Constructing the Umwelt: Cognitive Planning through Belief-Intent Co-Evolution
Pith reviewed 2026-05-18 03:11 UTC · model grok-4.3
The pith
An autonomous driving planner can achieve strong performance and develop human-like cognitive abilities by maintaining consistency between its beliefs and intentions instead of building high-fidelity reconstructions of the world.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that by synthesizing relevant cognitive theories into an end-to-end embodied planning system, the Belief-Intent Co-Evolution mechanism produces a self-organizing equilibrium between belief and intent. This achieves semantic alignment between internal representations and world affordances, resulting in enhanced planning performance and emergent human-like cognitive behaviors in closed-loop settings.
What carries the argument
The Belief-Intent Co-Evolution mechanism, which forms a self-organizing equilibrium between state understanding and future prediction through implicit computational replay, serving as the core of the Tokenized Intent World Model.
If this is right
- Planning performance is enhanced through this mechanism in validation tests.
- Closed-loop simulations reveal emergent behaviors like map affordance understanding.
- Free exploration and self-recovery strategies appear without explicit programming.
- Cognitive consistency serves as the primary learning mechanism leading to better semantic alignment.
Where Pith is reading between the lines
- This method might lower the need for extensive sensor data processing in real applications.
- Similar co-evolution principles could be tested in other areas of robotics involving decision making under uncertainty.
- The approach opens the possibility of planning systems that adapt more naturally to changing environments over long periods.
Load-bearing premise
That integrating cognitive science concepts like subjective world models, neural assemblies, and combined causal reasoning into a single embodied system will generate sufficient cognitive consistency to support effective planning without accurate world reconstruction.
What would settle it
A direct comparison in closed-loop driving simulations where the proposed system shows no performance gain and lacks emergent recovery behaviors compared to traditional reconstruction methods would disprove the central claim.
Figures


read the original abstract
This paper challenges a prevailing epistemological assumption in End-to-End Autonomous Driving: that high-performance planning necessitates high-fidelity world reconstruction. Inspired by cognitive science, we propose the Mental Bayesian Causal World Model (MBCWM) and instantiate it as the Tokenized Intent World Model (TIWM), a novel cognitive computing architecture. Its core philosophy posits that intelligence emerges not from pixel-level objective fidelity, but from the Cognitive Consistency between the agent's internal intentional world and physical reality. By synthesizing von Uexk\"ull's $\textit{Umwelt}$ theory, the neural assembly hypothesis, and the triple causal model (integrating symbolic deduction, probabilistic induction, and force dynamics) into an end-to-end embodied planning system, we demonstrate the feasibility of this paradigm on the nuPlan benchmark. Experimental results in open-loop validation confirm that our Belief-Intent Co-Evolution mechanism effectively enhances planning performance. Crucially, in closed-loop simulations, the system exhibits emergent human-like cognitive behaviors, including map affordance understanding, free exploration, and self-recovery strategies. We identify Cognitive Consistency as the core learning mechanism: during long-term training, belief (state understanding) and intent (future prediction) spontaneously form a self-organizing equilibrium through implicit computational replay, achieving semantic alignment between internal representations and physical world affordances. TIWM offers a neuro-symbolic, cognition-first alternative to reconstruction-based planners, establishing a new direction: planning as active understanding, not passive reaction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper proposes the Mental Bayesian Causal World Model (MBCWM) instantiated as the Tokenized Intent World Model (TIWM) for end-to-end autonomous driving planning. It challenges the assumption that high-performance planning requires high-fidelity world reconstruction, instead emphasizing Cognitive Consistency between internal belief (state understanding) and intent (future prediction) achieved via Belief-Intent Co-Evolution. The approach synthesizes von Uexküll's Umwelt theory, the neural assembly hypothesis, and a triple causal model (symbolic deduction, probabilistic induction, force dynamics) into an embodied system, reporting enhanced planning on the nuPlan benchmark in open-loop settings and emergent human-like behaviors (map affordance understanding, free exploration, self-recovery) in closed-loop simulations through implicit computational replay during long-term training.
Significance. If the central claims hold with rigorous evidence, this work could meaningfully advance embodied AI and autonomous driving by offering a neuro-symbolic, cognition-first paradigm that prioritizes semantic alignment over pixel-level fidelity. The self-organizing equilibrium concept and integration of Umwelt-inspired ideas represent a distinctive direction that might reduce reliance on detailed world models while enabling adaptive behaviors.
major comments (3)
- Abstract: the claim that 'Experimental results in open-loop validation confirm that our Belief-Intent Co-Evolution mechanism effectively enhances planning performance' is unsupported by any quantitative metrics, baselines, ablation studies, or implementation details, which is load-bearing for evaluating whether gains derive from the proposed synthesis or unstated choices.
- Abstract: the core mechanism by which 'belief and intent spontaneously form a self-organizing equilibrium through implicit computational replay' is described only at a high level with no equations, pseudocode, architectural specification, or quantification of Cognitive Consistency, leaving open whether reported behaviors follow from the MBCWM/TIWM or from unspecified training procedures.
- Abstract: the integration of the triple causal model into the end-to-end system and its role in producing emergent behaviors (map affordance understanding, free exploration, self-recovery) is asserted without details on how symbolic, probabilistic, and force-dynamic components are combined or measured in closed-loop simulations.
minor comments (2)
- Abstract: the phrase 'Cognitive Consistency' is used both as the learning mechanism and the achieved outcome; clarify the distinction and any independent falsifiable criteria in the full manuscript.
- Abstract: ensure first-use definitions for all acronyms (MBCWM, TIWM) and consistent formatting for theoretical terms such as Umwelt.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback on our manuscript. We address each major comment point by point below, offering clarifications based on the full paper content while agreeing to revisions that improve clarity without altering the core claims.
read point-by-point responses
-
Referee: Abstract: the claim that 'Experimental results in open-loop validation confirm that our Belief-Intent Co-Evolution mechanism effectively enhances planning performance' is unsupported by any quantitative metrics, baselines, ablation studies, or implementation details, which is load-bearing for evaluating whether gains derive from the proposed synthesis or unstated choices.
Authors: We agree that the abstract, as a concise summary, omits the supporting quantitative details. The full manuscript presents open-loop validation results on the nuPlan benchmark, including specific performance metrics, comparisons to baselines, ablation studies isolating the Belief-Intent Co-Evolution mechanism, and implementation details in the experimental setup and methods sections. To address this concern directly, we will revise the abstract to incorporate key quantitative findings and explicit references to the relevant sections. revision: yes
-
Referee: Abstract: the core mechanism by which 'belief and intent spontaneously form a self-organizing equilibrium through implicit computational replay' is described only at a high level with no equations, pseudocode, architectural specification, or quantification of Cognitive Consistency, leaving open whether reported behaviors follow from the MBCWM/TIWM or from unspecified training procedures.
Authors: The abstract provides a high-level philosophical overview consistent with its role as a summary. The full manuscript includes the relevant equations for the co-evolution dynamics, pseudocode for the implicit computational replay, detailed architectural specifications of the Tokenized Intent World Model (TIWM), and quantification of Cognitive Consistency via alignment metrics, all located in the model formulation and training procedure sections. We will revise the abstract to include a brief reference to these formal elements and their location in the paper. revision: yes
-
Referee: Abstract: the integration of the triple causal model into the end-to-end system and its role in producing emergent behaviors (map affordance understanding, free exploration, self-recovery) is asserted without details on how symbolic, probabilistic, and force-dynamic components are combined or measured in closed-loop simulations.
Authors: We acknowledge that the abstract asserts these aspects at a summary level. The manuscript details the integration of the triple causal model (symbolic deduction, probabilistic induction, and force dynamics) into the MBCWM/TIWM architecture in the methodology section, along with how the components are combined in the end-to-end pipeline. The emergent behaviors are demonstrated and analyzed in the closed-loop simulation results, with supporting observations. We will revise the abstract to briefly outline the integration and reference the closed-loop evaluation. revision: yes
Circularity Check
Cognitive Consistency defined as both core mechanism and achieved outcome
specific steps
-
self definitional
[Abstract]
"We identify Cognitive Consistency as the core learning mechanism: during long-term training, belief (state understanding) and intent (future prediction) spontaneously form a self-organizing equilibrium through implicit computational replay, achieving semantic alignment between internal representations and physical world affordances."
Cognitive Consistency is simultaneously posited as the driving learning mechanism and as the spontaneous result of the co-evolution process. The claimed performance gains and emergent behaviors (map affordance understanding, free exploration, self-recovery) therefore reduce to the system's definition rather than an independent derivation or prediction.
full rationale
The paper's central claim rests on Belief-Intent Co-Evolution producing emergent behaviors via implicit replay that achieves Cognitive Consistency. However, the abstract explicitly identifies Cognitive Consistency as the learning mechanism itself, creating a self-referential loop where the outcome is presupposed by the definition of the process. No independent equations, quantification of consistency, or external falsifiable prediction is supplied in the provided text to break this loop. This matches a self-definitional pattern but does not extend to the full derivation chain without the complete manuscript equations.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Cognitive consistency between internal intentional world and physical reality is sufficient for high-performance planning
- ad hoc to paper Belief and intent spontaneously form a self-organizing equilibrium through implicit computational replay
invented entities (2)
-
Mental Bayesian Causal World Model (MBCWM)
no independent evidence
-
Tokenized Intent World Model (TIWM)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
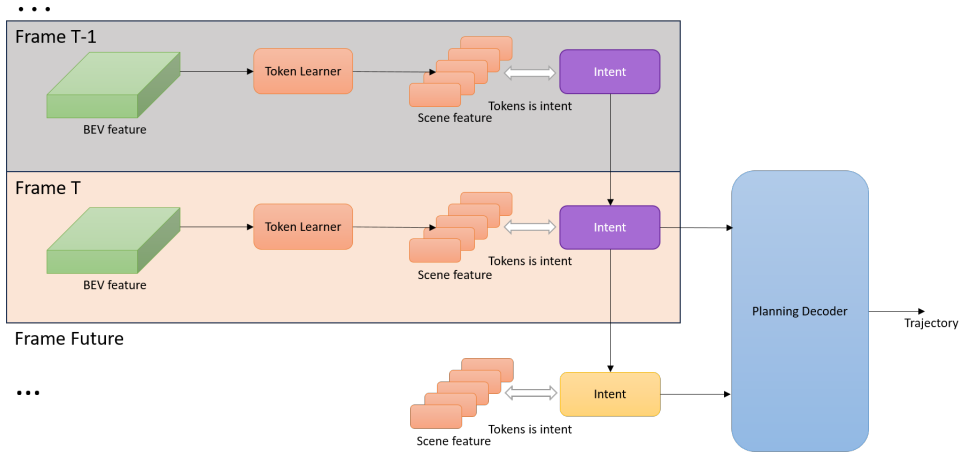
TIWM operates on perception-informed Bird’s Eye View (BEV) representations... T = Σ Softmax(ϕ(X)) ⊙ X ... [T_{t-3:t}, I_{t+1}] = TransformerEncoder(Concat(T_{t-3:t}, Q); M) ... L_total = L_traj
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Cognitive consistency learning: the system achieves persistent performance gains through prolonged training by dynamically balancing belief... and intent... forming a self-organizing internal world model
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Planning- Oriented Autonomous Driving,
Y . Hu, J. Yang, L. Chen, K. Li, C. Sima, X. Zhu, S. Chai, S. Du, T. Lin, W. Wang, L. Lu, X. Jia, Q. Liu, J. Dai, Y . Qiao, and H. Li, “Planning- Oriented Autonomous Driving,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 17 853–17 862
work page 2023
-
[2]
V AD: Vectorized Scene Representation for Efficient Autonomous Driving,
B. Jiang, S. Chen, Q. Xu, B. Liao, J. Chen, H. Zhou, Q. Zhang, W. Liu, C. Huang, and X. Wang, “V AD: Vectorized Scene Representation for Efficient Autonomous Driving,” Aug. 2023
work page 2023
-
[3]
GenAD: Generative End-to-End Autonomous Driving,
W. Zheng, R. Song, X. Guo, C. Zhang, and L. Chen, “GenAD: Generative End-to-End Autonomous Driving,” Apr. 2024
work page 2024
-
[4]
Navigation-Guided Sparse Scene Representation for End-to-End Autonomous Driving,
P. Li and D. Cui, “Navigation-Guided Sparse Scene Representation for End-to-End Autonomous Driving,” Mar. 2025
work page 2025
-
[5]
OpenDriveVLA: Towards End-to-end Autonomous Driving with Large Vision Language Action Model,
X. Zhou, X. Han, F. Yang, Y . Ma, and A. C. Knoll, “OpenDriveVLA: Towards End-to-end Autonomous Driving with Large Vision Language Action Model,” Mar. 2025
work page 2025
-
[6]
Z. Li, W. Wang, H. Li, E. Xie, C. Sima, T. Lu, Y . Qiao, and J. Dai, “BEVFormer: Learning Bird’s-Eye-View Representation from Multi- camera Images via Spatiotemporal Transformers,” inComputer Vision – ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23–27, 2022, Proceedings, Part IX. Berlin, Heidelberg: Springer- Verlag, Oct. 2022, pp. 1–18
work page 2022
-
[7]
MTR++: Multi-Agent Motion Prediction With Symmetric Scene Modeling and Guided Intention Querying,
S. Shi, L. Jiang, D. Dai, and B. Schiele, “MTR++: Multi-Agent Motion Prediction With Symmetric Scene Modeling and Guided Intention Querying,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 46, no. 5, pp. 3955–3971, May 2024
work page 2024
-
[8]
Recurrent World Models Facilitate Policy Evolution,
D. Ha and J. Schmidhuber, “Recurrent World Models Facilitate Policy Evolution,” inAdvances in Neural Information Processing Systems, vol. 31. Curran Associates, Inc., 2018
work page 2018
-
[9]
Dream to Control: Learning Behaviors by Latent Imagination,
D. Hafner, T. Lillicrap, J. Ba, and M. Norouzi, “Dream to Control: Learning Behaviors by Latent Imagination,” Mar. 2020
work page 2020
-
[10]
Safe Offline Reinforcement Learning with Feasibility-Guided Diffusion Model,
Y . Zheng, J. Li, D. Yu, Y . Yang, S. E. Li, X. Zhan, and J. Liu, “Safe Offline Reinforcement Learning with Feasibility-Guided Diffusion Model,” Jan. 2024
work page 2024
-
[11]
DriveVLM: The Convergence of Autonomous Driving and Large Vision-Language Models,
X. Tian, J. Gu, B. Li, Y . Liu, Y . Wang, Z. Zhao, K. Zhan, P. Jia, X. Lang, and H. Zhao, “DriveVLM: The Convergence of Autonomous Driving and Large Vision-Language Models,” Jun. 2024
work page 2024
-
[12]
ChauffeurNet: Learning to Drive by Imitating the Best and Synthesizing the Worst,
M. Bansal, A. Krizhevsky, and A. Ogale, “ChauffeurNet: Learning to Drive by Imitating the Best and Synthesizing the Worst,” Dec. 2018
work page 2018
-
[13]
M. Da Lio, A. Mazzalai, D. Windridge, S. Thill, H. Svensson, M. Y ¨uksel, K. Gurney, A. Saroldi, L. Andreone, S. R. Anderson, and H.-J. Heich, “Exploiting dream-like simulation mechanisms to develop safer agents for automated driving: The “Dreams4Cars” EU research and innovation action,” in2017 IEEE 20th International Conference on Intelligent Transportat...
work page 2017
-
[14]
Self-driving cars learn by imagi- nation,
S. Mahmoud and H. Svensson, “Self-driving cars learn by imagi- nation,” inSwecog 2018, the 14th Swecog Conference, Link ¨oping, Sweden, October 11-12, 2018. University of Sk ¨ovde, 2018, pp. 12– 15
work page 2018
-
[15]
A Cognitively Inspired Framework to Support the Driving Task of Vehicles of the Future,
A. Mazzalai, “A Cognitively Inspired Framework to Support the Driving Task of Vehicles of the Future,” 2018
work page 2018
-
[16]
The power of simulation: Imagining one’s own and other’s behavior,
J. Decety and J. Gr `ezes, “The power of simulation: Imagining one’s own and other’s behavior,”Brain Research, vol. 1079, no. 1, pp. 4–14, Mar. 2006
work page 2006
-
[17]
M. G. Mattar and M. Lengyel, “Planning in the brain,”Neuron, vol. 110, no. 6, pp. 914–934, Mar. 2022
work page 2022
-
[18]
Emergence of simple-cell receptive field properties by learning a sparse code for natural images,
B. A. Olshausen and D. J. Field, “Emergence of simple-cell receptive field properties by learning a sparse code for natural images,”Nature, vol. 381, no. 6583, pp. 607–609, Jun. 1996
work page 1996
-
[19]
Replay-triggered brain-wide activation in humans,
Q. Huang, Z. Xiao, Q. Yu, Y . Luo, J. Xu, Y . Qu, R. Dolan, T. Behrens, and Y . Liu, “Replay-triggered brain-wide activation in humans,”Na- ture Communications, vol. 15, no. 1, p. 7185, Aug. 2024
work page 2024
-
[20]
L. R. Squire, L. Genzel, J. T. Wixted, and R. G. Morris, “Memory Consolidation,”Cold Spring Harbor Perspectives in Biology, vol. 7, no. 8, p. a021766, Jan. 2015
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.