Flow with the Force Field: Learning 3D Compliant Flow Matching Policies from Force and Demonstration-Guided Simulation Data
Pith reviewed 2026-05-18 11:04 UTC · model grok-4.3
The pith
A compliant policy trained on force-informed simulation data from one human demonstration enables reliable contact maintenance in real-robot tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
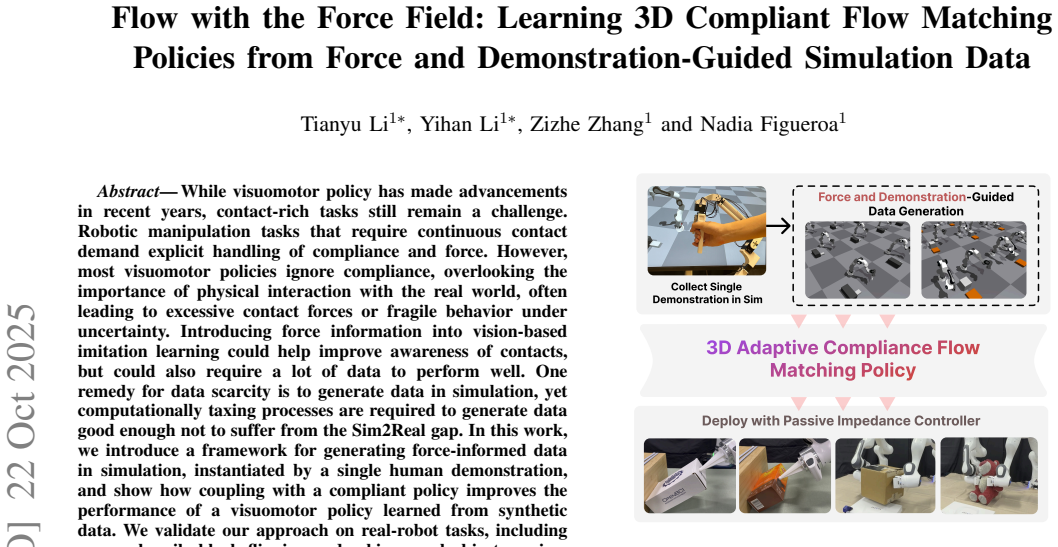
The paper establishes a data-generation framework that turns one human demonstration into force-informed simulation trajectories and shows that a 3D compliant flow matching policy trained on those trajectories, when coupled with a visuomotor policy, yields reliable contact maintenance and adaptation to novel conditions on physical robots performing contact-rich tasks.
What carries the argument
The 3D compliant flow matching policy, which generates force-aware action sequences conditioned on visual observations and simulated force signals derived from demonstration-guided simulation data.
If this is right
- The combined policy maintains steady contact during non-prehensile block flipping on hardware.
- The policy adapts to unseen object configurations during bi-manual transport without losing grip.
- Contact forces remain within safe bounds compared with pure visuomotor baselines.
- Synthetic data from one demonstration suffices to train a policy that generalizes across modest task variations.
Where Pith is reading between the lines
- The same single-demo simulation pipeline could be reused for other contact-rich skills such as peg insertion or surface wiping.
- Integrating the compliant policy as a low-level controller might reduce the amount of real-world fine-tuning needed for new tasks.
- Extending the force simulation to include friction and deformation models could widen the range of objects the policy handles.
Load-bearing premise
Force data produced in simulation from a single human demonstration is realistic enough that policies trained on it transfer to real robots without a large performance drop.
What would settle it
Running the learned policy on the real robot during block flipping with randomized initial poses and measuring whether contact is lost or forces exceed safe limits for more than a small fraction of trials would directly test the central claim.
Figures





read the original abstract
While visuomotor policy has made advancements in recent years, contact-rich tasks still remain a challenge. Robotic manipulation tasks that require continuous contact demand explicit handling of compliance and force. However, most visuomotor policies ignore compliance, overlooking the importance of physical interaction with the real world, often leading to excessive contact forces or fragile behavior under uncertainty. Introducing force information into vision-based imitation learning could help improve awareness of contacts, but could also require a lot of data to perform well. One remedy for data scarcity is to generate data in simulation, yet computationally taxing processes are required to generate data good enough not to suffer from the Sim2Real gap. In this work, we introduce a framework for generating force-informed data in simulation, instantiated by a single human demonstration, and show how coupling with a compliant policy improves the performance of a visuomotor policy learned from synthetic data. We validate our approach on real-robot tasks, including non-prehensile block flipping and a bi-manual object moving, where the learned policy exhibits reliable contact maintenance and adaptation to novel conditions. Project Website: https://flow-with-the-force-field.github.io/webpage/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a framework for generating force-informed simulation data from a single human demonstration to train 3D compliant flow-matching policies. These policies are coupled with visuomotor policies learned from synthetic data to address contact-rich robotic manipulation tasks that require compliance and force awareness. The approach is claimed to improve performance over standard visuomotor policies, with validation on real-robot tasks including non-prehensile block flipping and bi-manual object moving, where the policy maintains reliable contact and adapts to novel conditions.
Significance. If the empirical claims hold with supporting metrics, this work could advance imitation learning for contact-rich tasks by offering a data-efficient route to incorporate force and compliance via simulation, potentially reducing reliance on large real-world datasets. The integration of flow matching for generating compliant 3D policies represents a technical contribution that may improve trajectory smoothness and force awareness compared to standard diffusion or behavior cloning approaches.
major comments (2)
- [Abstract and Experiments] Abstract and Experiments section: The central claim of performance improvement via coupling a compliant policy with a visuomotor policy learned from synthetic data rests on real-robot validation, yet the abstract (and by extension the manuscript summary) supplies no quantitative metrics, baselines, success rates, force error analysis, or statistical comparisons; without these, the improvement over non-compliant policies cannot be assessed and is load-bearing for the contribution.
- [Data Generation / Simulation Framework] Data generation and Sim2Real discussion (likely §3 or §4): The framework relies on force-informed data from a single human demonstration in simulation; this raises a correctness risk for the adaptation claim because limited coverage of mass, friction, and perturbation variability may not close the domain gap for contact dynamics, and no ablation or sensitivity analysis on demonstration count or physics parameter variation is referenced to support robustness.
minor comments (2)
- [Method] Notation for the flow-matching objective and compliant action representation could be clarified with an explicit equation relating force inputs to the vector field.
- [Abstract] The project website is referenced but the manuscript would benefit from a brief summary of supplementary videos or code availability to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below, clarifying the empirical support and framework details while making targeted revisions to improve clarity and robustness.
read point-by-point responses
-
Referee: [Abstract and Experiments] Abstract and Experiments section: The central claim of performance improvement via coupling a compliant policy with a visuomotor policy learned from synthetic data rests on real-robot validation, yet the abstract (and by extension the manuscript summary) supplies no quantitative metrics, baselines, success rates, force error analysis, or statistical comparisons; without these, the improvement over non-compliant policies cannot be assessed and is load-bearing for the contribution.
Authors: We agree that the abstract would benefit from explicit quantitative metrics to allow immediate assessment of the claimed improvements. The experiments section already reports success rates, baseline comparisons (including non-compliant visuomotor policies), force error metrics, and statistical results across multiple trials for the block flipping and bi-manual tasks. In the revision, we have updated the abstract to summarize these key results (e.g., success rates and force adaptation improvements) and added a concise comparison table in the main experiments section for easier reference. revision: yes
-
Referee: [Data Generation / Simulation Framework] Data generation and Sim2Real discussion (likely §3 or §4): The framework relies on force-informed data from a single human demonstration in simulation; this raises a correctness risk for the adaptation claim because limited coverage of mass, friction, and perturbation variability may not close the domain gap for contact dynamics, and no ablation or sensitivity analysis on demonstration count or physics parameter variation is referenced to support robustness.
Authors: The single-demonstration design is intentional for data efficiency, with force-informed simulation generating diverse contact-rich trajectories through randomized perturbations during rollout. This approach helps mitigate the Sim2Real gap by explicitly modeling force and compliance. We acknowledge that additional sensitivity analysis would strengthen the robustness claims. In the revised manuscript, we have added an ablation study varying demonstration count (1 vs. multiple) and physics parameters (mass, friction, external perturbations), with results showing maintained contact reliability and only marginal gains beyond one demonstration. The Sim2Real discussion in §4 has also been expanded with these findings. revision: yes
Circularity Check
No significant circularity; claims rest on empirical real-robot validation
full rationale
The paper proposes a simulation-based framework for generating force-informed data from a single human demonstration, then couples it with a compliant flow-matching policy to enhance visuomotor performance on contact-rich tasks. All central claims are supported by hardware experiments (non-prehensile block flipping, bi-manual object moving) demonstrating contact maintenance and adaptation. No mathematical derivations, equations, or predictions are presented that reduce by construction to fitted parameters or self-referential definitions. The approach is self-contained via external real-robot benchmarks rather than internal loops or self-citation load-bearing steps.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We introduce a framework for generating force-informed data in simulation, instantiated by a single human demonstration, and show how coupling with a compliant policy improves the performance of a visuomotor policy learned from synthetic data.
-
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We design an Adaptive Compliant Flow Matching policy that uses point cloud and force as inputs and outputs pose actions and impedance parameters.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Diffusion policy: Visuomotor policy learning via ac- tion diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via ac- tion diffusion,”The International Journal of Robotics Research, p. 02783649241273668, 2023
work page 2023
-
[2]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn, “Learning fine-grained bimanual manipulation with low-cost hardware,”arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[3]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Hausman, B. Ichteret al., “π 0: A vision- language-action flow model for general robot control,”arXiv preprint arXiv:2410.24164, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[4]
Adaptive compliance policy: Learning approximate compliance for diffusion guided control,
Y . Hou, Z. Liu, C. Chi, E. Cousineau, N. Kuppuswamy, S. Feng, B. Burchfiel, and S. Song, “Adaptive compliance policy: Learning approximate compliance for diffusion guided control,”arXiv preprint arXiv:2410.09309, 2024
-
[5]
C. Chen, Z. Yu, H. Choi, M. Cutkosky, and J. Bohg, “Dexforce: Extracting force-informed actions from kinesthetic demonstrations for dexterous manipulation,”IEEE Robotics and Automation Letters, 2025
work page 2025
-
[6]
Learning diffusion policies from demonstrations for compliant contact-rich manipulation,
M. Aburub, C. C. Beltran-Hernandez, T. Kamijo, and M. Hamaya, “Learning diffusion policies from demonstrations for compliant contact-rich manipulation,” 2024. [Online]. Available: https://arxiv. org/abs/2410.19235
-
[7]
Hybrid trajectory and force learning of complex assembly tasks: A combined learning framework,
Y . Wang, C. C. Beltran-Hernandez, W. Wan, and K. Harada, “Hybrid trajectory and force learning of complex assembly tasks: A combined learning framework,”IEEE Access, vol. 9, pp. 60 175–60 186, 2021
work page 2021
-
[8]
Scape: Learning stiffness control from augmented position control experiences,
M. Kim, S. Niekum, and A. Deshpande, “Scape: Learning stiffness control from augmented position control experiences,” inConference on Robot Learning. Proceedings of Machine Learning Research, 2021
work page 2021
-
[9]
Factr: Force-attending curriculum training for contact-rich policy learning,
J. J. Liu, Y . Li, K. Shaw, T. Tao, R. Salakhutdinov, and D. Pathak, “Factr: Force-attending curriculum training for contact-rich policy learning,”arXiv preprint arXiv:2502.17432, 2025
-
[10]
A dynamical system approach to motion and force generation in contact tasks
W. Amanhoud, M. Khoramshahi, and A. Billard, “A dynamical system approach to motion and force generation in contact tasks.” inRobotics: Science and Systems, vol. 2019, 2019
work page 2019
-
[11]
Force adaptation in contact tasks with dynamical systems,
W. Amanhoud, M. Khoramshahi, M. Bonnesoeur, and A. Billard, “Force adaptation in contact tasks with dynamical systems,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 6841–6847
work page 2020
-
[12]
Spatial adaption of robot trajectories based on laplacian trajectory editing,
T. Nierhoff, S. Hirche, and Y . Nakamura, “Spatial adaption of robot trajectories based on laplacian trajectory editing,”Autonomous Robots, vol. 40, no. 1, pp. 159–173, 2016
work page 2016
-
[13]
Task generalization with stability guarantees via elastic dynamical system motion policies,
T. Li and N. Figueroa, “Task generalization with stability guarantees via elastic dynamical system motion policies,” in7th Annual Confer- ence on Robot Learning, 2023
work page 2023
-
[14]
T. Li, S. Sun, S. S. Aditya, and N. Figueroa, “Elastic motion policy: An adaptive dynamical system for robust and efficient one-shot imitation learning,”arXiv preprint arXiv:2503.08029, 2025
-
[15]
3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations,
Y . Ze, G. Zhang, K. Zhang, C. Hu, M. Wang, and H. Xu, “3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations,” inProceedings of Robotics: Science and Systems (RSS), 2024
work page 2024
-
[16]
E. Chisari, N. Heppert, M. Argus, T. Welschehold, T. Brox, and A. Valada, “Learning robotic manipulation policies from point clouds with conditional flow matching,”arXiv preprint arXiv:2409.07343, 2024
-
[17]
Flow straight and fast: Learning to generate and transfer data with rectified flow,
X. Liu, C. Gonget al., “Flow straight and fast: Learning to generate and transfer data with rectified flow,” inThe Eleventh International Conference on Learning Representations
-
[18]
Q. Zhang, Z. Liu, H. Fan, G. Liu, B. Zeng, and S. Liu, “Flowpol- icy: Enabling fast and robust 3d flow-based policy via consistency flow matching for robot manipulation,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 39, no. 14, 2025
work page 2025
-
[19]
Passive interaction control with dynam- ical systems,
K. Kronander and A. Billard, “Passive interaction control with dynam- ical systems,”IEEE Robotics and Automation Letters, vol. 1, no. 1, pp. 106–113, 2015
work page 2015
-
[20]
A. Billard, S. S. Mirrazavi Salehian, and N. Figueroa,Learning for Adaptive and Reactive Robot Control: A Dynamical Systems Approach. Cambridge, USA: MIT Press, 2022
work page 2022
-
[21]
Foar: Force-aware reactive policy for contact-rich robotic manipulation,
Z. He, H. Fang, J. Chen, H.-S. Fang, and C. Lu, “Foar: Force-aware reactive policy for contact-rich robotic manipulation,”IEEE Robotics and Automation Letters, 2025
work page 2025
-
[22]
H. Xue, J. Ren, W. Chen, G. Zhang, Y . Fang, G. Gu, H. Xu, and C. Lu, “Reactive diffusion policy: Slow-fast visual-tactile policy learning for contact-rich manipulation,”arXiv preprint arXiv:2503.02881, 2025
-
[23]
W. Liu, J. Wang, Y . Wang, W. Wang, and C. Lu, “Forcemimic: Force-centric imitation learning with force-motion capture system for contact-rich manipulation,”arXiv preprint arXiv:2410.07554, 2024
-
[24]
R. Mart ´ın-Mart´ın, M. A. Lee, R. Gardner, S. Savarese, J. Bohg, and A. Garg, “Variable impedance control in end-effector space: An action space for reinforcement learning in contact-rich tasks,” in2019 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2019, pp. 1010–1017
work page 2019
-
[25]
Learning variable impedance control via inverse reinforcement learning for force-related tasks,
X. Zhang, L. Sun, Z. Kuang, and M. Tomizuka, “Learning variable impedance control via inverse reinforcement learning for force-related tasks,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2225– 2232, 2021
work page 2021
-
[26]
Physics-driven data generation for contact-rich manipulation via trajectory optimization,
L. Yang, H. T. Suh, T. Zhao, B. P. Græsdal, T. Kelestemur, J. Wang, T. Pang, and R. Tedrake, “Physics-driven data generation for contact-rich manipulation via trajectory optimization,”arXiv preprint arXiv:2502.20382, 2025
-
[27]
Learning contact- rich whole-body manipulation with example-guided reinforcement learning,
J. A. Barreiros, A. ¨O. ¨Onol, M. Zhang, S. Creasey, A. Goncalves, A. Beaulieu, A. Bhat, K. M. Tsui, and A. Alspach, “Learning contact- rich whole-body manipulation with example-guided reinforcement learning,”Science Robotics, vol. 10, no. 105, p. eads6790, 2025
work page 2025
-
[28]
Point cloud models improve visual robustness in robotic learners,
S. Peri, I. Lee, C. Kim, L. Fuxin, T. Hermans, and S. Lee, “Point cloud models improve visual robustness in robotic learners,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 17 529–17 536
work page 2024
-
[29]
Demogen: Synthetic demonstration generation for data-efficient visuomotor pol- icy learning,
Z. Xue, S. Deng, Z. Chen, Y . Wang, Z. Yuan, and H. Xu, “Demogen: Synthetic demonstration generation for data-efficient visuomotor pol- icy learning,”arXiv preprint arXiv:2502.16932, 2025
-
[30]
Forge: Force-guided exploration for robust contact-rich manipulation under uncertainty,
M. Noseworthy, B. Tang, B. Wen, A. Handa, C. Kessens, N. Roy, D. Fox, F. Ramos, Y . Narang, and I. Akinola, “Forge: Force-guided exploration for robust contact-rich manipulation under uncertainty,” IEEE Robotics and Automation Letters, 2025
work page 2025
-
[31]
Dywa: Dynamics-adaptive world action model for generalizable non- prehensile manipulation,
J. Lyu, Z. Li, X. Shi, C. Xu, Y . Wang, and H. Wang, “Dywa: Dynamics-adaptive world action model for generalizable non- prehensile manipulation,”arXiv preprint arXiv:2503.16806, 2025
-
[32]
Dexpoint: Gener- alizable point cloud reinforcement learning for sim-to-real dexterous manipulation,
Y . Qin, B. Huang, Z.-H. Yin, H. Su, and X. Wang, “Dexpoint: Gener- alizable point cloud reinforcement learning for sim-to-real dexterous manipulation,”Conference on Robot Learning (CoRL), 2022
work page 2022
-
[33]
Dextrah-g: Pixels- to-action dexterous arm-hand grasping with geometric fabrics,
T. G. W. Lum, M. Matak, V . Makoviychuk, A. Handa, A. Allshire, T. Hermans, N. D. Ratliff, and K. Van Wyk, “Dextrah-g: Pixels- to-action dexterous arm-hand grasping with geometric fabrics,” in Conference on Robot Learning. PMLR, 2025, pp. 3182–3211
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.