Geometry-Aware Scene Configurations for Novel View Synthesis
Pith reviewed 2026-05-18 07:30 UTC · model grok-4.3
The pith
Geometric priors guide adaptive base placement in scalable NeRFs to improve indoor novel view synthesis over uniform arrangements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
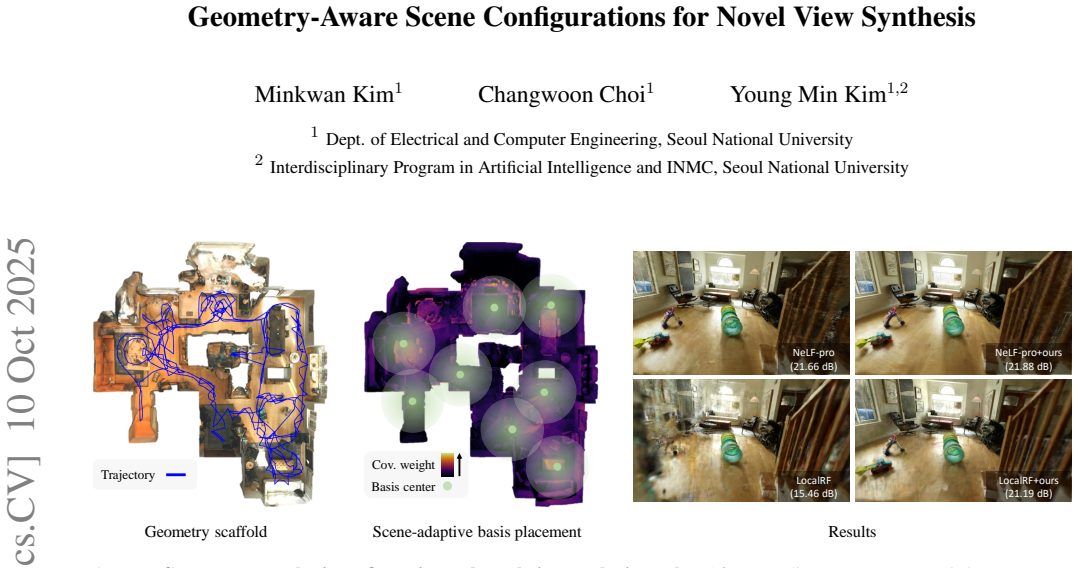
The central claim is that recording observation statistics on the estimated geometric scaffold and using them to guide optimal placement of bases in scalable NeRF representations greatly improves upon uniform basis arrangements, while scene-adaptive virtual viewpoints compensate for geometric deficiencies in the input trajectory; comprehensive analysis in large indoor scenes demonstrates significant enhancements in rendering quality and memory requirements compared to regular-placement baselines.
What carries the argument
Observation statistics recorded on an estimated geometric scaffold that guide adaptive placement of representation bases and selection of virtual viewpoints.
If this is right
- Adaptive base placement utilizes limited resources more effectively in irregular multi-room layouts with varying complexity.
- Scene-adaptive virtual viewpoints impose regularization that compensates for deficiencies in the original input trajectory.
- Overall memory requirements decrease while rendering quality rises compared with regular-placement baselines.
- The method handles clutter, occlusion, and flat walls more robustly than uniform configurations.
Where Pith is reading between the lines
- The same observation-statistic principle could be tested on outdoor or dynamic scenes once reliable geometric scaffolds become available.
- Integration with denser input capture or multi-view stereo priors might further reduce the number of required bases.
- Memory savings could enable deployment on resource-constrained devices for immersive VR walkthroughs of real indoor spaces.
Load-bearing premise
Geometric priors estimated after pre-processing stages are accurate and reliable enough to guide optimal basis placement and virtual viewpoint selection without introducing errors in cluttered or occluded indoor scenes.
What would settle it
A direct side-by-side rendering comparison on a cluttered indoor scene with heavy occlusion where the geometry-guided adaptive placement produces lower PSNR or visible artifacts relative to a uniform baseline of the same memory budget.
Figures



















read the original abstract
We propose scene-adaptive strategies to efficiently allocate representation capacity for generating immersive experiences of indoor environments from incomplete observations. Indoor scenes with multiple rooms often exhibit irregular layouts with varying complexity, containing clutter, occlusion, and flat walls. We maximize the utilization of limited resources with guidance from geometric priors, which are often readily available after pre-processing stages. We record observation statistics on the estimated geometric scaffold and guide the optimal placement of bases, which greatly improves upon the uniform basis arrangements adopted by previous scalable Neural Radiance Field (NeRF) representations. We also suggest scene-adaptive virtual viewpoints to compensate for geometric deficiencies inherent in view configurations in the input trajectory and impose the necessary regularization. We present a comprehensive analysis and discussion regarding rendering quality and memory requirements in several large-scale indoor scenes, demonstrating significant enhancements compared to baselines that employ regular placements. Project page is available at: https://mkjjang3598.github.io/Geo-Scene-Config.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes scene-adaptive strategies for novel view synthesis in indoor environments using scalable NeRF representations. It records observation statistics on an estimated geometric scaffold derived from pre-processing to guide non-uniform optimal placement of bases, improving upon uniform grid arrangements in prior work. The approach also introduces scene-adaptive virtual viewpoints to compensate for deficiencies in input trajectories and provides regularization. The authors claim significant gains in rendering quality and reduced memory requirements, supported by analysis on several large-scale indoor scenes with clutter, occlusion, and irregular layouts.
Significance. If the central claims hold with proper validation, the work could meaningfully advance efficient NeRF deployment for complex indoor scenes by showing how readily available geometric priors enable better capacity allocation than fixed regular placements. This addresses practical challenges in resource-limited immersive rendering and could influence follow-on methods that incorporate scene geometry for adaptive representations.
major comments (2)
- Abstract: The central claim of 'significant enhancements' and 'greatly improves upon the uniform basis arrangements' is load-bearing but unsupported, as the abstract (and visible description) contains no quantitative results, error metrics, ablation studies, or validation procedures to demonstrate the improvement magnitude or reliability.
- Method (geometric scaffold and basis placement): The improvement over prior scalable NeRFs rests on the assumption that observation statistics from the pre-processed geometric scaffold produce superior non-uniform base placement; however, no robustness analysis or failure-case experiments are described for the cluttered, occluded, or flat-wall indoor scenes explicitly flagged in the introduction, leaving open the risk that estimation errors propagate directly into misplaced bases.
minor comments (2)
- Introduction: The description of how geometric priors transition to virtual viewpoint selection could be expanded with a short diagram or pseudocode for clarity.
- Project page reference: The link is provided but the manuscript should explicitly state which supplementary materials (e.g., additional quantitative tables) are hosted there to aid reviewers.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the recommendation for major revision. We address each major comment below, indicating where revisions will be made to strengthen the presentation of our results and method.
read point-by-point responses
-
Referee: [—] Abstract: The central claim of 'significant enhancements' and 'greatly improves upon the uniform basis arrangements' is load-bearing but unsupported, as the abstract (and visible description) contains no quantitative results, error metrics, ablation studies, or validation procedures to demonstrate the improvement magnitude or reliability.
Authors: We agree that the abstract would benefit from explicit quantitative support for the claimed improvements. The full manuscript reports quantitative comparisons of rendering quality (PSNR, SSIM) and memory usage against uniform grid baselines across multiple large indoor scenes. In the revised version we will update the abstract to include representative numerical results from these experiments. revision: yes
-
Referee: [—] Method (geometric scaffold and basis placement): The improvement over prior scalable NeRFs rests on the assumption that observation statistics from the pre-processed geometric scaffold produce superior non-uniform base placement; however, no robustness analysis or failure-case experiments are described for the cluttered, occluded, or flat-wall indoor scenes explicitly flagged in the introduction, leaving open the risk that estimation errors propagate directly into misplaced bases.
Authors: The experiments section evaluates the method on large-scale indoor scenes that contain clutter, occlusion, and irregular layouts, with results showing consistent gains over uniform placements. We acknowledge that the current manuscript does not provide dedicated robustness analysis or explicit failure-case studies for errors in the geometric scaffold estimation. We will add a discussion of potential limitations and sensitivity to scaffold accuracy in the revised manuscript. revision: partial
Circularity Check
No circularity: geometric priors are external pre-processing input, placement heuristic is independent design choice
full rationale
The paper's core proposal records observation statistics from a separately estimated geometric scaffold (obtained via pre-processing) to inform non-uniform base placement and scene-adaptive viewpoints. This is a methodological heuristic applied to an external input rather than a derivation that reduces the final rendering claim or capacity allocation back to fitted parameters by construction. No equations or self-citations in the provided text create a self-definitional loop, fitted-input prediction, or load-bearing uniqueness theorem. The improvement over uniform grids is presented as an empirical outcome evaluated on indoor scenes, not a tautological renaming or ansatz smuggled via prior author work. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Barron, Ben Mildenhall, Dor Verbin, Pratul P
Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, and Peter Hedman. Mip-nerf 360: Unbounded anti-aliased neural radiance fields.CVPR, 2022. 1, 4, 5, 6
work page 2022
-
[2]
Barron, Ben Mildenhall, Dor Verbin, Pratul P
Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, and Peter Hedman. Zip-nerf: Anti-aliased grid- based neural radiance fields.ICCV, 2023. 2, 5, 6, 7, 8, 12, 14, 15, 16, 17, 18, 19, 21
work page 2023
-
[3]
ZoeDepth: Zero-shot Transfer by Combining Relative and Metric Depth
Shariq Farooq Bhat, Reiner Birkl, Diana Wofk, Peter Wonka, and Matthias M ¨uller. Zoedepth: Zero-shot trans- fer by combining relative and metric depth.arXiv preprint arXiv:2302.12288, 2023. 3
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[4]
Nope-nerf: Optimising neu- ral radiance field with no pose prior
Wenjing Bian, Zirui Wang, Kejie Li, Jia-Wang Bian, and Victor Adrian Prisacariu. Nope-nerf: Optimising neu- ral radiance field with no pose prior. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4160–4169, 2023. 3
work page 2023
-
[5]
Gary Bradski. The opencv library.Dr. Dobb’s Journal: Soft- ware Tools for the Professional Programmer, 25(11):120– 123, 2000. 15
work page 2000
-
[6]
Tensorf: Tensorial radiance fields
Anpei Chen, Zexiang Xu, Andreas Geiger, Jingyi Yu, and Hao Su. Tensorf: Tensorial radiance fields. InEuropean Conference on Computer Vision (ECCV), 2022. 4
work page 2022
-
[7]
Bal- anced spherical grid for egocentric view synthesis
Changwoon Choi, Sang Min Kim, and Young Min Kim. Bal- anced spherical grid for egocentric view synthesis. InPro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 16590–16599, 2023. 1
work page 2023
-
[8]
Dongyoung Choi, Hyeonjoong Jang, and Min H. Kim. Om- nilocalrf: Omnidirectional local radiance fields from dy- namic videos. InIEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024. 2, 4
work page 2024
-
[9]
Depth-supervised NeRF: Fewer views and faster training for free
Kangle Deng, Andrew Liu, Jun-Yan Zhu, and Deva Ra- manan. Depth-supervised NeRF: Fewer views and faster training for free. InProceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition (CVPR),
-
[10]
Omnidata: A scalable pipeline for making multi- task mid-level vision datasets from 3d scans
Ainaz Eftekhar, Alexander Sax, Jitendra Malik, and Amir Zamir. Omnidata: A scalable pipeline for making multi- task mid-level vision datasets from 3d scans. InProceedings of the IEEE/CVF International Conference on Computer Vi- sion, pages 10786–10796, 2021. 15, 16
work page 2021
-
[11]
A generic and flexible regularization framework for nerfs
Thibaud Ehret, Roger Mar ´ı, and Gabriele Facciolo. A generic and flexible regularization framework for nerfs. In Proceedings of the IEEE/CVF Winter Conference on Ap- plications of Computer Vision (WACV), pages 3088–3097,
-
[12]
Plenoxels: Radiance fields without neural networks
Sara Fridovich-Keil, Alex Yu, Matthew Tancik, Qinhong Chen, Benjamin Recht, and Angjoo Kanazawa. Plenoxels: Radiance fields without neural networks. InCVPR, 2022. 1, 2, 16
work page 2022
-
[13]
Guangcong, Zhaoxi Chen, Chen Change Loy, and Ziwei Liu. Sparsenerf: Distilling depth ranking for few-shot novel view synthesis.IEEE/CVF International Conference on Computer Vision (ICCV), 2023. 2, 3, 6, 15
work page 2023
-
[14]
Neural 3d scene reconstruction with the manhattan-world assumption
Haoyu Guo, Sida Peng, Haotong Lin, Qianqian Wang, Guofeng Zhang, Hujun Bao, and Xiaowei Zhou. Neural 3d scene reconstruction with the manhattan-world assumption. InCVPR, 2022. 3
work page 2022
-
[15]
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk ¨uhler, and George Drettakis. 3d gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics, 42 (4), 2023. 6, 7, 16, 20
work page 2023
-
[16]
Bernhard Kerbl, Andreas Meuleman, Georgios Kopanas, Michael Wimmer, Alexandre Lanvin, and George Drettakis. A hierarchical 3d gaussian representation for real-time ren- dering of very large datasets.ACM Transactions on Graph- ics, 43(4), 2024. 6, 7, 16, 17
work page 2024
-
[17]
Arno Knapitsch, Jaesik Park, Qian-Yi Zhou, and Vladlen Koltun. Tanks and temples: Benchmarking large-scale scene reconstruction.ACM Transactions on Graphics, 36(4), 2017. 16
work page 2017
-
[18]
Improving NeRF Quality by Progressive Camera Placement for Free- Viewpoint Navigation
Georgios Kopanas and George Drettakis. Improving NeRF Quality by Progressive Camera Placement for Free- Viewpoint Navigation. InVision, Modeling, and Visualiza- tion. The Eurographics Association, 2023. 2, 14
work page 2023
-
[19]
Jiahe Li, Jiawei Zhang, Xiao Bai, Jin Zheng, Xin Ning, Jun Zhou, and Lin Gu. Dngaussian: Optimizing sparse-view 3d gaussian radiance fields with global-local depth normaliza- tion.arXiv preprint arXiv:2403.06912, 2024. 6, 7, 16
-
[20]
NeRF-XL: Scaling nerfs with multiple GPUs
Ruilong Li, Sanja Fidler, Angjoo Kanazawa, and Francis Williams. NeRF-XL: Scaling nerfs with multiple GPUs. In European Conference on Computer Vision (ECCV), 2024. 2, 4
work page 2024
-
[21]
Yiyi Liao, Jun Xie, and Andreas Geiger. KITTI-360: A novel dataset and benchmarks for urban scene understanding in 2d and 3d.Pattern Analysis and Machine Intelligence (PAMI),
-
[22]
Neural sparse voxel fields.NeurIPS,
Lingjie Liu, Jiatao Gu, Kyaw Zaw Lin, Tat-Seng Chua, and Christian Theobalt. Neural sparse voxel fields.NeurIPS,
-
[23]
William E. Lorensen and Harvey E. Cline. Marching cubes: A high resolution 3d surface construction algorithm. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, page 163–169, New York, NY , USA, 1987. Association for Computing Machin- ery. 4
work page 1987
-
[24]
Julien N. P. Martel, David B. Lindell, Connor Z. Lin, Eric R. Chan, Marco Monteiro, and Gordon Wetzstein. Acorn: Adaptive coordinate networks for neural scene representa- tion.ACM Trans. Graph. (SIGGRAPH), 40(4), 2021. 2
work page 2021
-
[25]
Andreas Meuleman, Yu-Lun Liu, Chen Gao, Jia-Bin Huang, Changil Kim, Min H. Kim, and Johannes Kopf. Progres- sively optimized local radiance fields for robust view synthe- sis. InCVPR, 2023. 2, 4, 6, 7, 8, 16, 17, 21
work page 2023
-
[26]
Srinivasan, Rodrigo Ortiz-Cayon, Nima Khademi Kalantari, Ravi Ramamoorthi, Ren Ng, and Abhishek Kar
Ben Mildenhall, Pratul P. Srinivasan, Rodrigo Ortiz-Cayon, Nima Khademi Kalantari, Ravi Ramamoorthi, Ren Ng, and Abhishek Kar. Local light field fusion: Practical view syn- thesis with prescriptive sampling guidelines.ACM Transac- tions on Graphics (TOG), 2019. 6
work page 2019
-
[27]
Srinivasan, Matthew Tancik, Jonathan T
Ben Mildenhall, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: 9 Representing scenes as neural radiance fields for view syn- thesis. InECCV, 2020. 1, 6
work page 2020
-
[28]
Instant neural graphics primitives with a multires- olution hash encoding.ACM Trans
Thomas M ¨uller, Alex Evans, Christoph Schied, and Alexan- der Keller. Instant neural graphics primitives with a multires- olution hash encoding.ACM Trans. Graph., 41(4):102:1– 102:15, 2022. 1, 5
work page 2022
-
[29]
Barron, Ben Mildenhall, Mehdi S
Michael Niemeyer, Jonathan T. Barron, Ben Mildenhall, Mehdi S. M. Sajjadi, Andreas Geiger, and Noha Radwan. Regnerf: Regularizing neural radiance fields for view syn- thesis from sparse inputs. InProc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), 2022. 2, 8, 15
work page 2022
-
[30]
Ac- tivenerf: Learning where to see with uncertainty estimation
Xuran Pan, Zihang Lai, Shiji Song, and Gao Huang. Ac- tivenerf: Learning where to see with uncertainty estimation. InComputer Vision–ECCV 2022: 17th European Confer- ence, Tel Aviv, Israel, October 23–27, 2022, Proceedings, Part XXXIII, pages 230–246. Springer, 2022. 2, 14
work page 2022
-
[31]
Vi- sion transformers for dense prediction.ICCV, 2021
Ren ´e Ranftl, Alexey Bochkovskiy, and Vladlen Koltun. Vi- sion transformers for dense prediction.ICCV, 2021. 3, 8, 16
work page 2021
-
[32]
Ren ´e Ranftl, Katrin Lasinger, David Hafner, Konrad Schindler, and Vladlen Koltun. Towards robust monocular depth estimation: Mixing datasets for zero-shot cross-dataset transfer.IEEE Transactions on Pattern Analysis and Ma- chine Intelligence, 44(3), 2022. 3, 16
work page 2022
-
[33]
Barron, Ben Mildenhall, Pratul P
Barbara Roessle, Jonathan T. Barron, Ben Mildenhall, Pratul P. Srinivasan, and Matthias Nießner. Dense depth pri- ors for neural radiance fields from sparse input views. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), 2022. 2, 3
work page 2022
-
[34]
K-planes: Explicit radiance fields in space, time, and appearance
Sara Fridovich-Keil and Giacomo Meanti, Frederik Rahbæk Warburg, Benjamin Recht, and Angjoo Kanazawa. K-planes: Explicit radiance fields in space, time, and appearance. In CVPR, 2023. 1
work page 2023
-
[35]
Structure-from-motion revisited
Johannes Lutz Sch ¨onberger and Jan-Michael Frahm. Structure-from-motion revisited. InConference on Com- puter Vision and Pattern Recognition (CVPR), 2016. 1, 3, 15
work page 2016
-
[36]
ViP-NeRF: Visibility prior for sparse input neural radiance fields.ACM Trans
Nagabhushan Somraj and Rajiv Soundararajan. ViP-NeRF: Visibility prior for sparse input neural radiance fields.ACM Trans. Graph., 2023. 2
work page 2023
-
[37]
Direct voxel grid optimization: Super-fast convergence for radiance fields reconstruction
Cheng Sun, Min Sun, and Hwann-Tzong Chen. Direct voxel grid optimization: Super-fast convergence for radiance fields reconstruction. InCVPR, 2022. 1
work page 2022
-
[38]
Matthew Tancik, Vincent Casser, Xinchen Yan, Sabeek Prad- han, Ben Mildenhall, Pratul P. Srinivasan, Jonathan T. Bar- ron, and Henrik Kretzschmar. Block-nerf: Scalable large scene neural view synthesis.arXiv, 2022. 2, 4
work page 2022
-
[39]
Nerfstudio: A modular framework for neural radiance field development
Matthew Tancik, Ethan Weber, Evonne Ng, Ruilong Li, Brent Yi, Justin Kerr, Terrance Wang, Alexander Kristof- fersen, Jake Austin, Kamyar Salahi, Abhik Ahuja, David McAllister, and Angjoo Kanazawa. Nerfstudio: A modular framework for neural radiance field development. InACM SIGGRAPH 2023 Conference Proceedings, 2023. 5, 6, 7, 16, 20
work page 2023
-
[40]
Mega-nerf: Scalable construction of large- scale nerfs for virtual fly-throughs
Haithem Turki, Deva Ramanan, and Mahadev Satya- narayanan. Mega-nerf: Scalable construction of large- scale nerfs for virtual fly-throughs. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 12922–12931, 2022. 2, 4, 6, 7, 16, 21
work page 2022
-
[41]
Scade: Nerfs from space carving with ambiguity-aware depth estimates
Mikaela Angelina Uy, Ricardo Martin-Brualla, Leonidas Guibas, and Ke Li. Scade: Nerfs from space carving with ambiguity-aware depth estimates. InConference on Com- puter Vision and Pattern Recognition (CVPR), 2023. 2, 3
work page 2023
-
[42]
NeuS: Learning Neural Implicit Surfaces by Volume Rendering for Multi-view Reconstruction
Peng Wang, Lingjie Liu, Yuan Liu, Christian Theobalt, Taku Komura, and Wenping Wang. Neus: Learning neural implicit surfaces by volume rendering for multi-view reconstruction. arXiv preprint arXiv:2106.10689, 2021. 3
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[43]
DiffusioNeRF: Regularizing Neural Radiance Fields with Denoising Diffu- sion Models
Jamie Wynn and Daniyar Turmukhambetov. DiffusioNeRF: Regularizing Neural Radiance Fields with Denoising Diffu- sion Models. InCVPR, 2023. 8
work page 2023
-
[44]
Nerf director: Revisiting view selection in neural vol- ume rendering
Wenhui Xiao, Rodrigo Santa Cruz, David Ahmedt- Aristizabal, Olivier Salvado, Clinton Fookes, and Leo Le- brat. Nerf director: Revisiting view selection in neural vol- ume rendering. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024. 2, 5, 14
work page 2024
-
[45]
Neural visibility field for uncertainty-driven active mapping
Shangjie Xue, Jesse Dill, Pranay Mathur, Frank Dellaert, Panagiotis Tsiotra, and Danfei Xu. Neural visibility field for uncertainty-driven active mapping. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 18122–18132, 2024. 2
work page 2024
-
[46]
Ner- fvs: Neural radiance fields for free view synthesis via geom- etry scaffolds
Chen Yang, Peihao Li, Zanwei Zhou, Shanxin Yuan, Bing- bing Liu, Xiaokang Yang, Weichao Qiu, and Wei Shen. Ner- fvs: Neural radiance fields for free view synthesis via geom- etry scaffolds. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 16549– 16558, 2023. 3, 5
work page 2023
-
[47]
V olume rendering of neural implicit surfaces
Lior Yariv, Jiatao Gu, Yoni Kasten, and Yaron Lipman. V olume rendering of neural implicit surfaces. InThirty- Fifth Conference on Neural Information Processing Systems,
-
[48]
Scannet++: A high-fidelity dataset of 3d indoor scenes
Chandan Yeshwanth, Yueh-Cheng Liu, Matthias Nießner, and Angela Dai. Scannet++: A high-fidelity dataset of 3d indoor scenes. InProceedings of the International Confer- ence on Computer Vision (ICCV), 2023. 2, 5, 6, 8, 12, 13, 14, 15, 17, 18, 19, 20
work page 2023
-
[49]
Nelf-pro: Neural light field probes for multi-scale novel view synthe- sis
Zinuo You, Andreas Geiger, and Anpei Chen. Nelf-pro: Neural light field probes for multi-scale novel view synthe- sis. InConference on Computer Vision and Pattern Recog- nition (CVPR), 2024. 2, 4, 5, 6, 7, 8, 12, 14, 16, 17, 20, 21
work page 2024
-
[50]
PlenOctrees for real-time rendering of neural radiance fields
Alex Yu, Ruilong Li, Matthew Tancik, Hao Li, Ren Ng, and Angjoo Kanazawa. PlenOctrees for real-time rendering of neural radiance fields. InICCV, 2021. 1, 2
work page 2021
-
[51]
Sdfstudio: A unified framework for surface reconstruction, 2022
Zehao Yu, Anpei Chen, Bozidar Antic, Songyou Peng, Apra- tim Bhattacharyya, Michael Niemeyer, Siyu Tang, Torsten Sattler, and Andreas Geiger. Sdfstudio: A unified framework for surface reconstruction, 2022. 5, 15
work page 2022
-
[52]
Zehao Yu, Songyou Peng, Michael Niemeyer, Torsten Sat- tler, and Andreas Geiger. Monosdf: Exploring monocu- lar geometric cues for neural implicit surface reconstruc- tion.Advances in Neural Information Processing Systems (NeurIPS), 2022. 3, 5, 6, 7, 8, 15, 16, 17 10
work page 2022
-
[53]
Nerf++: Analyzing and improving neural radiance fields.arXiv preprint arXiv:2010.07492, 2020
Kai Zhang, Gernot Riegler, Noah Snavely, and Vladlen Koltun. Nerf++: Analyzing and improving neural radiance fields.arXiv preprint arXiv:2010.07492, 2020. 1
-
[54]
Open3D: A Modern Library for 3D Data Processing
Qian-Yi Zhou, Jaesik Park, and Vladlen Koltun. Open3D: A modern library for 3D data processing.arXiv:1801.09847,
work page internal anchor Pith review Pith/arXiv arXiv
-
[55]
Fsgs: Real-time few-shot view synthesis using gaussian splatting
Zehao Zhu, Zhiwen Fan, Yifan Jiang, and Zhangyang Wang. Fsgs: Real-time few-shot view synthesis using gaussian splatting. InEuropean conference on computer vision, pages 145–163. Springer, 2024. 6, 7, 16, 17 11 Geometry-Aware Scene Configurations for Novel View Synthesis Supplementary Material A. Basis Placement Optimization A.1. Algorithms and Optimizati...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.