
Pith reviewed 2026-05-25 17:35 UTC · model grok-4.3
The pith
B-spline properties let quadrotors replan trajectories from non-static initial states while keeping safety and dynamical feasibility.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The framework exploits B-spline advantageous properties to create an EBK search algorithm that finds a feasible trajectory with minimum control effort and time from non-static initial states, followed by an elastic optimization approach that refines control point placement to the optimal location and compensates for discretization.
What carries the argument
EBK search algorithm on B-spline control points, followed by elastic optimization to refine placement.
If this is right
- Replanning works directly from non-static quadrotor states instead of requiring static resets.
- Trajectories remain both collision-free and dynamically feasible by construction.
- The method runs efficiently enough for onboard use on vision-based quadrotors.
- It applies across different quadrotor platforms without major redesign.
Where Pith is reading between the lines
- The same B-spline search-plus-optimization structure could be tested on other underactuated vehicles with similar differential constraints.
- Combining the framework with online map updates from depth sensors might further reduce replanning latency in cluttered spaces.
- If the elastic optimization step is replaced by a faster local adjustment, total computation time could drop while preserving the same guarantees.
Load-bearing premise
B-splines inherently support feasible trajectories from non-static states and elastic optimization can refine them without creating new safety or feasibility problems.
What would settle it
A recorded flight where the output trajectory violates velocity or acceleration limits or intersects an obstacle despite the EBK search and elastic optimization being applied.
Figures

















read the original abstract
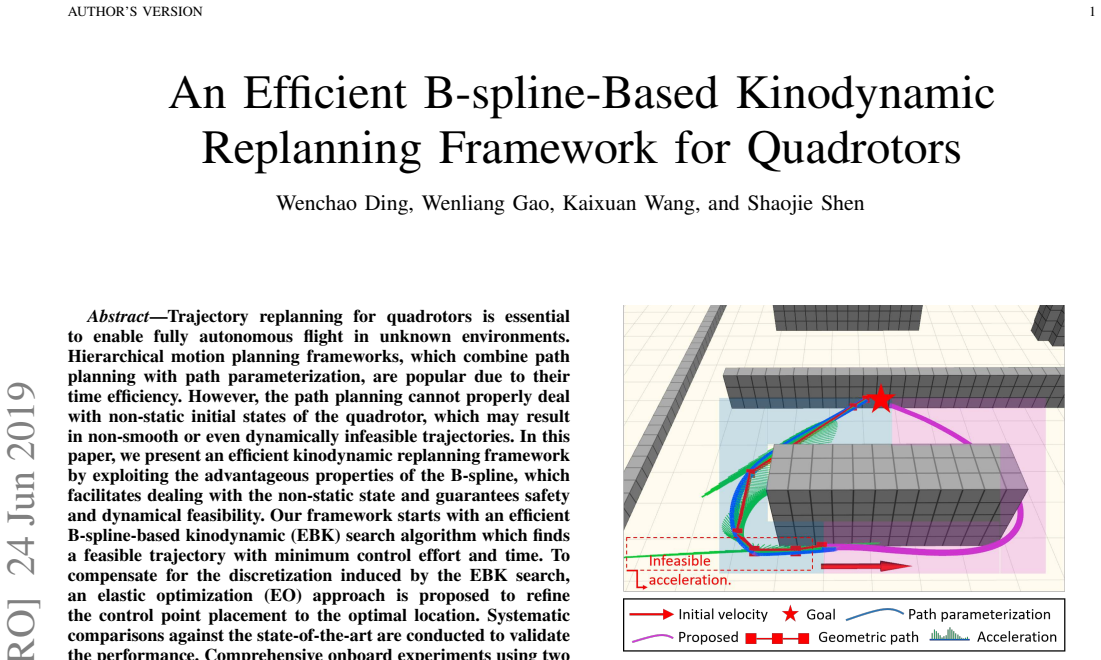
Trajectory replanning for quadrotors is essential to enable fully autonomous flight in unknown environments. Hierarchical motion planning frameworks, which combine path planning with path parameterization, are popular due to their time efficiency. However, the path planning cannot properly deal with non-static initial states of the quadrotor, which may result in non-smooth or even dynamically infeasible trajectories. In this paper, we present an efficient kinodynamic replanning framework by exploiting the advantageous properties of the B-spline, which facilitates dealing with the non-static state and guarantees safety and dynamical feasibility. Our framework starts with an efficient B-spline-based kinodynamic (EBK) search algorithm which finds a feasible trajectory with minimum control effort and time. To compensate for the discretization induced by the EBK search, an elastic optimization (EO) approach is proposed to refine the control point placement to the optimal location. Systematic comparisons against the state-of-the-art are conducted to validate the performance. Comprehensive onboard experiments using two different vision-based quadrotors are carried out showing the general applicability of the framework.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to present an efficient B-spline-based kinodynamic replanning framework for quadrotors that addresses limitations of hierarchical planners with non-static initial states. It introduces an EBK search algorithm to generate dynamically feasible trajectories minimizing control effort and time, followed by an elastic optimization (EO) step to refine control point placement and compensate for discretization effects, while guaranteeing safety and feasibility. The approach is validated via systematic comparisons to state-of-the-art methods and comprehensive onboard experiments on two vision-based quadrotors.
Significance. If the central claims hold, the framework provides a practical advance for autonomous quadrotor navigation in unknown environments by directly incorporating kinodynamic constraints and non-static states into B-spline-based search and optimization. The exploitation of B-spline advantageous properties for both search and refinement, combined with real-robot validation across two platforms, strengthens applicability. The paper supplies algorithmic details and experimental results supporting the claims without internal contradictions.
minor comments (3)
- [Abstract] The abstract states that the framework 'guarantees safety and dynamical feasibility' via EBK and EO; a brief clarification in the introduction or §3 on the precise conditions (e.g., bounds on discretization or optimization convergence) would improve precision without altering the central argument.
- Notation for B-spline control points and knot vectors is introduced but could be made more consistent across the EBK search description and the EO formulation to aid readability.
- [Experiments] In the experimental section, the comparison metrics would benefit from explicit mention of whether the reported times include the full pipeline (search + optimization) for fair benchmarking against baselines.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript, the accurate summary of our contributions, and the recommendation for minor revision. No specific major comments were raised in the report.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper describes an algorithmic framework (EBK search followed by elastic optimization) that exploits B-spline properties to handle non-static initial states while enforcing safety and feasibility. No load-bearing step reduces to a self-definition, a fitted input renamed as prediction, or a self-citation chain; the central claims rest on explicit algorithmic construction and experimental validation rather than tautological equivalence to inputs. The derivation is therefore self-contained.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our framework starts with an efficient B-spline-based kinodynamic (EBK) search algorithm which finds a feasible trajectory with minimum control effort and time. ... an elastic optimization (EO) approach is proposed to refine the control point placement
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the advantageous properties of the B-spline, which facilitates dealing with the non-static state and guarantees safety and dynamical feasibility
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight
A quadrotor trajectory generation pipeline combines kinodynamic search in discretized control space, B-spline optimization using Euclidean distance field gradients and convex hull properties, and iterative time adjust...
Reference graph
Works this paper leans on
-
[1]
Minimum snap trajectory generation and control for quadrotors,
D. Mellinger and V . Kumar, “Minimum snap trajectory generation and control for quadrotors,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom., 2011, pp. 2520–2525
work page 2011
-
[2]
Online quadrotor trajectory generation and au- tonomous navigation on point clouds,
F. Gao and S. Shen, “Online quadrotor trajectory generation and au- tonomous navigation on point clouds,” in IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) , 2016, pp. 139–146
work page 2016
-
[3]
Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments,
C. Richter, A. Bry, and N. Roy, “Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments,” in Intl. J. Robot. Research. Springer, 2016, pp. 649–666
work page 2016
-
[4]
S. Liu, M. Watterson, K. Mohta, K. Sun, S. Bhattacharya, C. J. Taylor, and V . Kumar, “Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments,” IEEE Robotics and Automation Letters , vol. 2, 2017
work page 2017
-
[5]
J. Chen, T. Liu, and S. Shen, “Online generation of collision-free trajectories for quadrotor flight in unknown cluttered environments,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. IEEE, 2016, pp. 1476–1483
work page 2016
-
[6]
Randomized kinodynamic planning,
S. M. LaValle and J. J. Kuffner Jr, “Randomized kinodynamic planning,” Intl. J. Robot. Research , vol. 20, no. 5, pp. 378–400, 2001
work page 2001
-
[7]
Kinodynamic RRT*: Asymptotically optimal motion planning for robots with linear dynamics,
D. J. Webb and J. van den Berg, “Kinodynamic RRT*: Asymptotically optimal motion planning for robots with linear dynamics,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. , 2013, pp. 5054–5061
work page 2013
-
[8]
J. D. Gammell, S. S. Srinivasa, and T. D. Barfoot, “Batch informed trees (bit*): Sampling-based optimal planning via the heuristically guided search of implicit random geometric graphs,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. , 2015, pp. 3067–3074
work page 2015
-
[9]
Sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,” Intl. J. Robot. Research , pp. 846–894, 2011
work page 2011
-
[10]
L. Janson, E. Schmerling, A. Clark, and M. Pavone, “Fast marching tree: A fast marching sampling-based method for optimal motion planning in many dimensions,” Intl. J. Robot. Research , pp. 883–921, 2015
work page 2015
-
[11]
Mo- tion planning in complex environments using closed-loop prediction,
Y . Kuwata, J. Teo, S. Karaman, G. Fiore, E. Frazzoli, and J. How, “Mo- tion planning in complex environments using closed-loop prediction,” in AIAA Guidance, Navigation and Control Conference and Exhibit , 2008, p. 7166
work page 2008
-
[12]
C. Xie, J. van den Berg, S. Patil, and P. Abbeel, “Toward asymptotically optimal motion planning for kinodynamic systems using a two-point boundary value problem solver,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. , 2015
work page 2015
-
[13]
Asymptotically optimal sampling- based kinodynamic planning,
Y . Li, Z. Littlefield, and K. E. Bekris, “Asymptotically optimal sampling- based kinodynamic planning,” Intl. J. Robot. Research , vol. 35, no. 5, pp. 528–564, 2016
work page 2016
-
[14]
Search-based motion planning for quadrotors using linear quadratic minimum time control,
S. Liu, N. Atanasov, K. Mohta, and V . Kumar, “Search-based motion planning for quadrotors using linear quadratic minimum time control,” in Proc. of the IEEE/RSJ Intl. Conf. on Intell. Robots and Syst. , 2017
work page 2017
-
[15]
Trajectory replanning for quadrotors using kinodynamic search and elastic optimization,
W. Ding, W. Gao, K. Wang, and S. Shen, “Trajectory replanning for quadrotors using kinodynamic search and elastic optimization,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. IEEE, 2018, pp. 7595– 7602. 20 AUTHOR’S VERSION
work page 2018
-
[16]
J. Van Den Berg, D. Wilkie, S. J. Guy, M. Niethammer, and D. Manocha, “LQG-obstacles: Feedback control with collision avoidance for mobile robots with motion and sensing uncertainty,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. IEEE, 2012, pp. 346–353
work page 2012
-
[17]
Vector field following for quadrotors using differential flatness,
D. Zhou and M. Schwager, “Vector field following for quadrotors using differential flatness,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. IEEE, 2014, pp. 6567–6572
work page 2014
-
[18]
Stochastic automatic collision avoidance for tele-operated unmanned aerial vehicles,
D. Bareiss, J. Van Den Berg, and K. K. Leang, “Stochastic automatic collision avoidance for tele-operated unmanned aerial vehicles,” in Proc. of the IEEE/RSJ Intl. Conf. on Intell. Robots and Syst. IEEE, 2015, pp. 4818–4825
work page 2015
-
[19]
Search-based Motion Planning for Aggressive Flight in SE(3)
S. Liu, K. Mohta, N. Atanasov, and V . Kumar, “Search-based motion planning for aggressive flight in SE (3),” arXiv preprint arXiv:1710.02748, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[20]
Planning long dynamically feasible maneuvers for autonomous vehicles,
M. Likhachev and D. Ferguson, “Planning long dynamically feasible maneuvers for autonomous vehicles,” Intl. J. Robot. Research , vol. 28, 2009
work page 2009
-
[21]
S. Aine, S. Swaminathan, V . Narayanan, V . Hwang, and M. Likhachev, “Multi-heuristic A*,” Intl. J. Robot. Research , pp. 224–243, 2016
work page 2016
-
[22]
Incremental sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Incremental sampling-based algorithms for optimal motion planning,” Proc. of Robot.: Sci. and Syst. , vol. 104, p. 2, 2010
work page 2010
-
[23]
A real-time framework for kinodynamic planning with application to quadrotor obstacle avoidance,
R. E. Allen and M. Pavone, “A real-time framework for kinodynamic planning with application to quadrotor obstacle avoidance,” Ph.D. dis- sertation, Stanford University, 2016
work page 2016
-
[24]
Incremental micro-UA V motion replanning for exploring unknown environments,
M. Pivtoraiko, D. Mellinger, and V . Kumar, “Incremental micro-UA V motion replanning for exploring unknown environments,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. IEEE, 2013, pp. 2452– 2458
work page 2013
-
[25]
Continuous-time trajectory optimization for online UA V replan- ning,
H. Oleynikova, M. Burri, Z. Taylor, J. Nieto, R. Siegwart, and E. Gal- ceran, “Continuous-time trajectory optimization for online UA V replan- ning,” in Proc. of the IEEE/RSJ Intl. Conf. on Intell. Robots and Syst. , 2016, pp. 5332–5339
work page 2016
-
[26]
Efficient mixed-integer planning for UA Vs in cluttered environments,
R. Deits and R. Tedrake, “Efficient mixed-integer planning for UA Vs in cluttered environments,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom., 2015, pp. 42–49
work page 2015
-
[27]
Close proximity obstacle avoidance using sampling-based planners,
S. K. Kannan, W. M. Sisson, D. A. Ginsberg, J. C. Derenick, X. C. Ding, T. A. Frewen, and H. Sane, “Close proximity obstacle avoidance using sampling-based planners,” in AHS Specialists’ Meeting on Unmanned Rotorcraft and Network-Centric Operations , 2013
work page 2013
-
[28]
J. Chen and S. Shen, “Improving octree-based occupancy maps using environment sparsity with application to aerial robot navigation,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. IEEE, 2017, pp. 3656–3663
work page 2017
-
[29]
General matrix representations for b-splines,
K. Qin, “General matrix representations for b-splines,” The Visual Computer, vol. 16, no. 3, pp. 177–186, 2000
work page 2000
-
[30]
An analytical continuous-curvature path- smoothing algorithm,
K. Yang and S. Sukkarieh, “An analytical continuous-curvature path- smoothing algorithm,” IEEE Transactions on Robotics , vol. 26, no. 3, pp. 561–568, 2010
work page 2010
-
[31]
L. Yang, D. Song, J. Xiao, J. Han, L. Yang, and Y . Cao, “Generation of dynamically feasible and collision free trajectory by applying six-order Bezier curve and local optimal reshaping,” in Proc. of the IEEE/RSJ Intl. Conf. on Intell. Robots and Syst. IEEE, 2015, pp. 643–648
work page 2015
-
[32]
Safe trajectory generation for complex urban environments using spatio-temporal semantic corridor,
W. Ding, L. Zhang, J. Chen, and S. Shen, “Safe trajectory generation for complex urban environments using spatio-temporal semantic corridor,” IEEE Robot. and Auto. Letters , 2019
work page 2019
-
[33]
Gradient-based online quadrotor safe trajectory planning in 3d complex environments,
F. Gao, Y . Lin, and S. Shen, “Gradient-based online quadrotor safe trajectory planning in 3d complex environments,” in Proc. of the IEEE/RSJ Intl. Conf. on Intell. Robots and Syst. , 2017
work page 2017
-
[34]
Real-Time Trajectory Replanning for MAVs using Uniform B-splines and a 3D Circular Buffer
V . Usenko, L. von Stumberg, A. Pangercic, and D. Cremers, “Real-time trajectory replanning for mavs using uniform b-splines and 3d circular buffer,” arXiv preprint arXiv:1703.01416 , 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[35]
On the linear quadratic minimum-time problem,
E. Verriest and F. Lewis, “On the linear quadratic minimum-time problem,” IEEE Transactions on Automatic Control , vol. 36, no. 7, pp. 859–863, 1991
work page 1991
-
[36]
A note on two problems in connexion with graphs,
E. W. Dijkstra, “A note on two problems in connexion with graphs,” Numerische mathematik, vol. 1, no. 1, pp. 269–271, 1959
work page 1959
-
[37]
A formal basis for the heuristic determination of minimum cost paths,
P. E. Hart, N. J. Nilsson, and B. Raphael, “A formal basis for the heuristic determination of minimum cost paths,” IEEE transactions on Systems Science and Cybernetics , vol. 4, no. 2, pp. 100–107, 1968
work page 1968
-
[38]
S. J. Russell and P. Norvig, Artificial Intelligence: A Modern Approach . Malaysia; Pearson Education Limited,, 2016
work page 2016
-
[39]
M. Kleinbort, O. Salzman, and D. Halperin, “Collision detection or nearest-neighbor search? on the computational bottleneck in sampling- based motion planning,” arXiv preprint arXiv:1607.04800 , 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[40]
D. P. Bertsekas, D. P. Bertsekas, D. P. Bertsekas, and D. P. Bertsekas, Dynamic Programming and Optimal Control . Athena Scientific Bel- mont, MA, 1995, vol. 1, no. 2
work page 1995
-
[41]
T. H. Cormen, Introduction to Algorithms . MIT press, 2009
work page 2009
-
[42]
Elastic bands: Connecting path planning and control,
S. Quinlan and O. Khatib, “Elastic bands: Connecting path planning and control,” in Proc. of the IEEE Intl. Conf. on Robot. and Autom. IEEE, 1993, pp. 802–807
work page 1993
-
[43]
A convex optimization approach to smooth trajectories for motion planning with car-like robots,
Z. Zhu, E. Schmerling, and M. Pavone, “A convex optimization approach to smooth trajectories for motion planning with car-like robots,” in Proc. of the IEEE Control and Decision Conf. , 2015, pp. 835–842
work page 2015
-
[44]
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
T. Qin, P. Li, and S. Shen, “VINS-mono: A robust and versatile monoc- ular visual-inertial state estimator,” arXiv preprint arXiv:1708.03852 , 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[45]
Quadtree-accelerated real-time monoc- ular dense mapping,
K. Wang, W. Ding, and S. Shen, “Quadtree-accelerated real-time monoc- ular dense mapping,” in Proc. of the IEEE/RSJ Intl. Conf. on Intell. Robots and Syst. IEEE, 2018
work page 2018
-
[46]
Dual-fisheye omnidirectional stereo,
W. Gao and S. Shen, “Dual-fisheye omnidirectional stereo,” in Proc. of the IEEE/RSJ Intl. Conf. on Intell. Robots and Syst. IEEE, 2017, pp. 6715–6722
work page 2017
-
[47]
Optimal time allocation for quadrotor trajectory generation,
F. Gao, W. Wu, J. Pan, B. Zhou, and S. Shen, “Optimal time allocation for quadrotor trajectory generation,” in Proc. of the IEEE/RSJ Intl. Conf. on Intell. Robots and Syst. IEEE, 2018
work page 2018
-
[48]
S. G. Johnson, The NLopt nonlinear-optimization package , 2011. [Online]. Available: http://ab-initio.mit.edu/nlopt Wenchao Ding received his B.Eng. degree in Elec- tronic and Information Engineering from Huazhong University of Science and Technology, China, in
work page 2011
-
[49]
He is currently pursuing his PhD degree in the Hong Kong University of Science and Technology under the supervision of Prof. Shaojie Shen. His research interests include decision making, prediction, motion planning and autonomous navi- gation for aerial robots and autonomous vehicles. Wenliang Gao received his B.Eng. degree in optical engineering from Bei...
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.